
 首页
首页 登录
登录 注册
注册




 下载:
下载:

-
双螺杆式真空泵具有结构简单、工作平稳、干式清洁无油等优点,可在复杂工况下稳定运行,在半导体、化学、食品和医疗等多个行业广泛应用[1]。
双螺杆真空泵的密封性、抽速以及极限真空度都由转子截面型线决定[2]。传统摆线-渐开线型截面型线,由齿顶圆弧、齿根圆弧、摆线和圆渐开线四条曲线组成[3]。然而,由这种传统截面型线生成的螺杆转子,存在以下问题:截面型线有尖点不完全啮合,接触线不连续且泄漏通道大。为了改进和提高其性能,学者们在该型线的基础上进行调整和优化,Ryazantsev V M [4]采用直线倒棱修正从动转子,将尖点由锐角修正为钝角,但并未修正主动螺杆转子,破坏转子啮合性。聂书彬[5]采用摆线替换直线进行修正,通过啮合方程求出共轭曲线,实现啮合,但不光滑和泄漏问题有待解决。巫修海等[6]提出了一种摆线修正型线,但仍存在不光滑点。王君等[7]使用圆弧修正螺杆爪尖,采用摆线等距曲线进行连接,解决了截面型线上存在尖点的问题。王君等[8]在爪式真空泵转子的摆线与齿顶圆弧连接处进行圆弧修正,解决了型线不光滑连接的问题。崔锋等[9]尝试采用偏心渐开线连接转子两端圆弧,但该方法型线参数要求苛刻,无法满足大部分齿形。郭东军[10]研发了一种双头转子型线,动平衡性能更好,且阴阳转子的型线相同,加工方便。Y Lu [11]提出了一种类阿基米德螺线连接齿背的截面型线,简化了型线组成,但型线参数条件严苛,不能适用大部分齿形。郭蓓等[12]提出了一种抛物线型转子型线,实现了型线全光滑连接,但有较大的泄漏三角区。学者I. Akutsu[13]和刘春姐等[14]进行相关设计,采用5齿的阳转子并使用6齿阴转子与之配合,分别尝试等螺距配合和变螺距配合的螺杆转子结构,但该转子齿头部分无法实现完全啮合,较大的泄漏三角形。Kawamura[15]对螺杆齿尖进行倒圆,螺杆转子不存在尖点但会破坏曲线的啮合性,造成泄漏。Xu等[16]使用椭圆弧修正三螺杆泵爪尖,相比较于直线和圆弧修正,泄漏三角形面积明显减小。Hsieh C F[17]为解决阿基米德螺线不能实现完全啮合且会产生较大泄漏的问题,用两段圆弧和两段摆线组成齿背曲线,减小了泄漏三角区但增加了螺杆转子型线设计难度。
总结以上文献,对齿背处空间接触线和爪尖泄漏三角形的研究较为短缺。为进一步优化提升转子性能,本文提出齿背处正弦螺旋线及其共轭曲线的啮合模型,采用椭圆弧修正螺杆转子爪尖,构建了一种新型全光滑转子,计算转子截面型线各段曲线方程,且对比了传统转子和新型螺杆转子相关几何特性和内部流场。对于改善双螺杆真空泵的运行稳定性有着重大作用。
全文HTML
-
本章首先求解齿背处正弦螺旋线及其共轭曲线的矩阵方程,并建立爪尖处椭圆弧修正方程,最后构建截面型线方程,完成对截面型线的求解。
-
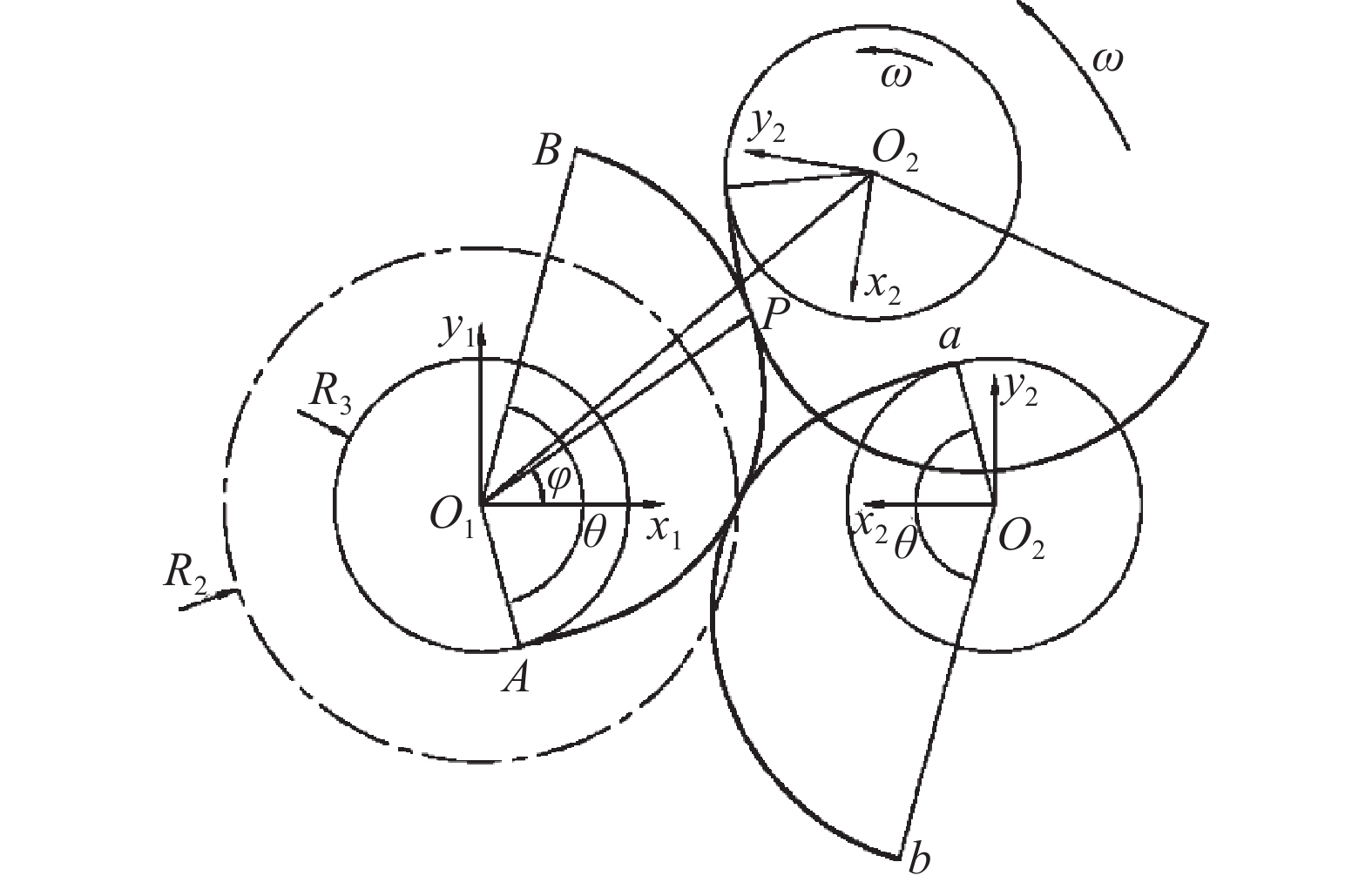
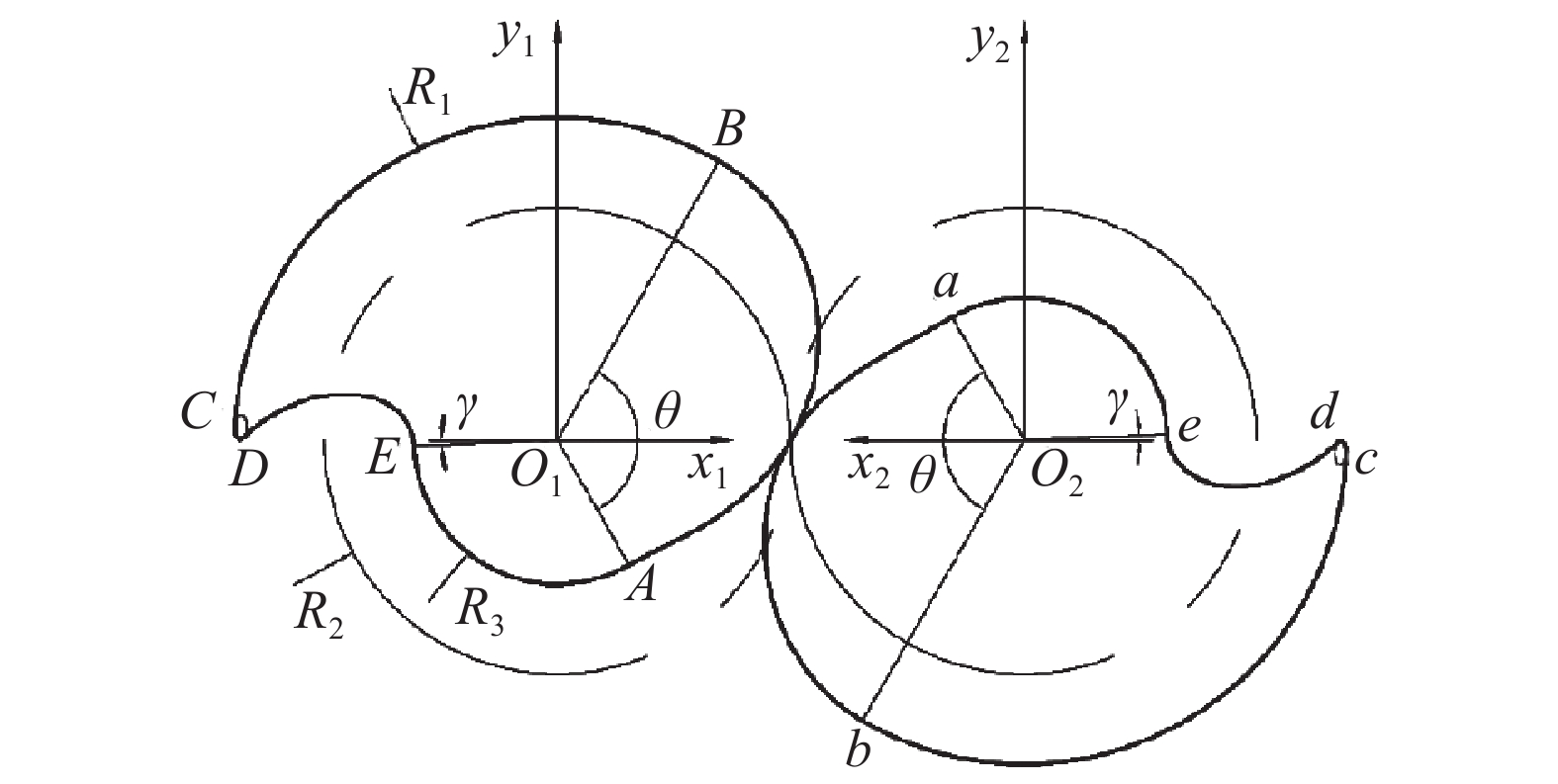
如图1所示,在左截面型线齿根圆弧取点作为点P的初始位置,绕中心点做匀速圆周运动,同时在O1P的方向做变速直线运动,当旋转角度为θ时,此时点P在齿顶圆弧上。由点P在射线O1P上的运动规律,以正弦函数设为速度分量,可得该方向位移分量为:
代入R(0)=R3,R(θ)=R1,可得P点的极坐标运动轨迹方程:
正弦螺旋线AB的矩阵方程为:
动坐标系xO1y上坐标点在动坐标系xO2y上的对应坐标值可表示为:
坐标变换矩阵如下:
式中:φ为截面型线的旋转角;
共轭曲线的包络条件为:
将式(6)带入坐标变换公式(4),消去φ,即可得到正弦螺旋线对应共轭曲线ab的方程。
-
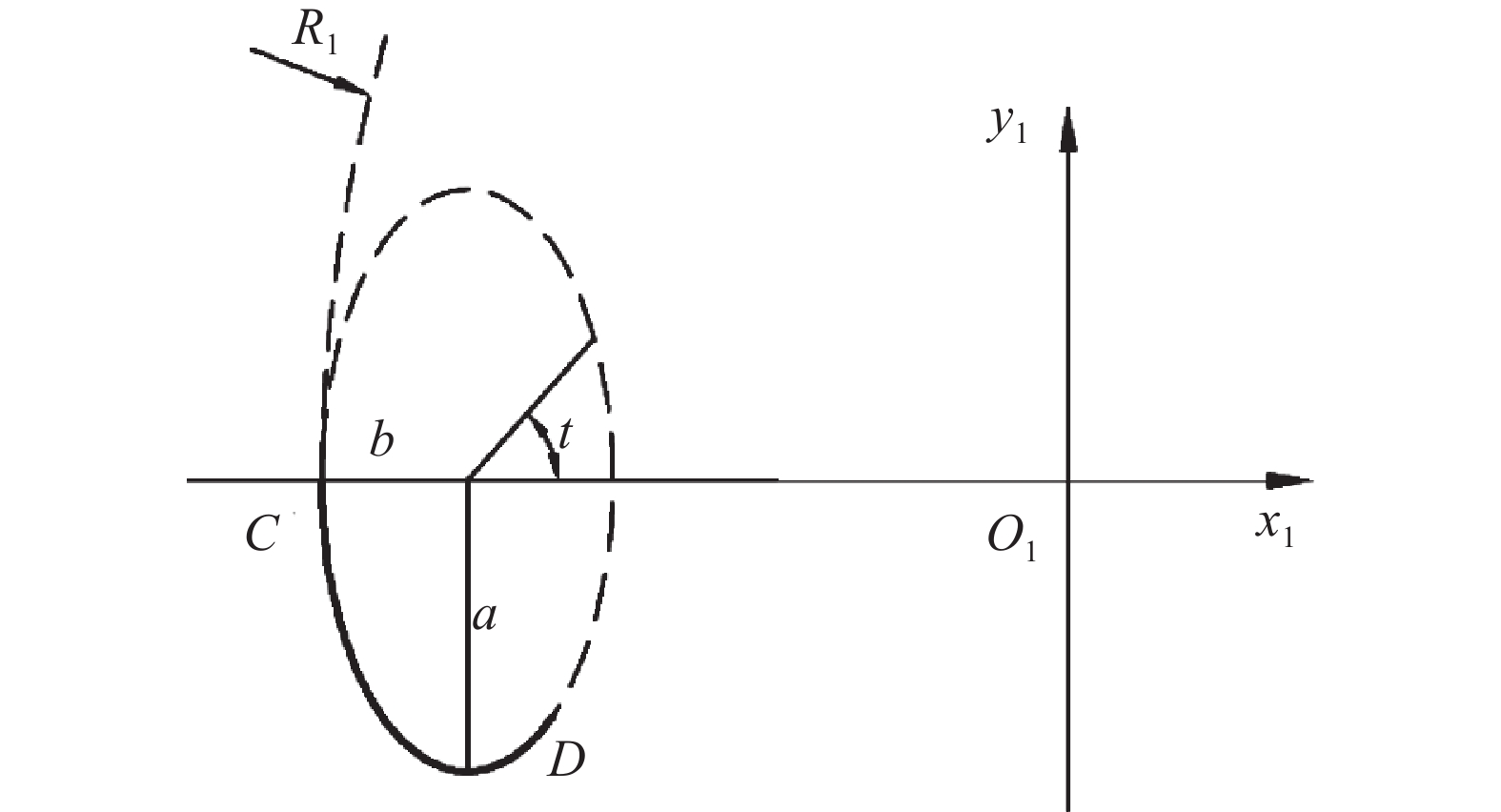
如图2所示,椭圆长半轴为a,短半轴为b,短半轴与齿顶圆R1的半径方向一致,C点与齿顶圆R1相切,即椭圆中心距离齿顶圆圆心为R1−b,t为参数角。
椭圆弧方程如下:
同样根据齿廓法线法得到曲线共轭啮合条件:
得到
将φ带入M12中,得到椭圆弧的共轭曲线:
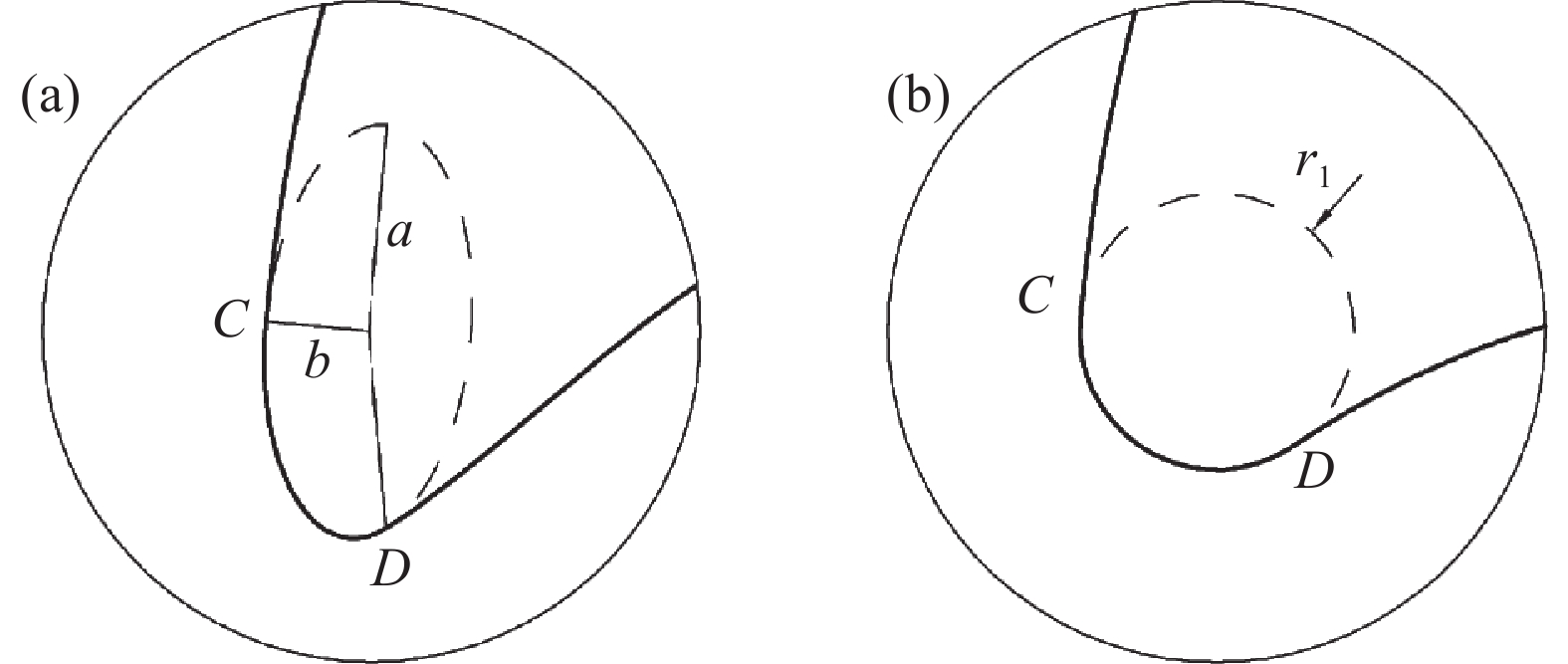
a、b比值不同时修正椭圆弧有不同的形式,a>b时为长半轴修正如图3(a)所示,a=b时为现有的圆弧修正,如图3(b)所示。
-
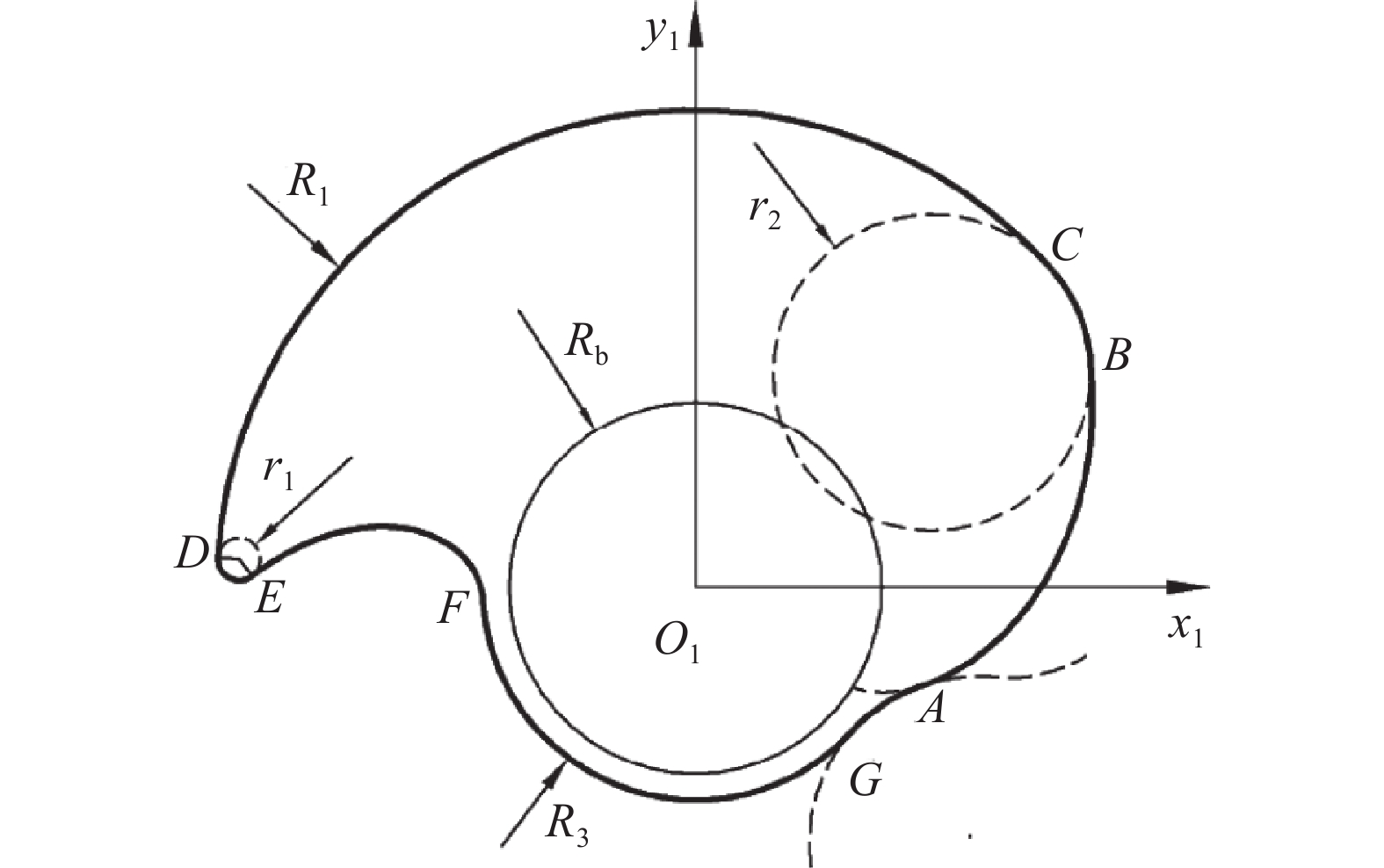
现有螺杆转子如图4所示。使用一段正弦螺旋线替代渐开线、圆弧和摆线等距曲线光滑的连接齿根圆弧和齿顶圆弧,采用椭圆弧长半轴修正替代圆弧修正,由此构建了一种正弦螺旋线-椭圆弧型转子截面型线。
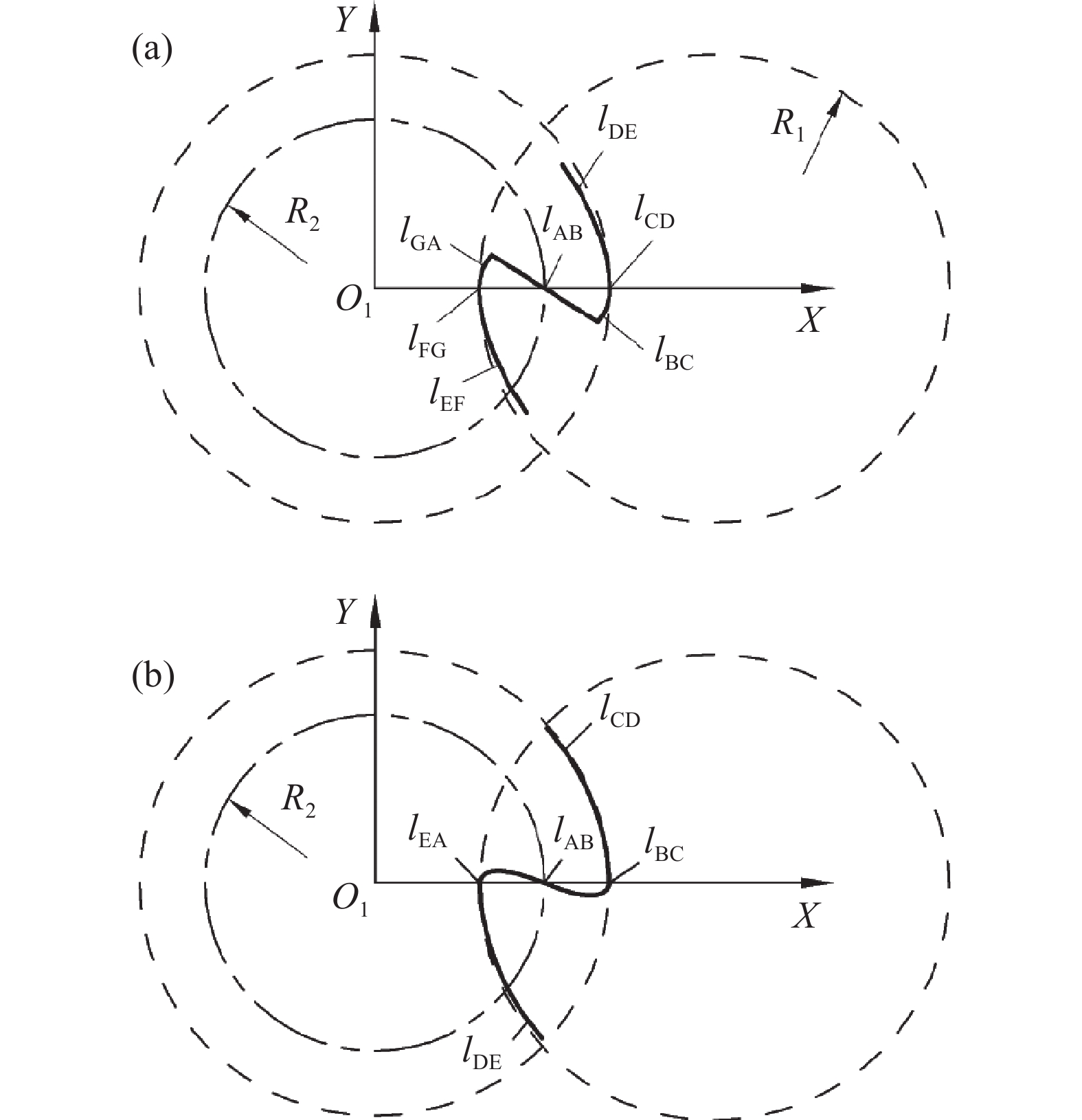
如图5所示,主动轴转子截面型线曲线由正弦螺旋线、齿顶圆弧、椭圆弧、椭圆弧对应包络线以及齿根圆弧构成,分别对应图中AB、BC、CD、DE、EA,确定方法如下:
式(3)顺时针旋转θ/2可得正弦螺旋线AB的矩阵方程:
式中M3表示旋转变换,变换矩阵如下:
齿尖椭圆弧CD的矩阵方程为:
式中:
$ \gamma $ —旋转角度,可由下式确定:即椭圆弧与其共轭曲线光滑连接的条件,交点处导数相等。
椭圆弧包络线DE的方程为
$ {\mathbf{r}}_1^{CD}\left( t \right) $ 的包络线方程。主动轴转子截面型线绕中点中心对称可得从动轴转子截面型线对应曲线。
2.1. 齿背正弦螺旋线求解
2.2. 爪尖椭圆弧修正模型
2.3. 截面型线方程
-
本章分析对比了传统截面型线和本文新提出的截面型线的几何特性,分别从端面啮合特性、空间接触线以及泄漏三角形三个方面进行。
-
分析全光滑的螺杆转子型线的啮合特性,并且求解各个组成曲线的啮合线:
其中M01表示从动坐标系x1O1y1到静坐标系XO1Y的变换方程:
假定爪尖修正均从C点开始,也就是齿顶和齿背对应的圆心角相等,得到圆弧-摆线型端面啮合线,如图6(a)所示,正弦螺旋线-椭圆弧型啮合线如图6(b)所示。
啮合线可以直接反映出空间接触线的最高点,从图中可以看出正弦螺旋线-椭圆弧型的啮合点更高,更接近气缸孔交线。
-
双螺杆真空泵加工时存在预留间隙,在运行时,高压腔气体向低压腔泄漏主要有两个通道:周向泄漏和沿侧向泄漏,在其他条件相同时,螺杆转子齿厚越厚,空间接触线越短,密封性能越好。
对接触线长度影响最大的是齿背曲线,提出的新型转子采用正弦螺旋线替代圆弧、渐开线、摆线等距曲线。取齿顶圆弧R1=100 mm,齿根圆弧R3=40 mm,螺距P=120 mm,控制渐开线生成圆半径和螺旋线中心角,使两种转子具有相同的转子齿厚,对比结果如表1和图7所示,图7(a)表示圆弧-摆线等距曲线型转子的空间接触线,图7(b)表示正弦螺旋线-椭圆弧型转子的空间接触线。
可见,采用正弦螺旋线比圆弧渐开线具有更短的空间接触线,长度缩短了2.54%,圆弧-摆线等距曲线型转子空间接触线长且不光滑,正弦螺旋线-椭圆弧型转子具有光滑且较短的空间接触线,具有更好的级间密封效果,减少泄漏。
-
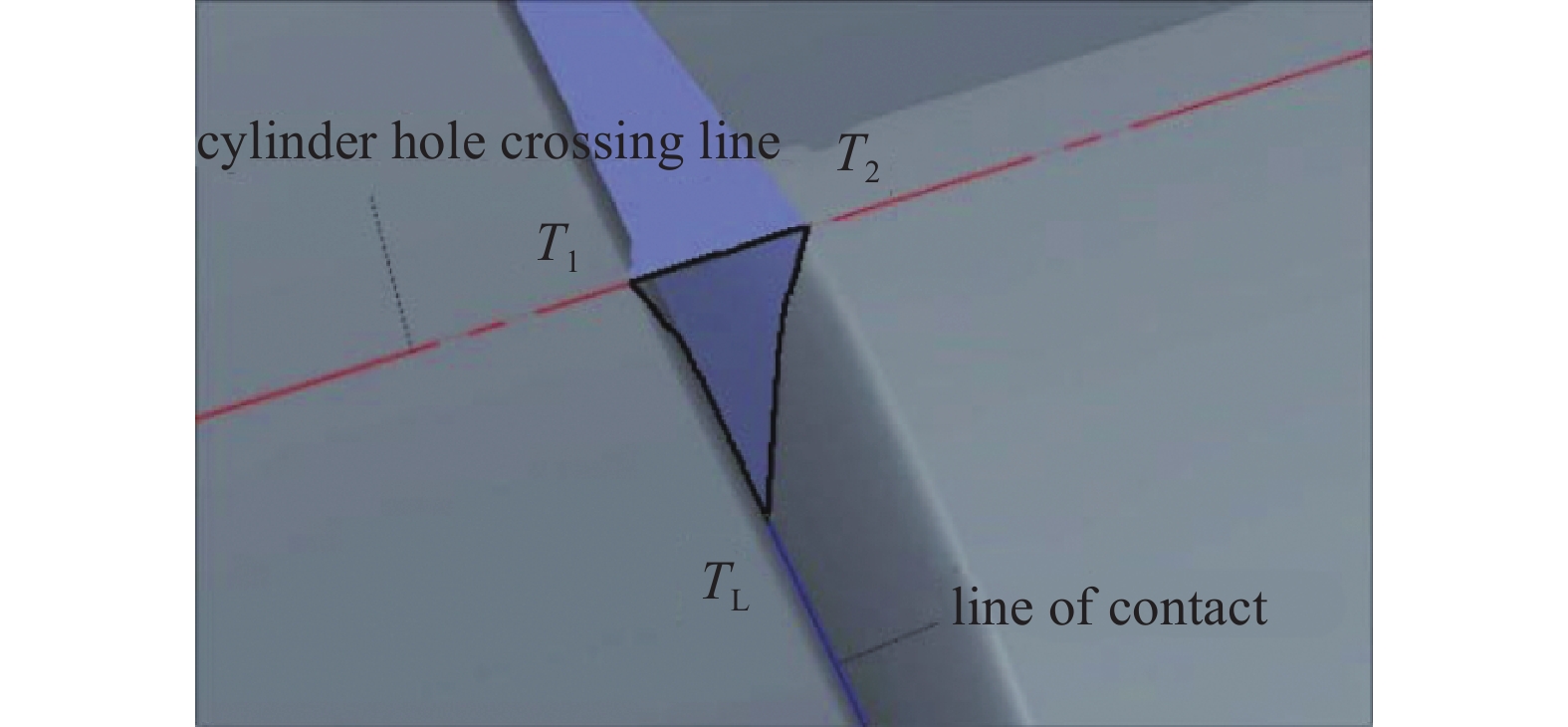
如图8所示,两个螺杆转子在发生啮合时,螺旋齿面和内壁之间会产生泄漏三角形;泄漏三角形会导致气体从高压腔泄漏到相邻的低压腔,泄漏三角形会严重影响双螺杆真空泵的运行效率和级间泄漏。
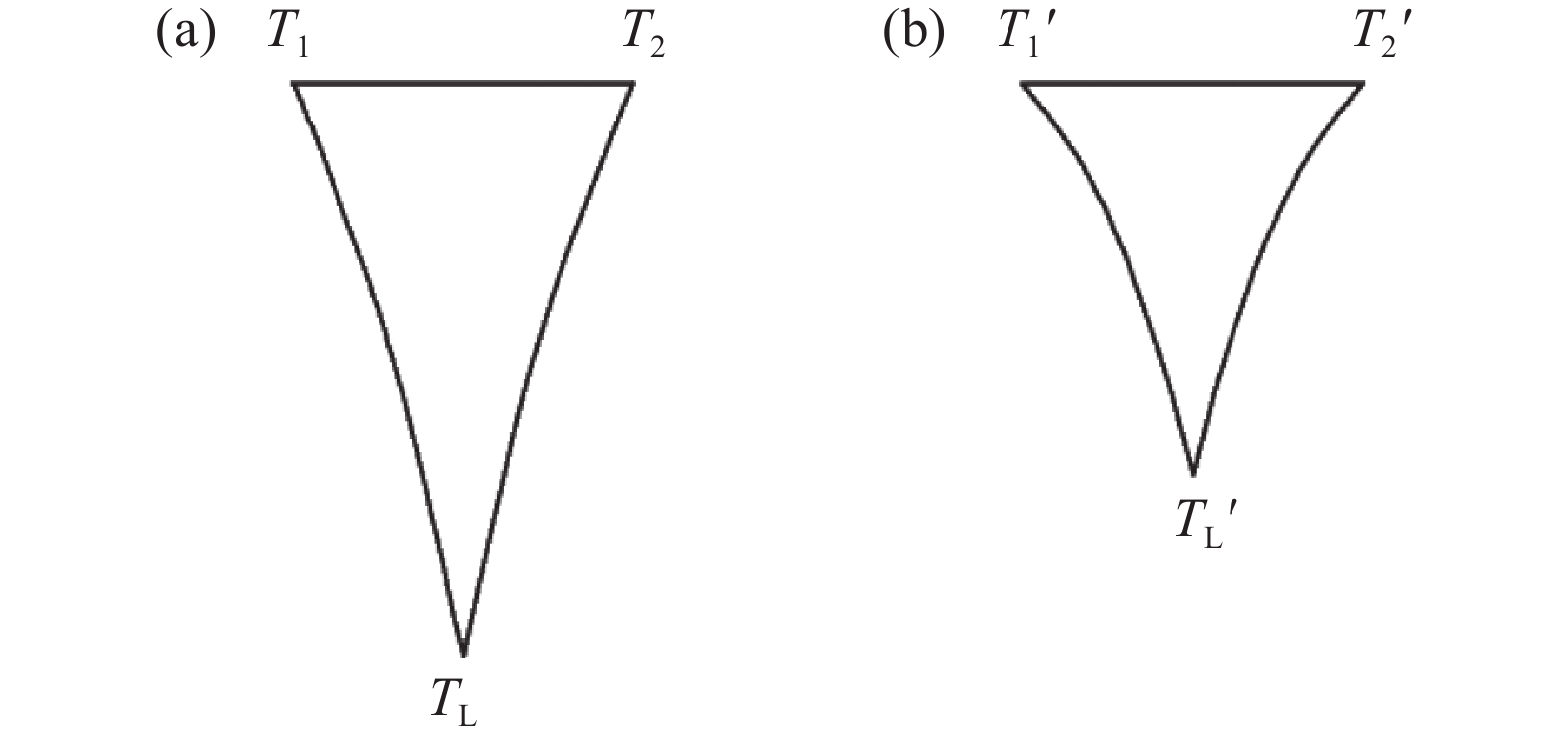
影响气体泄漏量的主要因素是气体流线垂直泄漏三角形形成的面积。图8中T1、T2为气缸孔交线与阴阳两转子形成的相交点,TL则是空间接触线的最高位置。图9(a)和图9(b)分别为传统螺杆转子和本文新型的泄漏三角形对应的垂直面积。
由图9可以看出椭圆弧爪尖的接触线更靠近泵腔交线,TL的位置更高,泄漏三角形面积如表2所示,椭圆弧修正后泄漏三角形面积为圆弧修正的72.23%,有效减小了泄漏量。
3.1. 端面啮合特性对比
3.2. 空间接触线对比
3.3. 泄漏三角形对比
-
本章对螺杆转子和泵腔进行网格划分,并验证其网格无关性,最终得出内部流场的压力分布,对比分析新型螺杆转子和传统螺杆转子的泄漏情况。
-
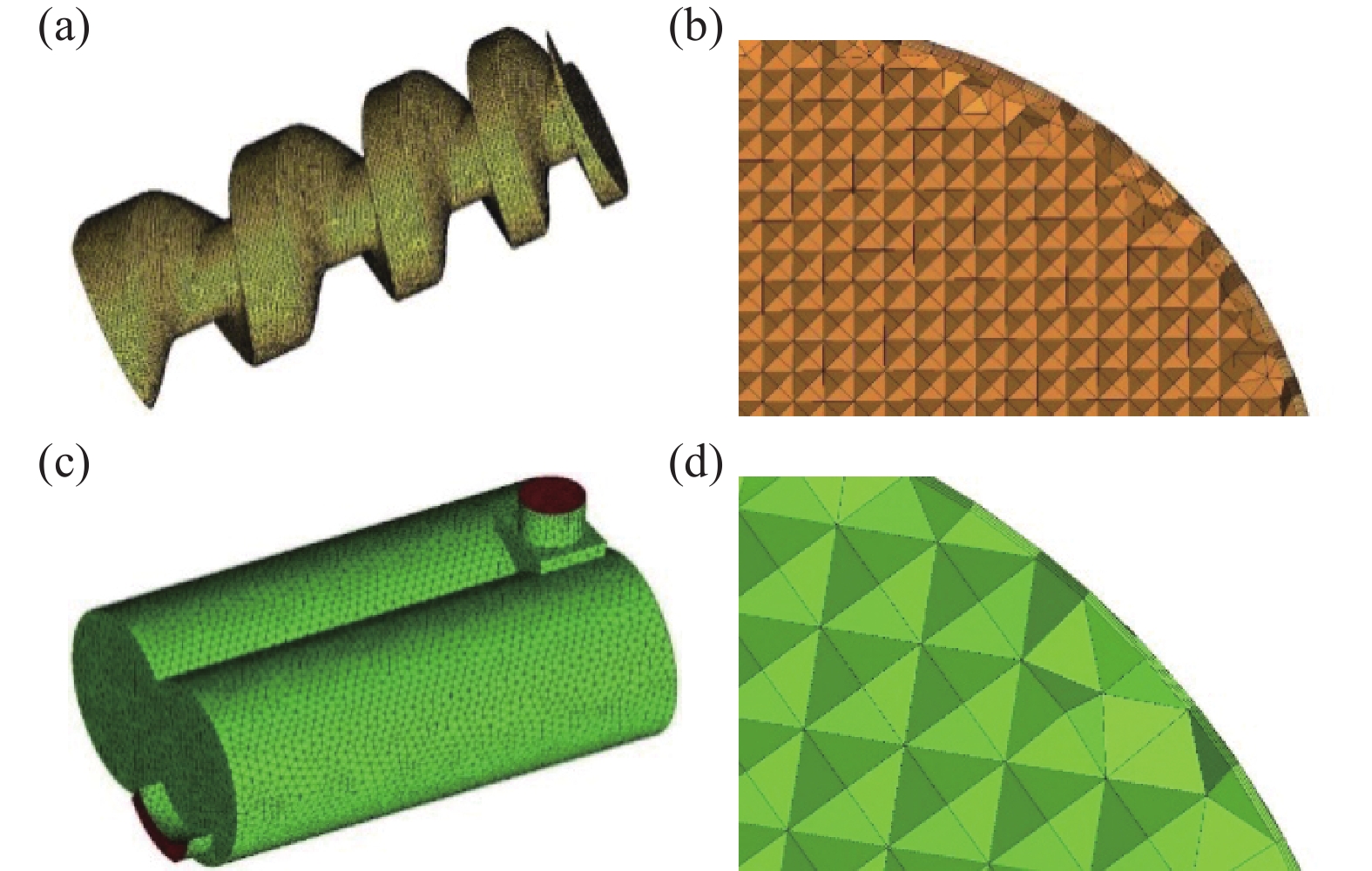
对螺杆转子进行体网格划分,网格最大尺寸选为2 mm,网格种类选择四面体网格,并在转子最外层生成5层棱柱网格来提高转子描述精度,最大尺寸设成2 mm,第一层网格高度取0.1 mm,厚度比取1.1,生成5层网格,如图10(a),(b)所示。对泵腔流体域设置出入口相关条件方便计算,泵腔网格最大尺寸选择3 mm,并在泵腔最外层继续生成3层棱柱网格以提高精度,网格最大尺寸2 mm,将第一层网格高度取为0.1 mm,厚度比1.1,生成3层网格如图10(c),(d)所示。
-
泵腔流体域选用k-Epsilon湍流模型,材料选择25℃空气,连续流体,无浮力,域运动为静止。边界条件操作环境设为绝压状态,入口压力20 kPa,出口压力100 kPa,流体性质为亚声速,流动方向为垂直于出入口边界。
-
分别尝试243657、603547和956214数量的网格对流场进行模拟,检测出口处平均质量流量。平均质量流量分别为2.254×10−2 kg/s、3.785×10−2 kg/s和3.955×10−2 kg/s,网格数为603547和956214时,质量流量误差为4.491%,由此得出网格尺寸对模拟结果影响较小的结论。使用网格数量为603547模拟数据作为最终结果。
-
通过内部流场的数值模拟,对正弦螺旋线-椭圆弧螺杆转子和传统圆弧-摆线等距曲线型螺杆转子进行对比,来验证新型螺杆转子的密封性能。
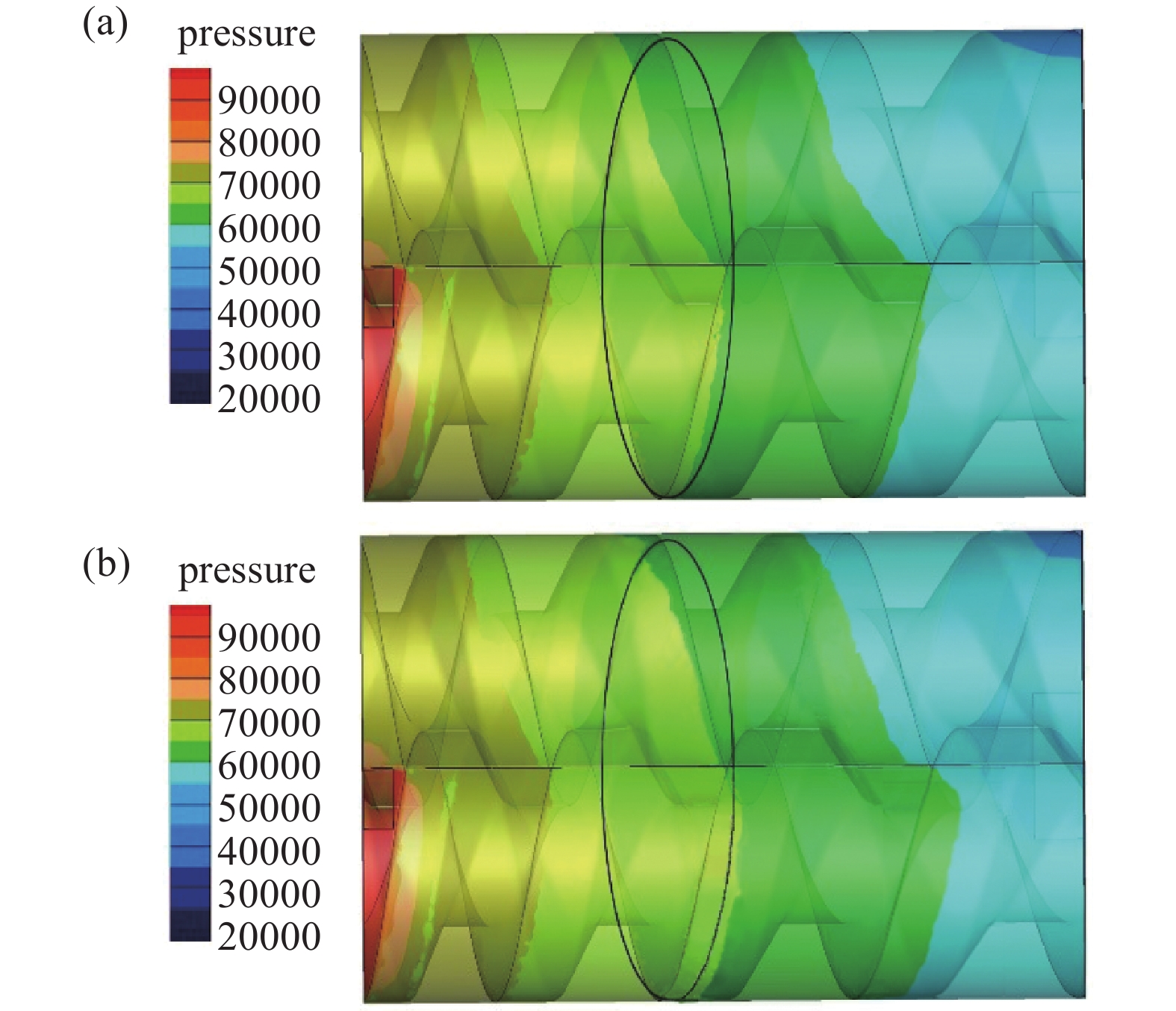
如图11所示,为内部流场的压力分布。螺杆转子进行同步异向双回转运动,吸入口吸气至工作腔吸满,工作腔向排气口逐渐移动;在运送过程中,压缩工作腔容积,压力升高;当工作腔与排气口接通时,螺杆转子排出气体,从而实现了双螺杆真空泵的一个运行循环。
图11(a)为正弦螺旋线-椭圆弧螺杆转子 内部流场的压力分布,图11(b)为传统圆弧-摆线等距曲线型螺杆转子内部流场的压力分布;由图可知,加工过程预留间隙会导致严重的级间泄漏,图11(a)中标记位置处高压气体泄漏深度远小于图11(b),出现该情况是由于新型螺杆转子采用椭圆弧优化,减小泄漏三角形面积,提高了齿顶面处的密封性能。
4.1. 网格划分
4.2. 流体域及边界条件设置
4.3. 网格无关性验证
4.4. 内部流场分析
-
(1)设计了一种正弦螺旋线-椭圆弧转子,建立正弦螺旋线及其共轭曲线的啮合模型,采用该曲线解决了传统圆弧渐开线型齿背曲线构成空间接触线长的问题;建立了爪尖椭圆弧修正模型,解决了现有圆弧爪尖修正泄漏三角形面积过大的问题。
(2)分别比较了正弦螺旋线-椭圆弧转子和现有圆弧-摆线等距曲线型转子的空间接触线长度、泄漏三角形面积,空间接触线缩短2.54%,泄漏三角形面积减小了27.77%,;构建的正弦螺旋线-椭圆弧转子具有连续光滑,空间接触线短,泄漏三角形面积小等优点。
(3)对所提出的正弦螺旋线-椭圆弧转子和现有圆弧-摆线等距曲线型转子进行流场压力分布对比,提出的新型转子具有较小的齿顶压力泄漏深度,齿顶面处具有更优良的密封性能。