
 首页
首页 登录
登录 注册
注册



-
水浸超声检测是一种常用的自动化无损检测方法, 主要有完全水浸式和局部喷水式两种形式[1-3]。局部喷水式将超声探头安装于喷头内, 超声波通过射流水柱与工件耦合, 具有配置灵活、检测范围大、避免工件长时间浸泡等优点, 能够满足大型曲面工件自动化检测的需求[4-7]。射流水柱流动状态易受到喷头结构和流速的影响, 存在声耦合稳定性不高的缺点[8]。因此, 开展超声波在射流−工件中传播机制的研究具有重要意义。
周庆祥等设计了一种喇叭+直筒型的喷嘴, 通过实验研究了喷嘴结构、耦合水流速和射水距离对喷水超声检测系统稳定性的影响[9]。范伟诚实验研究了偏转角度、气泡、水浊度等对喷水超声检测灵敏度的影响规律[10]。采用实验方法研究喷水超声检测系统的特性, 受到尺度效应、成本和效率的限制, 建模与仿真成为研究这一问题的有效途径[11-12]。Calmon等提出了Champ-Sons模型计算水浸情况下工件内部的声场, 并开发了CIVA软件[13], Belgroune等用角谱法建立了超声波在液−固分层介质中传播的数学模型[14], Schmerr等用多元高斯声束模型模拟了超声波在液−固界面下的声场分布[15]。上述研究中耦合水是静止状态, 属于静水耦合, 而喷水式超声检测属于“动水”耦合, 水流经过喷嘴以一定的速度喷射到工件表面, 射流水柱的状态受到喷头结构和进水口流速的影响, 层流状态时超声波传播稳定, 而湍流状态会使得噪声增加[16]。超声波的传播速度会随着射流流速改变, 使得超声回波的幅值和相位发生变化。
喷水式超声检测系统建模属于声−流耦合问题, 目前主要采用数值方法对其进行研究, Kierkegaard等通过求解线性化的纳维−斯托克斯方程, 得到管道中流场与声场相互作用的规律[17-18]。Gabard等在线性化欧拉方程中引入源项, 计算了背景流场对声场的影响[19]。Sun等用计算流体动力学(CFD)、波动声学以及射线声学等理论, 分析了换能器附近的涡流流场对声波传播和接收的影响[20]。郭立新等将CFD网格上的温度、气流速度等数据映射到声学网格中, 实现消声器内部的声−流耦合过程, 研究了温度和气体流动对消声器声学性能的影响[21]。明确超声波在射流水柱中传播特性是喷水式超声检测回波分析与缺陷评价的重要前提, 针对喷水式超声检测中流场对超声回波特性影响的研究鲜有报道。
本文对喷水式超声检测系统的声−流耦合进行了建模和实验研究, 分别建立了流体域CFD模型与声场模型, 将CFD计算结果通过网格映射法转移到声学网格作为声场分析的边界条件, 建立超声波在背景流场条件下的传播模型。为了验证模型的正确性, 建立不同流速下的喷水式超声检测的有限元模型, 仿真得到平底孔回波, 对比了仿真回波和实验回波幅值的变化趋势。
-
喷水式超声检测的稳定性与射流水柱的流动状态有关, 而射流水柱的流动状态受到喷头结构、进水口流速等的影响。对流场进行CFD数值仿真, 可以得到喷嘴内部和射流水柱中的湍动能、速度、压力等。流场流动满足质量守恒定律、动量守恒定律和能量守恒定律[22], 在喷水超声检测中, 耦合水与喷头内壁的热交换量较小, 不必考虑能量守恒。
质量守恒方程:
式中,
$ t $ 为时间,$ \rho $ 为流体密度,$ {\boldsymbol{u}} $ 为流体速度矢量。动量守恒方程:
式中,
$ {\boldsymbol{F}} $ 为单位体积的表面张力,$ \sigma = p{\boldsymbol{I}} +{\boldsymbol{ \tau}} $ , 且$ p $ 为流体压力,$ {\boldsymbol{I}} $ 为单位张量,$ {\boldsymbol{\tau}} $ 为黏性应力张量。采用剪切应力传输(Shear Stress Transport, SST)模型对喷头内的流场和射流水柱进行CFD仿真分析[23], 该模型结合了
$ k - \varepsilon $ 模型在边界层外部独立性和近壁面稳定性的特点, 具有适用范围广、计算模拟性能优等优点。因此, 采用SST模型处理不同流速下流场分布具有较好的适用性。SST湍流模型的湍流强度$ k $ 方程和湍流频率$ \omega $ 方程分别为式中,
$ \mu $ 为动力黏性系数,$ {\mu _t} $ 为湍动黏度,$ \alpha $ 为湍动能系数,$ {\sigma _k} $ ,$ {\sigma _\omega } $ 分别为$ k $ 方程和$ \omega $ 方程的湍流能量普朗特数,$ \beta ' $ ,$ \beta $ 分别为$ k $ 方程和$ \omega $ 方程扩散产生的湍动能系数,$ {P_k} $ 为黏性力引起的湍动能项。 -
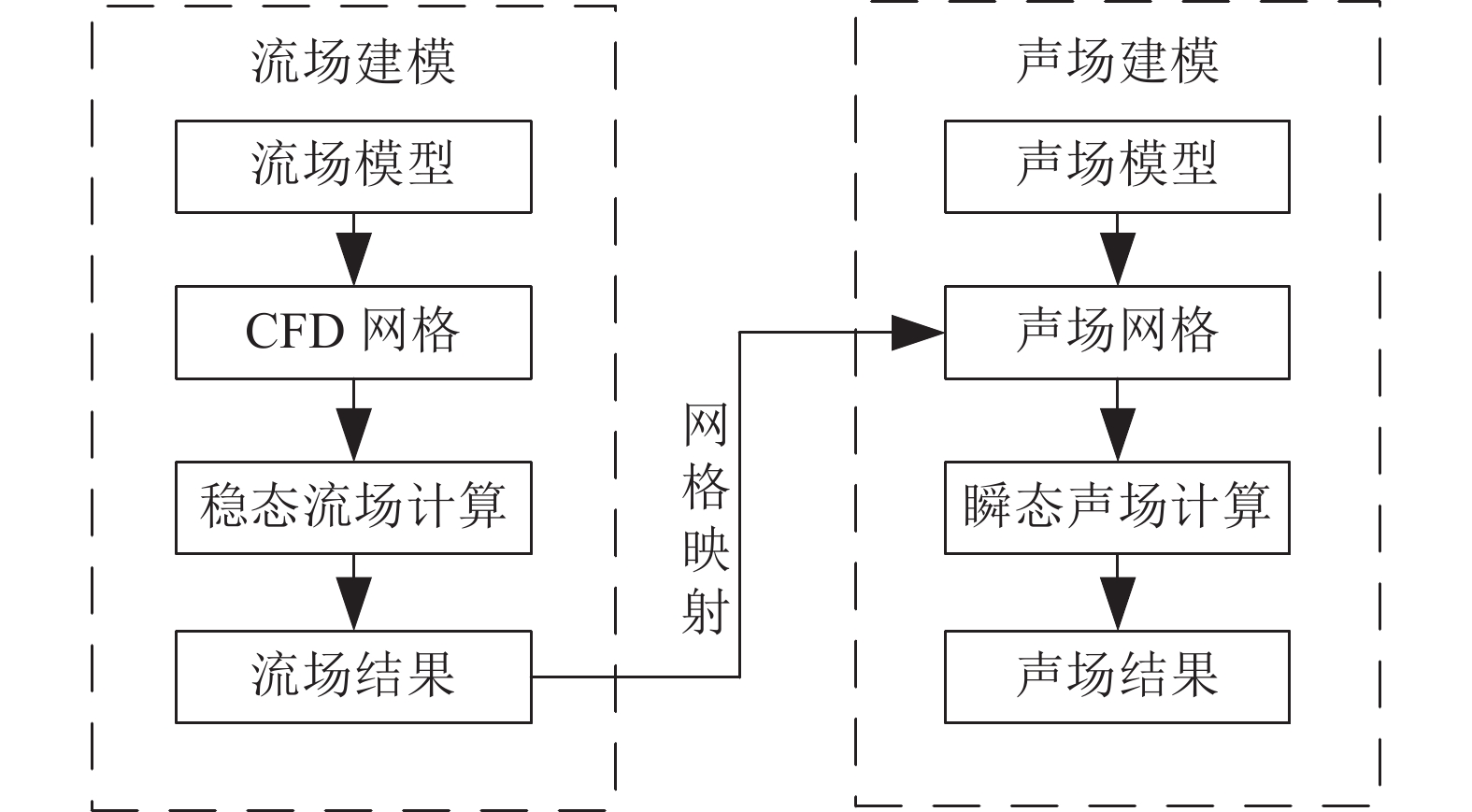
超声波在喷头内部和射流水柱中传播时, 超声波与流场会发生声−流耦合作用, 改变超声波的幅值和相位[24-25], 因此, 在进行喷水超声检测系统建模与仿真时, 需要建立流场和声场之间的耦合关系。本文通过网格映射的方式, 将流场网格节点上的流速、湍流黏度等参数映射到声学网格中, 实现喷水超声检测中的声−流耦合, 建模流程如图1所示。
为满足SST湍流模型计算精度的要求, 在流场计算中对流体域壁面处进行网格加密处理, 确保喷头流道壁面处第一层网格
$ {y^ + } $ 值小于5[26]。而声学计算中, 计算精度受到多数网格单元的控制, 细分局部网格并不能提高计算精度, 应使单元大小尽量一致, 保证网格尺寸一般不大于1/10波长。声场网格和流场网格在节点和单元密度上存在差异, 因此需要定义两网格间的映射关系, 利用弱形式偏微分方程建立声场和流场网格间的映射关系:式中,
$ \delta $ 为扩散量,$ h $ 为网格大小,$ {\mu _{t,{\rm aco}}} $ ,$ {p_{\rm aco}} $ ,$ {u_{\rm aco}} $ 分别为声学网格中的湍流黏度、压力和速度分量。 -
CFD计算结果映射到声学网格后, 利用线性纳维−斯托克斯方程(LNS方程)求解稳态等温背景流下由压力和速度引起的声学变化。LNS方程来源于流体方程, 在流动方程的基础上对声学问题进行微小扰动假设, 假设压力
$ p\left( {x,t} \right) $ 、密度$ \rho \left( {x,t} \right) $ 、速度$ u\left( {x,t} \right) $ 等变量由平均值$ \left(\overline{p}, \; \overline{\rho }, \;\overline{u}\right) $ 和波动值$ \left({p}^{\prime },\; {\rho }^{\prime },\; {u}^{\prime }\right) $ 组成, 即将添加波动值后的压力
$ p\left( {x,t} \right) $ 、密度$ \rho \left( {x,t} \right) $ 、速度$ u\left( {x,t} \right) $ 等代入流动控制方程, 得到LNS方程。在LNS方程的基础上忽略热量损失的影响, 相当于由压力、速度和密度定义的稳态背景流场的一阶扰动方程, 由此可推导出描述压力、速度的微小扰动传播的控制方程:式中,
$ {\rho _0} $ 和$ {{\boldsymbol{u}}_0} $ 分别表示背景场中的密度和流速,$ M $ 和$ {\boldsymbol{F}} $ 表示可能的源项。 -
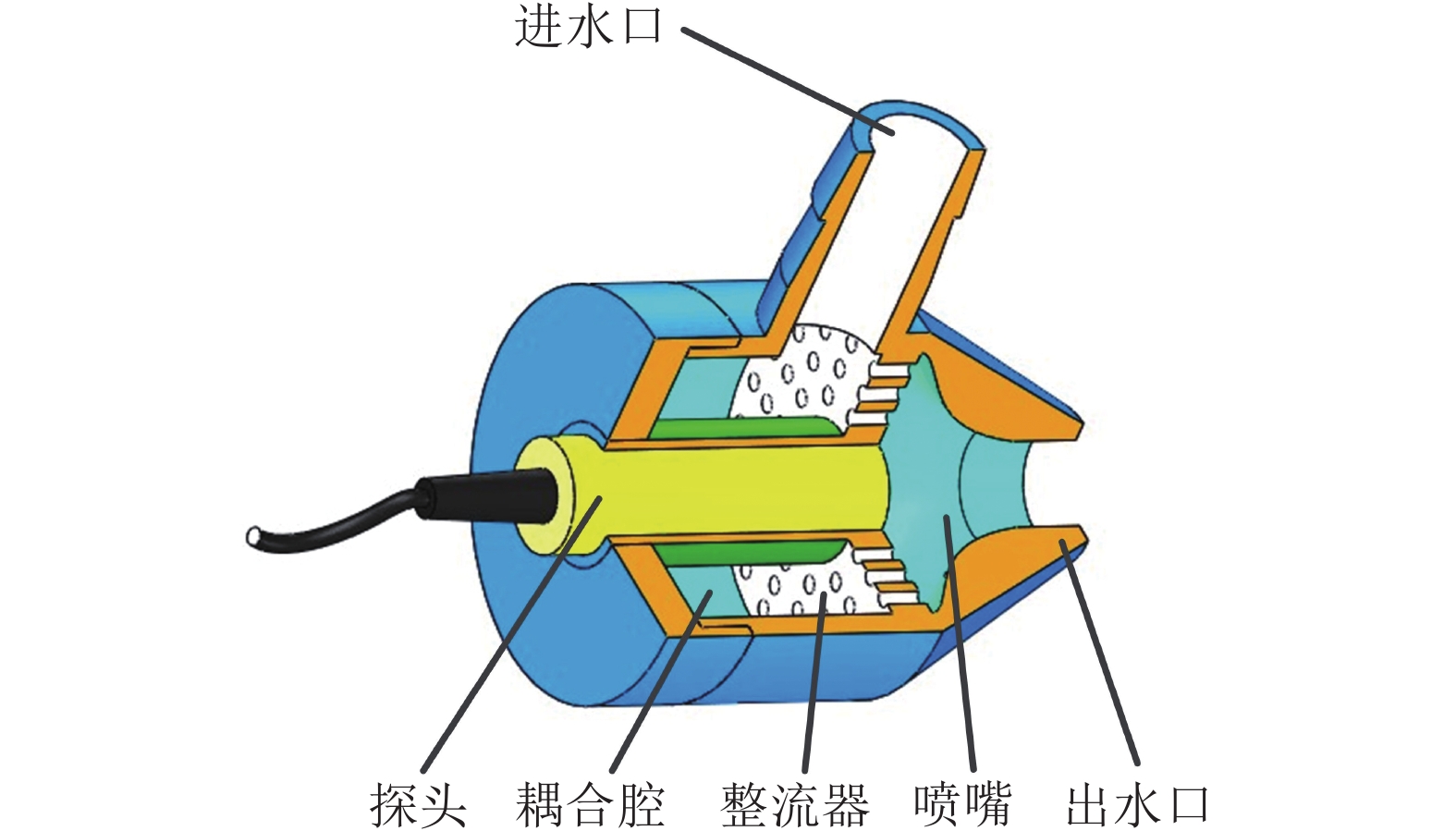
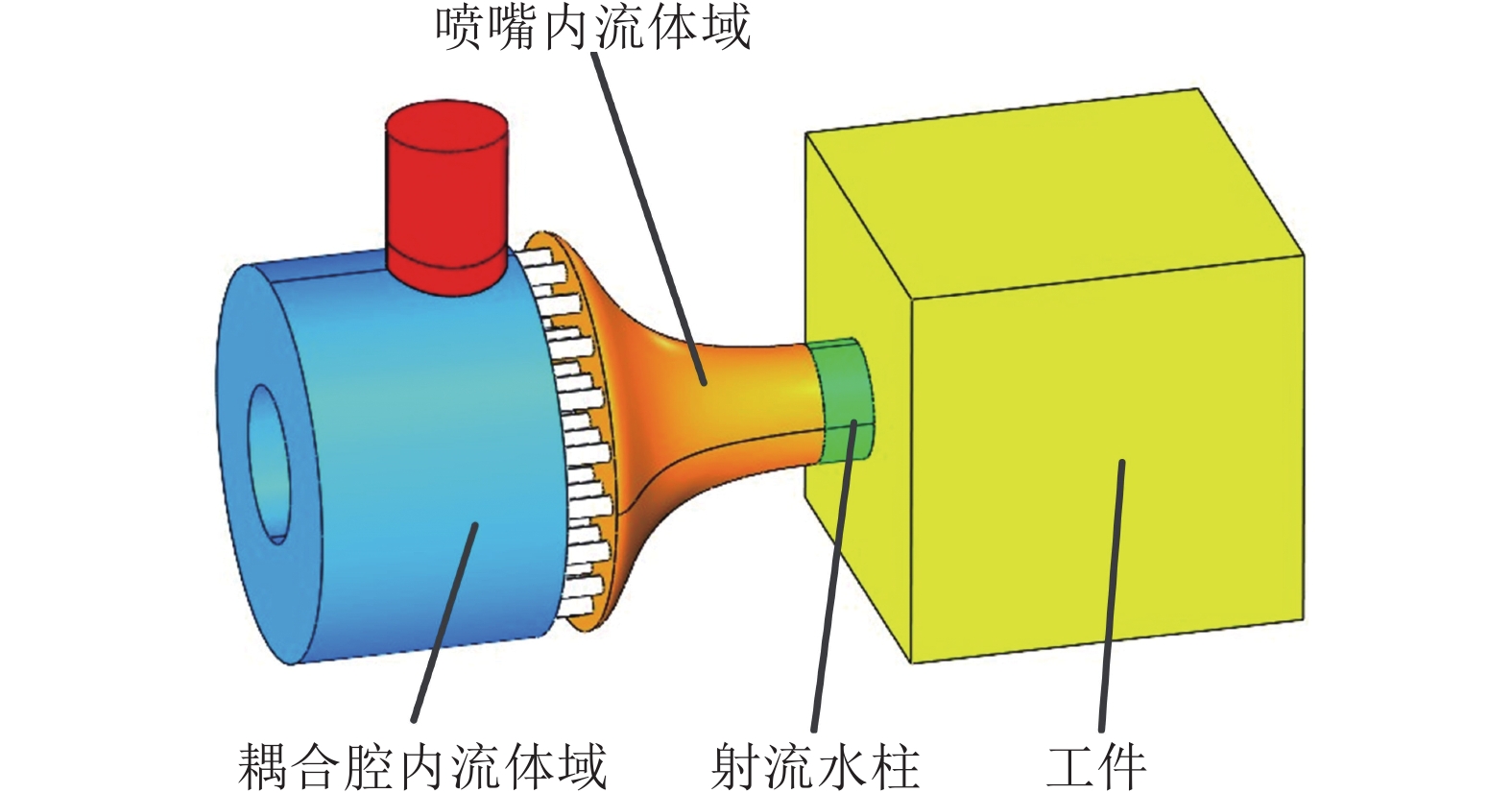
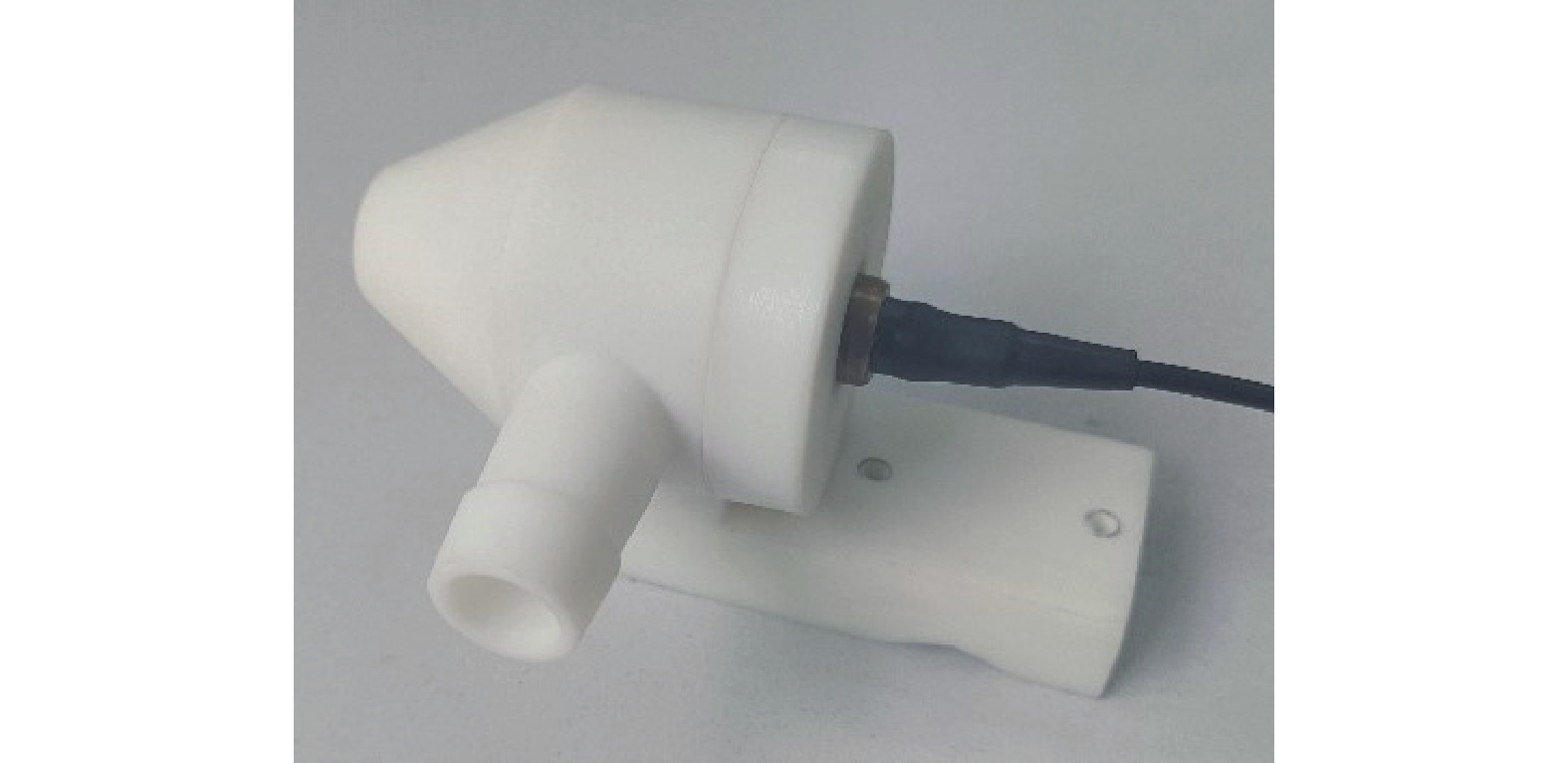
喷水超声探头结构如图2所示, 水浸超声探头安装在喷头内, 喷头主要由进水口、耦合腔、整流器和喷嘴组成, 锥形喷嘴以维多辛斯基曲线作为流道型线[27]。采用进水口垂直式水路设计, 耦合水经过整流器整流后在出水口处形成稳定的射流水柱, 超声波通过射流水柱进入工件内部。
-
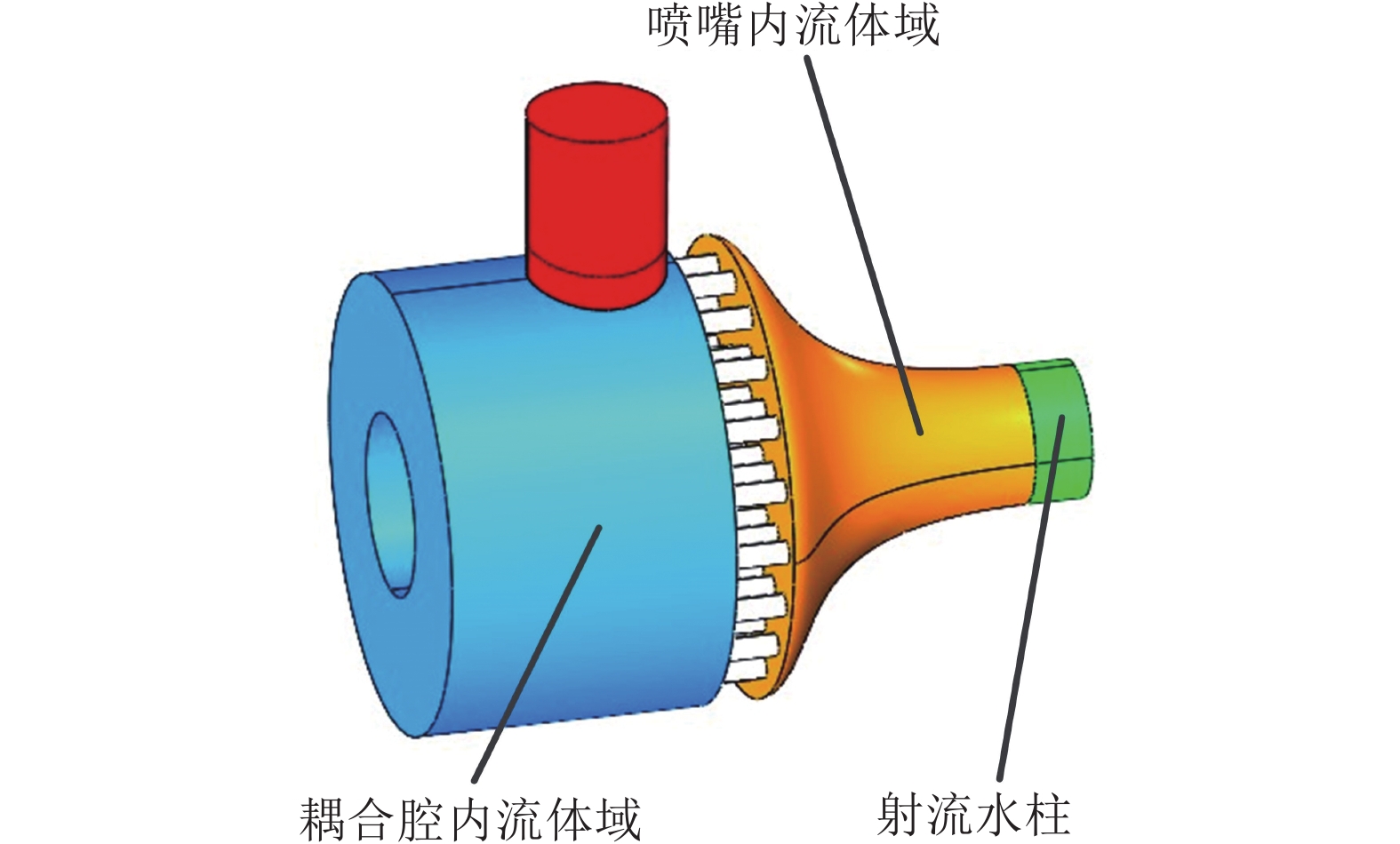
当射流水柱喷射方向水平时, 水柱在重力作用下做平抛运动, 导致反射回波不能被探头正常接收。 设射流距离为5 mm, 为使射流水柱偏移量小于1 mm, 需控制进水口流量大于2 L/min。根据图2所示的喷水式超声探头结构, 用COMSOL Multiphysics建立喷嘴内部流体域模型, 并在喷嘴流体域的基础上添加5 mm的射流水柱, 得到喷水式超声检测流场仿真模型, 如图3所示。进水口采用流量入口边界条件, 进水流量为6 L/min; 喷嘴出水口采用压力出口边界条件, 出口处相对于大气的参考压力为0; 喷嘴壁面设置为静止、无滑移边界条件。
-
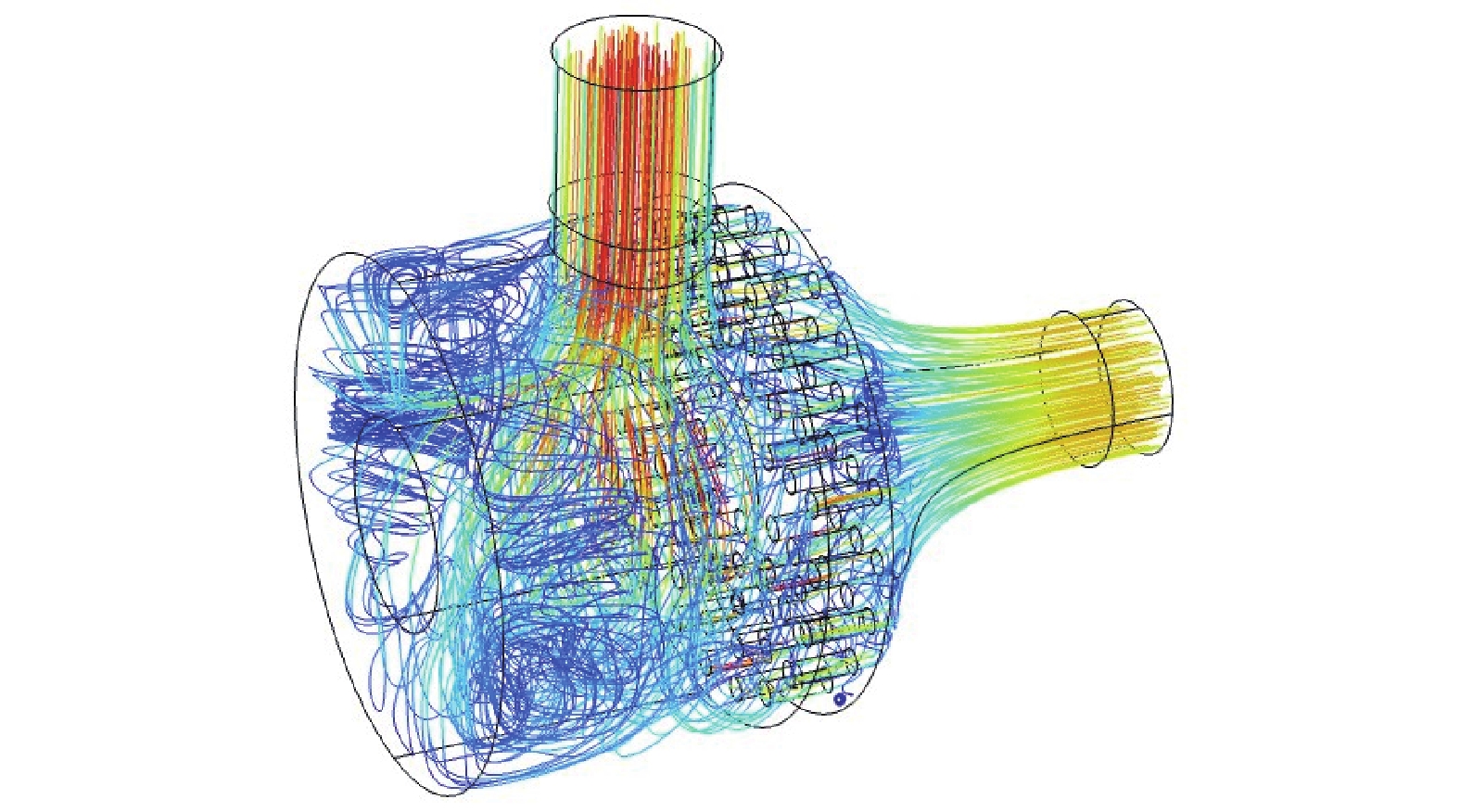
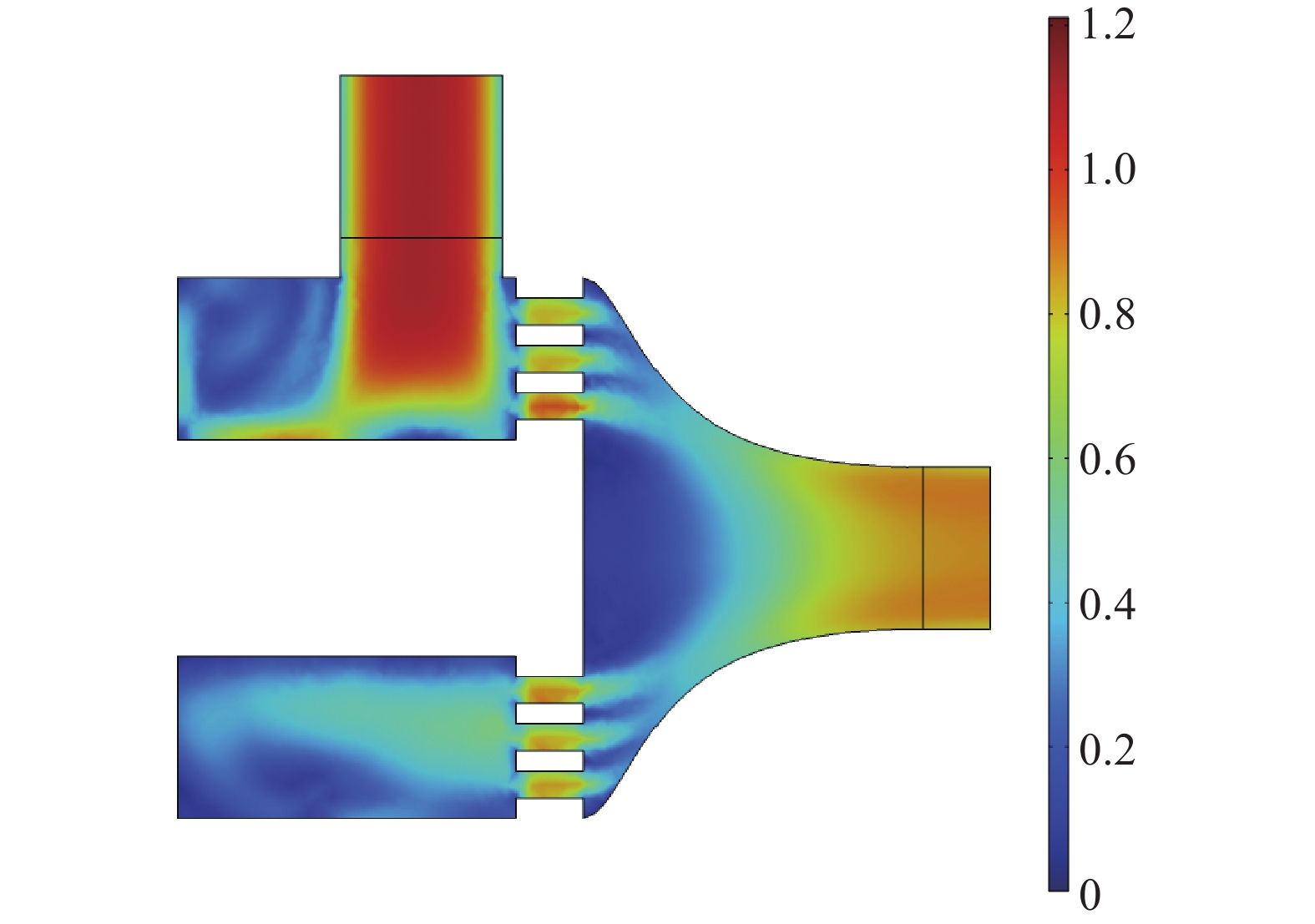
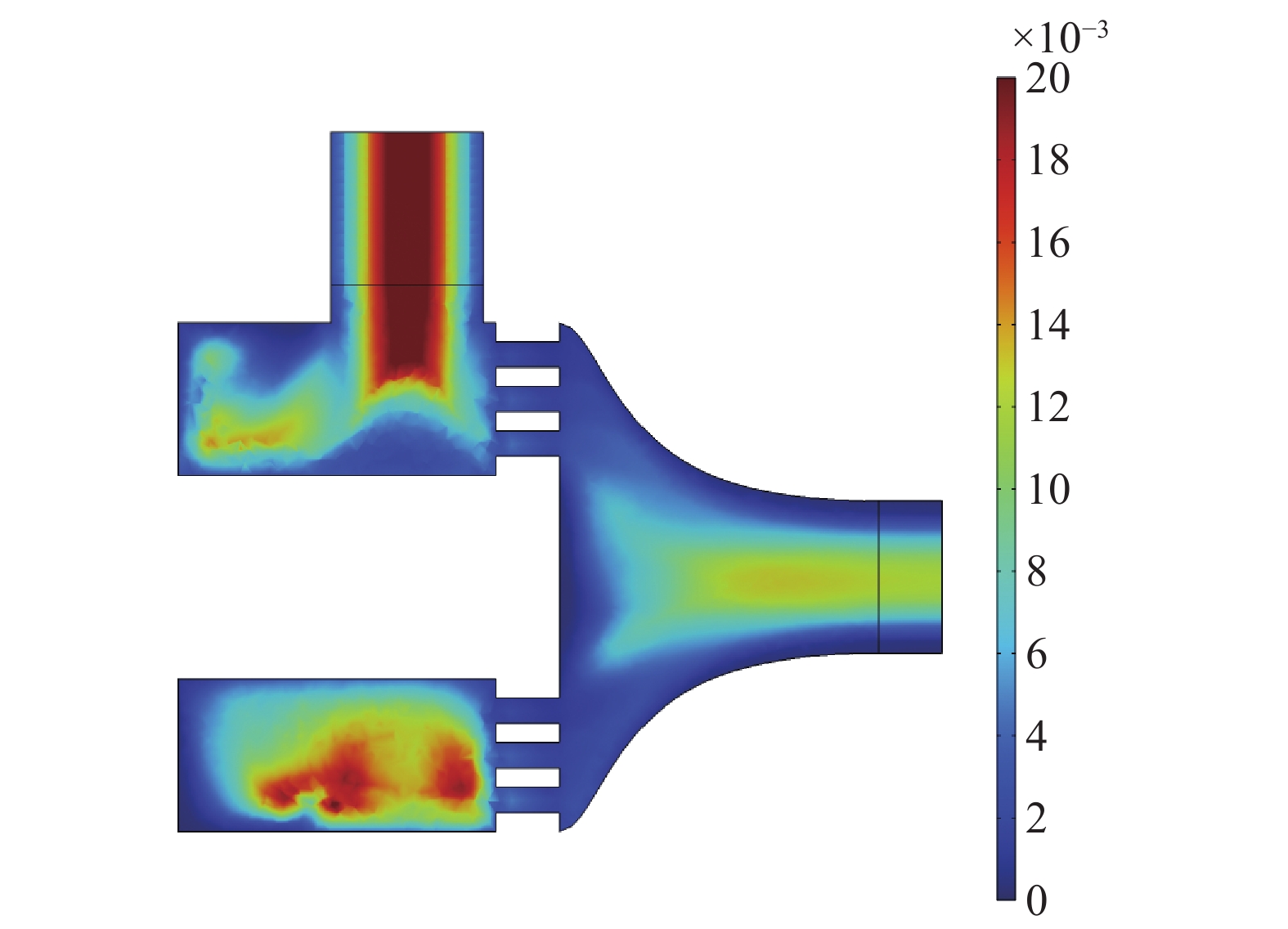
图4为流体域的三维流线图, 图5为流体域轴向截面的速度分布图, 耦合水从进水口进入耦合腔后, 受到耦合腔结构的影响, 流线呈现出不规则、紊乱的状态, 耦合腔内形成了漩涡区。耦合水经过整流器进入喷嘴后, 在整流器的作用下, 喷嘴内流线变得整齐有序; 由于喷嘴的流道型线采用以维多辛斯基曲线为基础的曲线设计, 沿着水流方向流通截面变小,使进入喷嘴收缩处的水流横向压力梯度和径向分速度逐渐减小, 流速变化趋缓, 在出水口处形成稳定的射流。图6为湍流黏度分布图, 耦合腔内湍流黏度变化复杂, 经过整流器后, 喷嘴内的湍流黏度变小。
-
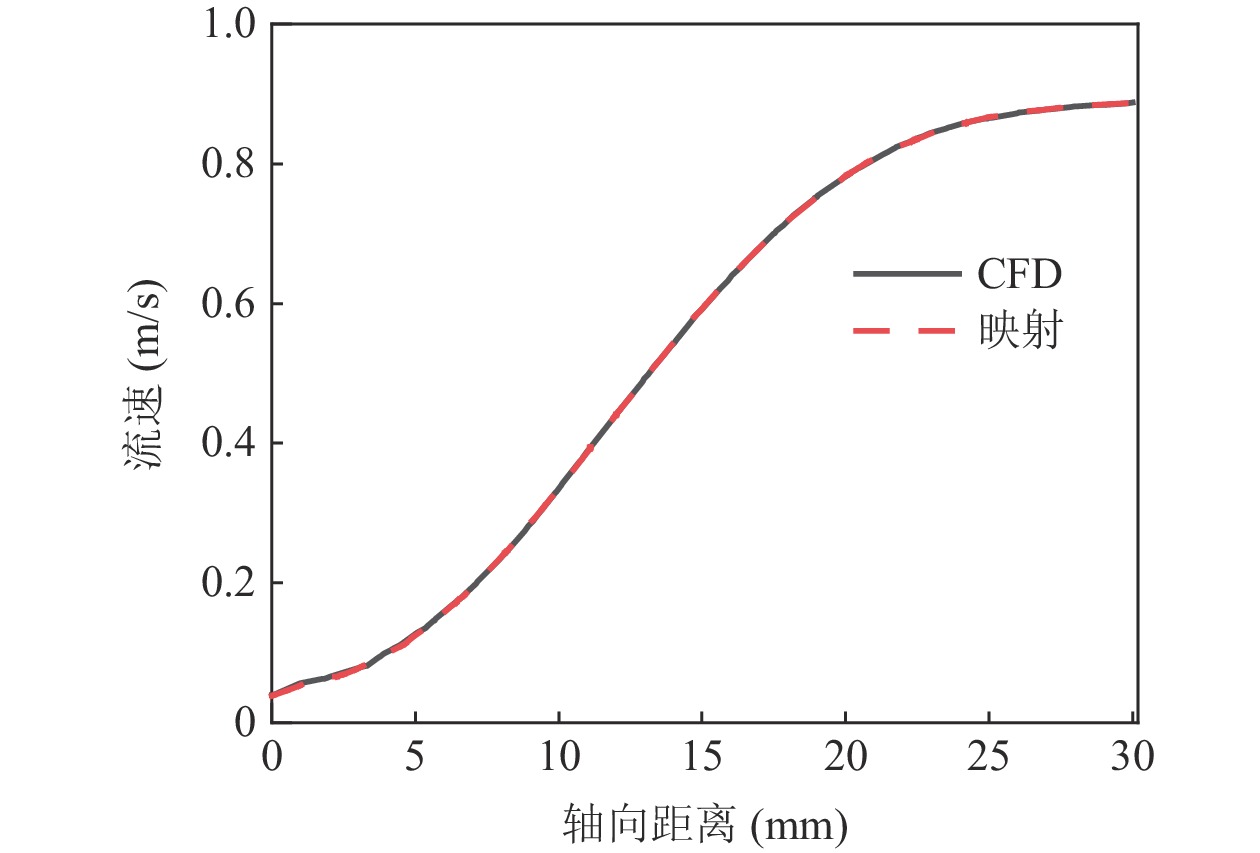
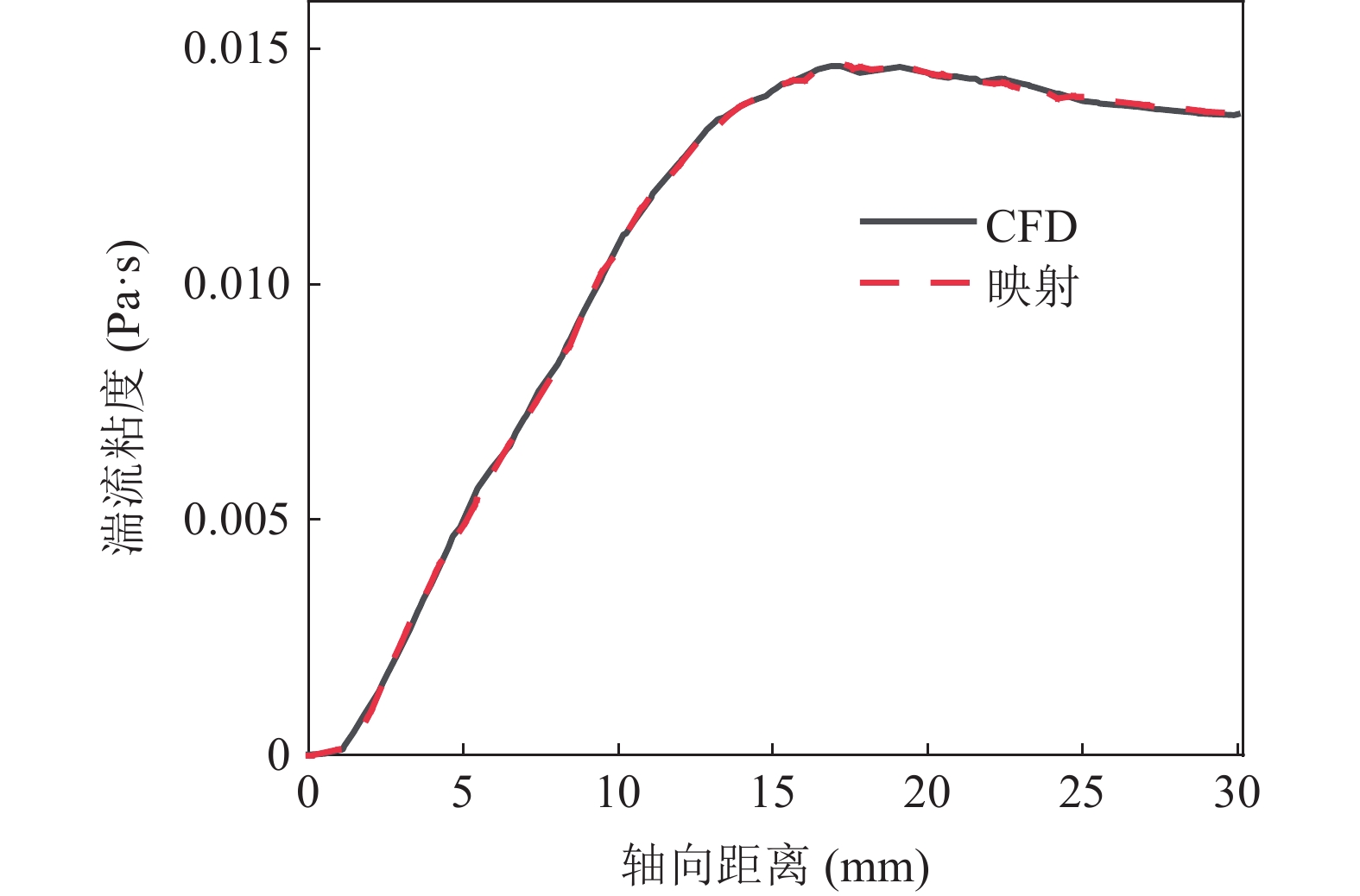
在求得稳态背景流场后, 利用弱形式偏微分方程(式(5)—式(7))将流速、压力和湍流黏度映射至声场网格, 为验证映射结果的准确性, 提取映射前后探头声轴线上各网格点的流速和湍流黏度进行对比, 如图7和图8所示, 映射到声场网格上的结果与CFD计算的结果是一致的。
-
在流场仿真模型的基础上添加厚度为40 mm工件, 建立如图9所示的喷水式超声检测系统的有限元模型, 材料参数见表1。通过求解线性纳维−斯托克斯方程得到超声波在流场中的传播过程, 以气动声学−结构边界分割流体域和固体域, 以固体力学模块模拟超声波在工件内传播。为了保证有限元计算的精度, 网格尺寸一般小于波长的1/10, 超声波频率为2.5 MHz时, 水中波长为0.6 mm, 工件中波长为2.4 mm, 因此, 设置流体域网格尺寸为0.05 mm, 工件网格尺寸为0.23 mm, 网格划分为自由四面体网格。在喷水式超声检测模型中, 通过在平面上加载法向位移边界条件模拟超声波的激励, 边界加载信号采用了Gabor函数类型:
式中,
$ A $ 为信号归一化幅值,$ {f_0} $ 为探头中心频率。 -
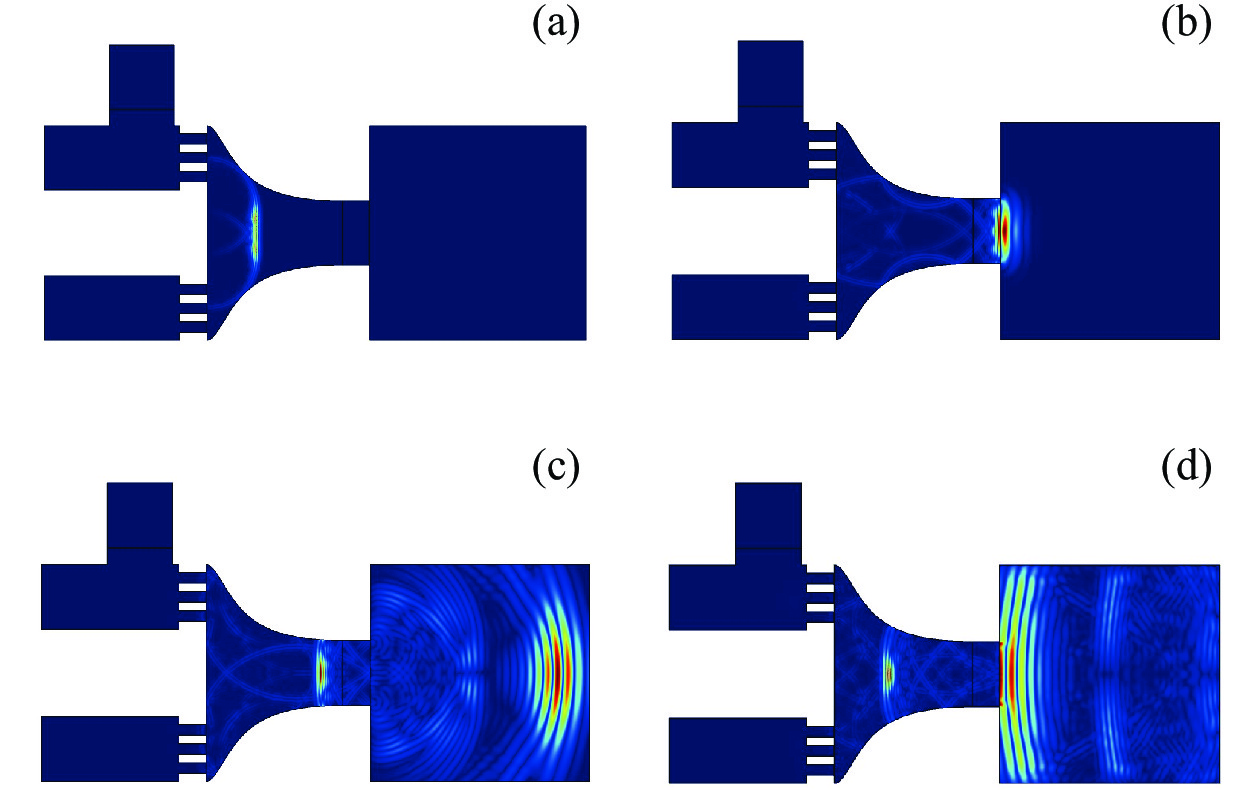
进水口流速为6 L/min时, 超声波在喷嘴、射流水柱和工件中的传播过程如图10所示。图10(a)是t = 7.1 μs时的波场快照图, 超声波在喷嘴内部的流场中向前传播; 图10(b)是t=20.8 μs时的波场快照图, 超声波通过射流水柱入射到工件表面, 一部分透射进入工件内部, 一部分反射回射流水柱, 形成一次界面波; 图10(c)是t = 26.7 μs时的波场快照图, 工件中的超声波到达工件底面, 形成底面回波, 而射流水柱中的一次界面波继续向探头方向传播。图10(d)是t = 33.9 μs时的波场快照图, 底面反射波到达工件表面, 一部分超声波向探头方向传播, 另一部分超声波反射回到工件, 此时, 一次界面波继续向探头方向传播。
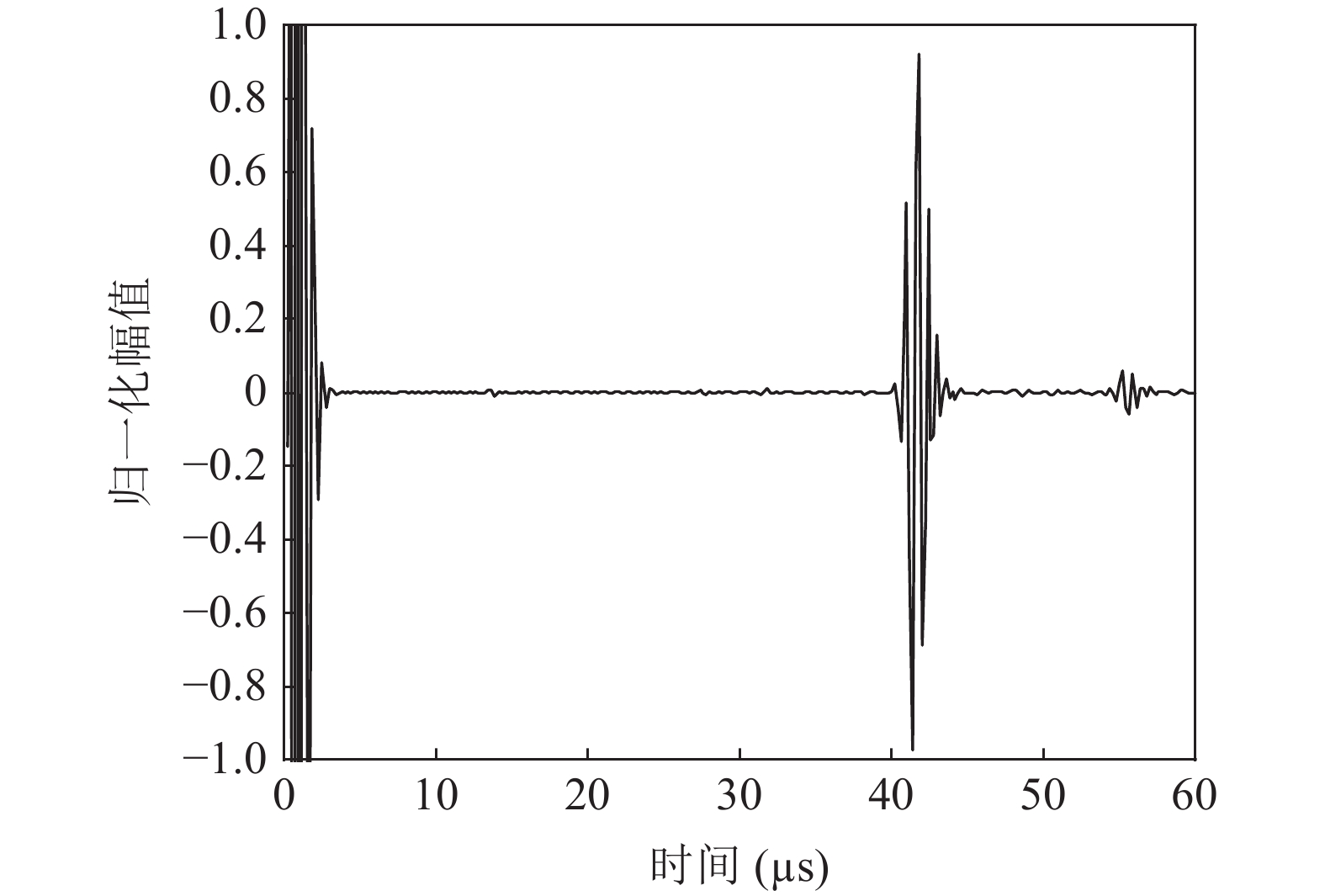
仿真得到的回波信号如图11所示, 回波中有两个波包, 40.0 μs处的波包为在工件表面产生的一次界面波, 53.6 μs处的波包为底面回波。
-
调整流速相当于改变超声波传播的流场条件, 不同的流场条件对超声波的幅值和相位会产生影响。保持射流距离为5 mm, 流速为2 L/min, 6 L/min, 10 L/min, 15 L/min, 分别进行仿真, 得到工件中的声场分布, 如图12所示, 声场分布趋势接近,图12(e)为四种流速下声轴线上的声压曲线, 随着流速的增大, 声轴线上声压减小。
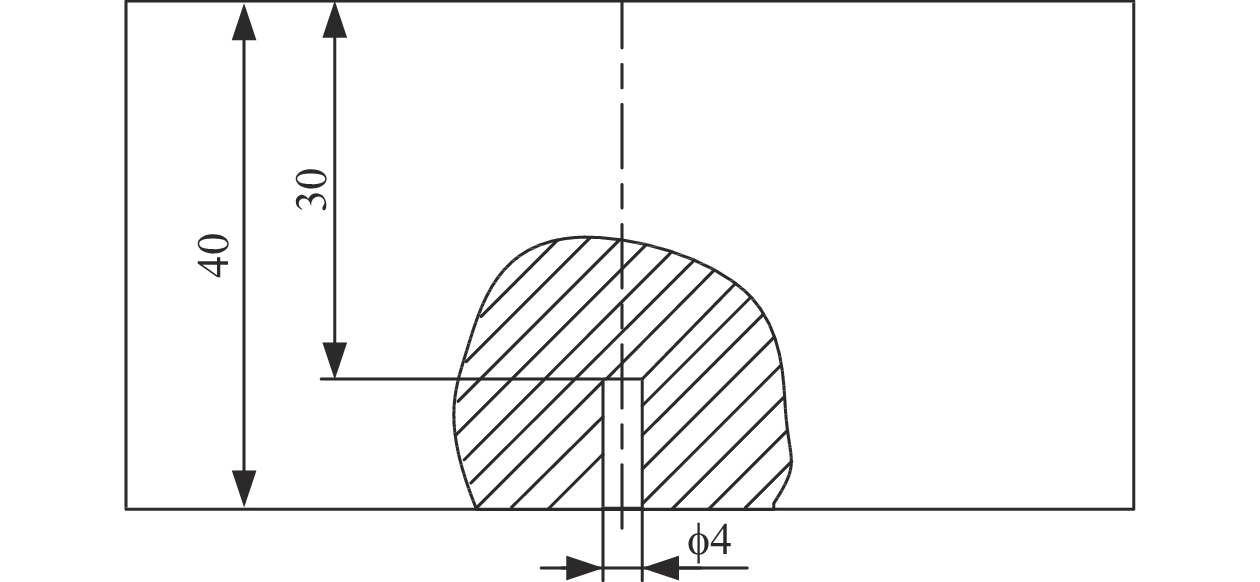
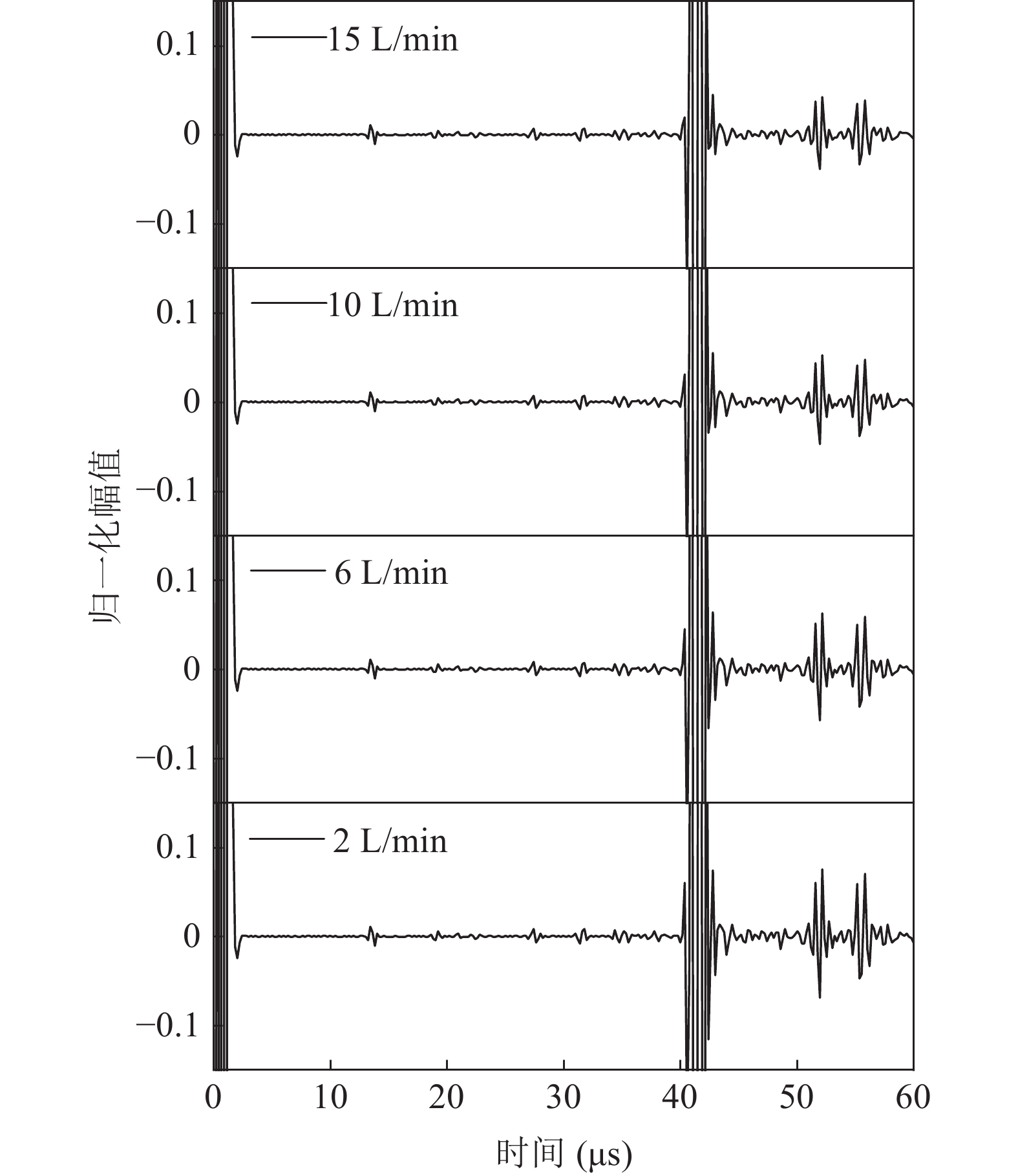
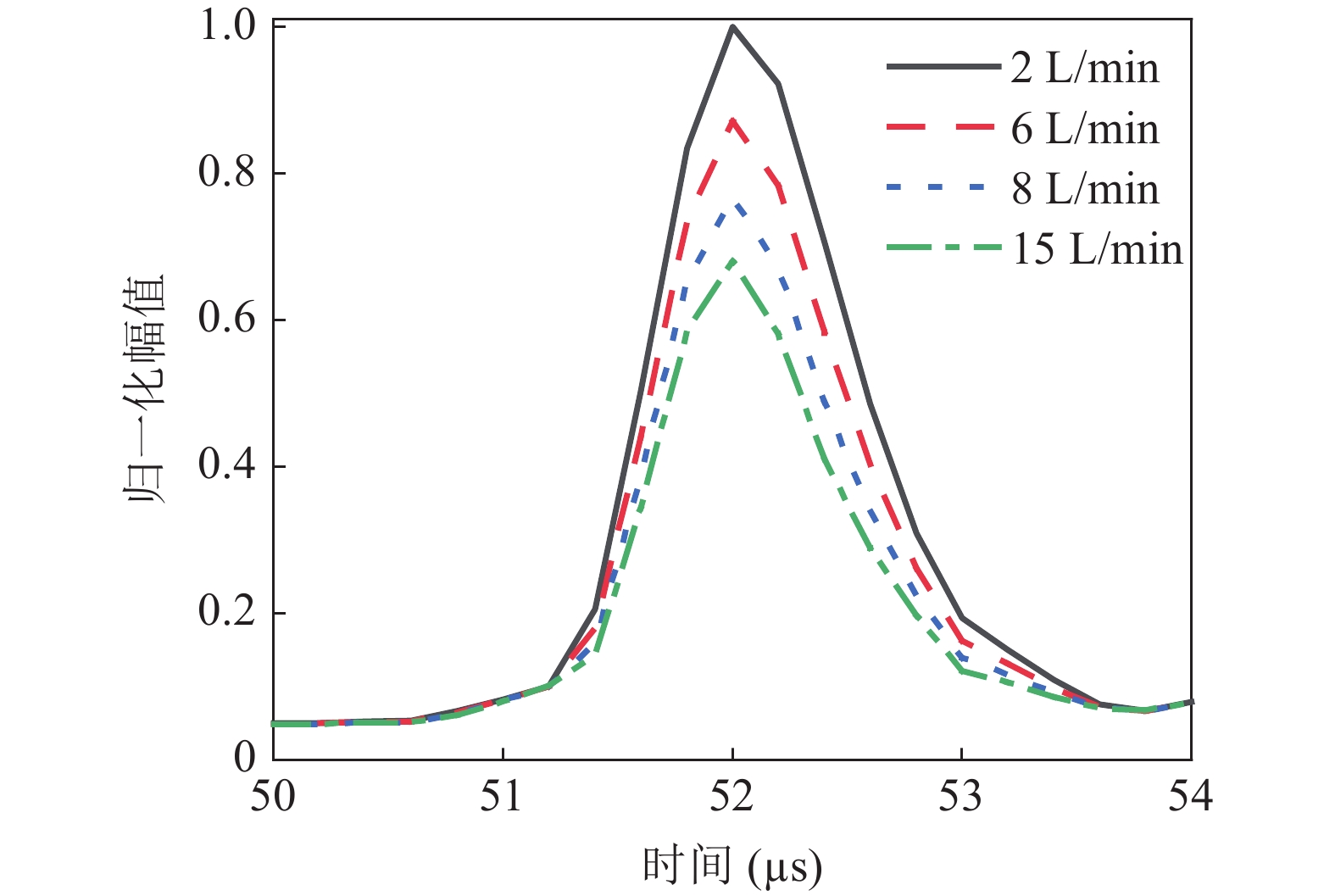
为分析流速对回波幅值的影响规律, 在图9所示模型的工件中添加深度10 mm、直径4 mm的平底孔, 如图13所示。仿真得到四种流速背景下的回波, 如图14所示, 其中50.2 μs处的波包为平底孔回波, 随着流速增大, 底面回波和平底孔回波的幅值都随之减小。为直观表示回波幅值的变化规律, 对平底孔回波进行检波并归一化处理, 结果如图15所示, 平底孔回波的幅值随着流速增大而减小。
-
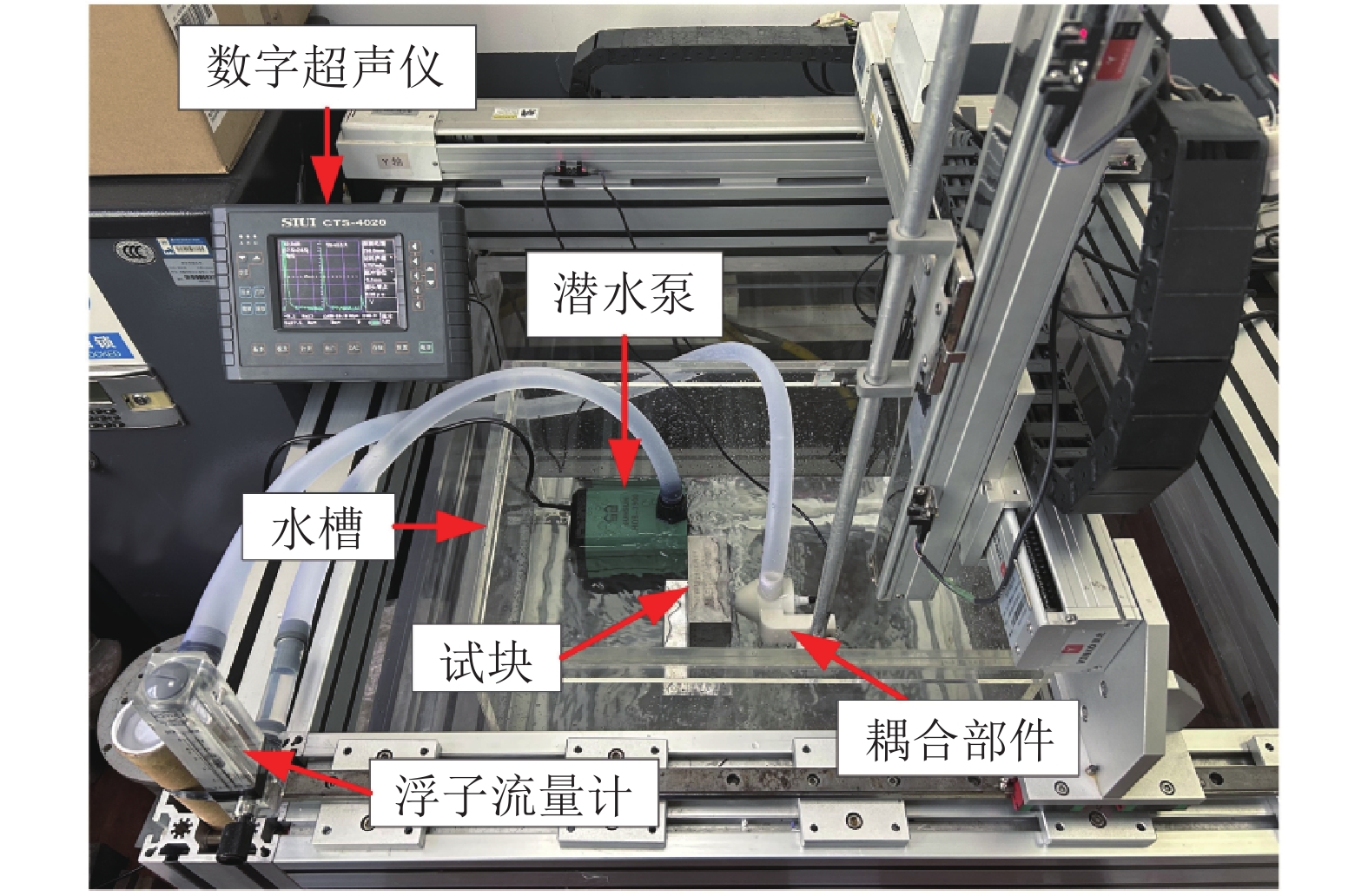
为验证本文建立的喷水式超声检测声−流耦合模型, 搭建了如图16所示的喷水式超声检测系统, 该系统主要由水循环系统、三自由度扫查机构、CTS-4020数字超声探伤仪、喷水探头等组成。水循环系统主要包括水槽、潜水泵、浮子流量计等, 潜水泵扬程3.5 m, 最大流量3500 L/h, 浮子流量计可控制流量为2~18 L/min。喷水探头由水浸探头和喷头组成, 探头中心频率为2.5 MHz, 直径10 mm, 喷头采用3D打印技术加工, 如图17所示。
-
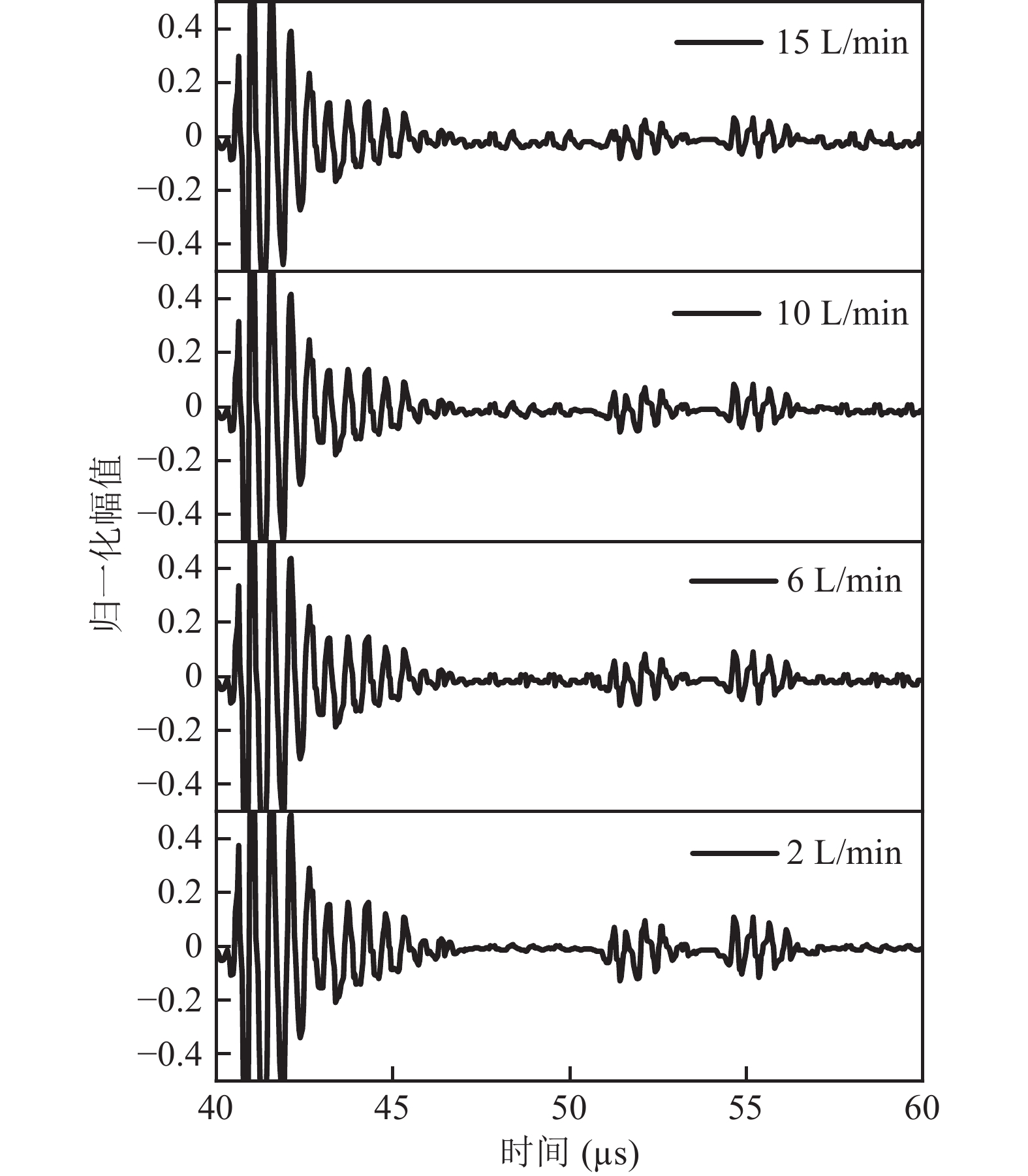
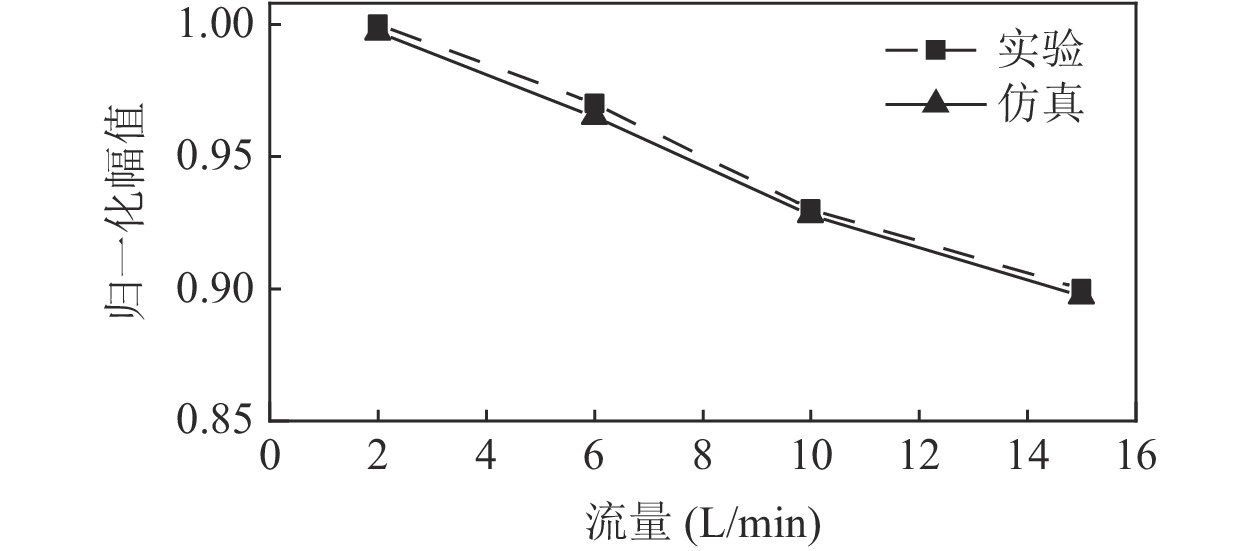
实验采用试块与仿真模型一致, 厚度为40 mm, 材料为普通碳钢, 在底面中心加工直径4 mm、深度10 mm的平底孔, 探头与试块间的射流距离为5 mm, 调节流量计使流速分别为2 L/min, 6 L/min, 10 L/min, 15 L/min进行实验。图18为不同流速下的实验回波, 随着流速的减小, 界面波、缺陷波和底面回波的幅值均呈增大的趋势。为研究回波幅值与射流速度的关系, 对仿真缺陷回波和实验平底孔回波进行检波, 并对幅值进行归一化处理, 结果如图19所示, 数值结果和实验结果相吻合。
-
本文分别建立了喷水超声探头流体域CFD模型与声场模型, 将CFD计算结果通过网格映射转移到声学网格, 用线性纳维−斯托克斯方程求解湍动能、流速等引起的声学变化, 得到了喷水式超声检测的声−流耦合模型。采用维多辛斯基曲线作为喷嘴内部流道型线, 收缩处的水流横向压力梯度和径向分速度逐渐减小, 出水口处能形成稳定的射流。通过仿真和实验分析, 发现进水口流速的变化不会改变工件中声压的分布规律, 但声轴线上声压幅值随着流速的增大而减小, 平底孔回波幅值随着流速的增大而减小。本文研究结果为优化喷水超声检测工艺提供思路, 可提高采用幅值法对缺陷进行定量评价的准确性。
喷水式超声检测的声−流耦合模型
Modeling of acousto-fluid interaction in water-jet ultrasonic testing
-
摘要: 为研究超声波在射流水柱中的传播特性, 提出了喷水式超声检测的声−流耦合建模方法。使用计算流体动力学方法得到喷水探头内部流场的湍动能、速度和压力, 并通过弱形式偏微分方程将其映射到声学网格作为声场分析的边界条件, 用线性纳维−斯托克斯方程求解湍动能、流速等引起的声学变化, 建立了喷水式超声检测的声−流耦合模型。仿真计算了不同流速时工件内部的声压分布, 进水口流速的变化不会改变工件中声压的分布规律, 但空间声压幅值随着流速的增大而减小。仿真计算了不同流速时的平底孔回波, 回波幅值随着流速的增大而减小, 通过与实验结果对比, 验证了本文方法的准确性。
-
关键词:
- 43.35
Abstract: A method for modeling of acousto-fluid interaction in water-jet ultrasonic testing is proposed to study the ultrasonic wave propagation characteristics in the water jet. The flow field of a water-jet probe is numerically calculated using computational fluid dynamics (CFD). The CFD results, including turbulent kinetic energy, flow velocity and pressure, are transferred to acoustic meshes as boundary conditions using weak formulations of the partial differential equations. The linear Navier-Stokes equations are used to solve for the acoustic changes caused by turbulent kinetic energy and flow velocity, thus modeling the acousto-fluid interaction in water-jet ultrasonic testing. Numerical calculations of the sound pressure distribution in the workpiece at different flow velocities are performed using the acousto-fluid interaction model. The results show that the sound field distribution is similar, but as the flow velocity increases, the pressure amplitude decreases. The echoes of the flat bottom hole are obtained using the proposed method and the echo amplitude decreases as the flow velocity increases. The accuracy of the proposed method is validated by comparison with experimental measurement results.-
Key words:
- Water-jet ultrasonic testing .
-

-
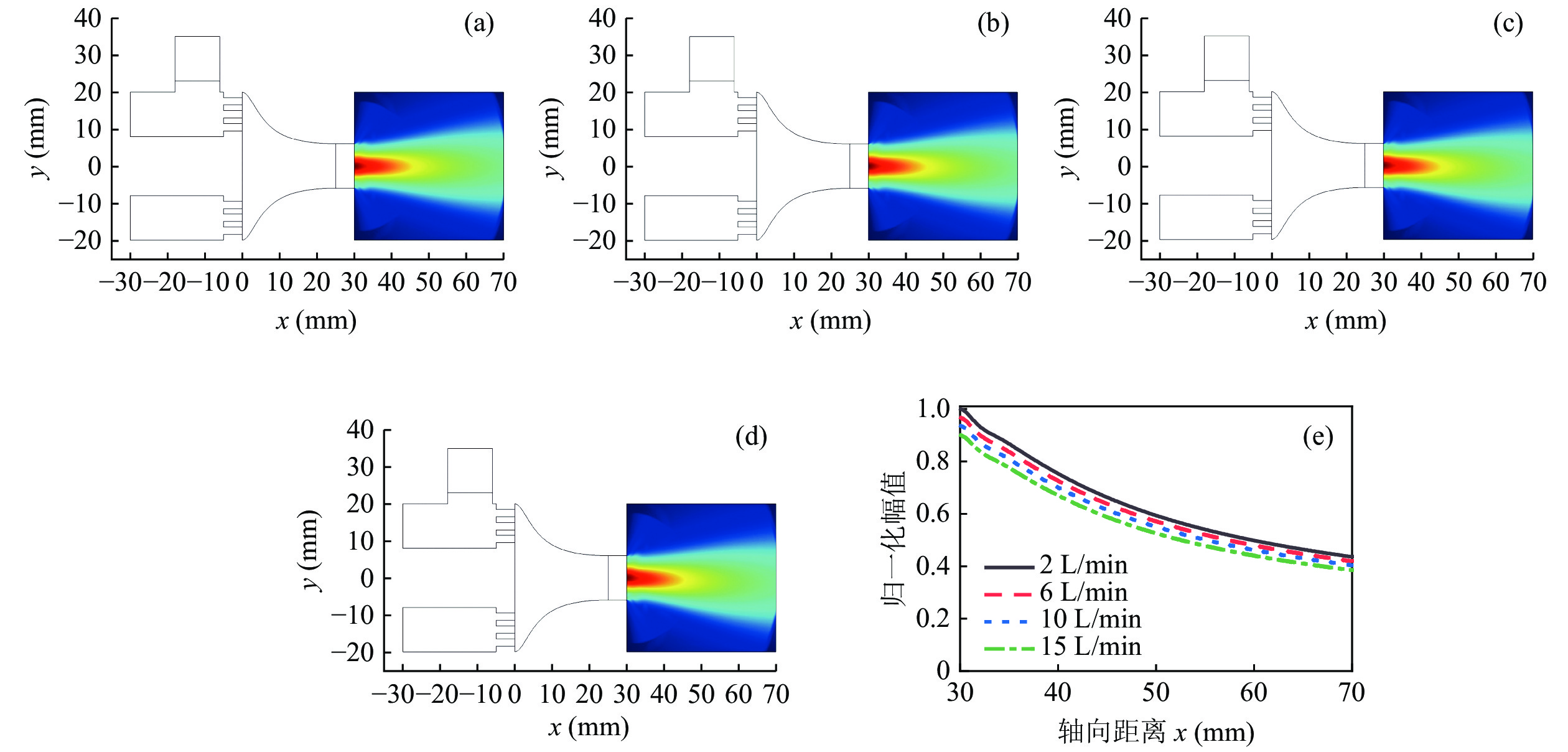
图 12 不同流速时的声场 (a) 流速2 L/min; (b) 流速6 L/min; (c) 流速10 L/min; (d) 流速15 L/min; (e) 声轴线上声压曲线
表 1 材料参数
材料 声速 $ c $ (m/s)

密度 $ \rho $ (kg/m3)

泊松比 杨氏模量(GPa) 水 1500 1000 — — 工件 5900 7850 0.269 210  下载: 导出CSV
下载: 导出CSV
-
[1] 庄泽宇, 廉国选, 王小民. 水浸超声检测的平面波频域快速成像算法. 声学学报, 2021; 46(6): 1153−1163 doi: 10.15949/j.cnki.0371-0025.2021.06.034 [2] Olofsson T. Phase shift migration for imaging layered objects and objects immersed in water. IEEE Trans. Ultrason. Ferroelectr. Freq. Control, 2010; 57(11): 2522−2530 doi: 10.1109/TUFFC.2010.1718 [3] Khaled A, Maréchal P, Lenoir O, et al. Study of the resonances of periodic plane media immersed in water: Theory and experiment. Ultrasonics, 2013; 53(3): 642−647 doi: 10.1016/j.ultras.2012.11.011 [4] Arranz M C, Carlson J E, Rantatalo M, et al. 3D synthetic aperture imaging using a water-jet coupled large aperture single transducer. IEEE International Ultrasonics Symposium, Chicago, IL, USA, 2014: 1372−1375 [5] Lu Z X, Xu C G, Xiao D G, et al. Nondestructive testing method for curved surfaces based on the multi-Gaussian beam model. J. Nondestruct. Eval., 2015; 34: 1−9 doi: 10.1007/s10921-014-0275-3 [6] Petrescu R V, Aversa R, Akash B, et al. Testing by non-destructive control. Am. J. Eng. Appl. Sci, 2017; 10(2): 568−583 doi: 10.3844/ajeassp.2017.568.583 [7] Guo C Z, Xu C G, Xiao D G, et al. Trajectory planning method for improving alignment accuracy of probes for dual-robot air-coupled ultrasonic testing system. Int. J. Adv. Rob. Syst., 2019; 16(2): 1−11 doi: 10.1177/1729881419842713 [8] 杨友胜, 张建平, 聂松林. 水射流喷嘴能量损失研究. 机械工程学报, 2013; 49(2): 139−145 doi: 10.3901/JME.2013.02.139 [9] 周庆祥, 李经明, 李建奎, 等. 超声C扫描用喷水系统设计及其检测稳定性. 应用声学, 2021; 40(4): 579−587 doi: 10.11684/j.issn.1000-310X.2021.04.012 [10] 范伟诚, 沈功田, 王宝轩, 等. 钢板受控射流超声检测用线聚焦探头检测灵敏度的影响因素. 无损检测, 2021; 43(10): 19−24 doi: 10.11973/wsjc202110004 [11] Mohammed M S, Kim K S. Probability of detection simulations to study the influence of surface roughness on the reliability of ultrasonic testing system. Russ. J. Nondestr. Test., 2014; 50: 239−247 doi: 10.1134/S1061830914040056 [12] Yin X T, Morris S A, O'Brien W D, et al. Ultrasonic pulse-echo subwavelength defect detection mechanism: Experiment and simulation. J. Nondestruct. Eval., 2003; 22: 103−115 doi: 10.1023/B:JONE.0000010737.63227.f4 [13] Calmon P, Mahaut S, Chatillon S, et al. CIVA: An expertise platform for simulation and processing NDT data. Ultrasonics, 2006; 44: 975−979 doi: 10.1016/j.ultras.2006.05.218 [14] Belgroune D, Belleval J F, Djelouah H. A theoretical study of ultrasonic wave transmission through a fluid-solid interface. Ultrasonics, 2008; 48(3): 220−230 doi: 10.1016/j.ultras.2008.01.003 [15] Huang R, Schmerr L W, Sedov A. Multi-gaussian beam modeling for multilayered anisotropic media, I: Modeling foundations. Res. Nondestruct. Eval., 2007; 18(4): 193−220 doi: 10.1080/09349840701392532 [16] 贾惠芹, 王成云, 党瑞荣. 流体流速对超声波流量测量精度的影响及校准. 仪器仪表学报, 2020; 41(7): 1−8 doi: 10.19650/j.cnki.cjsi.J2006211 [17] Kierkegaard A, Boij S, Efraimsson G. A frequency domain linearized Navier-Stokes equations approach to acoustic propagation in flow ducts with sharp edges. J. Acoust. Soc. Am., 2010; 127(2): 710−719 doi: 10.1121/1.3273899 [18] Kierkegaard A, Allam S, Efraimsson G, et al. Simulations of whistling and the whistling potentiality of an induct orifice with linear aeroacoustics. J. Sound Vib., 2012; 331(5): 1084−1096 doi: 10.1016/j.jsv.2011.10.028 [19] Williamschen M, Gabard G. Interface source terms for high-order aeroacoustics. AIAA J., 2020; 58(3): 1079−1092 doi: 10.2514/1.J058317 [20] Sun Y, Zhang T, Zheng D. New analysis scheme of flow-acoustic coupling for gas ultrasonic flowmeter with vortex near the transducer. Sensors, 2018; 18(4): 1151 doi: 10.3390/s18041151 [21] 郭立新, 范威. 基于计算流体力学计算结果的穿孔管消声器声学性能研究. 机械工程学报, 2017; 53(1): 79−85 doi: 10.3901/JME.2017.01.079 [22] Baasch T, Doinikov A A, Dual J. Acoustic streaming outside and inside a fluid particle undergoing monopole and dipole oscillations. Phys. Rev. E, 2020; 101(1): 1−16 doi: 10.1103/PhysRevE.101.013108 [23] Baglietto E, Ninokata H. A turbulence model study for simulating flow inside tight lattice rod bundles. Nucl. Eng. Des., 2005; 235(7): 773−784 doi: 10.1016/j.nucengdes.2004.10.007 [24] Clair V, Gabard G. Spectral broadening of acoustic waves by convected vortices. J. Fluid Mech., 2018; 841: 50−80 doi: 10.1017/jfm.2018.94 [25] 荆晨轩, 时胜国, 杨德森, 等. 水下低频振荡涡流场声散射调制机理与特性研究. 物理学报, 2023; 72(1): 221−235 doi: 10.7498/aps.72.20221748 [26] 卢华兵, 王正祥, 刘威, 等. 燃气轮机1.5级轴流压气机气动噪声预测. 哈尔滨工程大学学报, 2023; 44(3): 379−385 doi: 10.11990/jheu.202206047 [27] 施智晓, 许聪, 赖焕新. 多孔空腔结构对亚音速喷流噪声影响的研究. 工程热物理学报, 2019; 40(3): 559−564 -
图( 19) 表( 1)
计量
- 文章访问数: 1027
- HTML全文浏览数: 1027
- PDF下载数: 8
- 施引文献: 0