
 首页
首页 登录
登录 注册
注册



-
近年来水下目标正朝着多样化、规模化、隐形化快速发展, 目标辐射噪声级不断减低, 加之目标数量不断增多, 这种复杂的信号环境给目标检测与跟踪带来极大挑战[1-3]。现有的目标检测与跟踪通常分成两步进行, 先利用最小方差无失真响应(MVDR)[4]、多重信号分类(MUSIC)[5]、稀疏贝叶斯学习(SBL)[6]等阵列信号处理方法检测有无目标以及目标的方位角, 再将检测结果作为观测输入, 通过递归贝叶斯滤波、数据关联等方法得到时间上连续的目标运动轨迹[3]。然而, 这种分步处理方式会带来信息损失, 特别在低信噪比、密集多目标等非理想信号环境下存在一定的局限性。一方面, 在低信噪比条件下会漏检一些弱目标, 同时产生大量虚假目标, 这大大增加了数据关联的难度, 一旦出现关联错误将导致轨迹偏离甚至错跟; 另一方面, 当多个目标方位历程出现交叉时, 受阵列孔径和算法性能限制, 空间谱呈现单峰形态, 往往只能输出一个方位检测结果, 连续多次的漏检将导致轨迹中断。
检测前跟踪(TBD)[7]技术直接对声呐原始数据进行联合检测与跟踪处理, 避免了阈值检测带来的信息损失, 也无需复杂的数据关联, 为解决复杂信号环境下检测跟踪问题提供了新的思路。声呐原始数据提供了更加丰富的信息, 但具有较强的非线性、非高斯特性, 同时也受到场景中多个目标与环境噪声的共同作用, 任一目标状态或噪声的变化均会对其产生影响。因此, 如何处理这种非标准观测成为TBD技术亟待解决的瓶颈问题。作为非线性、非高斯递归贝叶斯滤波的基本工具之一, 研究人员尝试利用粒子滤波(PF)解决该问题, Northardt等提出了基于空间谱观测的粒子滤波检测前跟踪(PF-TBD)方法, 使用波束形成输出的空间谱作为观测, 引入点扩散函数描述空间谱与目标状态的映射关系, 用于构建似然函数并更新粒子权重, 海试结果表明该方法在多达8个目标场景下实现了稳定跟踪[8-9]。金盛龙等对PF-TBD算法的重采样环节进行改进, 利用遗传算子和准蒙特卡罗方法解决粒子多样性匮乏问题, 提升了跟踪精度和鲁棒性[10]。王燕等采用并行分区的思想提升邻近目标的跟踪性能[11]。然而, 上述粒子滤波方法仅适用目标数固定不变的理想场景。
为应对目标数未知且时变的复杂场景, Mahler创新性地引入了随机有限集(RFS)理论, RFS是元素互异、无序且数目可变的有限集合, 非常适合描述多目标状态的不确定性以及目标新生、消亡和演变等过程[12-14]。RFS-TBD方法可以分为两类, 一类是无标签RFS-TBD方法, 包括概率假设密度 (PHD) 滤波器[15]和集势概率假设密度(CPHD) 滤波器[16-17]等, 这类算法仅递归传递多目标概率密度函数的统计矩及势分布, 这与卡尔曼滤波器仅传递统计矩的思想类似。但是, 对于声呐数据这类特殊观测, 需要计算多维的集合积分, 通常不存在解析解。针对该问题, Saucan等[16]和Masnadi-Shirazi等[17]提出了基于叠加近似的CPHD-TBD算法, 利用变量替换与Campbell定理消除多维的集合积分, 并推导出了统计矩及势分布的近似解表达式, 侧扫声呐实测数据验证了算法的有效性。针对多目标状态提取时聚类算法会影响跟踪性能的问题, Zhang等将每个单目标概率密度函数单独近似为伯努利分布, 提出了基于叠加近似的多伯努利检测前跟踪(MB-TBD)算法, 避免了多目标状态提取时聚类算法对跟踪性能的影响, 有效提升了跟踪精度[18]。由于集合的元素是无序的, 因此无标签RFS方法只能估计多目标状态, 不能形成时间连续的运动轨迹。为此, Vo等对每个目标状态加入特定标签, 用来表示目标状态与某条轨迹的隶属关系[19-20], 以区分不同目标的运动轨迹, 标签RFS-TBD方法包括标签多伯努利(LMB)滤波器[21]、广义标签多伯努利(GLMB)滤波器[22]等。但是, 非线性和非标准观测带来的多维积分在计算上依然难以处理, 需要启发式或者原理性近似方法。针对该问题, Li等提出了基于目标分组的近似LMB-TBD方法[21], 该方法假设不同目标对观测的影响可以相互分离, 通过目标分组将高维积分降为多组一维积分, 雷达及室内声学传感器数据验证了算法的有效性。但是, 声呐数据是所有目标入射信号与背景噪声的叠加, 观测与所有目标状态具有强相关性, 因此这种启发式的目标分组方法并不适用。
本文面向方位历程交叉场景, 提出了一种广义标签多伯努利检测前跟踪(GLMB-TBD)方法。该方法无需波束形成、峰值检测等预处理, 直接将声呐基阵接收数据构造的协方差矩阵作为观测, 保留了目标方位、入射信号功率等信息, 由于协方差矩阵观测服从复威沙特分布(Complex Wishart, CW), 本文利用复威沙特分布与复逆威沙特分布(Complex Inverse Wishart, CIW)的共轭性质, 通过变量替换推导得出了后验分布近似解表达式, 解决了多维积分难以计算的问题。仿真和海试试验分别对比了GLMB-TBD方法与其他方法的目标数估计与方位跟踪精度, 验证了所提方法在方位历程交叉场景下的有效性和可行性。
-
在复杂的多目标场景下, 目标数量和对应目标状态均具有随机性, k时刻多目标状态可表示为有限集合的形式:
式中, n表示目标数量,
${\boldsymbol{x}} = (\widetilde {\boldsymbol{x}},\ell )$ 表示单目标状态, 由运动状态向量$\widetilde {\boldsymbol{x}} \in \mathbb{X}$ 和标签$\ell \in \mathbb{L}$ 组合构成,$ \mathbb{X} $ 表示状态空间,$ \mathbb{L} $ 表示离散且可数的标签空间。标签$\ell = ({t_{\text{B}}},j)$ 由有序整数对表示,${t_{\text{B}}} \leqslant k$ 表示目标新生时刻, 索引$j$ 用来区分${t_{\text{B}}}$ 时刻新生的目标。$\mathcal{L}:\mathbb{X} \times \mathbb{L} \to \mathbb{L}$ 表示从超空间$\mathbb{X} \times \mathbb{L}$ 到标签空间$ \mathbb{L} $ 的投影,${X_k}$ 的标签投影表示成$\mathcal{L}({X_k}) = \{ {\ell _1}, \cdots ,{\ell _n}\} $ 。为确保各个目标标签的唯一性, 避免标签重复出现, 标签RFS要求多目标状态与其标签集合的元素数量相同, 即$|{X_k}| = |\mathcal{L}({X_k})|$ 。定义标签互异检测器用于保证标签RFS中所有元素的标签互异: -
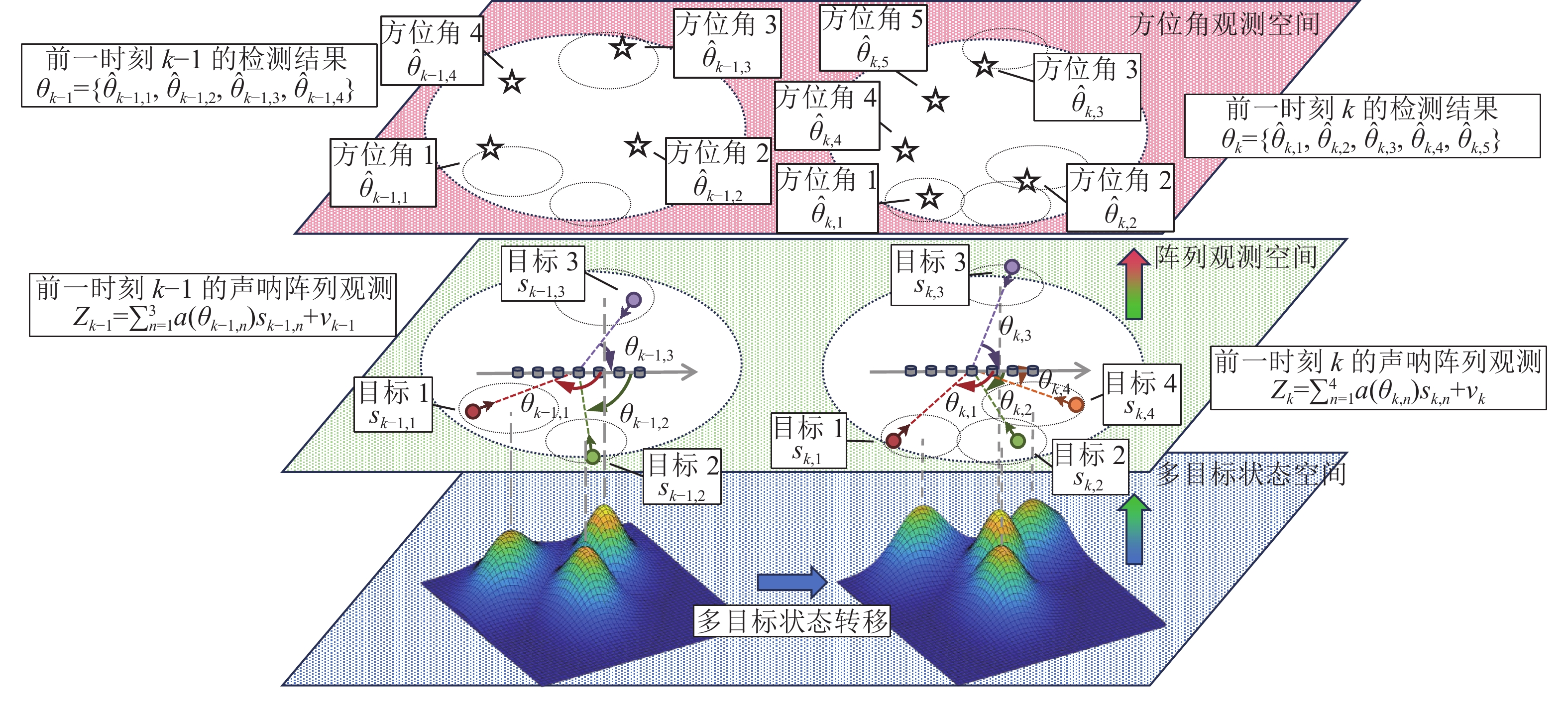
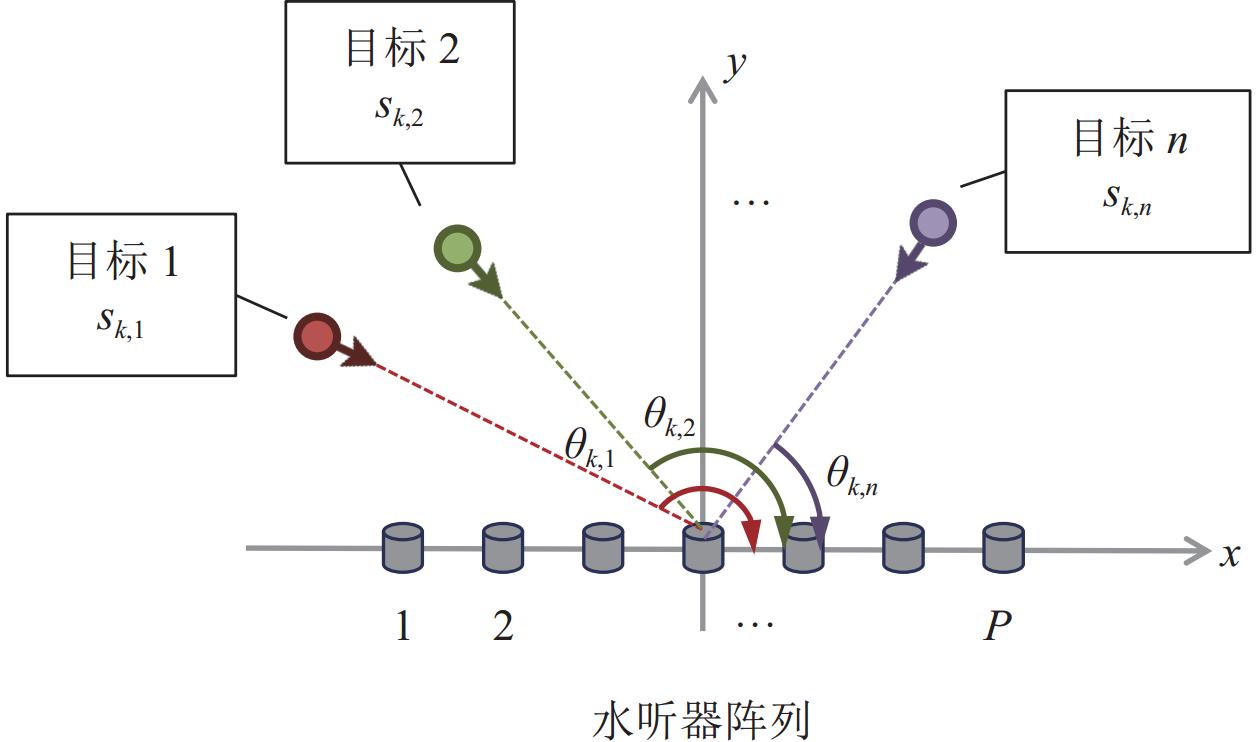
水听器阵列由P元各向同性的水听器均匀排列而成, k时刻有n个目标位于阵列远场, 阵列接收信号是各个目标从
${\theta _{k,1}}, \cdots ,{\theta _{k,n}}$ 方向入射的窄带信号与各向同性环境噪声构成, 如图1所示。假设相邻时刻的时间周期内有M个连续快拍, 则k时刻第p个水听器的接收信号为
式中, fc是入射信号频率, d是阵元间距, c是声波的传播速度,
$ {{\boldsymbol{s}}_{k,i}} = [{s_{k,i}}(1), \cdots ,{s_{k,i}}(M)] \in {\mathbb{C}^{1 \times M}} $ 是第i个目标的入射信号, 服从均值为0方差为$\sigma _{k,i}^2{{\boldsymbol{I}}_M}$ 的多元复高斯分布,${{\boldsymbol{I}}_M}$ 表示$ M \times M $ 维单位矩阵, 写作$\mathcal{C}\mathcal{N}({{\boldsymbol{s}}_{k,i}};{\boldsymbol{0}},\sigma _{k,i}^2{{\boldsymbol{I}}_M})$ ,$ {{\boldsymbol{v}}_{k,p}} = [{v_{k,p}}(1), \cdots ,{v_{k,p}}(M)] \in {\mathbb{C}^{1 \times M}} $ 是第p个传感器的观测噪声, 服从均值为0方差为$\sigma _v^2{{\boldsymbol{I}}_M}$ 的多元复高斯分布, 写作$ \mathcal{C}\mathcal{N}({\boldsymbol{v}_{k,p}};{\boldsymbol{0}},\sigma _v^2{{\boldsymbol{I}}_M}) $ , 假设不同时刻和不同阵元上的观测噪声相互独立。水听器阵列接收信号为
式中,
$ {\boldsymbol{a}}({\theta _i}) = {[1,{{\rm{e}}^{ -{\rm{ j}}2\pi {f_c}d\cos {\theta _i}/c}}, \cdots ,{{\rm{e}}^{ - {\rm{j}}2\pi {f_c}(P - 1)d\cos {\theta _i}/c}}]^{\rm{T}}} \in {\mathbb{C}^{P \times 1}} $ 表示第i个目标入射信号的阵列响应向量, 上角标T表示矩阵转置,$ {{\boldsymbol{V}}_k} = {[{{\boldsymbol{v}}_{k,1}},{{\boldsymbol{v}}_{k,2}}, \cdots ,{{\boldsymbol{v}}_{k,P}}]^{\text{T}}} \in {\mathbb{C}^{P \times M}} $ 表示阵列的观测噪声矩阵。 -
对于先检测后跟踪方法, 检测过程存在漏检、虚警等情况, 检测到的方位角数量具有随机性, 因此观测也可以表示成有限集合形式, 记作
$ {\varTheta _k} = \{ {\hat {\theta} } _{k,1}, \cdots ,{\hat {\theta} } _{k,m} \} $ , m表示检测到的方位角数量。由于观测集合由目标生成的检报集和噪声导致的虚警集构成, 因此可以表示成如下的并集形式:式中,
$ {C_k} $ 表示虚警集,$ {D_k}({\boldsymbol{x}}) $ 表示目标$ x $ 生成的检报集, 只可能为空集或只包含一个元素, 当集合为空表示目标$ {\boldsymbol{x}} $ 漏检, 即$ {D_k}({\boldsymbol{x}}) = \emptyset $ , 集合内只包含一个元素表示目标$ {\boldsymbol{x}} $ 被检测到且对应方位角为$\hat{\theta } $ , 即$ {D_k}({\boldsymbol{x}}) = \hat{\theta}$ 。对于检测前跟踪方法, 观测是阵列接收信号
$ {{\boldsymbol{Z}}_k} $ 构造的协方差矩阵:式中, 上角标H表示矩阵的共轭转置,
${{\boldsymbol{R}}_{{Z_k}}}$ 是$ P \times P $ 维对称正定矩阵, 且服从自由度为M, 尺度矩阵为${\boldsymbol{\varGamma}} $ 的CW分布[23], 写作$\mathcal{C}{\mathcal{W}_P}({{\boldsymbol{R}}_{{Z_k}}};M,{\boldsymbol{\varGamma}} )$ 。假设环境噪声功率
$\sigma _v^2$ 已知, 未知目标状态包括方位$\theta $ 和入射信号功率${\sigma ^2}$ , 单目标运动状态建模为${\widetilde {\boldsymbol{x}}_{k,i}} = {[{\theta _{k,i}},{\dot \theta _{k,i}},\sigma _{k,i}^2]^{\rm{T}}}$ 。给定多目标状态${X_k}$ , 多目标似然函数为式中,
${\text{tr(}} \cdot {\text{)}}$ 表示矩阵的迹,$ {\widetilde \varGamma _P}[M] $ 表示多变量复伽马函数[24], 尺度矩阵表示为先检测后跟踪与检测前跟踪的观测空间对比如图2所示。先检测后跟踪方法对应方位角观测空间, 方位角检测结果用五角星表示, k−1时刻共有4个方位角, 其中2个位于目标的误差半径内, 说明是目标生成的方位角, 另外2个是虚警, k时刻共有5个方位角, 其中3个位于目标的误差半径内, 说明是目标生成的方位角, 另外2个是虚警。检测前跟踪方法对应阵列观测空间, 声呐阵列观测包含了所有目标的完整信息。
-
在最优多目标贝叶斯滤波框架下, 广义标签多伯努利(GLMB)分布提供了一种闭式解形式, 也就是说, 假设多目标概率密度函数服从GLMB分布, 在贝叶斯框架下进行预测、更新后, 得到的多目标概率密度函数仍服从GLMB分布。GLMB分布定义为[25-26]
式中, 求和符号表示该分布由多种假设构成, 对于其中任意一种假设,
$\mathcal{L}(X) = \{ {\ell _1}, \cdots ,{\ell _n}\} $ 表示$X$ 的标签集,${w^{(I)}}$ 表示对应的假设权重,$ {[{p^{(I)}}]^X} \triangleq \prod\nolimits_{{\boldsymbol{x}} \in X} {{p^{(I)}}({\boldsymbol{x}})} $ 表示$X$ 中所有目标概率密度函数的累乘, 且满足$\sum\nolimits_{I \in \mathcal{F}(\mathbb{L})} {{w^{(I)}}} = 1$ 以及$ \int {{p^{(I)}}({\boldsymbol{x}}){\rm d}{\boldsymbol{x}}} = 1 $ 。$\mathcal{F}(\mathbb{L})$ 表示标签空间全体有限子集构成的超空间, 狄拉克函数${\delta _I}(\mathcal{L}(X))$ 用于保证标签集$\mathcal{L}(X)$ 属于标签空间, 当且仅当$I = \mathcal{L}(X) \in \mathcal{F}(\mathbb{L})$ 时${\delta _I}(\mathcal{L}(X)) = 1$ 。 -
给定先验GLMB分布
${\pi _{k - 1}} \, (\,{X_{k - 1}} \,|\, {\boldsymbol{R}}_Z^{[k - 1]} \,)$ , 预测GLMB分布为[22]式中
式中, 预测标签集表示成并集形式
$I = {L_{\rm{S}}} \cup {L_{\rm{B}}}$ , 其中${L_{\rm{S}}}$ 表示存活目标的标签集, 等于预测标签集$I$ 与0到$k - 1$ 时刻标签空间的交集, 记作${L_{\rm{S}}} = I \cap {\mathbb{L}_{{\text{0}}:k - 1}}$ ;${L_{\rm{B}}}$ 表示新生目标标签集, 等于预测标签集$I$ 与$k$ 时刻标签空间的交集, 记作${L_{\rm{B}}} = I \cap {\mathbb{L}_k}$ 。预测假设权重$w_{k|k - 1}^{(I)}$ 等于存活假设权重$w_{\rm{S}}^{(I)}(I \cap {\mathbb{L}_{{\text{0}}:k - 1}})$ 与新生假设权重$ w_{\rm{B}}^{}(I \cap {\mathbb{L}_k}) $ 的乘积。对于预测的单目标概率密度$p_{k|k - 1}^{(I)}({{\boldsymbol{x}}_{k,i}})$ , 当${1_{{\mathbb{L}_{0:k - 1}}}}(\ell ) = 1$ , 即预测目标为存活目标时,$p_{k|k - 1}^{(I)}({{\boldsymbol{x}}_{k,i}}) = p_{\rm{S}}^{(I)}({{\boldsymbol{x}}_{k,i}})$ , 当${1_{{\mathbb{L}_k}}}(\ell ) = 1$ , 即预测目标为新生目标时,$p_{k|k - 1}^{(I)}({{\boldsymbol{x}}_{k,i}}) = p_{\rm{B}}^{}({{\boldsymbol{x}}_{k,i}})$ 。${1_L}(\ell )$ 是包含函数, 当$\ell \in L$ 时等于1, 否则为零。存活假设权重和存活单目标概率密度函数表示为
式中, 权重
$w_{\rm S}^{(I)}({L_{\rm S}})$ 是标签空间${\mathbb{L}_{0:k}}$ 任意子集$J$ 中所有包含${L_{\rm S}}$ 的先验权重$w_{k - 1}^{(I)}(J)$ 加权求和;$ {P_{\rm S}}({\boldsymbol{x}}') $ 表示目标$ {\boldsymbol{x}}' $ 的存活概率,$\eta _{\rm S}^{(I)}(\ell ) = \int {{P_{\rm S}}({\boldsymbol{x}}')p_{k - 1}^{(I)}({\boldsymbol{x}}'){\rm d}{\boldsymbol{x}}'}$ 是其归一化因子。当目标存活概率与其状态无关时, 即$ {P_{\rm S}}({\boldsymbol{x}}') \triangleq {P_{\rm S}} $ , 归一化因子等于常数, 写作$ \eta _{\rm S}^{(I)}(\ell ) = {P_{\rm S}} $ , 此时, 式(14)的存活单目标概率密度函数变成标准的Chapman-Kolmogorov预测, 写作$ p_{\rm S}^{(I)} \, ({\boldsymbol{x}},\, \ell ) \,= \int {{f_{k|k - 1}}({\boldsymbol{x}}|{\boldsymbol{x}}') \, p_{k - 1}^{(I)}({\boldsymbol{x}}') \, {\rm d}{\boldsymbol{x}}'} $ 。新生假设权重
$w_{\mathrm{B}}^{}({L_{\mathrm{B}}})$ 和新生单目标概率密度函数$p_{\mathrm{B}}^{}({x_{k,i}})$ 通常需要预先定义, 对于无源声呐应用场景, 新生目标的先验信息很难精确已知, 为解决该问题, 2.4节给出了一种自适应新生目标模型。 -
给定预测GLMB分布和观测
${{\boldsymbol{R}}_{{Z_k}}}$ , 后验GLMB分布表达式如下[22]:式中
式中, 后验权重
$w_k^{(I)}$ 正比于预测权重$w_{k|k - 1}^{(I)}$ , 比例因子$\eta _{{{\boldsymbol{R}}_{{Z_k}}}}(I)$ 的计算需要边缘化所有目标的影响, 后验单目标概率密度函数$\widehat p_k^{(I)}({{\boldsymbol{x}}_{k,i}})$ 的计算需要边缘化除当前目标以外其他所有目标的影响。当各个目标对于观测的影响可以分离时, 多目标似然函数可以写作多个单目标似然函数相乘的形式, 从而多维积分变成多个一维积分相乘, 但是对于阵列观测, 各个目标对于观测的影响不可分离, 因此, 如何求解多维积分成为关键问题。 -
针对多维积分问题, 本节利用CW分布与CIW分布的共轭性质, 通过变量替换可以推导后验GLMB分布的近似解。
-
给定标签集
$I$ , 后验权重的表达式如下:式中,
$\mathcal{C}\mathcal{G}\mathcal{B}_P^{II}({{\boldsymbol{R}}_{{Z_k}}};M,\widehat \rho ,\widehat {\boldsymbol{\varPhi}} )$ 表示复广义Ⅱ型贝塔分布,$\widehat \rho $ 和$\widehat{\boldsymbol{ \varPhi}} $ 分别表示该分布的自由度和尺度矩阵估计值:式中, b是任意的
$P \times 1$ 维非零复向量,${\mathrm{vec}}( \cdot )$ 表示矩阵的向量化,${{\boldsymbol{M}}_{\boldsymbol{Y}}}$ 和${{\boldsymbol{C}}_{\boldsymbol{Y}}}$ 表示为证明: 当标签集
$|I| = 0$ 时, 即目标数等于0, 式(16)的后验权重为当标签集
$|I| > 0$ 时, 即目标数大于0, 式(16)的后验权重为式中,
$ {\boldsymbol{\varGamma}} ({X_k}) $ 是关于多目标状态${X_k}$ 的函数, 如式(8)所示。定义$P \times P$ 维对称正定的复随机矩阵${\boldsymbol{Y}} = {\boldsymbol{\varGamma}} ({X_k})$ , 根据变量替换定理, 式(27)的向量积分可简化成如下的矩阵积分:式中,
$p({\boldsymbol{Y}})$ 是复随机矩阵${\boldsymbol{Y}}$ 的概率密度函数。${\boldsymbol{Y}}$ 的均值和协方差矩阵分别为假设
${\boldsymbol{Y}}$ 服从CIW分布, 记作$ p({\boldsymbol{Y}}) = \mathcal{C}\mathcal{I}{\mathcal{W}_P}({\boldsymbol{Y}};\rho ,{\boldsymbol{\varPhi}} ) $ ,$\rho $ 和${\boldsymbol{Y}}$ 分别是自由度和尺度矩阵。已知${\boldsymbol{Y}}$ 的均值和协方差矩阵, 可以估计CIW分布的自由度和尺度矩阵, 如式(20)和式(21)所示, 具体推导过程见附录A。利用CW分布与CIW分布的共轭性质, 式(28)的积分可简化为 -
给定标签集I, 只有当目标数大于等于1时才存在后验单目标概率密度函数, 因此只考虑目标数等于1和大于1两种情况, 后验单目标概率密度函数表达式如下:
式中,
${\widehat \rho _i}$ 和${\widehat{\boldsymbol{ \varPhi}} _i}$ 分别表示广义Ⅱ型贝塔分布的自由度和尺度矩阵:式中, b是任意的
$P \times 1$ 维非零复向量, 参数${{\boldsymbol{M}}_{{{\boldsymbol{Y}}_i}}}$ 和${{\boldsymbol{C}}_{{{\boldsymbol{Y}}_i}}}$ 表示为证明: 当标签集
$|I| = 1$ 时, 即目标数等于1, 式(17)的后验单目标概率密度函数为当标签集
${\text{|}}I{\text{|}} > 1$ 时, 即目标数大于1, 式(17)的后验单目标概率密度函数为式中,
${{\boldsymbol{\varGamma}} _i}({X_k})$ 是关于多目标状态${X_k}$ 的函数, 表示为定义
$ P \times P $ 维对称正定的复随机矩阵$ {{\boldsymbol Y}_i} = {{\boldsymbol \varGamma} _i}({X_k}) $ ,$ {{\boldsymbol Y}_i} $ 的均值和协方差矩阵分别为假设
${{\boldsymbol{Y}}_i}$ 服从CIW分布, 记作$ p({{\boldsymbol{Y}}_i}) = \mathcal{C}\mathcal{I}\mathcal{W}({{\boldsymbol{Y}}_i};{\rho _i}, {{\boldsymbol{\varPhi}} _i}) $ 。已知${{\boldsymbol{Y}}_i}$ 的均值和协方差矩阵, 可估计CIW分布的自由度和尺度矩阵, 如式(33)和式(34)所示。同理, 式(38)的积分可简化为至此, 推导了后验GLMB分布近似解表达式, 消除了多维积分运算。
-
本节给出基于粒子滤波的数值计算实现方法, 实现流程如表1所示。给定当前时刻的先验GLMB分布, 写作
$ {\pi _{k - 1}} = {\{ w_{k - 1}^{(I')},{[p_{k - 1}^{(I')}]_{\ell \in I'}}\} _{I' \in \mathcal{F}\left( {{\mathbb{L}_{0:k - 1}}} \right)}} $ , 其中, 单目标概率密度函数使用J个加权粒子集表示,$\widetilde {\boldsymbol{x}}_{k - 1}^{(j)}$ 表示粒子采样,$ \omega _{k - 1}^{(j)} $ 表示粒子权重, 如下所示:预测过程如表1的1~11行所示, 预测标签集
$ I $ 是存活标签集与新生标签集的并集, 写作$ I = {L_{\text{S}}} \cup {L_{\text{B}}} $ 。给定前一时刻标签集合$ I' $ , 最多可衍生出$ {2^{|I'|}} $ 个存活假设, 以两个目标为例$ I' = \{ {\ell _1},{\ell _2}\} $ , 可以衍生出4个存活假设, 对应的标签集分别是: 1) 无目标存活$ L_{\text{S}}^{(1)} = \emptyset $ ; 2) 标签为$ {\ell _1} $ 的目标存活$ L_{\text{S}}^{(2)} = \{ {\ell _1}\} $ ; 3) 标签为$ {\ell _2} $ 的目标存活$ L_{\text{S}}^{(3)} = \{ {\ell _2}\} $ ; 4) 两个目标均存活$ L_{\text{S}}^{(4)} = \{ {\ell _1},{\ell _2}\} $ 。预测过程会导致存活假设的数量呈指数增长, 为减轻运算量, 可以采用K最短路径方法[20]保留其中KS个权重较大的存活假设。新生目标模型为
$ {\pi _{\mathrm{B}}} = \{ {r_{{\mathrm{B}},i}},{p_{{\mathrm{B}},i}}\} _{i = 1}^{{n_{\mathrm{B}}}} $ ,$ {n_{\mathrm{B}}} $ 为新生目标个数,$ {r_{{\mathrm{B}},i}} $ 为目标新生概率,$ {p_{{\mathrm{B}},i}}(\widetilde {\boldsymbol{x}}) $ 为新生目标概率密度函数。采用文献[27]的最大似然方法构造新生目标模型, 给定当前时刻的阵列观测$ {{\boldsymbol{R}}_{{Z_k}}} $ , 扫描方位空间得到各个方位的入射信号功率估计, 扫描间隔为$0.5\text{°}$ , 表达式如下:式中,
${\boldsymbol{\varSigma }}$ 是关于前一时刻多目标状态估计${\widehat X_{k - 1}}$ 的函数, 写作${\boldsymbol{\varSigma }} \,=\, {\boldsymbol{ \varGamma}} ({\widehat X_{k - 1}}) \,=\, \sigma _v^2{{\boldsymbol{I}}_P} \,+\, \sum\nolimits_{{x_{k - 1}} \in {{\widehat X}_{k - 1}}} {\sigma _{k - 1}^2{\boldsymbol{a}}({\theta _{k - 1}}){{\boldsymbol{a}}^{\rm{H}}}({\theta _{k - 1}})} $ 。挑选入射信号功率大于门限$ \sigma _{}^2 > \sigma _{{\text{threshold}}}^2 $ 的峰值,$ \{ {\theta _{{\text{peak}},i}},\sigma _{{\text{peak}},i}^2\} _{i = 1}^{{n_B}} $ 分别是峰值处的方位及对应的信号功率, 利用高斯分布采样新生粒子, 记作$ {p_{{\mathrm{B}},i}}(\widetilde {\boldsymbol{x}}) = \mathcal{N}(\widetilde {\boldsymbol{x}};{{\boldsymbol{m}}_{{\rm{B}},i}},{{\boldsymbol{P}}_{\rm{B}}}) $ , 均值为$ {{\boldsymbol{m}}_{{\rm{B}},i}} = [{\theta _{{\text{peak}},i}},0,\sigma _{{\text{peak}},i}^2] $ , 方差为$ {{\boldsymbol{P}}_{\rm{B}}} $ 。新生过程最多可衍生出$ {2^{{n_{\rm{B}}}}} $ 个新生假设, 为减轻运算量, 也可以采用K最短路径方法保留其中KB个权重较大的新生假设。更新过程如表1的12~23行所示, 给定后验标签集
$ I $ , 后验权重分成两种情况进行计算, 分别是目标数等于0和大于等于1。当目标数等于0时, 可以直接求出后验权重。当目标数大于等于1时, 根据式(24)和式(25), 每个单目标$ {\ell _i} \in I $ 的${{\boldsymbol{M}}_i}$ 和${{\boldsymbol{C}}_i}$ 分别为根据式(22)和式(23), 可以计算出参数
$ \boldsymbol{M_Y} $ 和$ \boldsymbol{C_Y} $ , 从而估计出自由度和尺度矩阵, 得到后验权重。后验单目标概率密度函数的粒子集分两种情况进行计算, 分别是目标数等于1和大于1。当目标数等于1时, 可以直接求出粒子的后验权重。当目标数大于1时, 根据式(35)和式(36), 每个粒子对应的
$ {\boldsymbol{M}}_{{{\boldsymbol{Y}}_i}}^{(j)} $ 和${{\boldsymbol{C}}_{{{\boldsymbol{Y}}_i}}}$ 分别为根据式(33)和式(34), 可以计算出每个粒子的自由度和尺度矩阵估计值, 用于更新粒子权重。根据更新粒子权重
$ \omega _k^{(j)} $ 重采样, 得到归一化权重的后验单目标状态粒子集$p_k^{(I)}(\widetilde {\boldsymbol{x}}) = \{ 1/J,\widetilde {\boldsymbol{x}}_k^{(j)}\} _{j = 1}^J$ , 进而得到单目标状态估计,${\widehat {\boldsymbol{x}}_k} = \sum\nolimits_{j = 1}^J {\widetilde {\boldsymbol{x}}_k^{(j)}} /J$ 。多目标轨迹提取过程如下, 首先估计目标数:然后遍历所有目标数等于
$ \widehat n $ 的后验假设, 寻找权重最大的假设, 提取对应的标签集合和多目标状态。 -
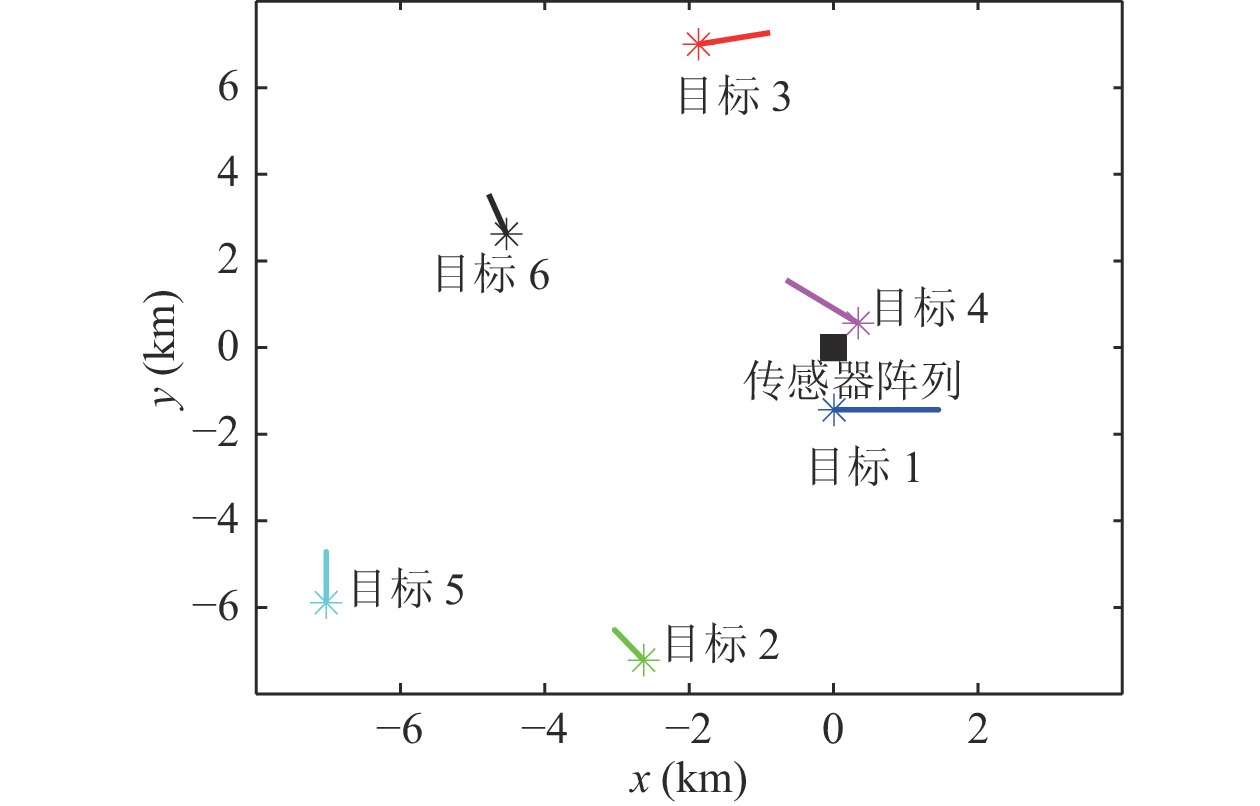
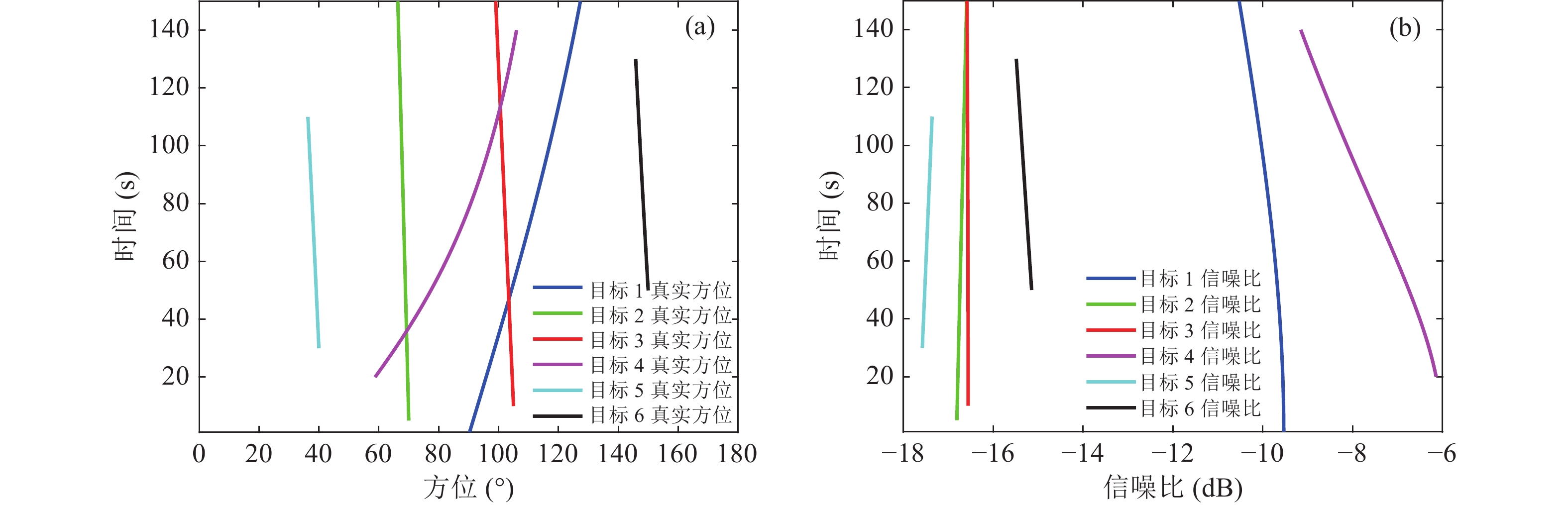
仿真场景如图3所示, 水听器阵列是16个阵元组成的均匀直线阵, 阵元间距满足半波长, 位于坐标原点, 由符号“■”表示, 总观测时间长度为150 s, 监视区域内有6个目标在不同时刻以及不同位置出现, 假设所有目标均做匀速直线运动, 符号“*”表示目标初始位置, 各个目标的初始状态、运动参数以及出现与消失时刻见表2。图4(a)是目标方位随时间变化曲线, 假设各向同性的环境噪声场, 环境噪声级和目标辐射噪声的声源级在观测时间保持不变, 传播损失服从柱面波扩展衰减
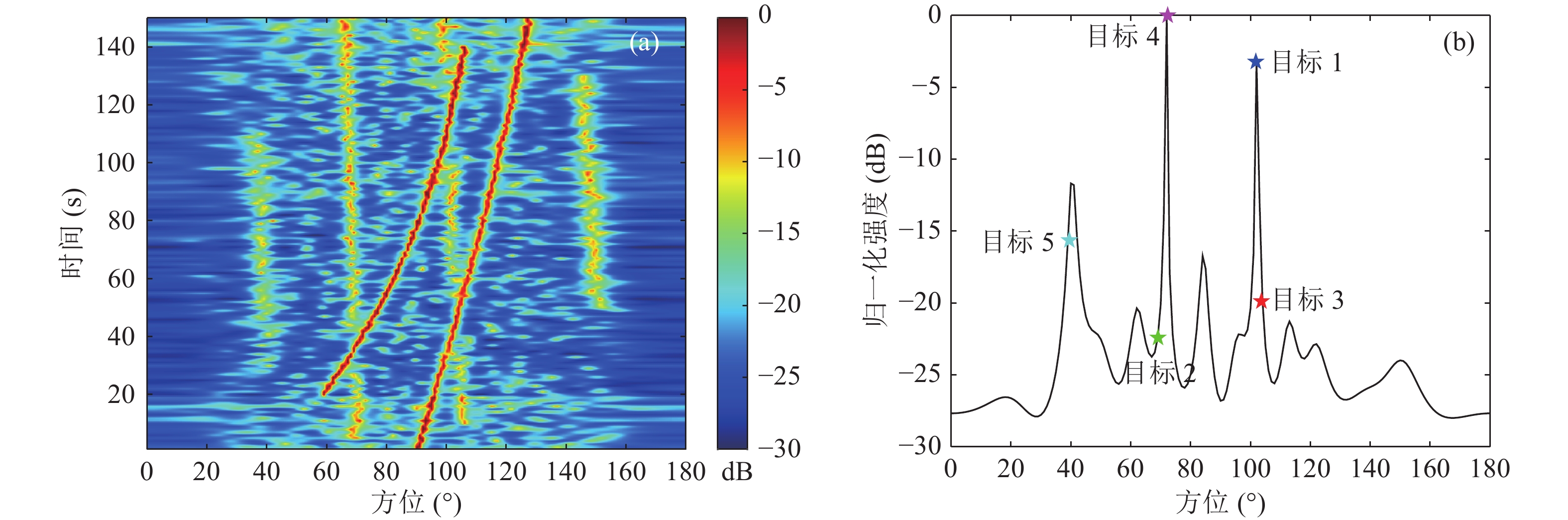
$ {\text{PL}} = 10\lg r $ ,$ r $ 是目标与阵列之间的距离, 图4(b)为信噪比随时间变化曲线, 假设环境噪声功率已知,$ \sigma _v^2 = 5 $ , 入射信号功率为$ {\sigma ^2} = 10^{{\rm SNR}/10} \sigma _v^2 $ 。30~55 s时间段内, 有2组目标方位历程交叉, 110~130 s内, 有1组目标方位历程交叉, 且目标1与目标4距离阵列较近, 入射信号功率较强, 目标2与目标3距离阵列较远, 入射信号功率较弱, 强弱目标信噪比相差最大可达10 dB。设置每帧的时间周期为1 s, 每帧有效快拍数为100, 图5(a)为SBL方法得到的方位历程图, 扫描间隔为
$0.5\text{°}$ , 按dB量化。在方位历程交叉区间内, 目标1与目标4的入射信号功率较强, 方位轨迹十分明显, 几乎掩盖了目标2与目标3, 仅能凭借人眼视觉累积大致估计各个目标的方位轨迹。图5(b)为第40秒的SBL空间谱切片, 由于SBL算法分辨率限制, 当2个目标方位邻近时仅出现1个峰值, 若采用峰值检测方法会丢失其中1个目标信息。 -
对于检测后跟踪方法, 单目标运动状态定义为
$ {\widetilde {\boldsymbol x}_k} = {[{\theta _k},{\dot \theta _k}]^{\rm T}} $ , 其中$ {\theta _k} $ 表示目标方位,$ {\dot \theta _k} $ 表示其方位变化率, 状态转移方程采用常速度运动模型:式中,
$ \Delta T = 1{\text{ s}} $ 是一帧的时间周期,$ {\varepsilon _{\ddot \theta }} $ 是方位加速度的高斯噪声, 标准差设置为$ 0.03~(\text{°})/{{\text{s}}^2} $ 。观测输入是每帧SBL空间谱切片的方位检测结果, 表示成有限集合形式$ {\varTheta _k} = [{\hat \theta } _{k,1}, \cdots ,{\hat \theta } _{k,m}] $ , 检测门限设置为$ - 20{\text{ dB}} $ , 观测方程为式中,
$ {\boldsymbol H} = [ 1~~0 ]^{\text{T}} $ ,$ {v_k} \sim \mathcal{N}(0,\sigma _v^2) $ 是观测高斯噪声, 标准差设置为$ {\sigma _v} = 2{\text{°}} $ 。分别采用联合概率数据关联(JPDA)滤波器[28]和标准GLMB滤波器[20]对方位检测结果进行处理, JPDA滤波器需要精确已知6个目标的出现与消失时刻。标准GLMB滤波器的参数设置如下: 目标存活概率
$ {P_{\text{S}}} = 0.99 $ , 新生目标模型由当前时刻方位检测结果$ {\varTheta _k} $ 决定, 满足$ {\pi _{\mathrm{B}}} = \{ r_{\mathrm{B}}^{(i)},p_{\mathrm{B}}^{(i)}\} _{i = 1}^m $ ,$ m = |{\varTheta _k}| $ 是方位峰值数量, 目标新生概率$ r_{\mathrm{B}}^{(i)} = 0.001 $ , 新生目标状态分布满足$ p_{\mathrm{B}}^{(i)}(\widetilde {\boldsymbol{x}}) = \mathcal{N}(\widetilde {\boldsymbol{x}};{\boldsymbol{m}}_{\mathrm{B}}^{(i)},{\boldsymbol{P}}_{\mathrm{B}}^{}) $ , 均值$ {\boldsymbol{m}}_{\mathrm{B}}^{(i)} = {[{\theta _{k,i}},0]^{\mathrm{T}}} $ , 方差$ {{\boldsymbol{P}}_{\mathrm{B}}} = {\text{diag}}{([3,0.3])^2} $ 。每个目标分配的粒子数300, 检测概率$ {P_{\text{D}}} = 0.9 $ , 平均虚警数设置为$ 3 $ 。图6为检测后跟踪方法的多目标方位跟踪结果, 黑色实线是方位真值, 灰色 × 是方位检测结果, 对应观测输入, 不同颜色的点迹表示不同目标的方位轨迹。在方位历程交叉时, GLMB滤波器判断弱目标消失, 交叉过后判断新目标出现, 点迹颜色发生变化说明轨迹标签发生变化, 不属于同一个目标。JPDA滤波器由于精确已知目标出现与消失时刻, 因此未出现轨迹中断, 但是在方位历程交叉区域, 错误的数据关联导致目标1~4方位轨迹与真值不同, 说明出现了误跟。
-
分别采用PF-TBD滤波器[9,10]、MB-TBD滤波器[18]、本文所提GLMB-TBD滤波器对阵列数据进行处理, PF-TBD滤波器的状态转移方程与式(50)相同, 不能估计信号功率, 同时需要精确已知6个目标的出现与消失时刻。
MB-TBD和GLMB-TBD滤波器的状态转移方程如下, k时刻单目标运动状态定义为
$ {\widetilde {\boldsymbol{x}}_k} = {[{\theta _k},{\dot \theta _k},\sigma _k^2]^{\rm T}} $ , 状态转移方程采用常速度运动模型:式中,
$ {\varepsilon _{{\sigma ^2}}} $ 是信号功率的高斯噪声, 标准差与前一时刻的信号功率相关, 即$ {\varepsilon _{{\sigma ^2}}} = 0.1\sigma _{k - 1}^2 $ 。观测输入是阵列数据协方差矩阵${{\boldsymbol{R}}_{{Z_k}}}$ , 观测方程如式(6)所示。滤波器的参数设置如下: 存活概率
$ {P_{\rm S}} = 0.99 $ , 存活假设数量$ {K_{\text{S}}} = 50 $ , 新生目标模型由当前时刻阵列数据协方差矩阵${{\boldsymbol R}_{{Z_k}}}$ 决定, 满足$ {\pi _{\mathrm{B}}} = \{ r_{\mathrm{B}}^{(i)},p_{\mathrm{B}}^{(i)}\} _{i = 1}^m $ ,$ m $ 是信号功率峰值大于门限$ \sigma _{{\text{threshold}}}^2 = 0.01 $ 的数量, 即$ {\mathrm{SNR}} > - 27\;{\mathrm{dB}} $ 的数量, 目标新生概率为$ r_{\mathrm{B}}^{(i)} = 0.001 $ , 新生目标状态分布满足$ p_{\mathrm{B}}^{(i)}(\widetilde {\boldsymbol{x}}) = \mathcal{N}(\widetilde {\boldsymbol{x}};{\boldsymbol{m}}_{\mathrm{B}}^{(i)},{\boldsymbol{P}}_B^{}) $ ,$ {{\boldsymbol{m}}_{{\mathrm{B}},i}} = [{\theta _{{\text{peak}},i}},0,\sigma _{{\text{peak}},i}^2]_{i = 1}^{{n_{\mathrm{B}}}} $ , 方差$ {{\boldsymbol{P}}_{\mathrm{B}}} = {\text{diag}}{([3,0.3,0.1])^2} $ , 新生假设数量$ {K_{\text{B}}} = 50 $ , 每个目标分配的粒子数为300。图7为检测前跟踪方法的多目标方位跟踪结果。由于PF-TBD滤波器已知目标的出现与消失时刻, 因此未出现轨迹中断现象, 如图7(a)所示, 但弱目标方位出现了误跟, 原因是该滤波器根据波束能量计算每个目标状态粒子的似然函数, 当方位历程交叉时, 目标1和目标4方位的波束能量更强, 粒子的似然程度更高, 导致弱目标的方位轨迹偏向强目标, 直至完全重合。图7(b)和图8(a)分别为MB-TBD滤波器方位跟踪与信噪比跟踪结果, 该方法一定程度上解决了方位历程交叉下的连续跟踪问题, 但是在部分时刻错误估计目标数量, 原因是该方法递归过程中仅保留了多目标后验分布的一阶矩信息, 跟踪性能表现不佳。与之相比, GLMB-TBD滤波器递归过程中保留了一阶矩和目标数分布信息, 目标数估计更加准确, 不仅可以准确检测目标出现与消失, 而且能够精确且稳定地输出各个方位轨迹, 如图7(c)所示; 同时也能跟踪各个目标信噪比变化, 如图8(b)所示, 较好地解决了强弱目标方位历程交叉场景下的连续跟踪问题。
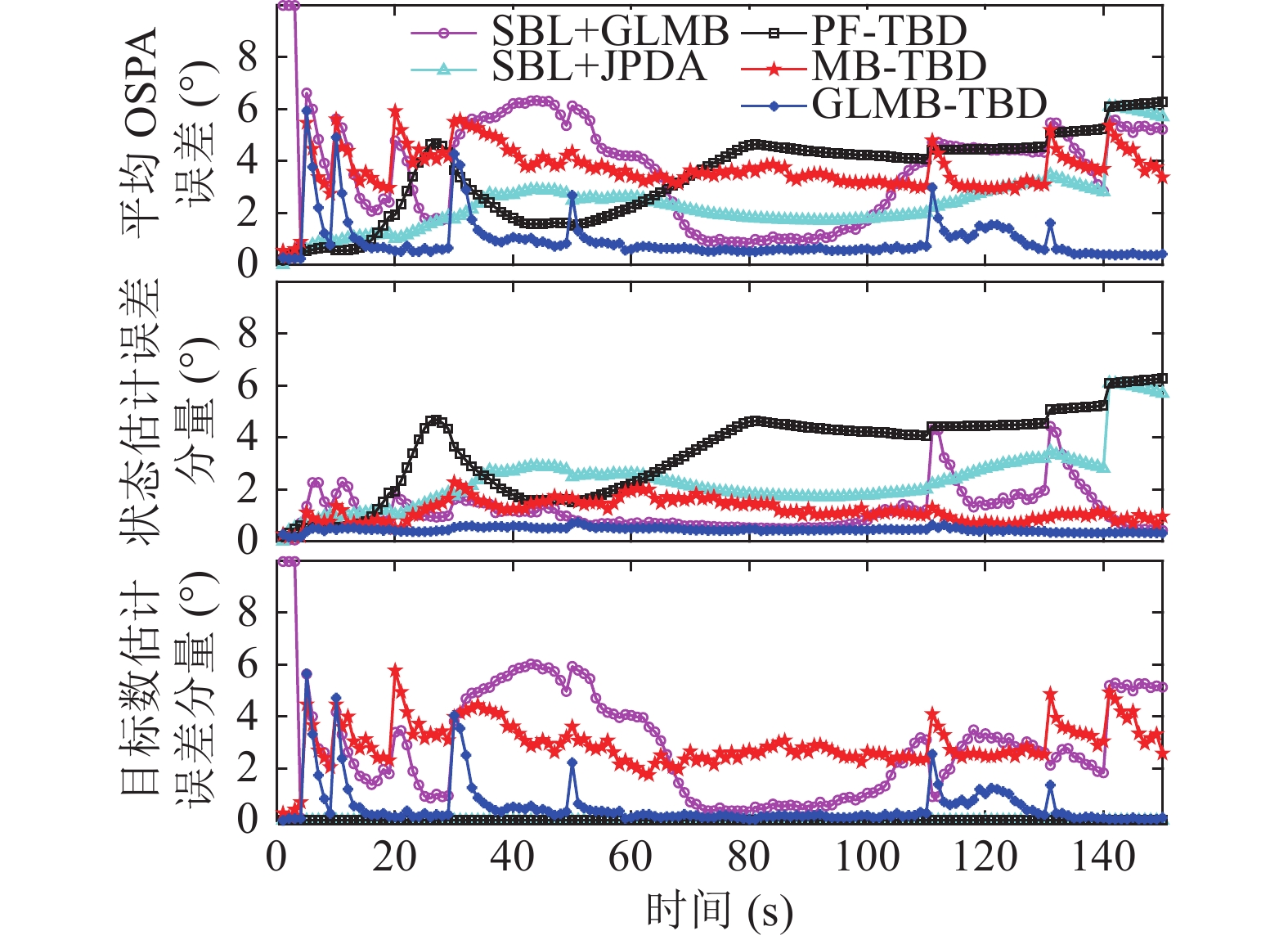
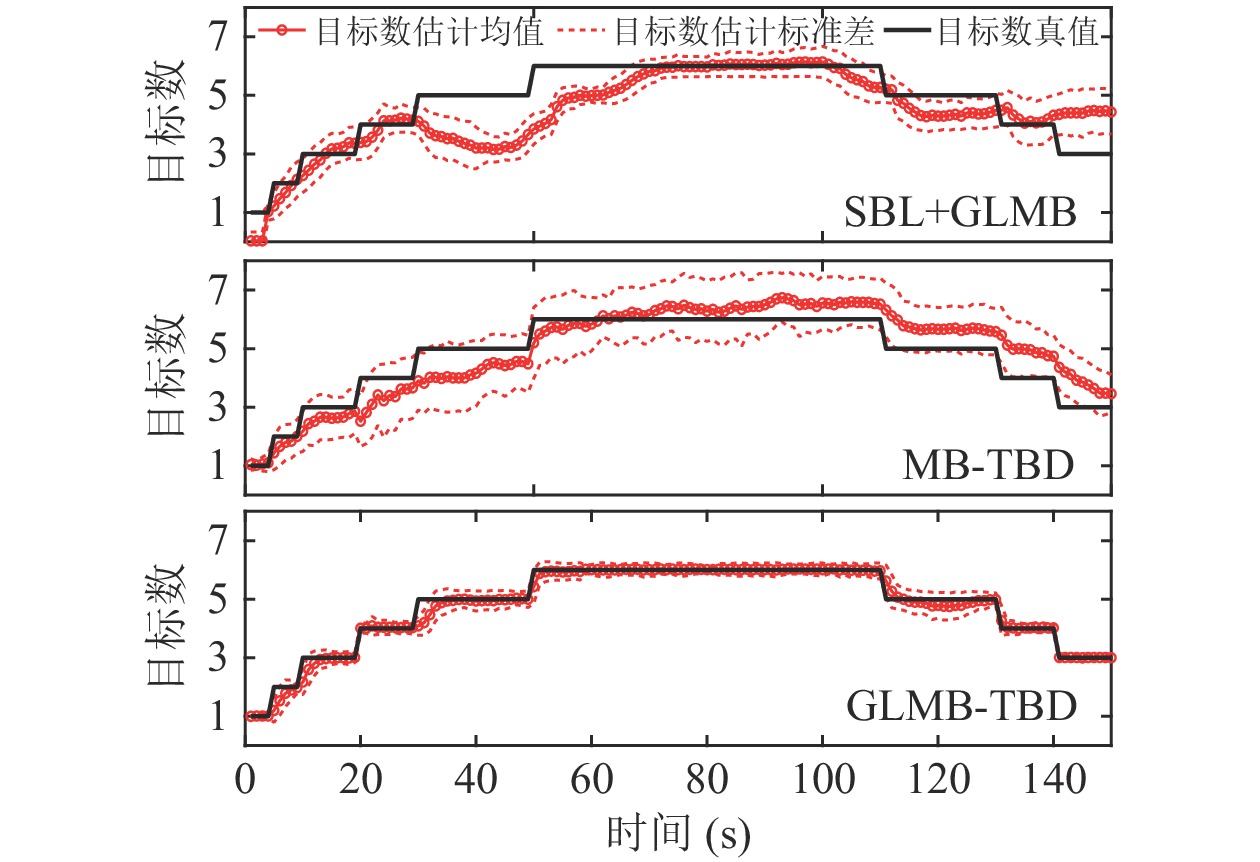
下面通过100次独立的蒙特卡罗实验验证各个方法的统计性能, 性能评价指标采用最优子模式分配(OSPA)误差准则[29], 该误差由状态估计误差分量和目标数估计误差分量构成, 设置截断参数等于10°, 阶数等于2。图9为平均OSPA误差随时间变化曲线, SBL+GLMB滤波器在方位历程交叉区间, 轨迹中断导致目标数估计误差分量迅速上升; SBL+JPDA和PF-TBD滤波器精确已知目标数, 目标数估计误差分量等于零, 但是误跟导致方位历程交叉后状态估计误差分量迅速上升。MB-TBD滤波器的目标估计误差分量维持在较高水平, 说明目标数估计性能不佳; 而GLMB-TBD滤波器的目标数估计误差分量仅在目标出现和消失时刻剧烈增大, 随后快速收敛至较低水平, 说明能够较好地处理目标数变化带来的不确定性影响, 并且在跟踪稳定时状态估计误差分量维持在1°附近, 状态估计精度远远优于其他滤波器。图10为SBL+GLMB、MB-TBD和GLMB-TBD滤波器的目标数估计统计结果随时间变化曲线, 红色○是目标数估计均值, 虚线是目标数估计标准差, 黑色实线是目标数真值。GLMB-TBD滤波器的目标数估计结果更加准确, 标准差更小。
-
在实际应用场景中, 目标辐射噪声的声源级与其方位、航行速度、机动方式等多种因素有关[30], 很难保持稳定不变, 导致入射信号功率可能发生突变。为了验证信噪比突变对所提算法的影响, 仿真场景中假设目标3在第36秒信噪比突然增加6 dB, 目标6在第100秒信噪比突然降低6 dB。图11为GLMB-TBD滤波器的多目标跟踪结果, 信噪比突降时滤波器判定目标3消失, 随后判定新目标出现, 两个目标轨迹颜色不同, 标签发生变化, 说明不是同一个目标。信噪比突增时滤波器判定新目标出现, 新目标方位与目标6方位基本重合, 两个目标的入射信号功率之和接近真值。信噪比突变情况下检测前跟踪方法会错误判断目标出现与消失, 此时需要借助频谱等特征保证跟踪轨迹的连续性。
-
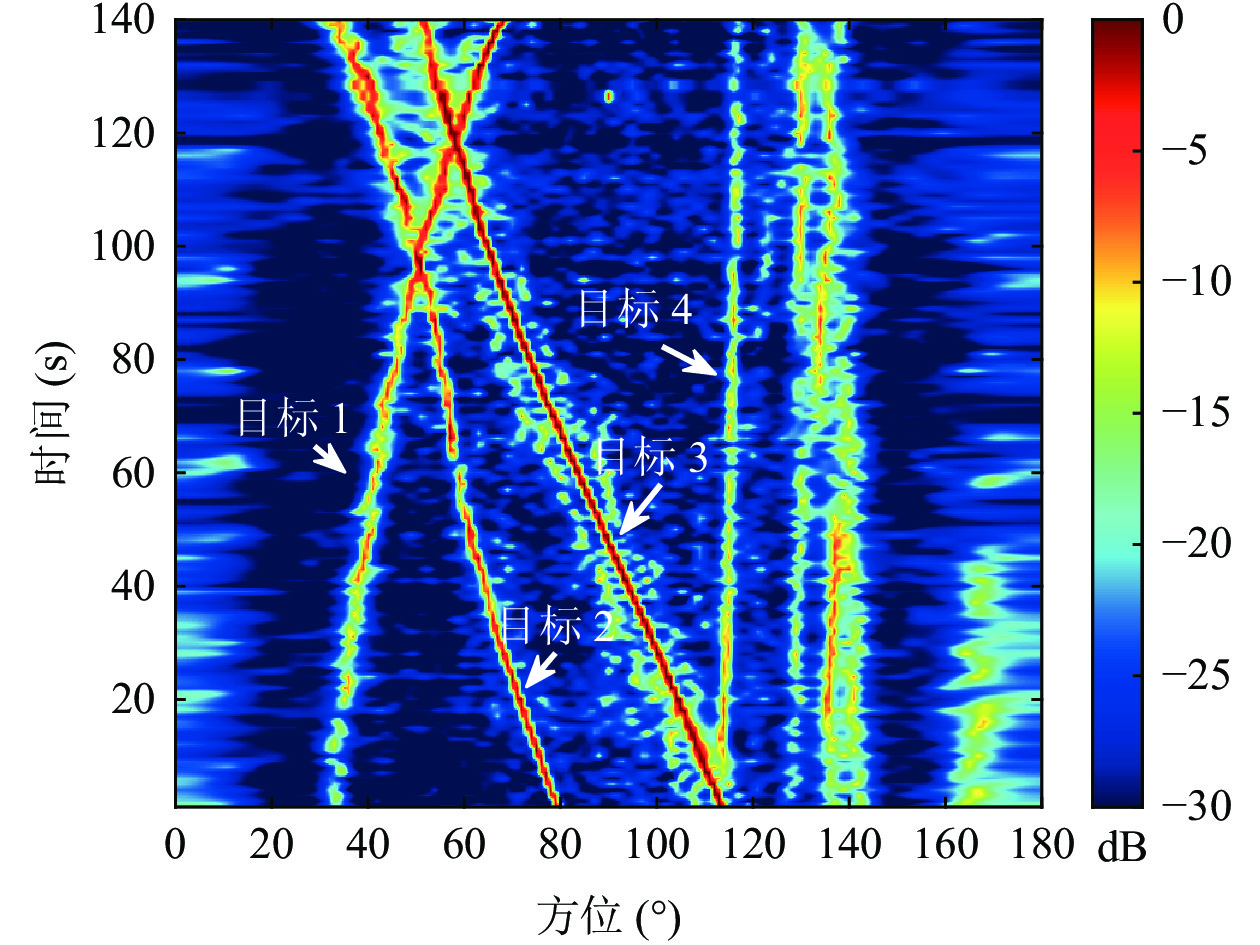
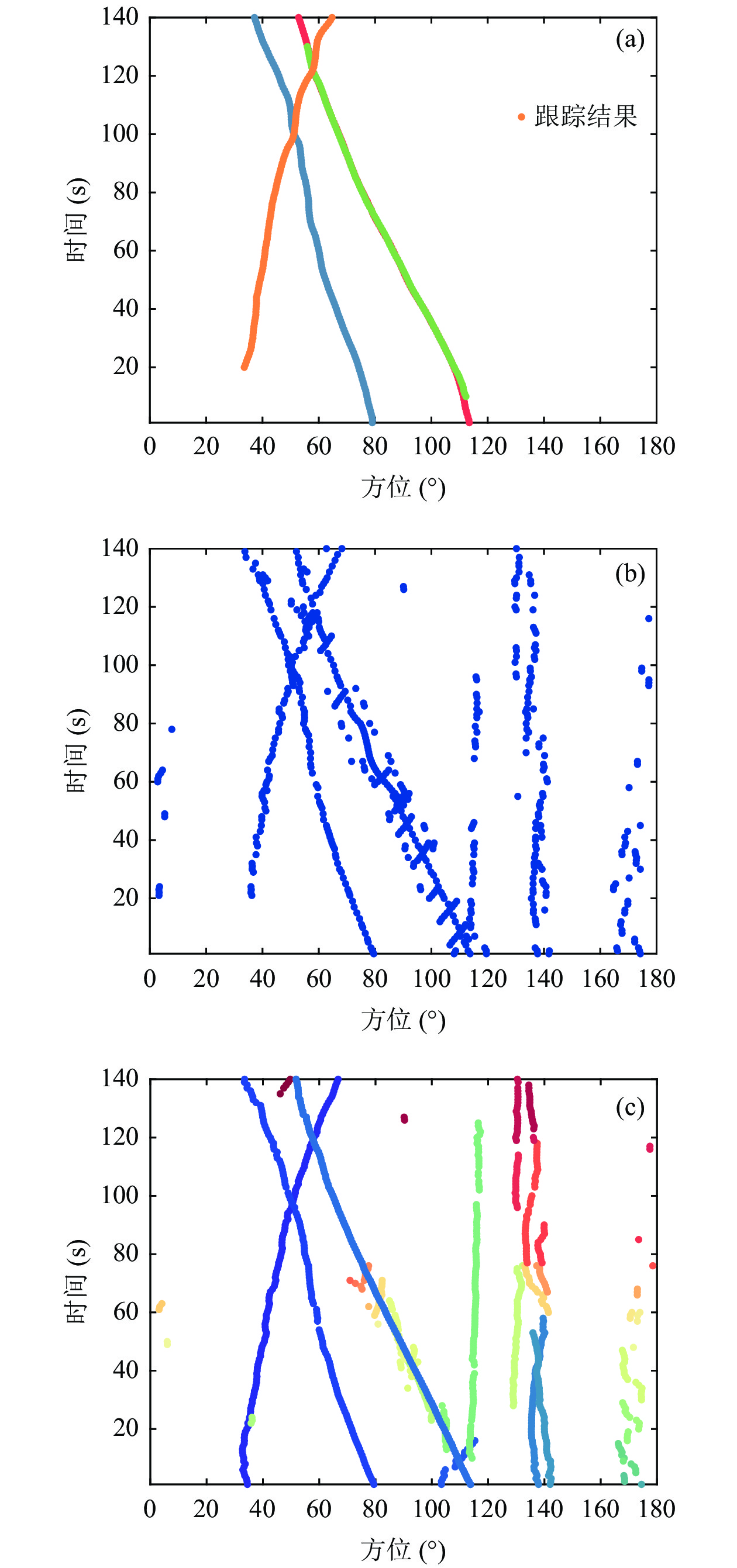
2017年在中国近海某海域进行了试验, 海底布放32元水听器构成的均匀线阵, 阵元间距2 m, 处理的子频带中心频率为400 Hz, 分析数据长度为140 s, 每帧时间周期为1 s, 每帧的有效快拍数为200, 环境噪声功率已知,
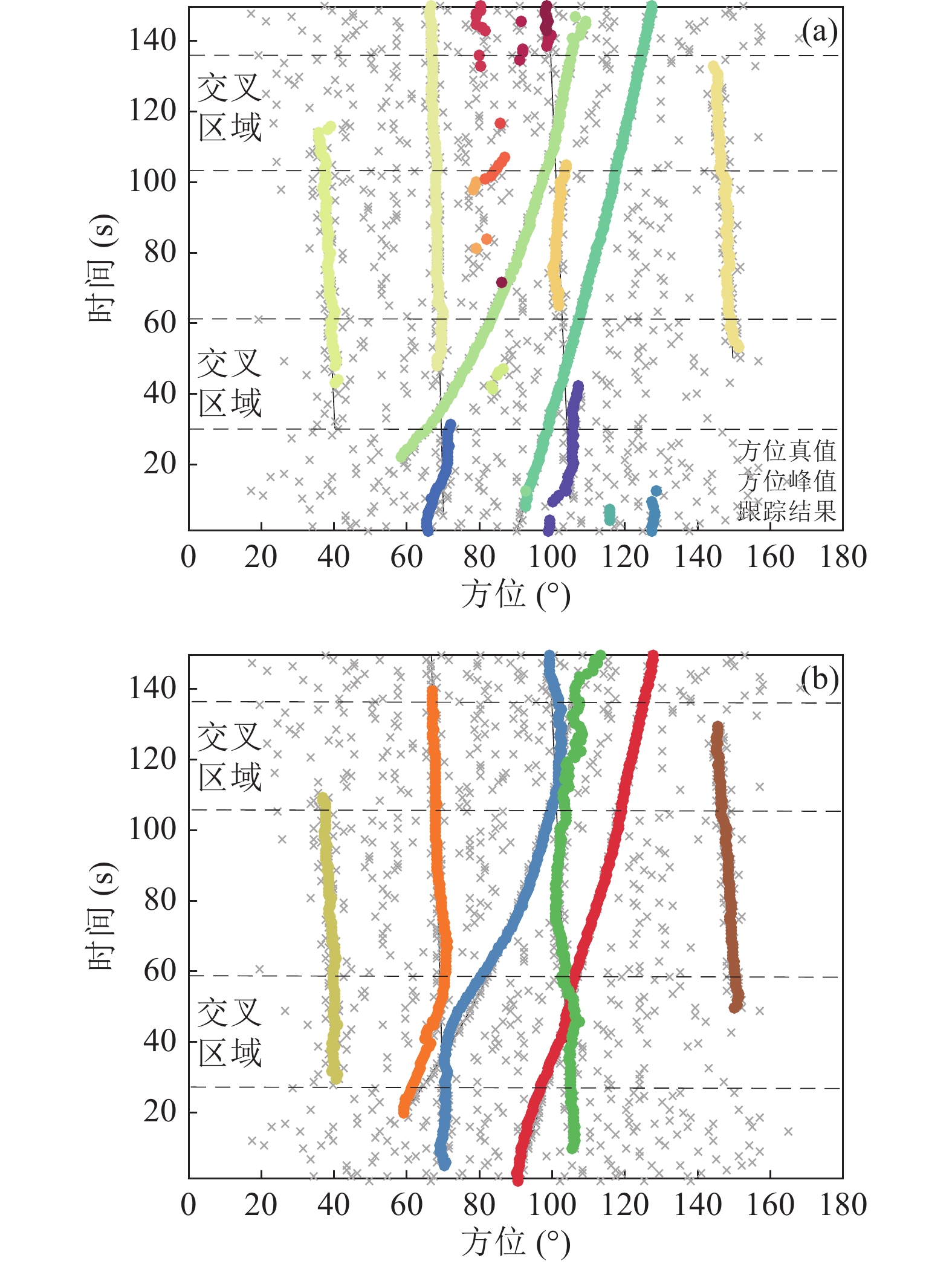
$ \sigma _v^2 = 5 $ 。场景中目标数量众多, 各个目标入射信号功率不同, 目标类型和方位真值未知。图12为SBL方法的方位历程图, 可以观测到4条较为清晰完整的方位轨迹, 目标1方位从32°缓慢移动到65°, 目标2方位从80°缓慢移动到40°, 目标3方位从110°缓慢移动到55°, 目标4方位一直保持在115°附近。此外, 140°方位有至少3个弱目标出现, 160°方位有1个弱目标出现, 方位轨迹较为模糊。检测后跟踪方法的状态空间模型与3.2节相同, SBL空间谱峰值检测门限为
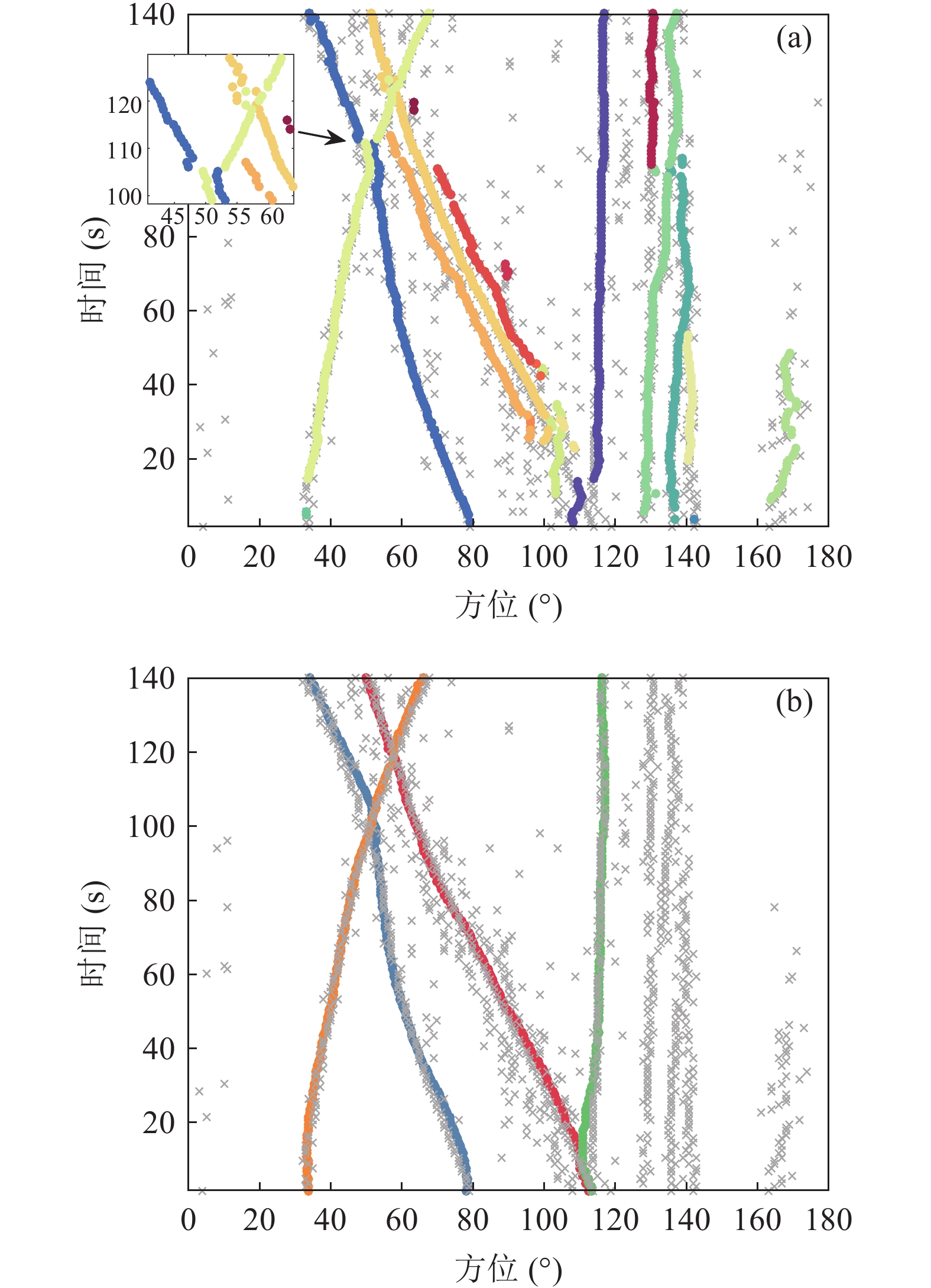
$ - 20{\text{ dB}} $ , JPDA滤波器精确已知4个目标的出现与消失时刻, 标准GLMB滤波器的存活与新生模型参数设置与3.2节相同, 检测概率设置为$ {P_{\text{D}}} = 0.9 $ , 每帧的平均虚警数设置为$ 1 $ 。图13为检测后跟踪方法的多目标方位跟踪结果, 检测后跟踪方法均能给出4个目标连续的方位轨迹。SBL+GLMB滤波器能够检测到140°的3个目标以及160°的目标, 但是在方位历程交叉时目标1与目标2的方位轨迹出现一定偏差; SBL+JPDA滤波器在目标数精确已知的条件下, 能够较好给出4个目标的方位轨迹, 但不具备新生目标检测能力, 无法给出场景中其他目标的方位轨迹。检测前跟踪方法的状态空间模型与3.3节相同, 新生目标模型由当前时刻阵列数据协方差矩阵
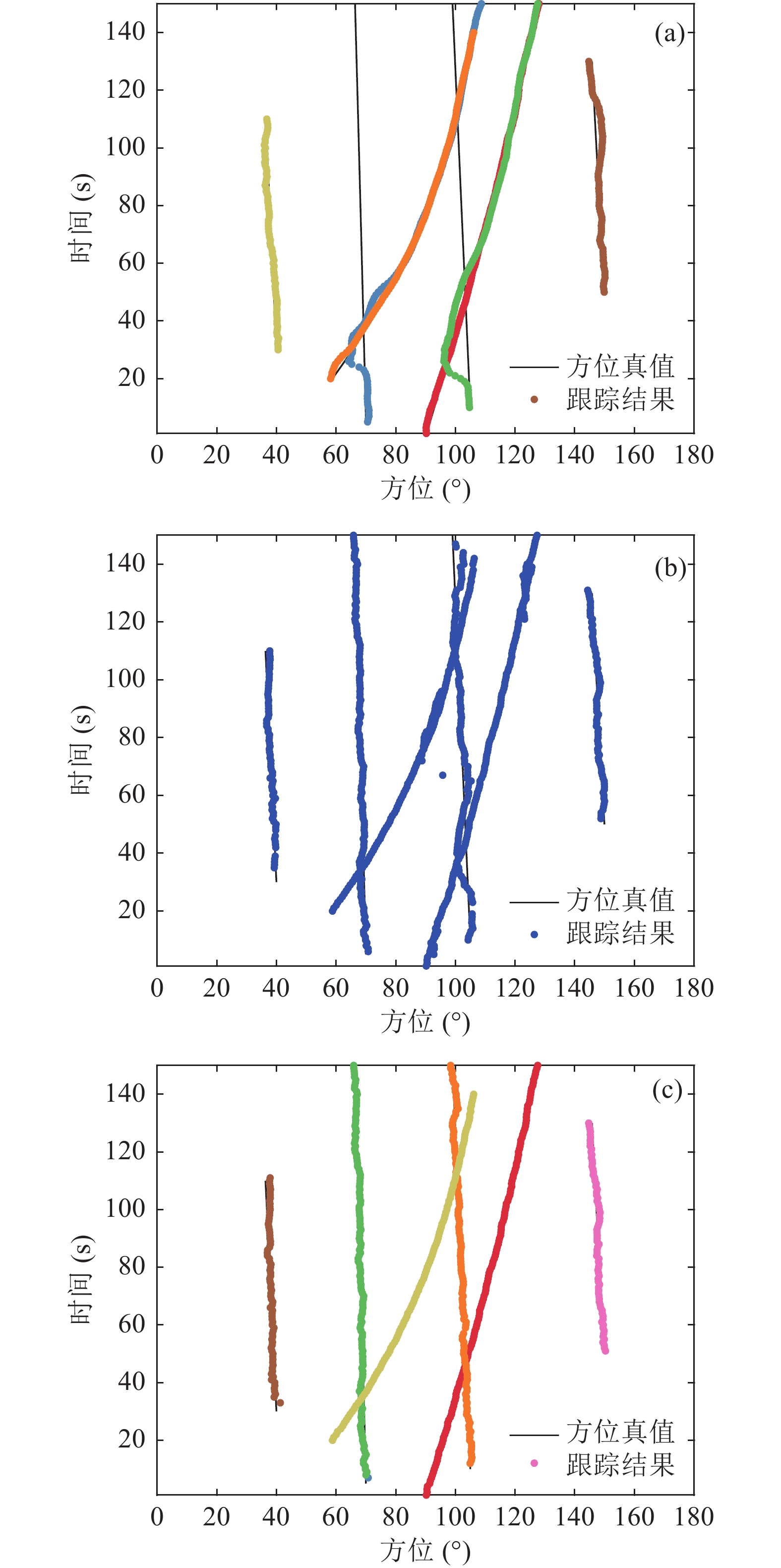
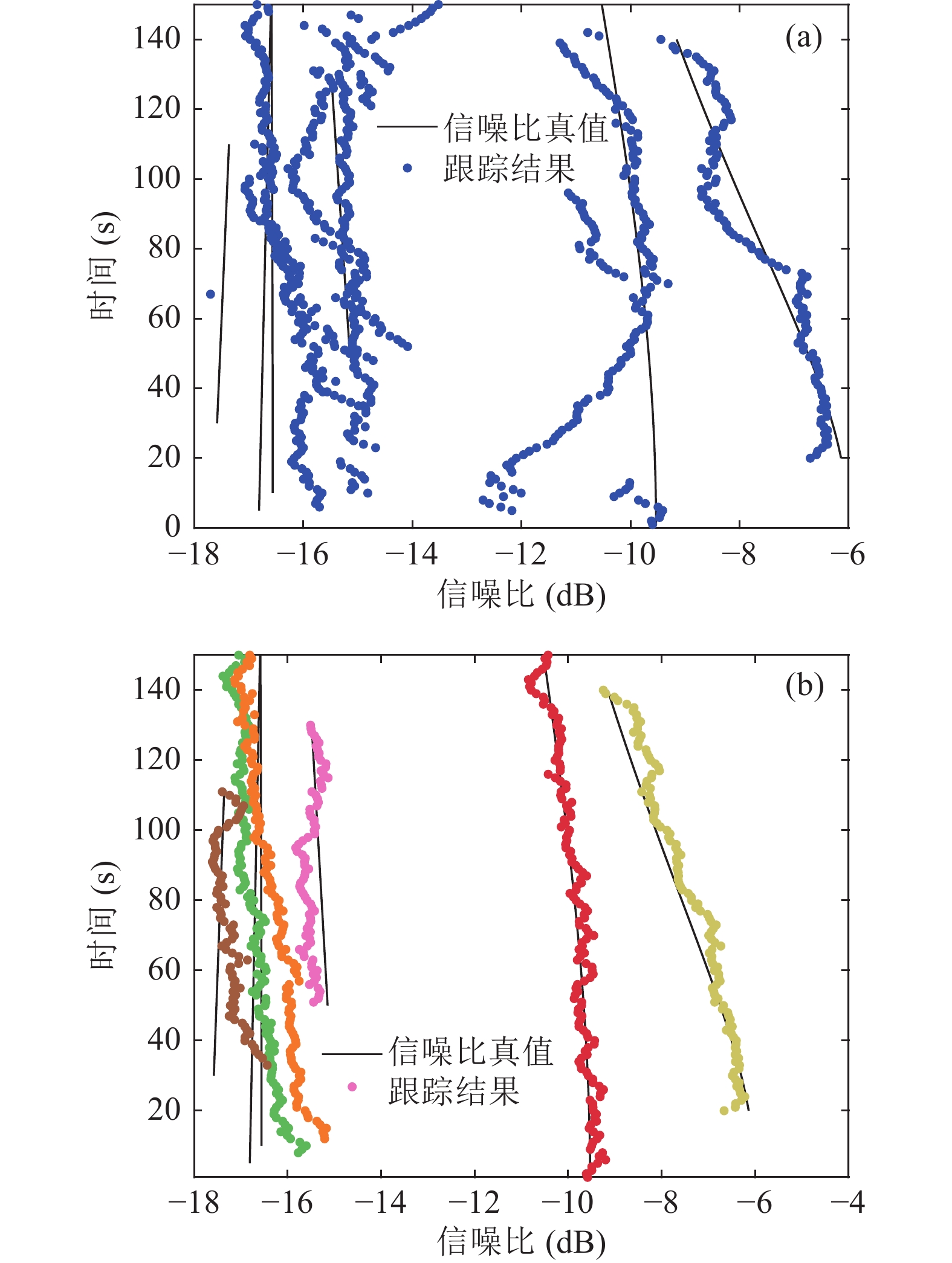
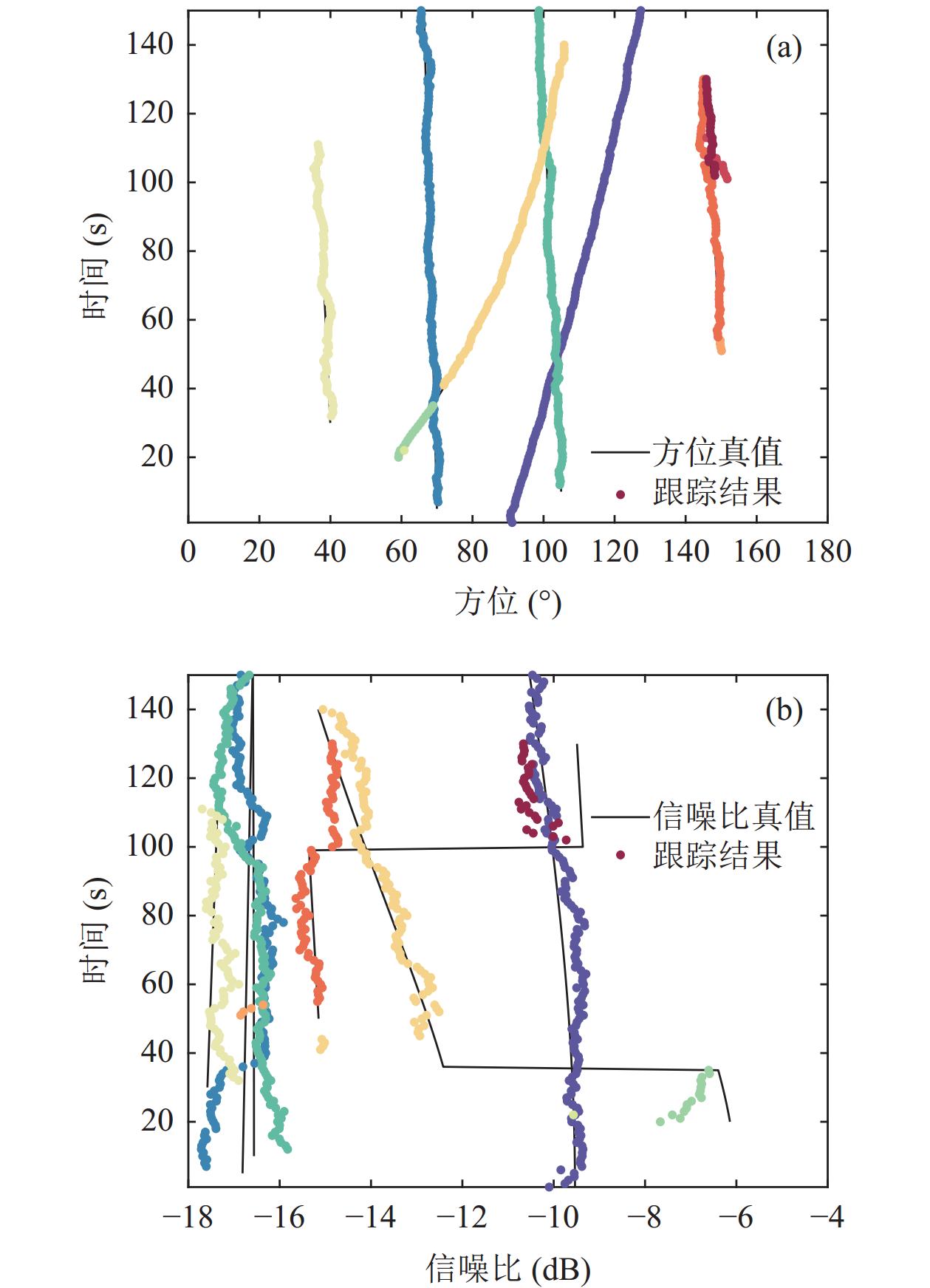
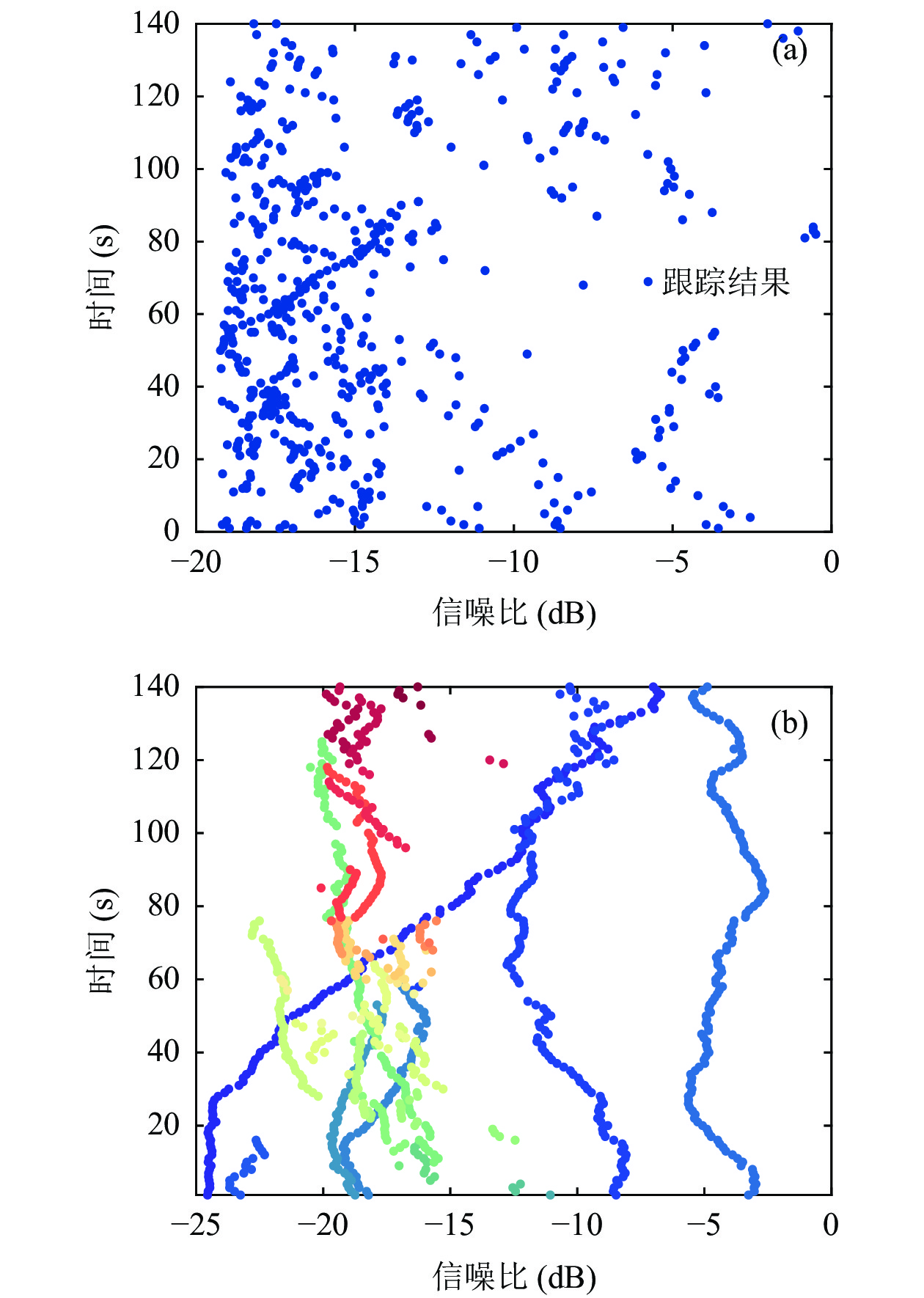
${{\boldsymbol{R}}_{{Z_k}}}$ 决定, 信号功率峰值检测门限设置为$ \sigma _{{\text{threshold}}}^2 = 0.01 $ 的数量, 即$ {\mathrm{SNR}} > - 27\;{\mathrm{dB}} $ 。图14为检测前跟踪方法的多目标方位跟踪结果, PF-TBD滤波器在目标数精确已知的条件下, 目标4出现了误跟, 其方位轨迹与目标3完全重合。MB-TBD滤波器在第120秒轨迹交叉时目标1出现漏检, 跟踪效果不佳。GLMB-TBD滤波器不仅能连续、稳定地输出4个目标的方位轨迹, 在方位历程交叉区域仍具备较好的跟踪稳定性和连续性, 而且能够检测到140°方位的3个目标以及160°方位的目标, 并给出较为连续的方位轨迹。图15(b)为多目标信噪比跟踪结果, 目标1信噪比从−25 dB一直上升至−7 dB左右; 目标2初始信噪比约为−8 dB, 从第30秒开始下降, 随后上升至−10 dB左右; 目标3的信噪比维持在−5 dB附近; 目标4初始信噪比约为−15 dB, 随后下降至−20 dB直至消失; 140°方位的3个目标信噪比均在−20 dB附近。 -
针对方位历程交叉场景下多目标检测与跟踪问题, 提出一种基于广义标签多伯努利滤波的多目标检测前跟踪方法, 该方法直接将阵列数据协方差矩阵作为输入, 融合了航迹新生、消亡及演变等模型, 实现了联合多目标滤波与航迹管理。仿真和海试数据处理结果表明, 在方位历程交叉的情况下, 所提方法能够准确检测目标的出现与消失, 连续、稳定地跟踪目标方位, 并输出准确的方位航迹, 有效克服了轨迹中断和误跟问题, 在低信噪比(−18 dB)条件下具有较好的检测跟踪性能, 但在信噪比突变条件下所提算法会错误判断目标出现与消失, 此时需要借助频谱等特征保证目标轨迹的连续性。
-
定义
$P \times P$ 维对称正定的复随机矩阵$ {\boldsymbol{Y}} $ 服从复逆威沙特分布, 记作$ {\boldsymbol{Y}}\sim \mathcal{C}\mathcal{I}\mathcal{W}({\boldsymbol{Y}};\rho ,{\boldsymbol{\varPhi }}) $ ,$ \rho \geqslant P $ 是自由度,$ {\boldsymbol{\varPhi}} $ 是$P \times P$ 维对称正定的尺度矩阵。假设复随机矩阵$ {\boldsymbol{Y}} $ 的期望${\rm{E}}[{\boldsymbol{Y}}]$ 和协方差矩阵$ {\rm{Cov}}[{\rm{vec}}({\boldsymbol{Y}})] $ 已知, 推导其自由度$ \widehat \rho $ 和尺度矩阵$ \widehat {\boldsymbol{\varPhi}} $ 的估计值。根据共轭性质[23], 复随机矩阵
$ Y $ 的逆服从复威沙特分布, 即根据复威沙特分布的性质, 复随机矩阵
$ {\boldsymbol{Y}} $ 的期望为根据文献[17]推论3.1.1, 对于任意
$P \times 1$ 维的非零复向量$ {\boldsymbol{b}} $ , 随机变量${\boldsymbol{\varLambda}} = {{({{\boldsymbol{b}}^{\rm H}}{\boldsymbol{Yb}})} / {({{\boldsymbol{b}}^{\rm H}}{\boldsymbol{\varPhi b}})}}$ 服从逆伽马(inverse Gamma, IG)分布, 写作$ \mathcal{I}\mathcal{G}(\varLambda ;\rho - P + 1) $ , 其概率密度函数为根据IG分布的性质, 随机变量
$ \varLambda $ 的方差为根据概率统计理论, 随机变量
$ \varLambda $ 的方差为根据矩阵向量化的性质
${\rm{vec}}({\boldsymbol{AC}}) = ({{\boldsymbol{C}}^{\rm{T}}} \otimes {{\boldsymbol{I}}_k}){\rm{vec}}({\boldsymbol{A}})$ , 式中$ {\boldsymbol{A}} $ 和$ {\boldsymbol{C}} $ 分别是$k \times n$ 维和$n \times m$ 维的矩阵,$ \otimes $ 表示克罗内克积。则式(A6)写为经推导, 自由度的估计值为
将
$ \widehat \rho $ 代入式(A2), 可以得到尺度矩阵的估计值, 即
面向方位历程交叉场景的多目标检测前跟踪方法
A multi-target track-before-detect algorithm in the scenario of bearing trajectory crossing
-
摘要: 针对传统先检测后跟踪方法在多目标方位历程交叉时存在轨迹中断或者误跟的问题, 提出了一种基于广义标签多伯努利滤波的多目标检测前跟踪方法。该算法直接利用声呐基阵接收数据构造的协方差矩阵作为观测, 无需波束形成等预处理技术, 构建了轨迹新生、消亡、演变及观测过程的概率模型, 并通过原理性近似消除了更新步骤的多维积分运算, 实现了联合多目标检测、方位跟踪与航迹管理。仿真结果表明, 所提算法不仅能够准确估计目标数量, 并且在方位历程交叉时也能连续、稳定地的输出多目标方位轨迹, 同时在低信噪比(−18 dB)条件下具备较高的跟踪精度。海底线阵试验数据也验证了所提算法性能。Abstract: Traditional detect-then-track approaches encounter challenges when the bearings of multiple targets occlude each other, leading to trajectory interruption or mismatch. To address this issue, a multi-target track-before-detect algorithm is proposed based on the generalized labeled multi-Bernoulli filtering. This method directly uses the raw data of the array elements as measurement in the form of covariance matrices, without pre-processing such as beamforming. Probabilistic models for trajectory birth, death, evolution, and observation are established. Multidimensional integration in the update step is eliminated by using a theoretical approximation. Joint multi-target detection, bearing tracking, and trajectory management are implemented. Simulation results show that the proposed method can accurately estimate the number of targets and produce consistent trajectories even when the bearings of multiple targets occlude each other. Additionally, it achieves high tracking accuracy under a low signal-to-noise ratio scenario (−18 dB). Sea trial data from seabed linear array also verify the performance of the proposed method.
-
Key words:
- Track-before-detect /
- Array signal processing .
-

-
表 1 GLMB-TBD算法实现流程
输入: 先验参数 $ {\pi _{k - 1}} = {\{ w_{k - 1}^{(I')},{\{ p_{k - 1}^{(I')}\} _{\ell \in I'}}\} _{I' \in \mathcal{F}\left( {{\mathbb{L}_{0:k - 1}}} \right)}} $ , 阵列观测

${{\boldsymbol{R}}_{{Z_k}}}$ , 存活概率

$ {P_{\rm S}} $ , 新生概率

$ {r_{\mathrm{B}}} $ ,

新生目标状态分布协方差矩阵 $ {{\boldsymbol{P}}_{\mathrm{B}}} $ , 入射信号功率门限

$ \sigma _{{\text{threshold}}}^2 $ 

输出: 后验参数$ {\pi _k} = {\{ w_k^{(I)},{[p_k^{(I)}]_{\ell \in I}}\} _{I \in \mathcal{F}\left( {{\mathbb{L}_{0:k}}} \right)}} $ 

1. 扫描方位空间, 得到新生目标状态均值$ {{\boldsymbol{m}}_{{\mathrm{B}},i}} = [{\theta _{{\text{peak}},i}},0,\sigma _{{\text{peak}},i}^2]_{i = 1}^{{n_{\mathrm{B}}}} $ 

2. 采样新生目标状态粒子集:$ \widetilde {\boldsymbol{x}}_B^{(j)} \sim \mathcal{N}( \cdot ;{\boldsymbol{m}}_{\mathrm{B}}^{},{\boldsymbol{P}}_{\mathrm{B}}^{}),{\text{ }}\omega _{\text{B}}^{(j)} = 1/J $ 

3. 构造$ {K_{\text{B}}} $ 个存活假设, 新生标签集为

$ L_{\text{B}}^{(b)},b = 1, \cdots ,{K_{\text{B}}} $ 

4. 计算新生假设权重$ {w_{\text{B}}}(L_{\text{B}}^{(b)}) = {[{r_{\mathrm{B}}}]^{L_{\text{B}}^{(b)}}}{[1 - {r_{\mathrm{B}}}]^{{\mathbb{L}_k} - L_{\text{B}}^{(b)}}} $ 

5.$ I' \in \mathcal{F}({\mathbb{L}_{0:k - 1}}) $ , 循环

6. 构造$ {K_{\text{S}}} $ 个存活假设, 存活标签集为

$ L_{\text{S}}^{(s)},s = 1, \cdots ,{K_{\text{S}}} $ 

7. 根据式(13)计算存活假设权重:$w_{\rm S}^{(I')}(L_{\text{S}}^{(s)}) = w_{k - 1}^{(I')}{[\eta _{\rm S}^{(I')}]^{L_{\text{S}}^{(s)}}}{[1 - \eta _{\rm S}^{(I')}]^{I' - L_{\text{S}}^{(s)}}}$ 

8. 根据式(14)采样存活目标状态粒子集:$ \widetilde {\boldsymbol{x}}_{\text{S}}^{(j)} \sim {f_{k|k - 1}}( \cdot |{\boldsymbol{x}}_k^{(j)}),{\text{ }}\omega _{\text{S}}^{(j)} = \omega _{k - 1}^{(j)} $ 

9. 组合存活假设与新生假设$ {I^{(s,b)}} = L_{\text{S}}^{(s)} \cup L_{\text{B}}^{(b)} $ , 循环

10. 预测假设权重:$w_{k|k - 1}^{({I^{(s,b)}})} = w_{\rm S}^{(I')}(L_{\text{S}}^{(s)})w_B^{}(L_{\text{B}}^{(b)})$ 

11. 预测目标状态粒子集:$ \{ \omega _{k|k - 1}^{(j)},\widetilde {\boldsymbol{x}}_{k|k - 1}^{(j)}\} _{j = 1}^J = \{ \widetilde {\boldsymbol{x}}_{\rm S}^{(j)},\omega _{\rm S}^{(j)}\} _{j = 1}^J \cup \{ \widetilde {\boldsymbol{x}}_{\mathrm{B}}^{(j)},\omega _{\mathrm{B}}^{(j)}\} _{j = 1}^J $ 

12. 若$ |{I^{(s,b)}}| = 0 $ 

13. 计算后验权重:$ \widehat w_k^{({I^{(s,b)}})} = w_{k|k - 1}^{({I^{(s,b)}})}\mathcal{C}\mathcal{W}_P^{}({{\boldsymbol{R}}_{{Z_k}}};M,\sigma _v^2{{\boldsymbol{I}}_P}) $ 

14. 若$ |{I^{(s,b)}}| \geqslant 1 $ 

15. 根据式(45)和(46)计算${{\boldsymbol{M}}_i}$ 和

${{\boldsymbol{C}}_i}$ 

16. 根据式(22)和(23)计算${{\boldsymbol{M}}_Y}$ 和

${{\boldsymbol{C}}_Y}$ 

17. 根据式(20)和(21)计算$\widehat \rho $ 和

$\widehat{\boldsymbol{ \varPhi}} $ 

18. 计算后验权重:$ \widehat w_k^{({I^{(s,b)}})} = w_{k|k - 1}^{({I^{(s,b)}})}\mathcal{C}\mathcal{G}\mathcal{B}_P^{{\mathrm{II}}}({{\boldsymbol{R}}_{{Z_k}}};M,\widehat \rho ,\widehat {\boldsymbol{\varPhi}} ) $ 

19. 若$ |{I^{(s,b)}}| = 1 $ , 更新粒子权重:

$ \omega _k^{(j)} = \dfrac{{\mathcal{C}\mathcal{W}_P^{}({{\boldsymbol{R}}_{{Z_k}}};M,\sigma _v^2{{\boldsymbol{I}}_P} + {{(\sigma _{k,i}^2)}^{(j)}}{\boldsymbol{a}}(\theta _{k,i}^{(j)})){{\boldsymbol{a}}^{\mathrm{H}}}(\theta _{k,i}^{(j)}))}}{{\mathcal{C}\mathcal{G}\mathcal{B}_P^{{\mathrm{II}}}({{\boldsymbol{R}}_{{Z_k}}};M,\widehat \rho ,\widehat {\boldsymbol{\varPhi}} )}} $ 

20. 若$ |{I^{(s,b)}}| > 1 $ ,

21. 根据式(47)和(48)计算每个粒子的${\boldsymbol{M}}_{{{\boldsymbol{Y}}_i}}^{(j)}$ 和

${{\boldsymbol{C}}_{{{\boldsymbol{Y}}_i}}}$ 

22. 根据式(33)和(34)计算每个粒子的$\widehat \rho _i^{(j)}$ 和

$\widehat{\boldsymbol{ \varPhi}} _i^{(j)}$ 

23. 更新粒子权重:$ \omega _k^{(j)} = \dfrac{{\mathcal{C}\mathcal{G}\mathcal{B}_P^{{\mathrm{II}}}({{\boldsymbol{R}}_{{Z_k}}};M,\widehat \rho _i^{(j)},\widehat {\boldsymbol{\varPhi}} _i^{(j)})}}{{\mathcal{C}\mathcal{G}\mathcal{B}_P^{{\mathrm{II}}}({{\boldsymbol{R}}_{{Z_k}}};M,\widehat \rho ,\widehat {\boldsymbol{\varPhi}} )}} $ 

24. 结束循环
 下载: 导出CSV
下载: 导出CSV
表 2 目标初始状态、运动参数、出现与消失时刻
目标 初始距离 (m) 初始方位 (°) 初始信噪比 (dB) 航向
(°)速度 (m/s) 出现时刻 (s) 消失时刻 (s) 1 1437 180 –9.5 90 7.3 1 150 2 7684 200 –16.8 330 6.4 5 150 3 7251 345 –16.6 75 5.4 10 150 4 656 32 –6.1 315 8.3 20 140 5 9176 230 –17.6 0 9.1 30 110 6 5230 300 –15.1 345 7.3 50 130
下载: 导出CSV
-
[1] Li Q H, Yin L, Zhao G Y, et al. Precise bearing and automatic target tracking in digital sonar. Chinese Journal of Acoustics, 1996; 15(1): 29−33 doi: 10.15949/j.cnki.0217-9776.1996.01.004 [2] 任宇飞, 李宇, 黄海宁. 能量值和方位信息结合的粒子滤波算法. 哈尔滨工程大学学报, 2017; 38(7): 1143−1150 doi: 10.11990/jheu.201604063 [3] 刘妹琴, 韩学艳, 张森林, 等. 基于水下传感器网络的目标跟踪技术研究现状与展望. 自动化学报, 2021; 47(2): 235−251 doi: 10.16383/j.aas.c190886 [4] Capon J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE, 1969; 57(8): 1408−1418 doi: 10.1109/PROC.1969.7278 [5] Zhang Y, Ng B. MUSIC-Like DOA estimation without estimating the number of sources. IEEE Trans. Signal Process., 2010; 58(3): 1668−1676 doi: 10.1109/TSP.2009.2037074 [6] Wang Q, Yu H, Li J, et al. Adaptive grid refinement method for DOA estimation via sparse Bayesian learning. IEEE J. Oceanic Eng., 2023; 48(3): 806−819 doi: 10.1109/JOE.2023.3235055 [7] Davey S J, Rutten M G, Gordon N J. Track-before-detect techniques, integrated tracking, classification, and sensor management. New Jersey: IEEE Press, 2016: 311−312 [8] Northardt T. A Cramér-Rao lower bound derivation for passive sonar track-before-detect algorithms. IEEE Trans. Inf. Theory, 2020; 66(10): 6449−6457 doi: 10.1109/TIT.2020.3013991 [9] Northardt T, Nardones S C. Track-before-detect bearings-only localization performance in complex passive sonar scenarios: A case study. IEEE J. Oceanic Eng., 2019; 44(2): 482−491 doi: 10.1109/JOE.2018.2811419 [10] 金盛龙, 李宇, 黄海宁. 水下多目标方位的联合检测与跟踪. 声学学报, 2019; 44(4): 503−512 doi: 10.15949/j.cnki.0371-0025.2019.04.011 [11] 王燕, 李想, 齐滨, 等. 无源声呐场景中使用辅助粒子滤波的邻近目标检测前跟踪方法. 声学学报, 2023; 48(2): 277−290 doi: 10.15949/j.cnki.0371-0025.2023.02.015 [12] Mahler R. Advances in statistical multisource-multitarget information fusion. Boston: Artech House, 2014: 50−54 [13] 李天成, 范红旗, 孙树栋. 粒子滤波理论、方法及其在多目标跟踪中的应用. 自动化学报, 2015; 41(12): 1981−2002 doi: 10.16383/j.aas.2015.c150426 [14] Da K, Li T, Zhu Y, et al. Recent advances in multisensor multitarget tracking using random finite set. Front. Inf. Technol. Electron. Eng., 2021; 22(1): 5−24 doi: 10.1631/FITEE.2000266 [15] Saucan A, Chonavel T, Sintes C, et al. Track before detect DOA tracking of extended targets with marked poisson point processes. 18th International Conference on Information Fusion, IEEE, Washington, DC, USA, 2015: 754−760 [16] Saucan A, Chonavel T, Sintes C, et al. CPHD-DOA tracking of multiple extended sonar targets in impulsive environments. IEEE Trans. Signal Process., 2016; 64(5): 1147−1160 doi: 10.1109/TSP.2015.2504349 [17] Masnadi-Shirazi A, Rao B. A covariance-based superpositional CPHD Filter for multi-source DOA tracking. IEEE Trans. Signal Process., 2018; 66(2): 309−323 doi: 10.1109/TSP.2017.2768025 [18] Zhang G, Zheng C, Qiu L, et al. Multi-Bernoulli filter for tracking multiple targets using sensor array. China Ocean Eng., 2020; 34(2): 245−256 doi: 10.1007/s13344-020-0023-7 [19] Vo B T, Vo B N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process., 2013; 61(13): 3460−3475 doi: 10.1109/TSP.2013.2259822 [20] Vo B N, Vo B T, Dinh P. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Trans. Signal Process., 2014; 62(24): 6554−6567 doi: 10.1109/TSP.2014.2364014 [21] Li S, Wei Y, Hoseinnezhad R, et al. Multi-object tracking for generic observation model using labeled random finite sets. IEEE Trans. Signal Process., 2017; 66(2): 368−383 doi: 10.1109/TSP.2017.2764864 [22] Papi F, Vo B N, Vo B T, et al. Generalized labeled multi-Bernoulli approximation of multi-object densities. IEEE Trans. Signal Process., 2015; 63(20): 5487−5497 doi: 10.1109/TSP.2015.2454478 [23] Shaman P. The inverted complex Wishart distribution and its application to spectral estimation. J. Multivar. Anal., 1980; 10(1): 51−59 doi: 10.1016/0047-259X(80)90081-0 [24] Gupta A, Nagar D. Matrix variate distributions. New York: Chapman and Hall, 1999: 18−19 [25] Fantacci C, Vo B T, Papi F, et al. The marginalized δ-GLMB filter. arXiv preprint: 1501.00926v2, 2017 [26] Fantacci C, Papi F. Scalable multi-sensor multi-target tracking using the marginalized δ-GLMB density. IEEE Signal Process. Lett., 2016; 23(6): 863−867 doi: 10.1109/LSP.2016.2557078 [27] Bethel R, Bell K. Maximum likelihood approach to joint array detection/estimation. IEEE Trans. Aerosp. Electron. Syst., 2004; 40(3): 1060−1072 doi: 10.1109/TAES.2004.1337474 [28] Fortmann T, Bar-shalom Y, Scheffe M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE J. Oceanic Eng., 1983; 8(3): 173−184 doi: 10.1109/JOE.1983.1145560 [29] Ristic B, Vo B N, Clark D, et al. A metric for performance evaluation of multi-target tracking algorithms. IEEE Trans. Signal Process., 2011; 59(7): 3452−3457 doi: 10.1109/TSP.2011.2140111 [30] Streit R, Walsh M. Bearings-only target motion analysis with acoustic propagation models of uncertain fidelity. IEEE Trans. Aerosp. Electron. Syst., 2002; 38(4): 1122−1137 doi: 10.1109/TAES.2002.1145738 -
图( 15) 表( 2)
计量
- 文章访问数: 1114
- HTML全文浏览数: 1114
- PDF下载数: 6
- 施引文献: 0