
 首页
首页 登录
登录 注册
注册





-
有源声呐工作在复杂多变的海洋环境中, 海面波浪、水中鱼群、海底礁石等对声波的反射与散射, 使声呐目标检测过程中伴随了大量的杂波干扰[1-3]。对目标动静的判断, 是实现多杂波、强混响背景下目标辨识的方向之一。
目标动静判断, 主要是依据目标的绝对速度或径向速度。目标绝对速度估计, 利用了由跟踪器标记的目标连续多帧测点位置, 基于目标运动模型与声呐观测模型, 通过卡尔曼滤波[4]、极大似然估计[5]等算法实现。近几十年来, 相继提出了联合概率数据关联(JPDA)算法[6]、多假设跟踪(MHT)算法[7]、假设概率密度(PHD)滤波器[8]、广义标签多伯努利(GLMB)滤波器[9]等。然而, 在低检测概率、高杂波率、低数据率、大测量误差的有源声呐目标跟踪场景中, 关联跳点、错跟、假跟等[10]的存在, 使目标绝对速度的估计收敛需较长时间, 从而难以快速辨识运动目标。目标径向速度估计, 主要是通过多普勒敏感信号探测, 利用运动目标检测指示(MTI)[11]等算法实现。常用的多普勒敏感信号有单频矩形脉冲(CW)信号[12-13], 线性调频脉冲(LFM)信号[14]等。近年来, Yang等将多普勒敏感的二进制相移键控(BPSK)编码信号用于港口反蛙人声呐, 通过对目标多普勒速度的测定推断其威胁[15]; 孙大军等进一步研究了利用BPSK信号的运动小目标抗干扰探测方法[16]; 周增胜等提出了利用正弦调频信号(SFM)的速度敏感特性分辨运动目标的方法[17]。然而, 基于多普勒敏感信号的运动目标辨识方法需要空间−时间−频移的三维度处理, 相比于多普勒不敏感信号的空间−时间两维处理, 这类方法的处理复杂度增加了一个量级, 并且在三维数据中检测目标时的虚警率也更高。
跟踪测速需较长的收敛时间, 多普勒敏感信号测速处理复杂且虚警率高; 而双曲调频(HFM)信号因其宽带多普勒不敏感性, 在有源声呐探测过程中不需要进行细致的多普勒补偿, 对运动目标检测具有独特优势[18]。为利用HFM信号的良好检测性能, 同时测定目标径向速度, 庞玉红等根据HFM信号的多普勒不变性原理[19-21], 提出了基于正反HFM信号的目标测速方法, 通过仿真验证了方法的可行性[22]; 王方勇等进行了实际数据分析的补充研究[23]。然而, 对于HFM信号的组合形式、目标回声多亮点强度起伏下的组合HFM信号径向速度测量特性、组合HFM信号目标回波多亮点配对等关键问题, 仍缺乏分析。本文针对这些影响测速性能的关键问题, 提出了利用组合双曲调频信号的目标径向速度测量与测距去偏方法。根据HFM信号的多普勒不变性和目标测距偏差原理, 给出了两种基本的HFM信号组合形式及对应的目标径向速度测量与测距去偏的实现表达式; 分析了信号模糊度与目标回波多亮点强度起伏对组合HFM信号径向速度测量误差的影响, 并给出了典型场景下组合HFM信号的径向速度测量特性; 通过对组合HFM信号回声强度波形的相关处理, 较大程度上减少了目标径向速度估计误差。该方法能够利用多普勒不敏感信号, 准确地实现目标径向速度的单帧测定, 同时能够修正HFM信号的目标距离测量偏差。
-
本节简述实数域双曲调频信号及匹配滤波, 分析HFM信号的多普勒不变性和测距偏差原理, 给出两种不同HFM信号组合形式下的目标径向速度测量与测距去偏的实现表达式。
-
双曲调频信号是一种广泛使用的多普勒不敏感信号, 按其瞬时频率的变化规律, 可分为瞬时频率随时间递增和瞬时频率随时间递减两类; 其中, 瞬时频率随时间递增的双曲调频信号, 记为正双曲调频(HFM+)信号。实数域HFM+信号的时域表达式为
式中,
$K $ ,$ \beta $ 为HFM信号的调频参数, 且$ K = {f_{\rm L}} ( \beta + {T / 2} ) $ ,$ \beta = {{T{f_0}} \mathord{\left/ {\vphantom {{T{f_0}} B}} \right. } B} $ ;$ T $ ,$ B $ ,$ {f_0} $ 分别表示HFM信号的脉宽、带宽和中心频率;$ {f_{\rm L}} $ ,$ {f_{\rm H}} $ 分别表示HFM信号的起始频率和截止频率, 且$ {f_{\rm L}} = {f_0} - {B \mathord{\left/ {\vphantom {B 2}} \right. } 2} $ ,$ {f_{\rm H}} = {f_0} + {B / 2} $ 。为便于后续分析讨论, 这里直接给出HFM+信号的瞬时相位为
$ {\varphi _ + }\left( t \right) = - 2\pi K\ln \left( {1 - ({1 \mathord{\left/ {\vphantom {1 \beta }} \right. } \beta })\left( {t - {T \mathord{\left/ {\vphantom {T 2}} \right. } 2}} \right)} \right) $ , HFM+信号的瞬时频率为$ {f_ + }( t ) = (1 /2\pi){\dot \varphi _ + }( t ) = -K/((t- T/2)-\beta) $ 。瞬时频率随时间递减的双曲调频信号, 记为负双曲调频(HFM−)信号。实数域HFM−信号的时域表达式为
同样地, 给出HFM−信号的瞬时相位为
$ {\varphi _ - }\left( t \right) = 2\pi K \cdot \ln \left( {1 + {{(1} \mathord{\left/ {\vphantom {{(1} \beta }} \right. } \beta })\left( {t - {T \mathord{\left/ {\vphantom {T 2}} \right. } 2}} \right)} \right) $ , HFM−信号的瞬时频率为$ {f_ - }\left( t \right) = ({1 \mathord{\left/ {\vphantom {1 {2\pi }}} \right. } {2\pi }}){\dot \varphi _ - }\left( t \right) = {K \mathord{\left/ {\vphantom {K {\left( {\left( {t - {T \mathord{\left/ {\vphantom {T 2}} \right. } 2}} \right) + \beta } \right)}}} \right. } {\left( {\left( {t - {T \mathord{\left/ {\vphantom {T 2}} \right. } 2}} \right) + \beta } \right)}} $ 。将信号
$ {s_ + }\left( t \right) $ 和信号$ {s_ - }\left( t \right) $ 泛化地记为$ s\left( t \right) $ , 噪声记为$ n\left( t \right) $ , 接收信号可表达为$ x\left( t \right) = s\left( t \right) + n\left( t \right) $ 。参考文献[24], 接收信号相关处理的表达式为匹配滤波器的脉冲响应函数为
$ h\left( t \right) = {c_{h}}s\left( {T - t} \right) $ ,$ {c_{h}} $ 为常数; 可见, 匹配滤波与相关处理是等效的。 -
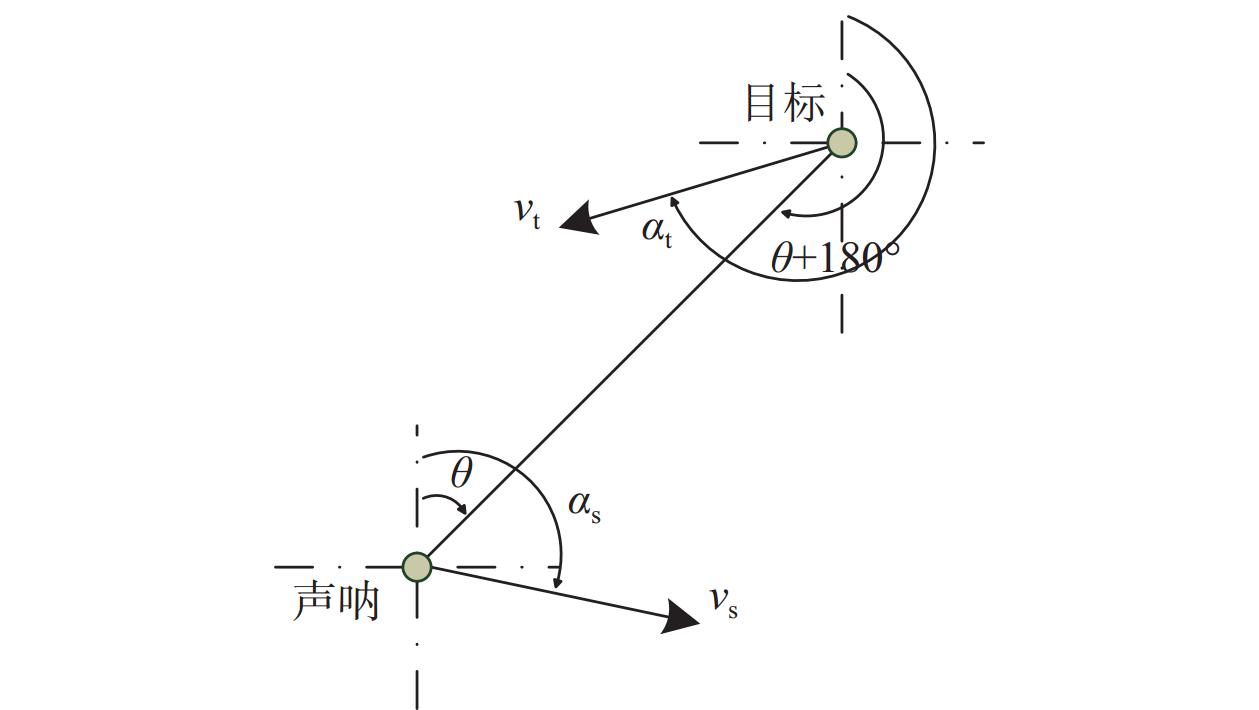
声呐与目标相对运动的一种典型场景如图1所示, 其中声呐的运动速度为
$ {v_{\rm s}} $ , 运动方向为$ {\alpha _{\rm s}} $ , 目标位于声呐的$ \theta $ 方位, 且目标运动速度为$ {v_{\rm t}} $ , 运动方向为$ {\alpha _{\rm t}} $ 。当声呐靠近目标运动时, 定义声呐运动在目标方向上的速度分量$ {v_{\rm sr}} $ 为正, 反之为负; 同理, 当目标靠近声呐运动时, 定义目标的径向速度$ {v_{\rm tr}} $ 为正, 反之为负。根据图示几何关系, 有则由声呐与目标相对运动引起的信号脉宽压缩系数为
式中,
$ c $ 表示水中声速。(1) HFM+信号的多普勒不变性与测距偏差分析
声呐与目标相对运动时, 发射HFM+信号下的声呐接收回声信号可表示为
其相位为
$ {\varphi _ + }\left( {Dt} \right) = - 2\pi K\ln \left( {1 - {{(1} \mathord{\left/ {\vphantom {{(1} \beta }} \right. } \beta })\left( {Dt - {T \mathord{\left/ {\vphantom {T 2}} \right. } 2}} \right)} \right) $ , 瞬时频率为式中,
$ \Delta {t_ + } $ 表示由多普勒效应引起的HFM+信号瞬时频率的时间平移, 则有根据式(8)和式(9), HFM+信号的多普勒效应等效于其瞬时频率在时间上的平移。在实际的有源声呐目标定位中, 目标速度(或径向速度)往往是未知的, 无法解得
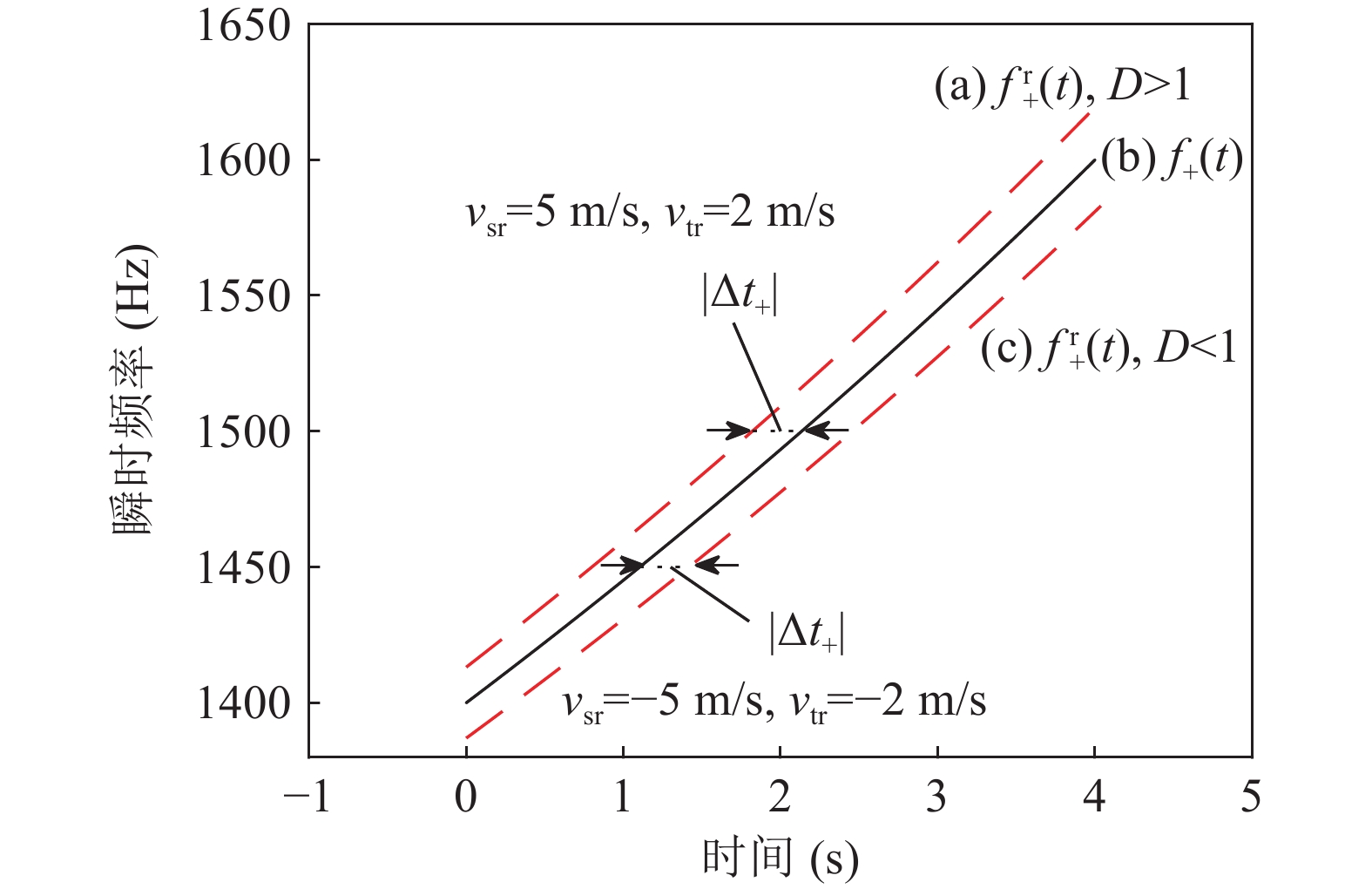
$ \Delta {t_ + } $ , 导致了HFM+信号的目标测距偏差。给出HFM+信号的多普勒不变性与测距偏差原理的一个仿真示例, 如图2所示, 其中HFM+信号的中心频率
$ {f_0} = 1500 $ Hz, 带宽$ B = 200 $ Hz, 脉宽$ T = 4 $ s, 水中声速$ c = 1500 $ m/s。将$ {v_{\rm sr}} = 5 $ m/s,$ {v_{\rm tr}} = 2 $ m/s时的HFM+回声信号记为(a), 其瞬时频率曲线以上侧红色虚线表示; 将声源发射的HFM+信号记为(b), 其瞬时频率曲线以黑色实线表示; 将$ {v_{\rm sr}} = - 5 $ m/s,$ {v_{\rm tr}} = - 2 $ m/s时的HFM+回声信号记为(c), 其瞬时频率曲线以下侧红色虚线表示。由图2可见, 当目标与声呐靠近(即
$ D > 1 $ )时, HFM+回声信号的瞬时频率向左作了间隔为$ \left| {\Delta {t_ + }} \right| $ 的时间平移, 表明HFM+信号具有多普勒频移不变性。目标测距偏小$ \left| {\Delta {t_ + }} \right| \cdot {c \mathord{\left/ {\vphantom {c 2}} \right. } 2} $ ,$ D $ 未知时无法进行测距修正, 便形成了HFM+信号的目标测距偏差。同时, 由于HFM+回声信号的起始频率$ f_{\rm L}^{\rm r} $ 和截止频率$ f_{\rm H}^{\rm r} $ 变大, 即$ f_{\rm L}^{\rm r} = {f_{\rm L}} \cdot D $ ,$ f_{\rm H}^{\rm r} = {f_{\rm H}} \cdot D $ , 那么在频率区间$ \left( {{f_{\rm H}},f_{\rm H}^{\rm r}} \right) $ 内的回波信号频点无法与声源信号进行匹配, 将使回声信号的匹配输出强度略有下降, 并且$ {{\left( {f_{\rm H}^{\rm r} - {f_{\rm H}}} \right)} \mathord{\left/ {\vphantom {{\left( {f_{\rm H}^{\rm r} - {f_{\rm H}}} \right)} B}} \right. } B} $ 越大时的信号匹配损失越大。而当目标与声呐远离(即$ D < 1 $ )时, HFM+回声信号的瞬时频率向右作了间隔为$ \left| {\Delta {t_ + }} \right| $ 的时间平移, 目标测距偏大了$ \left| {\Delta {t_ + }} \right| \cdot {c \mathord{\left/ {\vphantom {c 2}} \right. } 2} $ 。对于信号(a), 将脉冲压缩系数
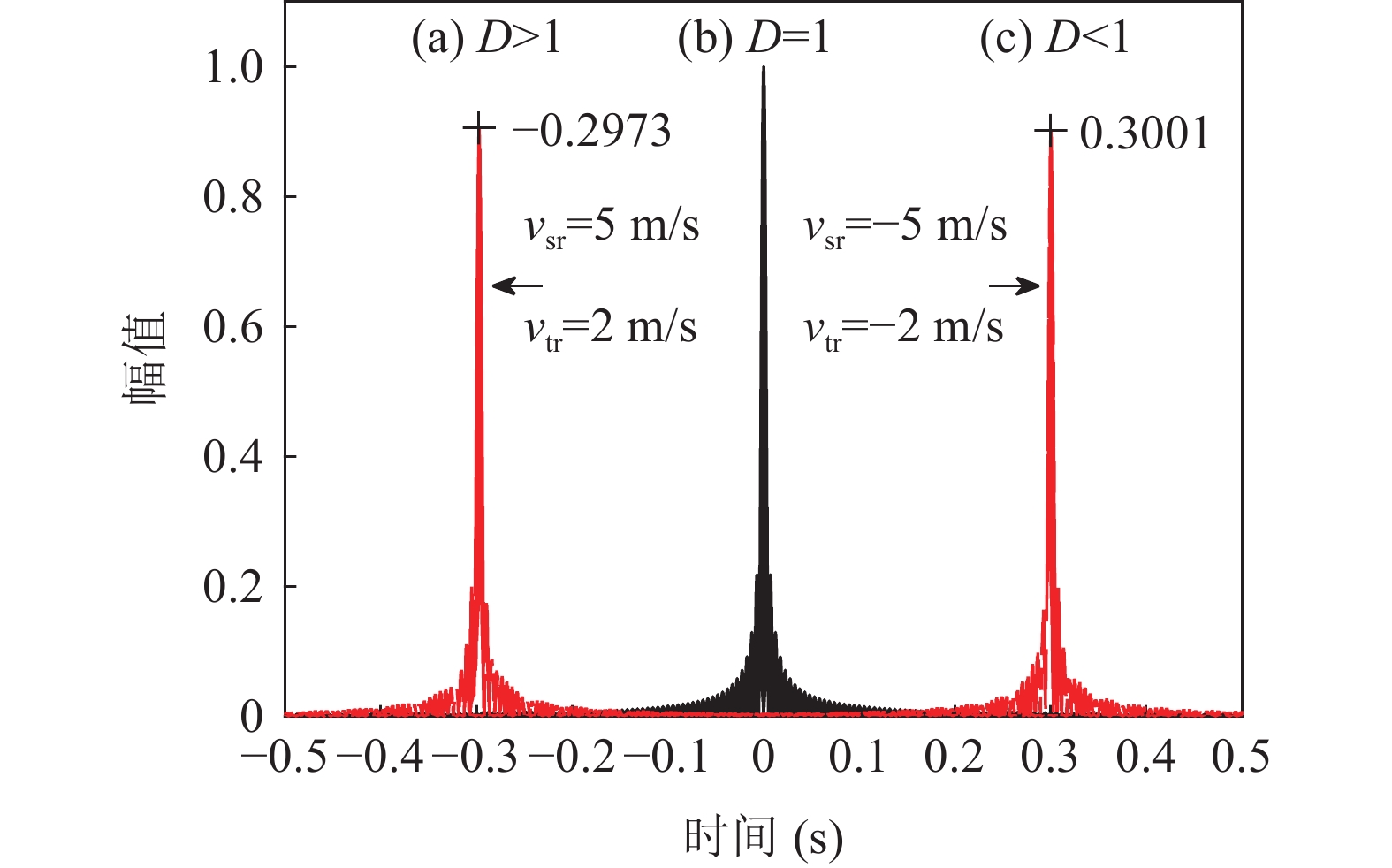
$ D = 1.0094 $ 代入式(8), 计算得其匹配峰值时移为$ \Delta {t_ + } = - 0.2973 $ s, 目标测距偏差为$ {{\Delta {t_ + } \cdot c} \mathord{\left/ {\vphantom {{\Delta {t_ + } \cdot c} 2}} \right. } 2} = - 223 $ m; 对于信号(c), 将脉冲压缩系数$ D = 0.9907 $ 代入式(8), 计算其匹配峰值时移为$ \Delta {t_ + } = 0.3001 $ s, 目标测距偏差为$ {{\Delta {t_ + } \cdot c} \mathord{\left/ {\vphantom {{\Delta {t_ + } \cdot c} 2}} \right. } 2} = 225 $ m。为验证这一结果的正确性, 将(a)(b)(c)三种HFM+信号与声源发射HFM+信号进行匹配滤波处理, 得到三种HFM+信号的匹配输出, 如图3所示。图中, 中间黑色线表示信号(b)的匹配输出; 左侧红色线表示信号(a)的匹配输出; 右侧红色线表示信号(c)的匹配输出。回声信号匹配峰值的时间偏移量等于理论计算结果, 且其匹配峰值略低于声源信号的匹配峰值。(2) HFM−信号的多普勒不变性原理与测距偏差分析
声呐与目标相对运动时, 发射HFM−信号下的声呐接收回声信号可表示为
其相位为
$ {\varphi _ - }\left( {Dt} \right) = 2\pi K\ln \left( {1 + ({1 \mathord{\left/ {\vphantom {1 \beta }} \right. } \beta })\left( {Dt - {T \mathord{\left/ {\vphantom {T 2}} \right. } 2}} \right)} \right) $ , 瞬时频率为式中,
$ \Delta {t_ - } $ 为由多普勒效应引起的HFM−信号瞬时频率的时间平移, 则同理, 根据式(12)和式(13), HFM−信号的多普勒效应等效于其瞬时频率在时间上的平移。在实际的有源声呐目标定位中, 目标速度(或径向速度)往往是未知的, 无法解得
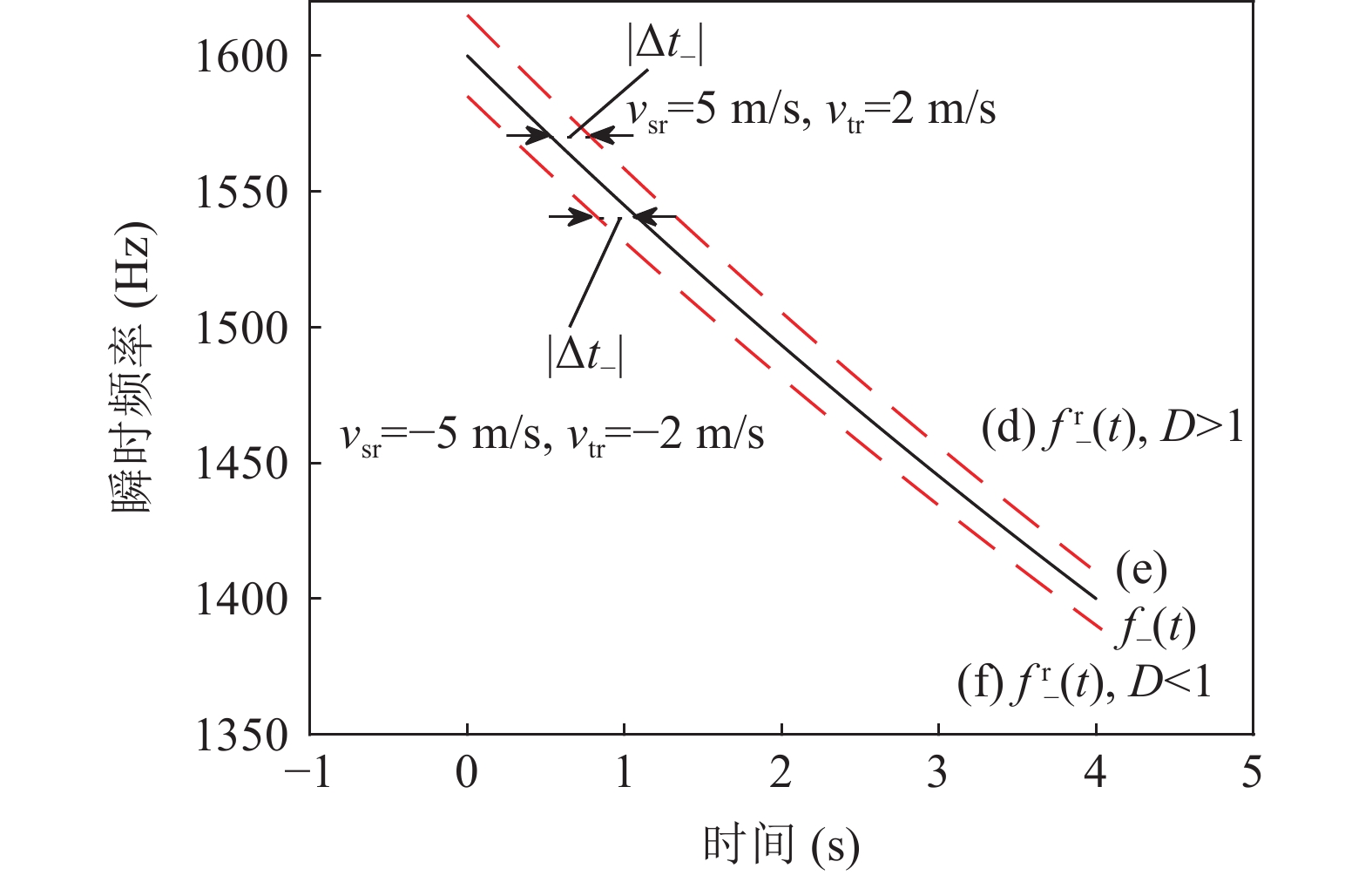
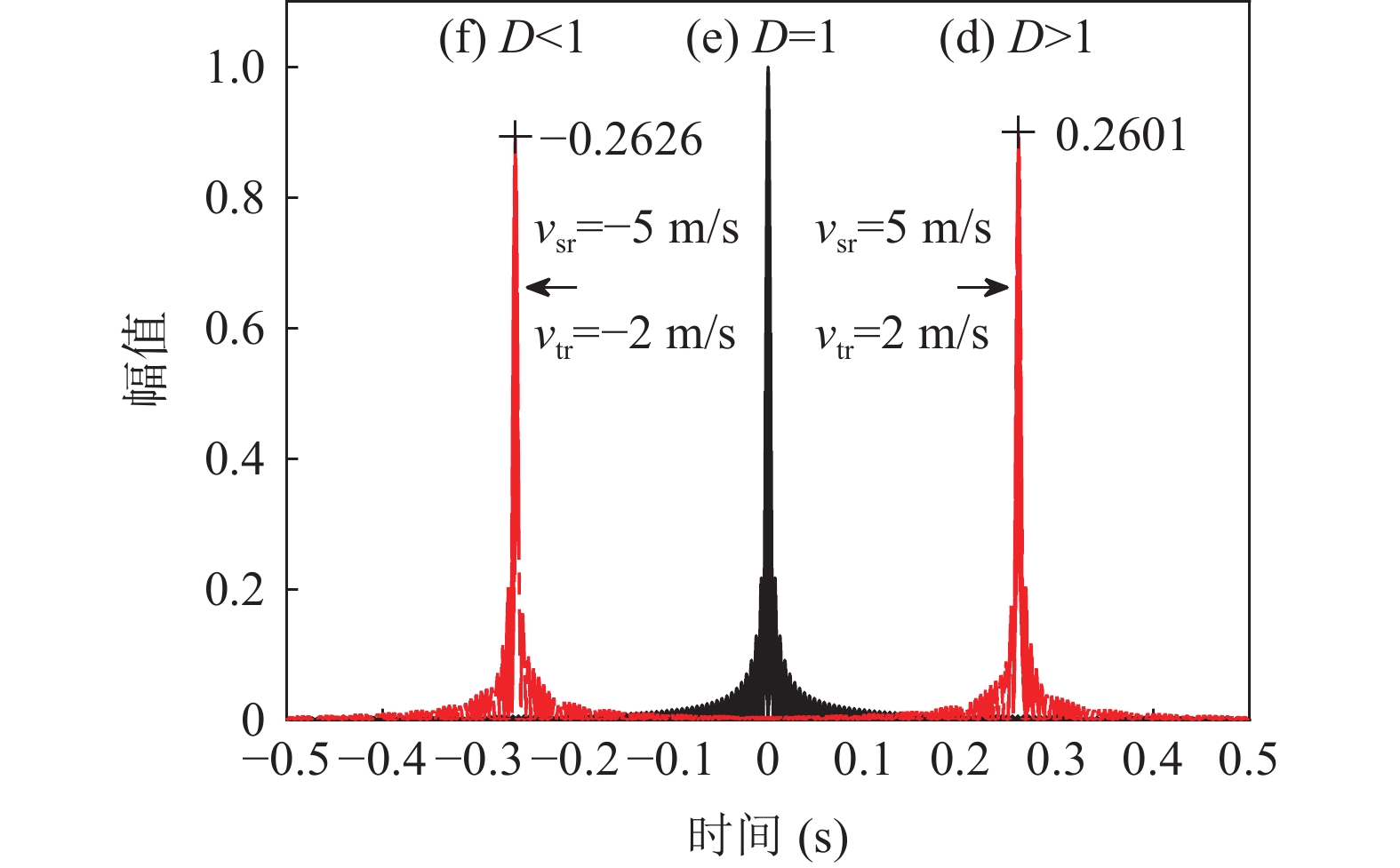
$ \Delta {t_ - } $ , 导致了HFM−信号的目标测距偏差。选取与上述分析相同的仿真参数, 给出HFM−信号的多普勒不变性与测距偏差的仿真示例, 如图4和图5所示。图中, 将
$ {v_{\rm sr}} = 5 $ m/s,$ {v_{\rm tr}} = 2 $ m/s时的HFM−回声信号记为(d), 将声源发射的HFM−信号记为(e), 将$ {v_{\rm sr}} = - 5 $ m/s,$ {v_{\rm tr}} = - 2 $ m/s时的HFM−回声信号记为(f)。通过HFM−信号与HFM+信号多普勒不变性原理的理论分析及仿真示例对比可见, 声呐与目标的相对运动时, HFM−信号瞬时频率的时间平移方向与HFM+信号瞬时频率的时间平移方向相反。
-
利用声呐与目标相对运动时HFM−信号瞬时频率的时间平移方向与HFM+信号瞬时频率的时间平移方向相反的规律, 通过发射组合HFM信号, 测定目标的HFM+信号回声和HFM−信号回声的匹配峰之间的间距, 可实现组合HFM信号的目标径向速度测量与测距去偏。
HFM信号的组合形式是影响目标径向速度测量精度的一个方面。HFM信号组合有两种基本形式, 其一, 先HFM+信号后HFM−信号, 记为HFM++HFM−; 其二, 先HFM−信号后HFM+信号, 记为HFM−+HFM+。
(1) HFM++HFM−的信号组合形式
假定, HFM+信号与HFM−信号的中心频率、带宽相同, HFM+信号脉宽为
$ {T_1} $ , HFM+信号与HFM−信号的时间间隔为$ {T_{\rm S}} $ , HFM−信号脉宽为$ {T_2} $ 。HFM++HFM−信号组合形式下发射信号的时频关系如图6所示。根据图6, 对发射信号分别用HFM+信号和HFM−信号进行匹配滤波处理, 则HFM+信号和HFM−信号匹配峰值间的时间间隔为
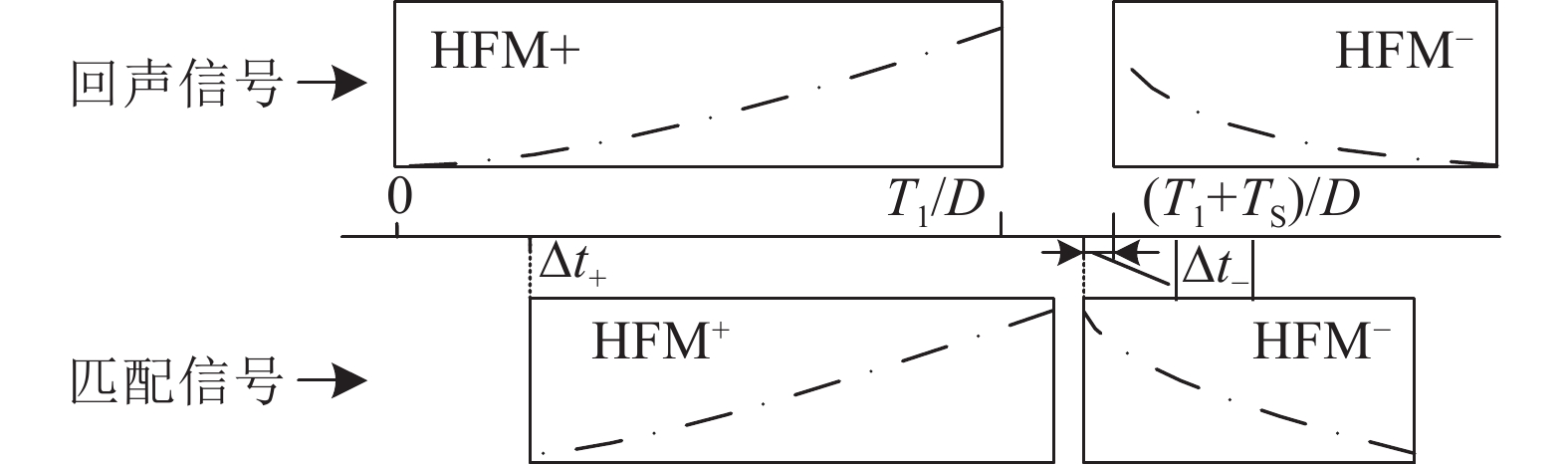
假定声呐与目标相对运动引起的脉宽压缩系数为
$ D $ 。HFM++HFM−的信号组合形式下, 回声信号与匹配信号的时频关系如图7所示。图中,$ \Delta {t_ + } $ 为由多普勒效应引起的HFM+信号瞬时频率的时间平移,$ \Delta {t_ - } $ 为由多普勒效应引起的HFM−信号瞬时频率的时间平移。根据图7, 对声呐接收的存在相对运动的目标回声信号, 分别用HFM+信号和HFM−信号进行匹配滤波处理, 则HFM+信号和HFM−信号匹配峰值间的时间间隔为
综合式(14)与式(15), 可得由多普勒效应引起的HFM+信号和HFM−信号匹配峰值间的时间间隔变化量, 即
记系数
$ {k_{t1}} = \left( { - {{{f_0}} \mathord{\left/ {\vphantom {{{f_0}} B}} \right. } B} + {1 \mathord{\left/ {\vphantom {1 2}} \right. } 2}} \right)\left( {{T_1} + {T_2}} \right) + {T_{\rm S}} $ , 则可得到由多普勒效应引起的信号脉宽压缩系数为声呐的运动速度和运动方向通常已知, 代入式(5)可估计出目标的径向速度:
式中,
$ {D_{\rm s}} $ 表示由声呐运动引起的信号脉宽压缩, 具体为$ {D_{\rm s}} = {{\left( {c + {v_{\rm sr}}} \right)} \mathord{\left/ {\vphantom {{\left( {c + {v_{\rm sr}}} \right)} {\left( {c - {v_{\rm sr}}} \right)}}} \right. } {\left( {c - {v_{\rm sr}}} \right)}} $ 。将脉宽压缩系数
$ D $ 代入式(9), 可得由多普勒效应引起HFM+信号的时间平移, 即$ \Delta {t_ + } $ 。假定由HFM+信号目标回声匹配峰值位置估计的目标距离为$ {R_{\textit{z}}} $ , 此时测距偏差为$ \Delta {t_ + } \cdot {c \mathord{\left/ {\vphantom {c 2}} \right. } 2} $ ; 那么, 目标测距可按下式修正:(2) HFM−+HFM+的信号组合形式
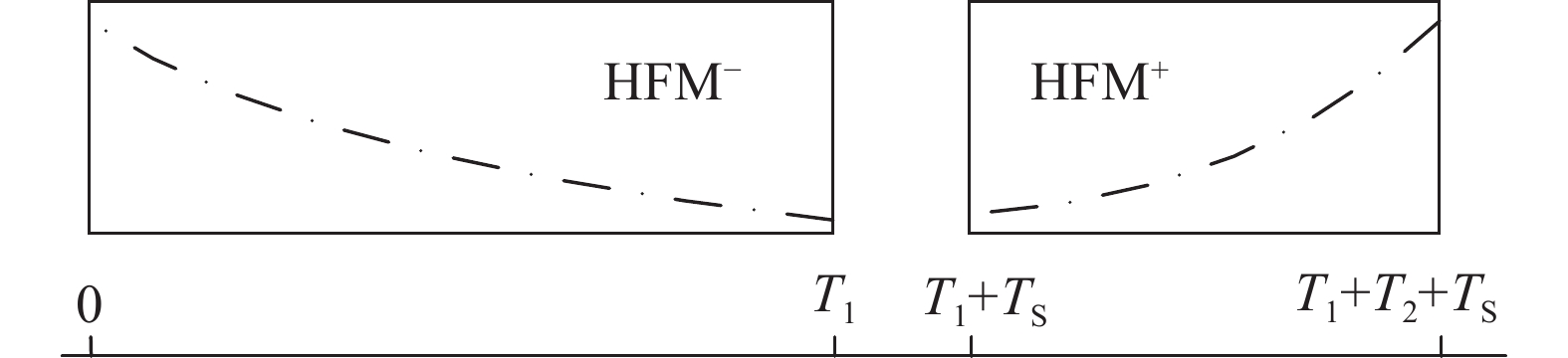
假定HFM−信号与HFM+信号的中心频率、带宽相同, HFM−信号脉宽为
$ {T_1} $ , HFM−信号与HFM+信号的时间间隔为$ {T_{\rm S}} $ , HFM+信号脉宽为$ {T_2} $ 。HFM−+HFM+的信号组合形式下, 发射信号的时频关系如图8所示。根据图8, 对发射信号, 分别用HFM−信号和HFM+信号进行匹配滤波处理, 则HFM−信号和HFM+信号匹配峰值间的时间间隔为
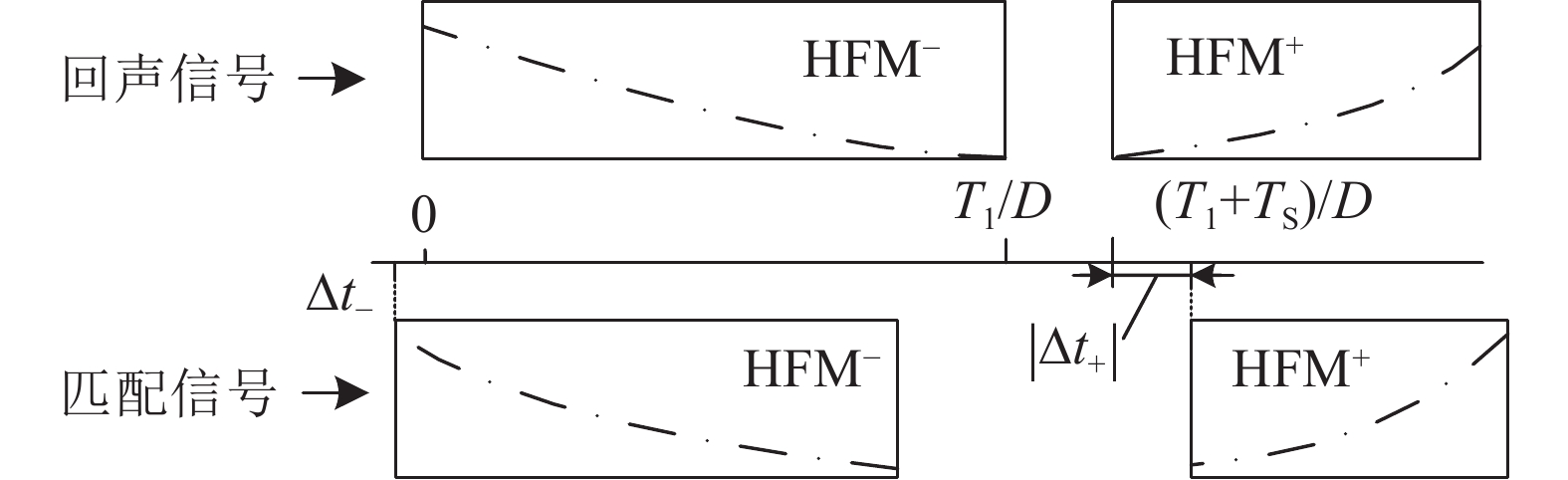
假定声呐与目标相对运动引起的脉宽压缩系数为
$ D $ 。HFM−+HFM+的信号组合形式下, 回声信号与匹配信号的时频关系如图9所示。图中,$ \Delta {t_ - } $ 为由多普勒效应引起的HFM−信号瞬时频率的时间平移,$ \Delta {t_ + } $ 为由多普勒效应引起的HFM+信号瞬时频率的时间平移。根据图9, 对声呐接收的存在相对运动的目标回声信号, 分别用HFM−信号和HFM+信号进行匹配滤波处理, 则HFM−信号和HFM+信号匹配峰值间的时间间隔为
综合式(21)与式(22), 可得由多普勒效应引起的HFM−信号和HFM+信号匹配峰值间的时间间隔变化量, 即
记系数
$ {k_{t2}} = \left( {{{{f_0}} \mathord{\left/ {\vphantom {{{f_0}} B}} \right. } B} + {1 \mathord{\left/ {\vphantom {1 2}} \right. } 2}} \right)\left( {{T_1} + {T_2}} \right) + {T_{\rm S}} $ , 可得由多普勒效应引起的信号脉宽压缩系数为将脉宽压缩系数
$ D $ 代入式(13), 可得由多普勒效应引起HFM−信号的时间平移为$ \Delta {t_ - } $ 。假定由HFM−信号目标回声匹配峰值位置估计的目标距离为$ {R_{\textit{z}}} $ , 此时测距偏差为$ \Delta {t_ - } \cdot {c \mathord{\left/ {\vphantom {c 2}} \right. } 2} $ , 则目标测距可按下式进行修正: -
假定由多普勒效应引起的HFM+信号和HFM−信号匹配峰值间的时间间隔变化量, 真值记为
$ \Delta t $ , 测量值记为$ \overline {\Delta t} $ , 测量误差记为$ {\sigma _{\Delta t}} $ 。在有源声呐目标的组合HFM信号探测中, 针对回声强度高于检测背景至少3 dB的目标,$ {\sigma _{\Delta t}} $ 的大小将主要受信号模糊度、目标回波多亮点强度起伏的影响。HFM++HFM−和HFM−+HFM+两种信号组合形式中, 将系数
$ {k_{t1}} $ ,$ {k_{t2}} $ 泛化地记为$ {k_t} $ 。目标径向速度的估计值可表示为当
$ {D_{\rm s}} \approx 1 $ ,$ {k_t} \gg {D_{\rm s}} $ 且$ {k_t} \gg \overline {\Delta t} $ 时, 式(27)可近似为根据式(28), 目标径向速度的估计误差可表示为
$ {\sigma _v} = {c \mathord{\left/ {\vphantom {c {\left( {2{k_t}} \right)}}} \right. } {\left( {2{k_t}} \right)}} \cdot {\sigma _{\Delta t}} $ 。由于$ {k_{t2}} > {k_{t1}} $ , 可知HFM−+HFM+组合形式下的目标径向速度测量精度会优于HFM++HFM−。(1)信号模糊度对径向速度测量误差的影响分析
根据HFM脉冲信号模糊函数特性, HFM+信号和HFM−信号的时延测量精度为
$ {{0.44} \mathord{\left/ {\vphantom {{0.44} B}} \right. } B} $ [12,25]。那么, 信号模糊度影响下的$ \Delta t $ 测量误差分量为进一步, 在信号模糊度影响下, HFM++HFM−信号组合形式的径向速度测量误差分量为
HFM−+HFM+信号组合形式的径向速度测量误差分量为
(2)目标回波多亮点强度起伏对径向速度测量误差的影响分析
通常将目标回波的强度波形中的每一个极大值位置称为一个亮点, 一个亮点往往表征了目标的一个结构声散射点; 多个极大值位置的集合称为目标回波多亮点。由于目标径向结构声散射点的散射强度变化、水声信道起伏变化等的影响, 目标回波多亮点强度具有起伏性, 该起伏性常会引起较大的径向速度测量偏差。
假定目标径向尺度为
$ L $ 。最差情况下, 可将目标回声匹配峰值位置的不确定度建模为目标径向尺度范围内的随机均匀分布。那么, 在组合HFM信号中, 第一个信号回声匹配峰值位置的不确定度为$ {X_1} \sim U\left( { - {L \mathord{\left/ {\vphantom {L 2}} \right. } 2},{L \mathord{\left/ {\vphantom {L 2}} \right. } 2}} \right) $ ; 第二个信号回声匹配峰值位置的不确定度为$ {X_2} \sim U\left( { - {L \mathord{\left/ {\vphantom {L 2}} \right. } 2},{L \mathord{\left/ {\vphantom {L 2}} \right. } 2}} \right) $ 。组合HFM信号测速利用了两回声匹配峰值间的时间间隔变化量, 不确定度的综合可用统计量$ X = {X_2} - {X_1} $ 进行表达。该统计量$ X $ 的概率分布为[26]其一阶矩和二阶矩, 分别为
则
目标回波多亮点强度起伏的影响下, HFM++HFM−信号组合形式的径向速度测量误差分量为
HFM−+HFM+信号组合形式的径向速度测量误差分量为
(3)目标径向速度测量误差综合
同时考虑信号模糊度、目标回波多亮点强度起伏对目标径向速度测量误差的影响, 综合误差
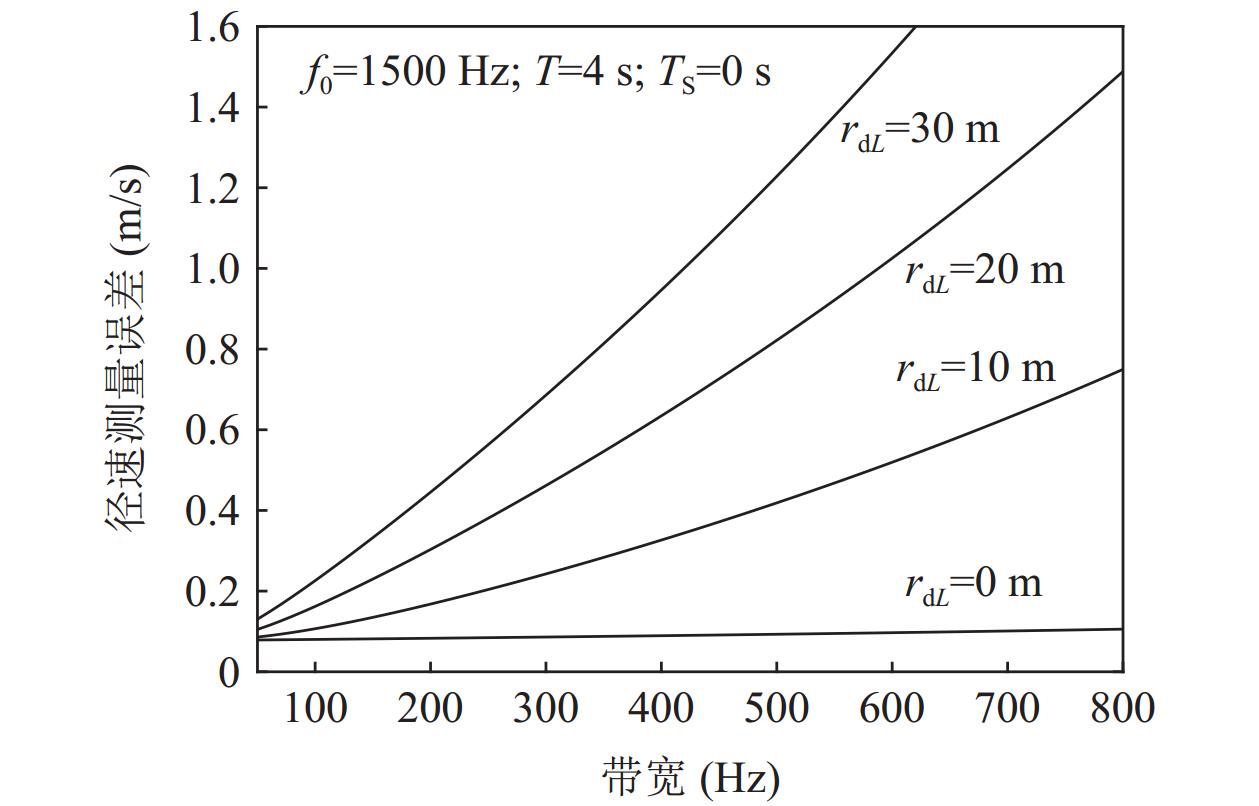
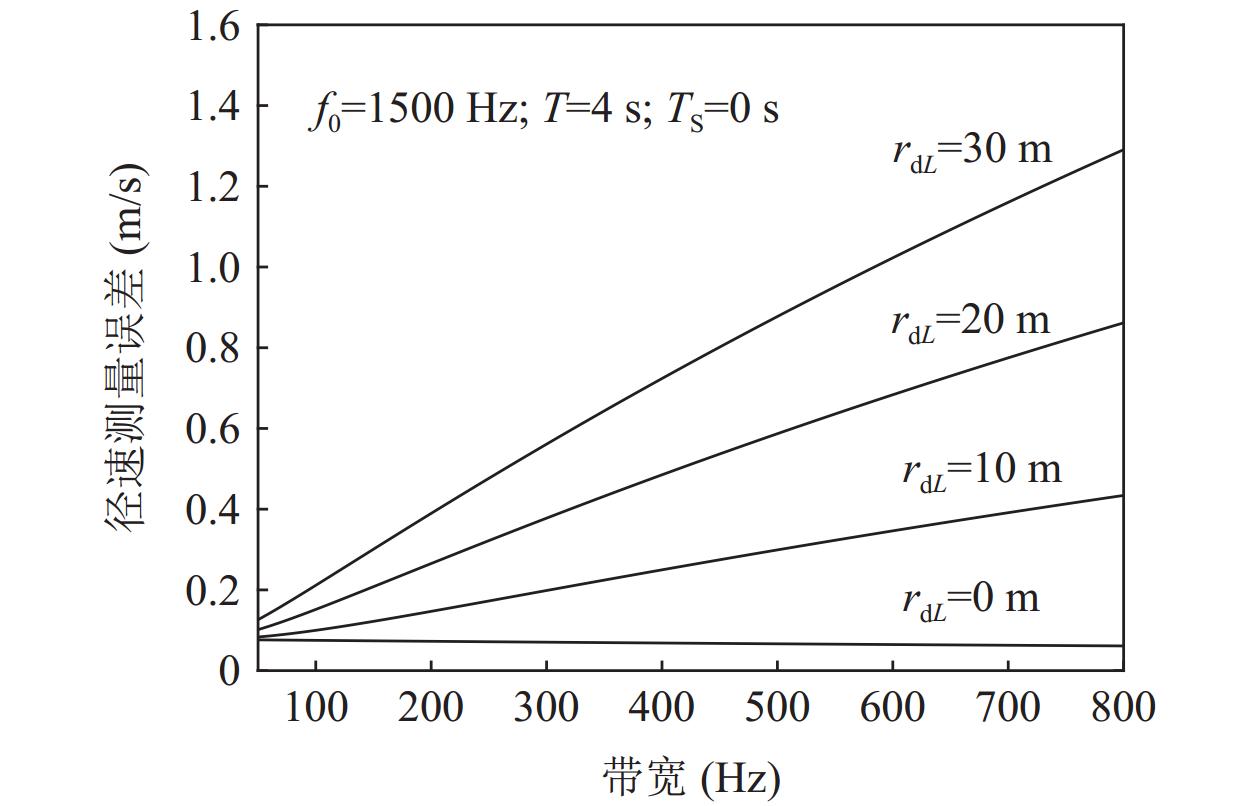
$ {\sigma _v} $ 的计算表达式为对组合HFM信号, 分别取
$ {f_0} = 1500 $ Hz,$ T = {T_1} + {T_2} = 4 $ s,$ {T_{\rm S}} = 0 $ s。不同信号带宽下, 目标径向尺度为0 m, 10 m, 20 m, 30 m时, HFM++HFM−与HFM−+HFM+两种信号组合形式的目标径向速度测量误差特性曲线分别如图10和图11所示, 其中rdL表示目标径向尺度。相对于HFM++HFM−信号组合形式, HFM−+HFM+能够获得更好的目标径向速度测量精度。当目标回波多亮点起伏对径向速度测量误差影响较大时, 100~800 Hz的常用信号带宽范围内, 较小的信号带宽能够获得更准确的径向速度测量结果。 -
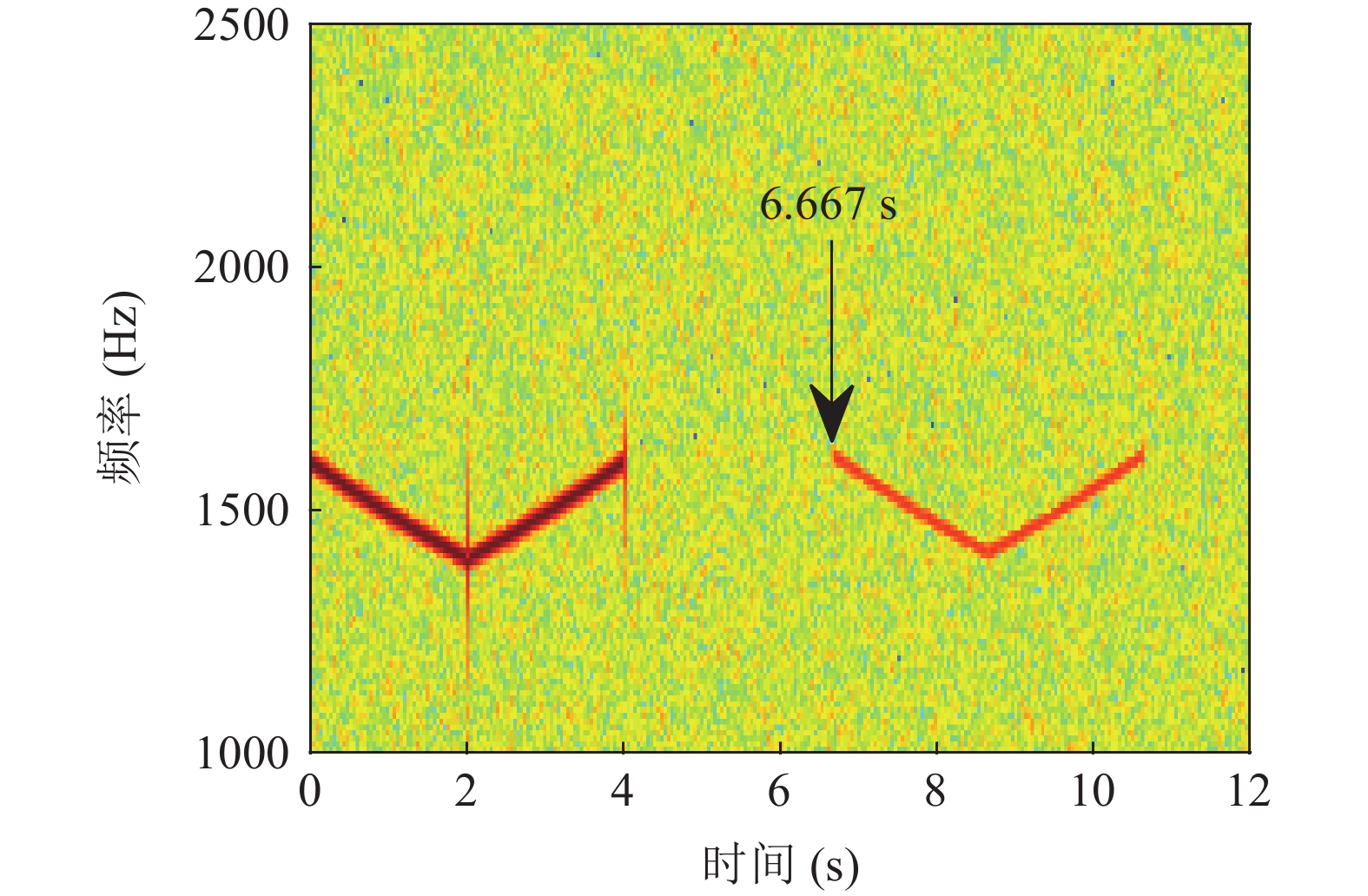
为验证利用组合HFM信号的目标径向速度测量与测距去偏方法的可行性, 在较高信噪比背景下, 以HFM−+HFM+信号组合形式为例进行仿真。设置HFM−信号与HFM+信号的中心频率为
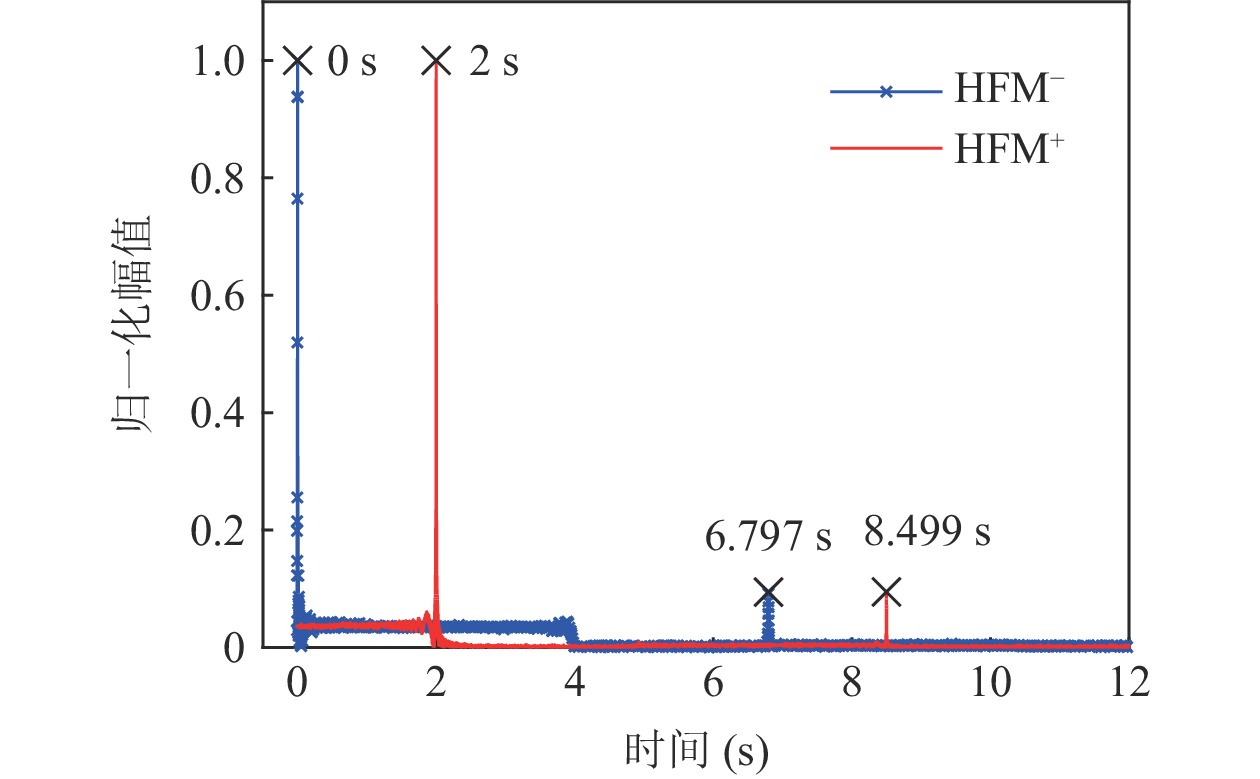
$ {f_0} = 1500 $ Hz, 带宽为$ B = 200 $ Hz, 脉宽为$ {T_1} = {T_2} = 2 $ s, 间隔为$ {T_{\rm S}} = 0 $ s; 水中声速$ c = 1500 $ m/s; 目标距声呐5 km, 声呐运动在目标方向上的速度分量为$ {v_{\rm sr}} = 5 $ m/s, 目标径向速度为$ {v_{\rm tr}} = 2 $ m/s。声呐接收的水中信号时频图如图12所示。先接收到的较强HFM−+HFM+信号为声源信号; 后接收到的较弱HFM−+HFM+信号为目标回声信号, 目标回声信号前沿对应的时刻为6.667 s (即5 km)。将发射HFM−信号与该接收信号进行匹配滤波处理, 得到HFM−信号的匹配输出, 如图13蓝色带叉线条所示。同样地, 将发射HFM+信号与该接收信号进行匹配滤波处理, 得到HFM+信号的匹配输出, 如图13红色线条所示。HFM−信号的目标回声匹配峰值位置为6.797 s, 则目标距离的直接测量值为
$ R_{\textit{z}} = 5.098 $ km, 直观显示了HFM信号的目标测距偏差。HFM−信号目标回声的匹配峰值位置为8.499 s。由多普勒效应引起的HFM−信号和HFM+信号匹配峰值间的时间间隔变化量为$ \overline {\Delta t} = - 0.298 $ s。将$ \overline {\Delta t} $ 代入式(25), 得脉宽压缩系数$ \overline D = 1.0094 $ ; 将$ \overline D $ 代入式(19), 得目标径向速度$ \overline {{v_{\rm tr}}} = 2.017 $ m/s; 将$ \overline D $ 代入式(19)和式(26), 得目标距离的修正值$ {R_{\rm t}} = 5.000 $ km。因此, 验证了所提方法的可行性。进一步验证组合HFM信号测速误差特性分析的正确性。在上述仿真背景下, 假定目标回声匹配峰值在10 m尺度内随机均匀分布(即rdL=10 m); 对HFM++HFM−与HFM−+HFM+两种信号组合形式, 分别进行60次蒙特卡罗仿真, 记录每一次的目标径向速度测量, 如图14(a)所示。本文约定以组合信号中的第一段信号回声的匹配峰值位置计算目标距离, 根据测得的径向速度和脉冲压缩系数
$ D $ , 由式(9)得到$ {\text{ }}\Delta {t_ + } $ , 而后由$ \Delta {t_ + } \cdot {c \mathord{\left/ {\vphantom {c 2}} \right. } 2} $ 计算得到HFM++HFM−下的测距偏差估计, 如图14(b)中蓝色圈标识所示; 将$ D $ 代入式(13)得到$ \Delta {t_ - } $ , 而后由$ \Delta {t_ - } \cdot {c \mathord{\left/ {\vphantom {c 2}} \right. } 2} $ 计算得到HFM−+HFM+下的测距偏差估计, 如图14(b)中红色叉标识所示。HFM−+HFM+下的目标测距呈正偏差, HFM++HFM−下的目标测距呈负偏差, 验证了声呐与目标的相对运动时, HFM−信号瞬时频率的时间平移方向与HFM+信号瞬时频率的时间平移方向相反。改变HFM+信号和HFM−信号的带宽, 在$ B = 400 $ Hz条件下分别得到HFM++HFM−与HFM−+HFM+信号组合形式下的60次蒙特卡罗仿真结果, 如图15所示。分别统计HFM++HFM−与HFM−+HFM+两种组合形式,
$ B = 200 $ Hz和$ B = 400 $ Hz两种带宽下的蒙特卡罗仿真结果, 得到目标径向速度测量与测距偏差估计精度, 如表1所示。结合图14和图15可知, HFM−+HFM+信号组合形式的测速估计精度略优于HFM++HFM−; 回声匹配峰值位置在一定尺度内随机变化时, 200 Hz带宽信号的测速精度优于带宽为400 Hz的信号。该统计结果也验证了图10和图11所示的目标径向速度测量误差特性曲线的正确性。 -
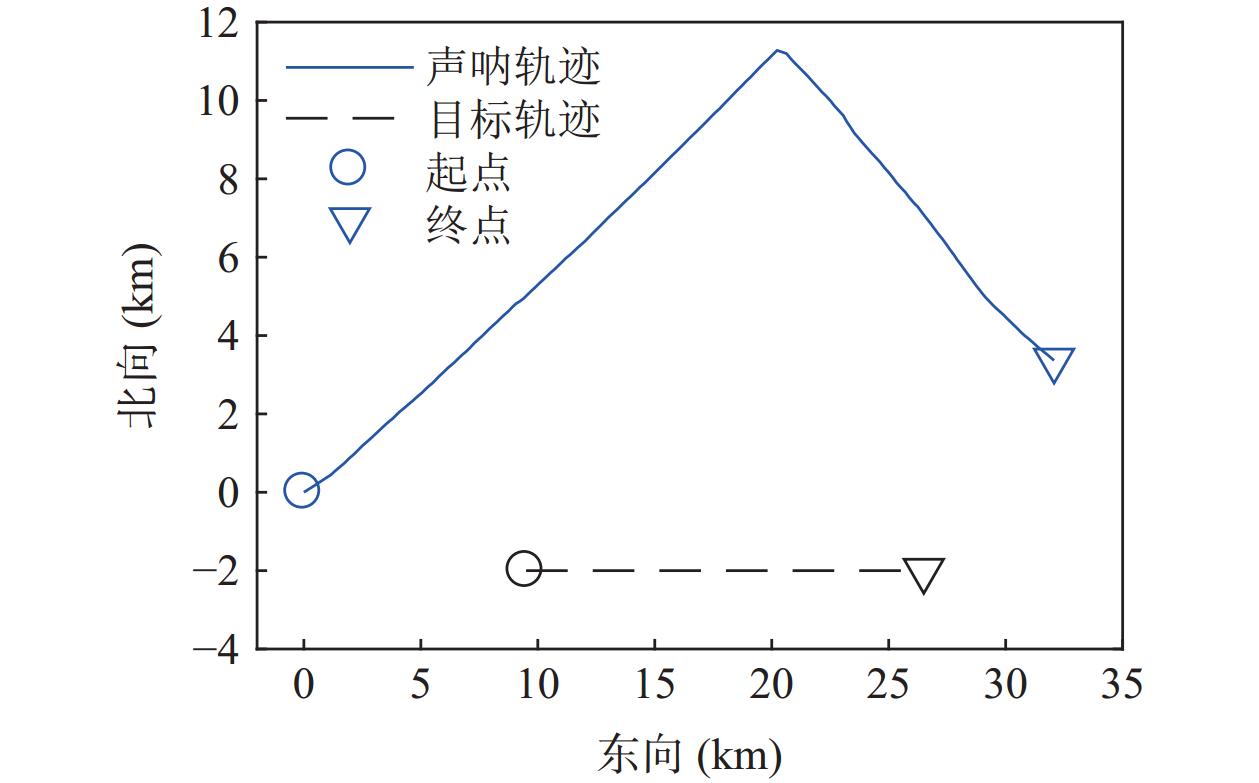
选取2022年在中国南海采集的海上数据进行处理, 这段数据中声呐与渔船(目标)的运动轨迹如图16所示。
(1)基于回波强度最大值位置的径向速度直接测量方法
基于回波强度最大值位置的径向速度直接测量方法简记为直接测量法。该方法是在目标回声的波束方向上, 直接取HFM+信号与HFM−信号匹配输出强度上的最大值位置, 得到由多普勒效应引起的组合HFM信号匹配峰值间的时间间隔变化量(即
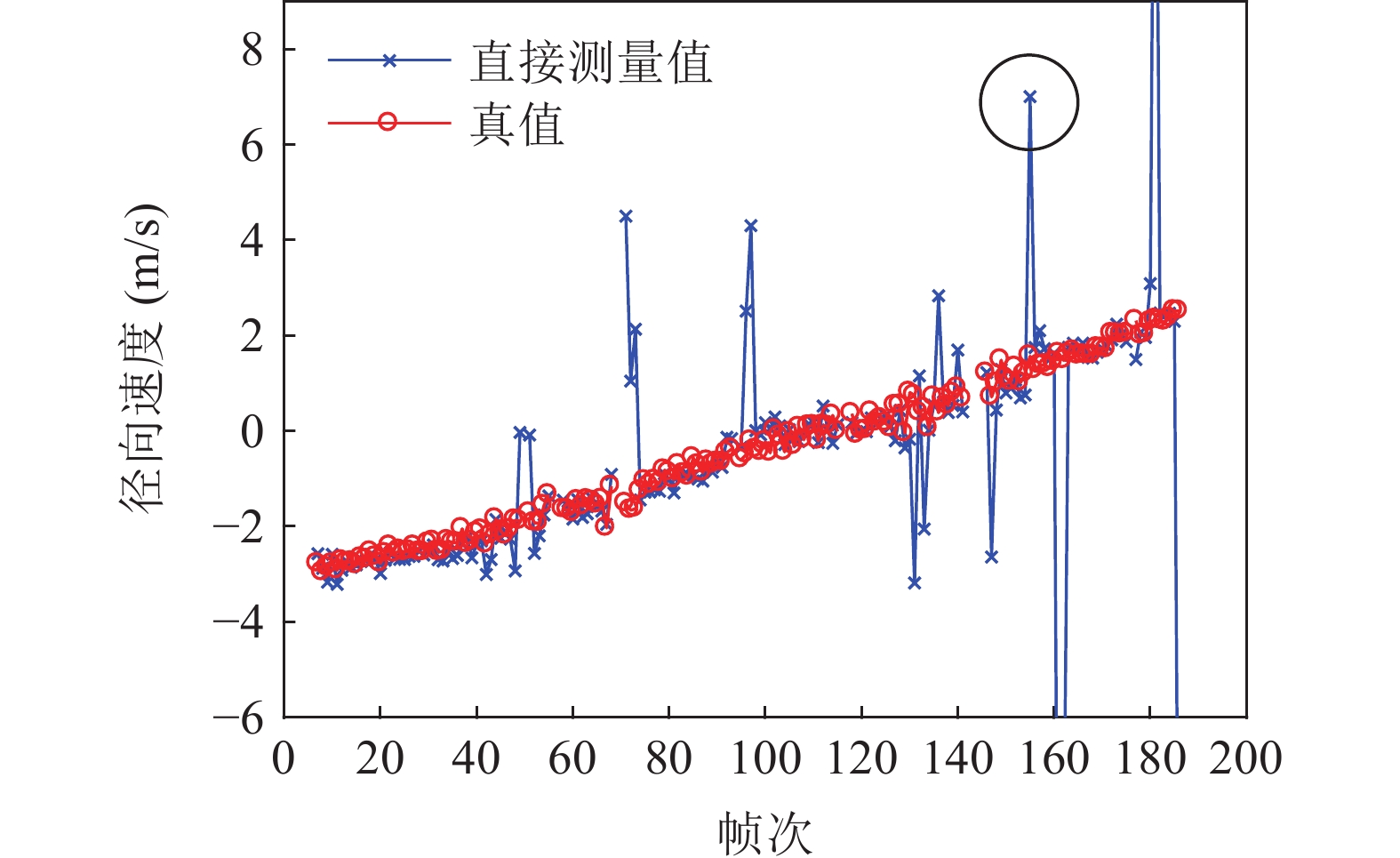
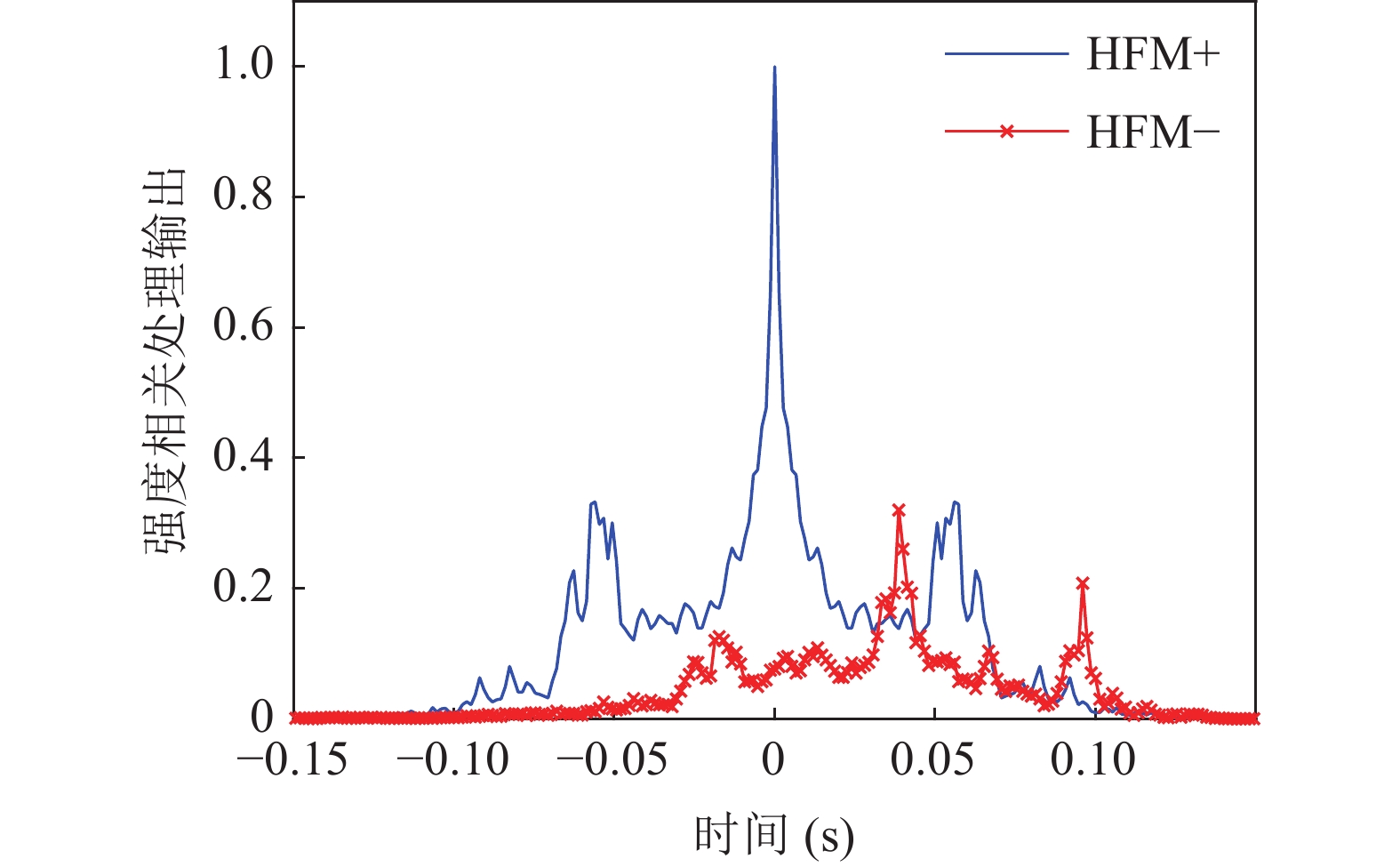
$ \Delta t $ ), 进而计算出目标的径向速度。直接测量法的目标径向速度估计结果如图17所示, 在多数声呐探测帧次, 直接测量法可较准确地测定目标径向速度, 但也常常出现目标径向速度测量偏差较大的情况。为具体分析目标径向速度测量偏差较大的原因, 选取图17中以黑色圆圈标识的探测帧次(即第155帧), 绘制HFM+信号与HFM−信号的目标回波强度波形, 如图18所示。对于该目标的2个显著回声亮点(图中用圈标注), 在HFM+信号的目标回波中, 亮点1强度大于亮点2; 在HFM−信号的目标回波中, 亮点1强度反而弱于亮点2。这表明目标回波多亮点强度起伏导致了该帧数据中直接测量法出现的较大测速偏差。
(2)利用目标回波强度波形相关处理的径向速度测量方法
为解决目标回声多亮点强度起伏导致直接测量方法易出现较大径向速度测量偏差的问题, 提出利用目标回波强度波形相关处理的径向速度测量方法, 简记为相关测量法。相关测量法是将HFM+信号(或HFM−信号)的目标回波强度波形, 分别与HFM+信号、HFM−信号的目标回波强度波形进行自相关、互相关处理, 得到HFM+信号与HFM−信号目标回波强度波形的相关处理输出; 分别取HFM+信号与HFM−信号目标回波强度波形相关处理输出的最大值位置, 得到由多普勒效应引起的组合HFM信号匹配峰值间的时间间隔变化量(即
$ \Delta t $ ), 进而计算出目标的径向速度。仍然选取图17中黑色圆圈标注的第155帧数据。HFM+信号与HFM−信号目标回波强度波形的相关处理输出, 如图19所示。其中, 蓝色实线表示HFM+信号目标回波强度波形的自相关输出; 红色叉线表示HFM−信号目标回波强度波形与HFM+信号目标回波强度波形的互相关输出。HFM+信号与HFM−信号目标回波强度波形相关处理输出的最大值位置间隔约为0.04 s, 该值与两种HFM信号目标回声对应亮点间的时间间隔相等, 初步验证了相关测量法的有效性。
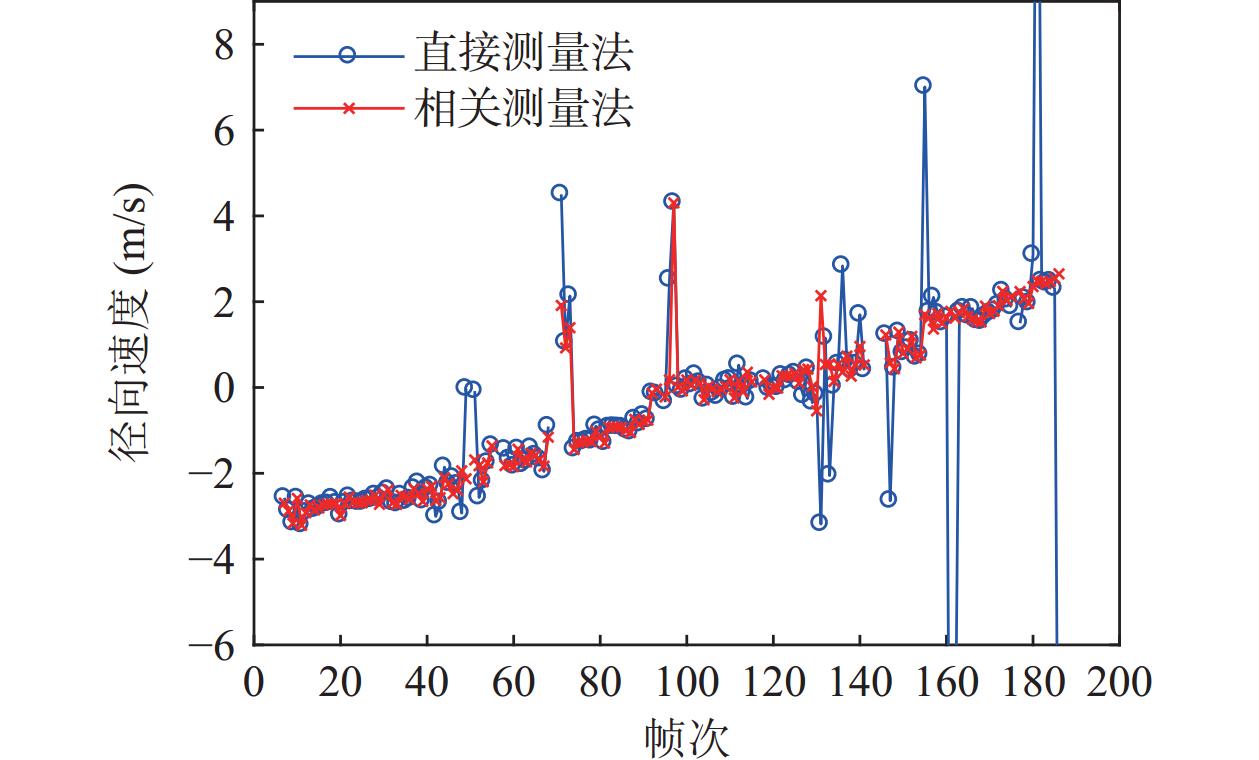
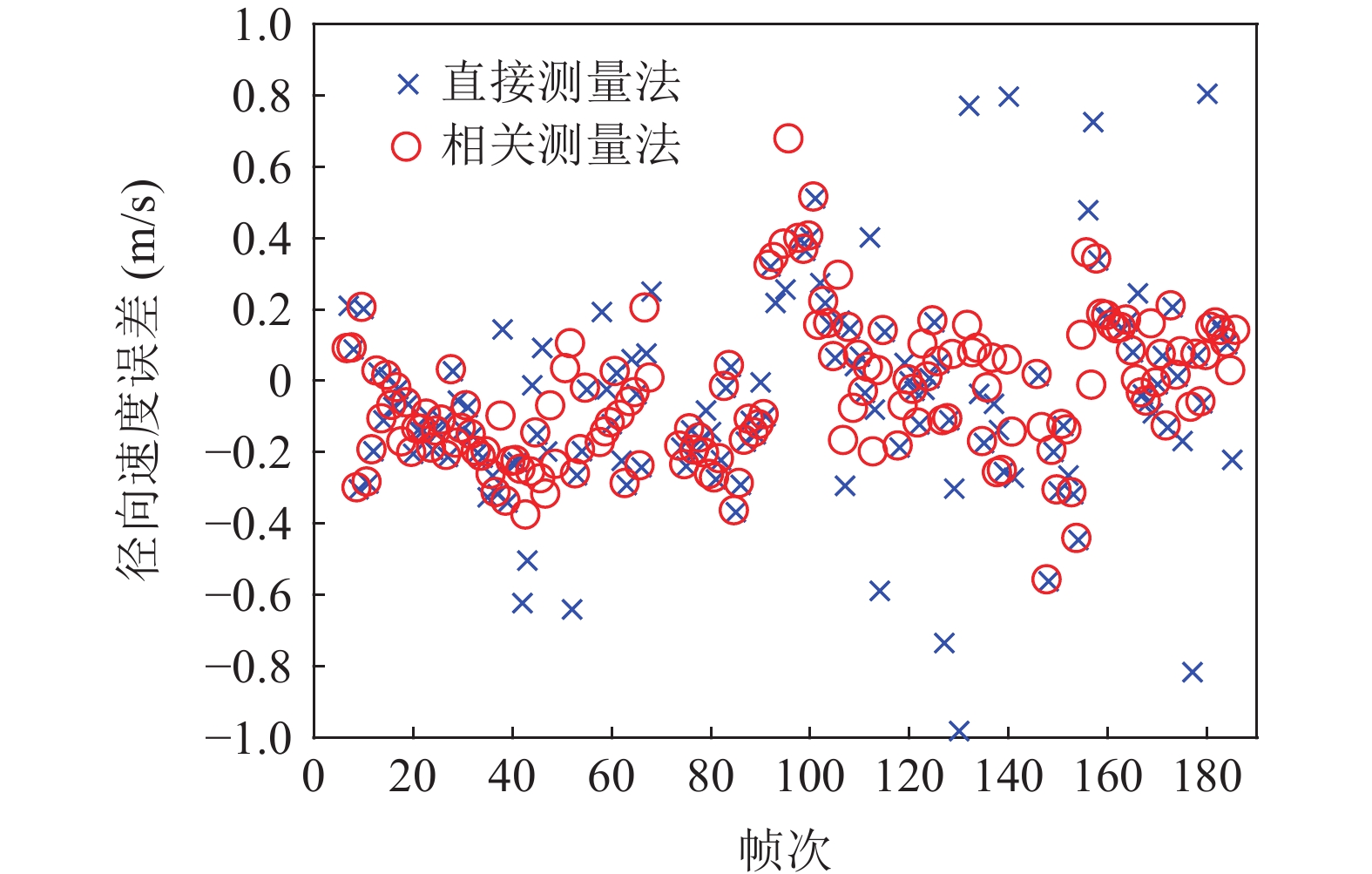
进一步给出直接测量法与相关测量法的多帧目标径向速度估计比较, 如图20所示。直接测量法与相关测量法的目标径向速度估计误差, 如图21所示。同时, 对连续多帧目标径向速度估计结果进行统计, 基于直接测量法的目标径向测速误差标准差为2.55 m/s, 基于相关测量法的目标径向测速误差标准差为0.59 m/s; 若去除其中误差大于1 m/s的估计样本点, 基于直接测量法的目标径向测速误差标准差为0.27 m/s, 基于相关测量法的目标径向测速误差标准差为0.19 m/s。通过图20、图21以及误差标准差统计值的比较可知, 相关测量法可较大程度地减少目标径向速度估计的大偏差, 并可在一定程度上减少随机误差。
(3)目标测距去偏
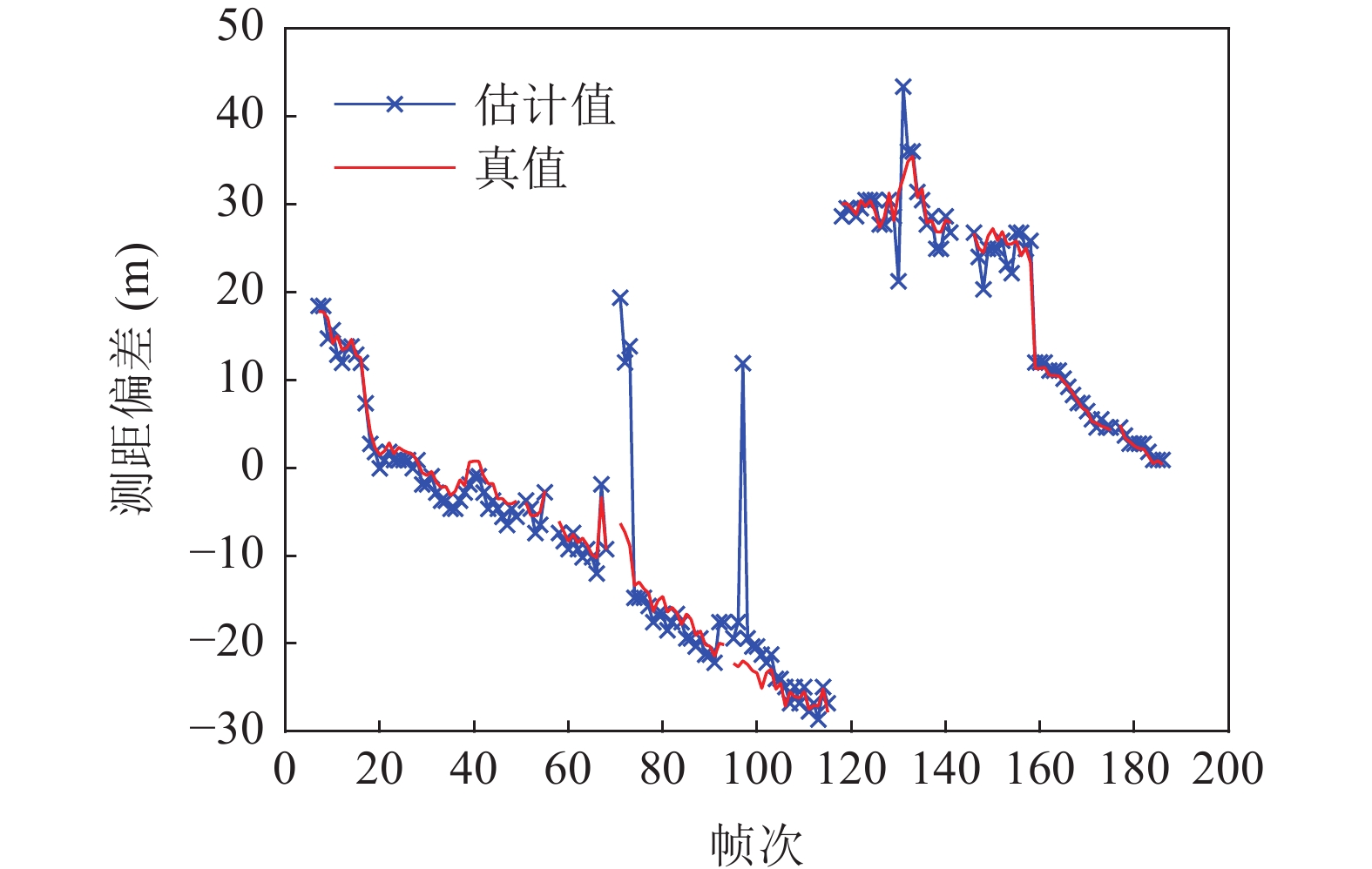
根据相关测量法得到的目标径向速度以及已知的声呐运动信息, 可给出HFM信号探测的目标测距偏差估计值, 如图22蓝色叉线所示。根据声呐与目标的真实相对速度计算得到的目标测距偏差真值如图22红色实线所示。由图可见, 利用组合HFM信号可有效修正有源声呐HFM信号探测中的目标距离偏差。
(4)去除试验目标的有效测点径向速度测量分布特性统计
组合HFM信号探测中, HFM+信号回声与HFM−信号回声同时关联存在的测点, 记为有效测点。由噪声等引起的随机性杂波通常不太会同时被HFM+信号回声与HFM−信号回声关联检测到, 可认为有效测点主要是由非随机性的杂波(如海底固定物引起)和目标组成。浅海有源声呐探测的非随机性杂波个数往往远多于目标, 有效测点(去除试验目标)的径向速度测量分布特性统计可近似表征组合HFM信号对非随机性杂波的径向速度测量特性。
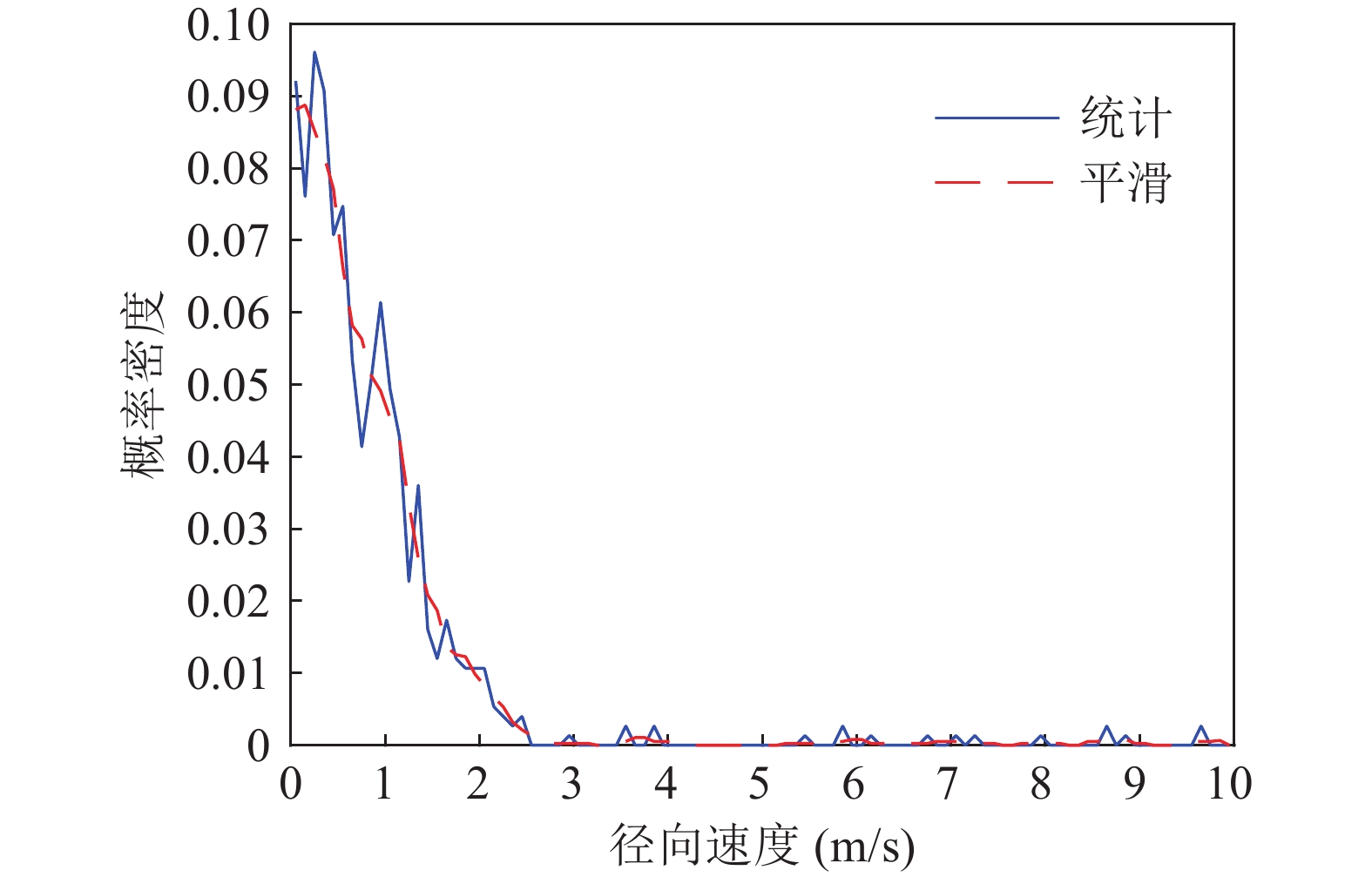
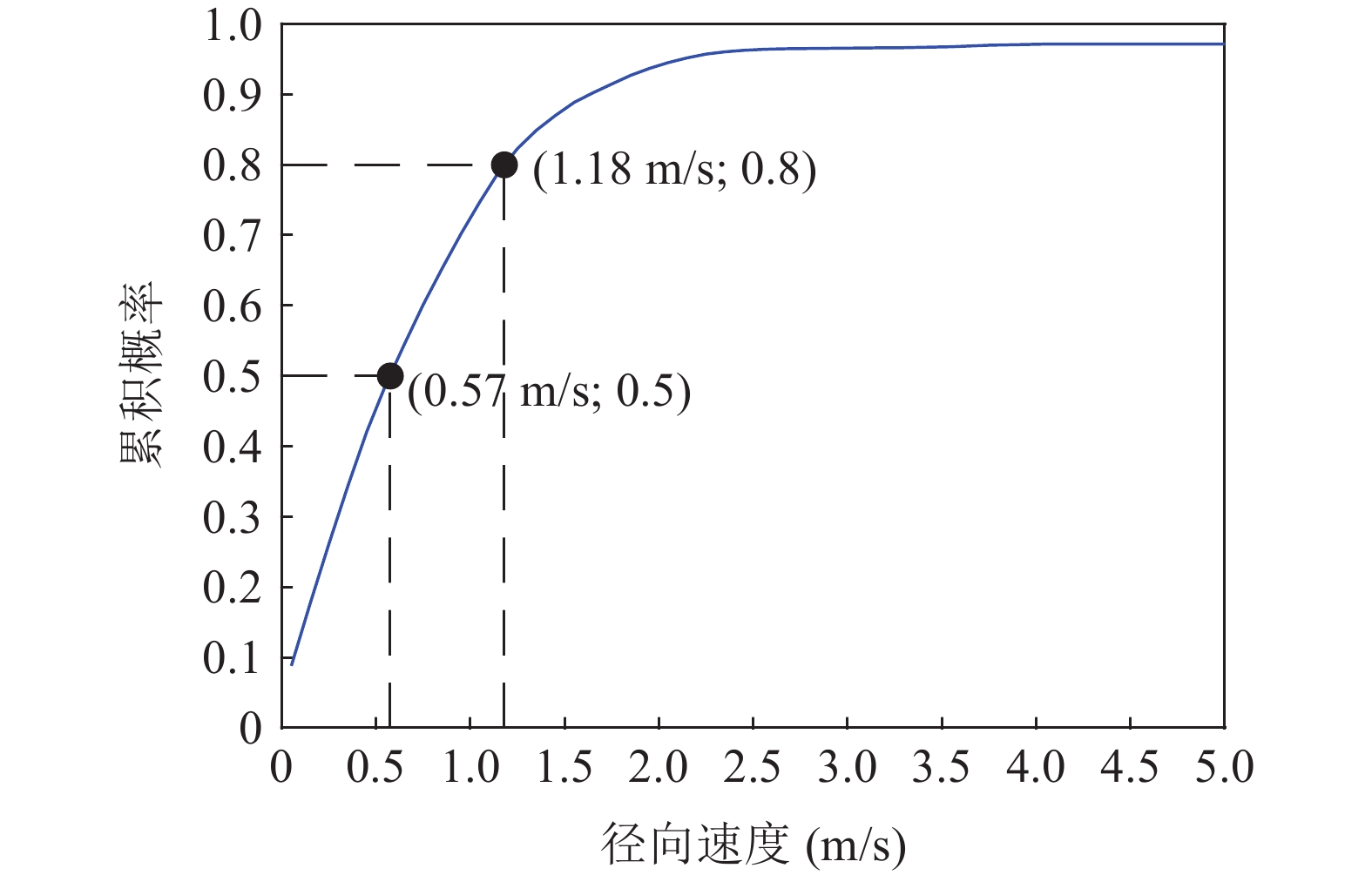
有效测点(去除试验目标)径向速度测量的统计概率密度曲线如图23所示, 其中蓝色实线为概率密度的统计曲线, 红色虚线为概率密度统计的平滑曲线。根据平滑的概率密度曲线, 得到有效测点(去除试验目标)径向速度测量的累积概率曲线, 如图24所示。由图可见, 50%的有效测点径向速度估计值小于0.57 m/s, 80%的有效测点径向速度估计值小于1.18 m/s, 这有助于分离杂波与运动目标。
-
基于HFM信号的多普勒不变性和测距偏差原理, 通过HFM−信号与HFM+信号组合的发射方式, 实现了利用多普勒不敏感信号对目标径向速度的单帧测定, 并且修正了HFM信号的目标距离测量偏差。组合HFM信号测速的误差特性分析与数值仿真结果表明, 相较于HFM++HFM−的信号组合, HFM−+HFM+有利于实现更小的目标径向速度估计误差; 目标回波多亮点强度起伏影响较大时, 100~800 Hz的常用信号带宽范围内, 较小的信号带宽能够获得更准确的径向速度测量结果。海试数据处理结果验证了利用组合HFM信号的目标径向速度测量与测距去偏方法的有效性, 同时表明利用回声强度波形的相关处理可提升目标径向速度的测量精度。
利用组合双曲调频信号的目标径向速度测量与测距去偏
Radial velocity and range bias estimation using composite hyperbolic frequency-modulated signals
-
摘要: 为测定有源声呐运动目标的径向速度, 提出了利用组合双曲调频信号的目标径向速度测量与测距去偏方法。分析了实数域双曲调频信号的多普勒不变性和目标测距偏差原理, 给出了组合双曲调频信号的目标径向速度测量与测距去偏差的实现表示式, 并研究了目标回波多亮点强度起伏背景下的组合双曲调频信号目标径向速度测量误差特性。通过对信号组合方式、信号带宽的选择以及对回波强度波形的相关处理, 可提升目标径向速度的测量精度。数值仿真与海试数据分析结果表明, 该方法可准确地实现对目标径向速度的单帧测定和对目标测距偏差的修正, 有效支持了对目标动静的判断。Abstract: To measure the radial velocity of moving targets in active sonar, a method of radial velocity and range bias estimation using composite hyperbolic frequency-modulated (HFM) signals is proposed. Doppler-invariant property and target ranging bias principles of HFM signals in real domain are analyzed, the realization expression of target radial velocity estimate and range bias removal with composite HFM signals is given, and the error characteristics of target radial velocity measurement under the background of multi-bright spot intensity fluctuation of target echo are studied. The measurement accuracy of the target radial velocity can be improved through the selection of the signal composite forms, the signal bandwidth and the correlation processing of the echo intensity waveform. Numerical simulation and sea trial data analysis results show that the proposed method can accurately measure the radial velocity of target in a single frame and correct the target ranging bias, which effectively supports the judgment of moving target.
-
Key words:
- Hyperbolic frequency modulation /
- Doppler-invariant property .
-

-
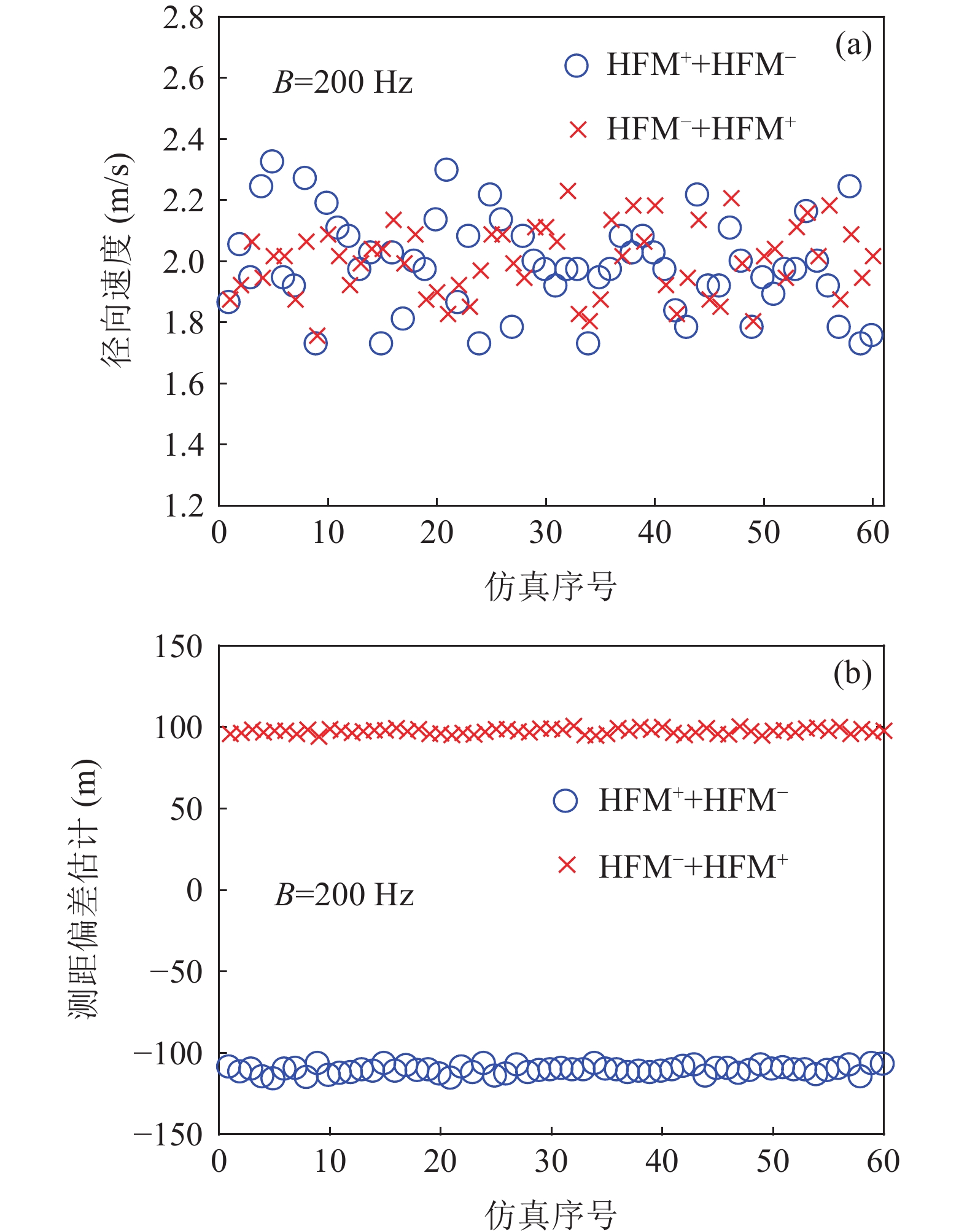
图 14 回声匹配峰值位置在10 m尺度内随机均匀变化时两种HFM信号组合形式下的径向速度测量和测距偏差估计(B=200 Hz) (a) 径向速度测量; (b) 测距偏差估计
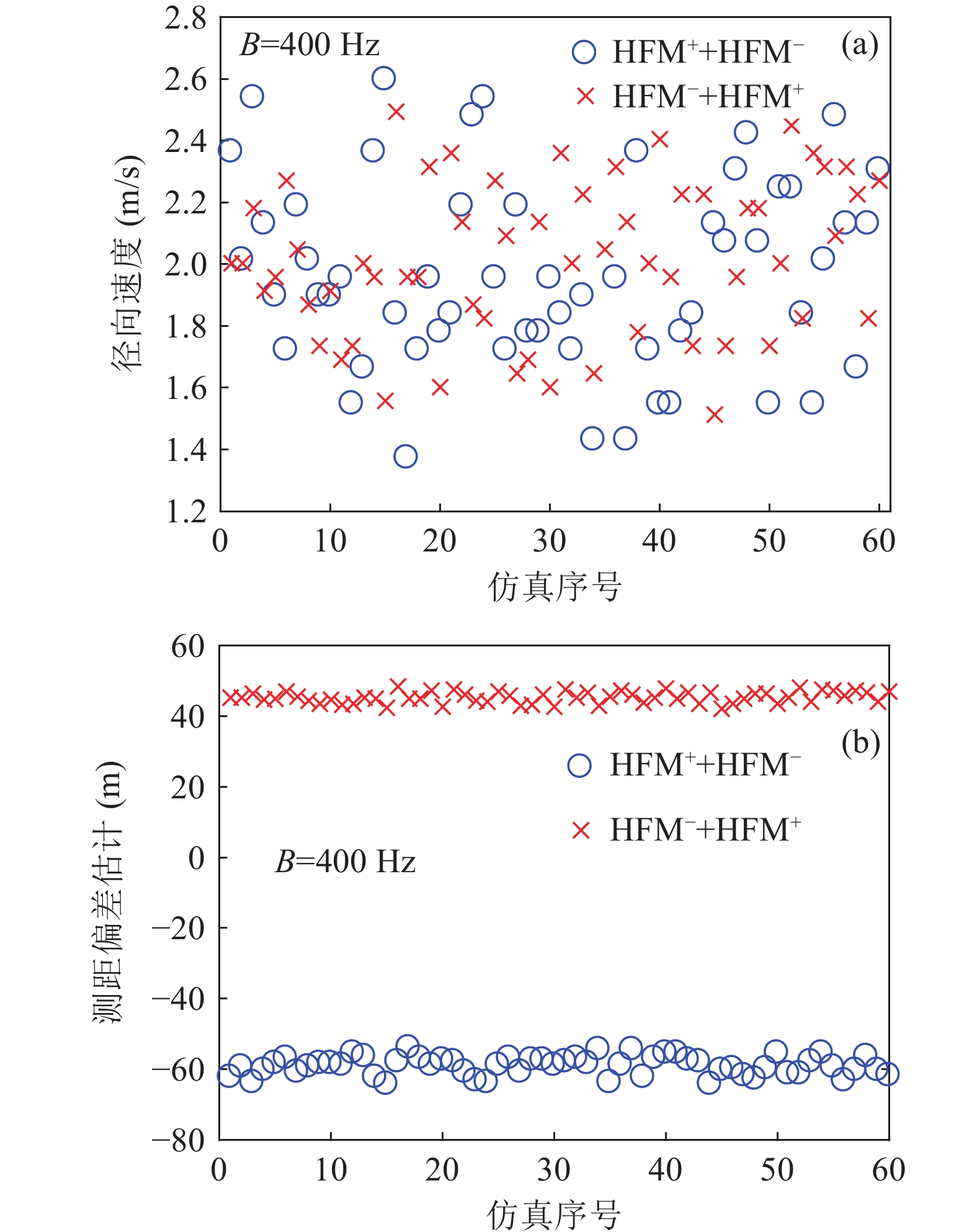
图 15 回声匹配峰值位置在10 m尺度内随机均匀变化时两种HFM信号组合形式下的径向速度测量和测距偏差估计(B = 400 Hz) (a) 径向速度测量; (b) 测距偏差估计
表 1 利用蒙特卡罗仿真结果统计的目标径向速度测量与测距偏差估计精度
组合形式 带宽 $ B = 200 $ Hz

带宽 $ B = 400 $ Hz

测速标准
差 (m/s)测距偏差的
标准差 (m)测速标准
差 (m/s)测距偏差的
标准差 (m)HFM++HFM− 0.149 2.36 0.320 2.66 HFM−+HFM+ 0.126 1.82 0.237 1.51  下载: 导出CSV
下载: 导出CSV
-
[1] 徐文, 鄢社锋, 季飞, 等. 海洋信息获取、传输、处理及融合前沿研究评述. 中国科学: 信息科学, 2016; 46(8): 1053−1085 doi: 10.1360/N112016-00064 [2] 吴金荣, 彭大勇, 张建兰. 海洋混响特性研究. 物理, 2014; 43(11): 732−739 doi: 10.7693/wl20141104 [3] Joseph M F, Roger C G. Methods for identifying and controlling sonar clutter. IEEE J. Oceanic Eng., 2010; 35(2): 330−354 doi: 10.1109/JOE.2010.2044912 [4] Kalman R E. A new approach to linear filtering and prediction problems. J. Basic Eng., 1960; 82(1): 35−45 doi: 10.1115/1.3662552 [5] Joost H V, Robert H J, Gmelig M. Maximum likelihood estimation for long-range target tracking using passive sonar measurement. IEEE Trans. Signal Process., 1992; 40(5): 1216−1225 doi: 10.1109/78.134483 [6] Bar-shalom Y, Ese E. Tracking in a cluttered environment with probabilistic data association. Automatica, 1975; 11(5): 451−460 doi: 10.1016/0005-1098(75)90021-7 [7] Blackman S S. Multiple hypothesis tracking for multiple target tracking. IEEE Aeros. Electron. Syst. Mag., 2004; 19(1): 5−18 doi: 10.1109/MAES.2004.1263228 [8] Mahler R. PHD filters of higher order in target number. IEEE Trans. Aeros. Electron. Syst., 2007; 43(4): 1523−1543 doi: 10.1109/TAES.2007.4441756 [9] Ba N V, Ba T V, Hoang H G. An efficient implementation of the generalized labeled multi-bernoulli filter. IEEE Trans. Signal Process., 2017; 65(8): 1975−1987 doi: 10.1109/TSP.2016.2641392 [10] Sun X, Li R W, Zhou L S. Multidimensional information fusion in active sonar via the generalized labeled multi-bernoulli filter. IEEE Access, 2020; 8: 1335−1347 doi: 10.1109/ACCESS.2020.3039347 [11] Alabaster C. Pulse Doppler radar: Principle, technology, applications. SciTech Publishing, 2012 [12] 田坦. 声呐技术. 哈尔滨: 哈尔滨工程大学出版社, 2009 [13] Lee S, Lim J. Reverberation suppression using non-negative matrix factorization to detection low-Doppler target with continuous wave active sonar. EURASIP J. Adv. Signal Process., 2019; 11: 1−18 doi: 10.1186/s13634-019-0608-6 [14] Doisy Y, Deruaz L, Beerens S P, et al. Target Doppler estimation using wideband frequency modulated signals. IEEE Trans. Signal Process., 2000; 48(5): 1213−1224 doi: 10.1109/78.839970 [15] Yang T C, Schindall J. Clutter reduction using Doppler sonar in a harbor environment. J. Acoust. Soc. Am., 2012; 132(5): 3053−3067 doi: 10.1121/1.4756921 [16] 孙大军, 侯开阳, 腾婷婷, 等. 空时多普勒频移域运动小目标的抗干扰探测方法. 声学学报, 2022; 47(2): 161−174 doi: 10.15949/j.cnki.0371-0025.2022.02.006 [17] 周增胜, 杜选民. 利用正弦调频信号的宽带速度敏感特性抑制混响. 声学学报, 2022; 47(1): 16−26 doi: 10.15949/j.cnki.0371-0025.2022.01.002 [18] 薛城, 顾怡鸣, 宫在晓, 等. 宽带双曲调频信号参数化时频分析波达方向估计. 声学学报, 2023; 48(1): 27−40 doi: 10.15949/j.cnki.0371-0025.2023.01.004 [19] Yang J, SarKar T K. Doppler-invariant property of hyperbolic frequency modulated waveforms. Microw. Opt. Technol. Lett., 2006; 48(6): 1174−1179 doi: 10.1002/mop.21573 [20] Yang J, SarKar T K. Acceleration-invariant of hyperbolic frequency modulated pulse compression. Digital Signal Process., 2008; 18: 228−235 doi: 10.1016/j.dsp.2007.01.005 [21] Song X, Willett P, Zhou S. Range bias modeling for hyperbolic frequency modulated waveforms in target tracking. IEEE J. Oceanic Eng., 2012; 37(4): 670−679 doi: 10.1109/JOE.2012.2206682 [22] 庞玉红, 严琪, 王世闯. 双曲调频信号测速测距方法研究. 声学与电子工程, 2014; 114: 21−24 [23] Wang F Y, Du S P, Sun W, et al. A method of velocity estimation using composite hyperbolic frequency-modulated signals in active sonar. J. Acoust. Soc. Am., 2017; 141(5): 3117−3122 doi: 10.1121/1.4982724 [24] 李启虎. 声呐信号处理引论. 北京: 科学出版社, 2012 [25] Lin Z B. Wideband ambiguity function of broadband signals. J. Acoust. Soc. Am., 1988; 83(6): 2108−2116 doi: 10.1121/1.396391 [26] 盛骤, 谢式千, 潘承毅. 概率论与数理统计. 第4版. 北京: 高等教育出版社, 2008 -
图( 24) 表( 1)
计量
- 文章访问数: 865
- HTML全文浏览数: 865
- PDF下载数: 4
- 施引文献: 0