
 首页
首页 登录
登录 注册
注册



 下载:
下载:
-
干式螺杆真空泵具有无油污染、摩擦小、结构紧凑、抽速范围宽等优点,广泛应用于半导体、微电子、制药等领域[1-2]。常见的螺杆真空泵的转子是单头型线,其形心会偏离旋转轴,在高转速工作中,将造成较大的惯性力和惯性力矩,使得螺杆真空泵的轴承、传动齿轮等运动副中有动压力的产生,加剧了零件的磨损,严重影响了泵的寿命和性能。目前,许多设计人员都是基于三维设计软件,采用“试凑法”去重或配重来设计动平衡的螺杆转子[3],过程繁琐且设计质量较差。Zhang等[4]研究了单头等螺距螺杆真空泵转子的动平衡问题,提出了两个端面预制相同的空腔的去重方法来实现转子动平衡。刘明昆等[5]通过数学计算将单头型线转换成平衡性较好的双头对称型线。Pouriayevali[6]设计了一种平衡性能良好的变螺距螺杆转子,自身能够达到85%以上的平衡。Becher[7]提出了平衡变螺距螺杆转子截面型线质心偏心的技术方案。巫修海等[8]借助Hermite插值理论优化设计了一种自平衡的螺杆转子。王永庆等[9]基于MATLAB/GUI对等螺距螺杆转子进行动平衡分析计算,并采用了配重块的动平衡方式,但仅适用于径向截面不变的螺杆转子。
为延长泵的使用寿命、提升工作性能,在研发过程中,针对螺杆转子的动平衡的合理设计将极其重要。本文采用VB.NET语言对SolidWorks展开二次开发,设计了简洁直观、使用便捷的人机交互界面,实现在SolidWorks中精确计算任意结构的螺杆转子的不平衡量和不平衡相角,为其动平衡设计过程的自动化提供指导。即获得不平衡量和相角结果后,设计人员在选定的两个平行平面上的不平衡相角位置,配上或去除相应质量,从而消除该面上的不平衡量,当不平衡量为零时,则转子达到了动平衡。若经过一次双面平衡,不平衡量仍较大,则需要再次选定两个新的平面进行计算和去、配重,最终实现螺杆转子的整体动平衡。这与常规的“试凑法”动平衡处理相比较,减少了繁琐工作并提高了动平衡精度和动平衡的设计质量。该界面也可用于其他类型回转件的动平衡计算,普适性高。
-
螺杆真空泵的核心部件是一对相互啮合等速旋转的左、右旋螺杆转子,因其工作转速远低于其一阶弯曲临界转速、结构刚性好变形小,故可视为刚性转子[10]。
对于轴向长度很小的刚性转子(转子长度和宽度之比b/d≤0.2的转子),如砂轮、飞轮等,可以忽略轴向长度的影响,其质量的分布可以视作在同一回转平面内。当此类转子旋转时,这些质量产生惯性力表现为离心力,构成同一回转平面内的汇交力系[11]。对于此类转子的不平衡量的计算:
式中m和e为回转件的总质量和总质心的矢径;mi、ri为原有各质量和其质心的矢径。
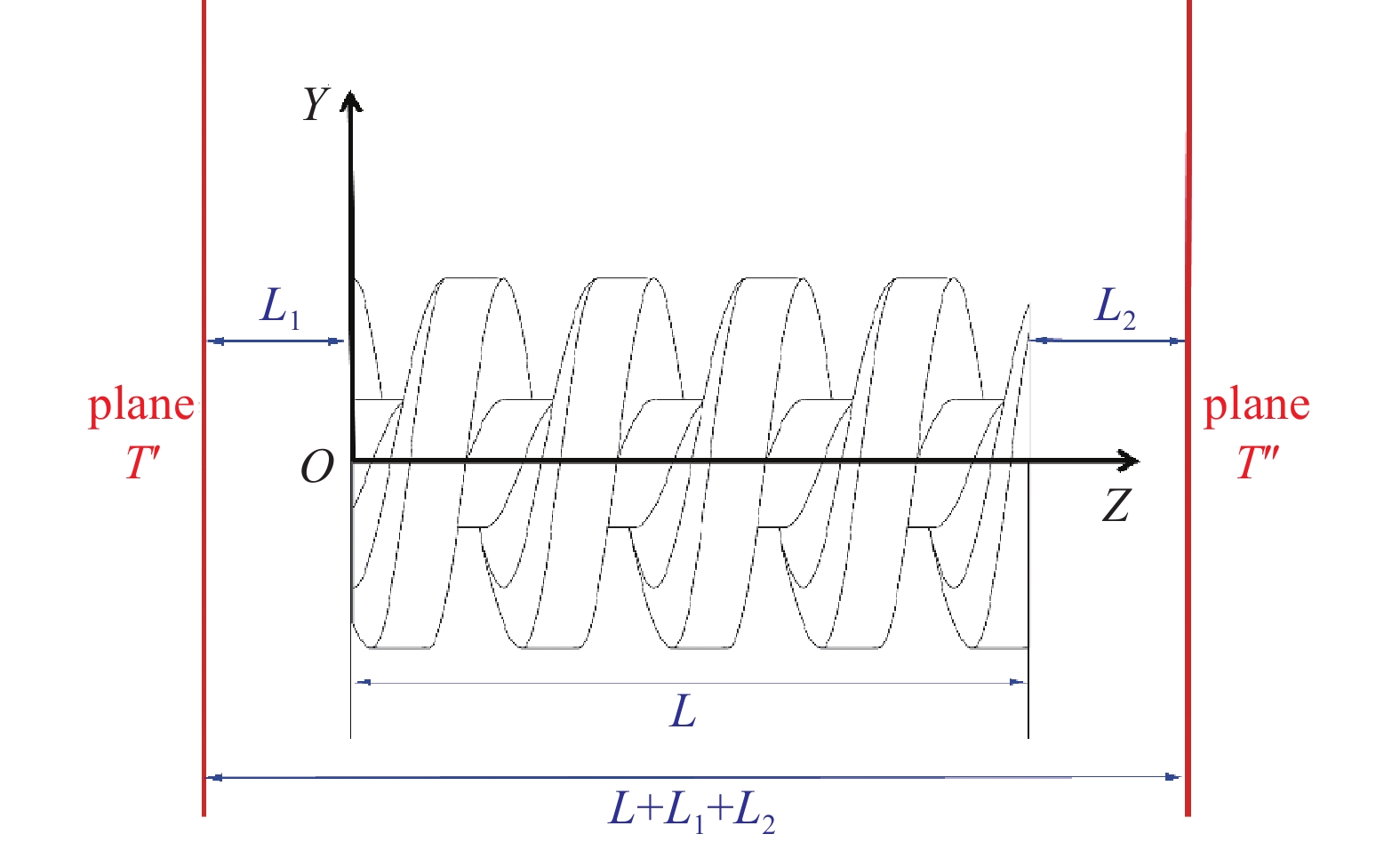
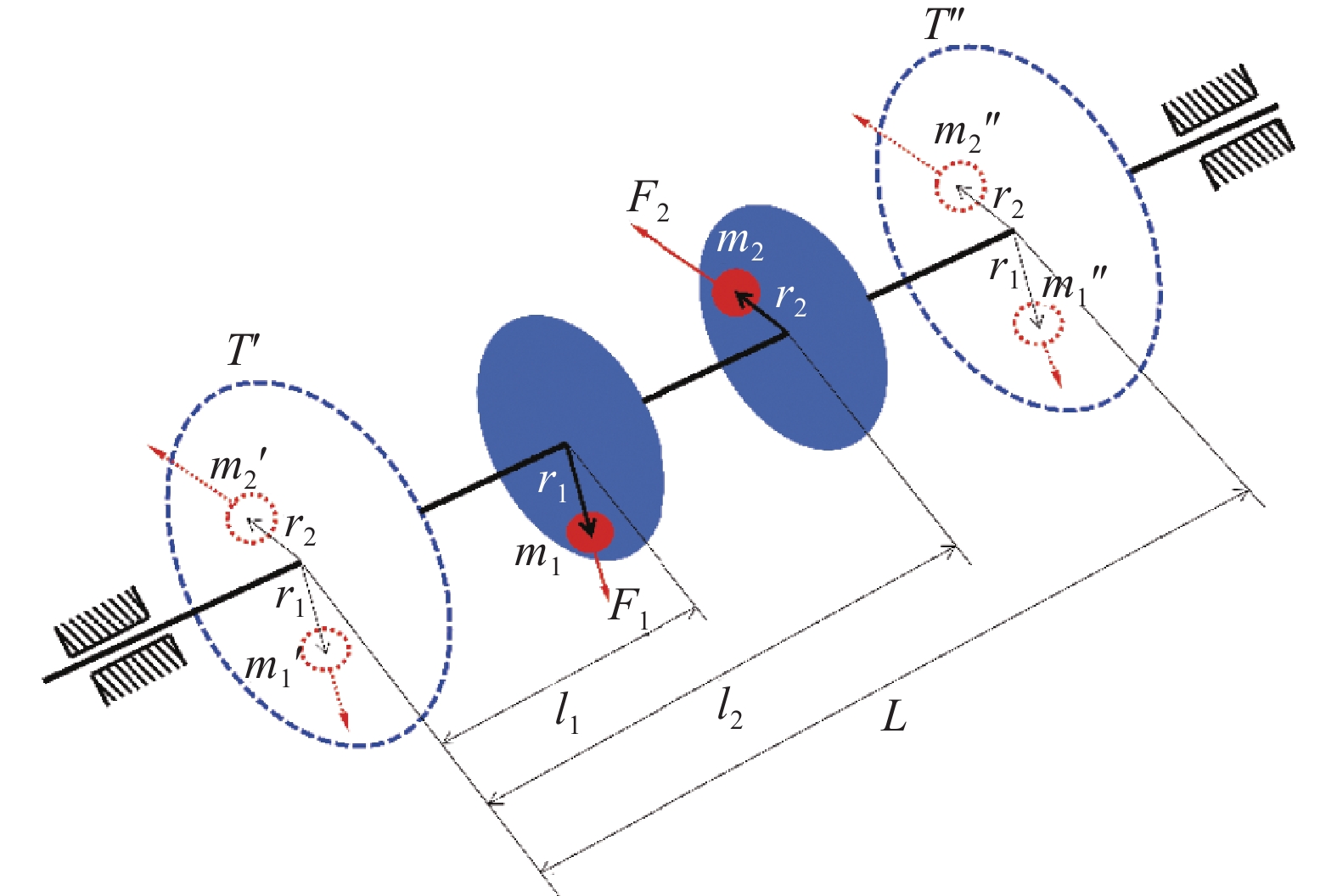
对于轴向长度较大的刚性转子(b/d≥0.2),长度的影响不能忽略,其质量的分布并不能视作位于同一平面内,这些质量产生的离心力形成空间力系。如图1所示,这类转子各个平面内的不平衡质量可以被集中在T′和T″两个回转平面(平衡基面)内的等效不平衡质量所代替,它们导致的不平衡是相同的[12-14]。对于T′,T″面的不平衡量分别为:
-
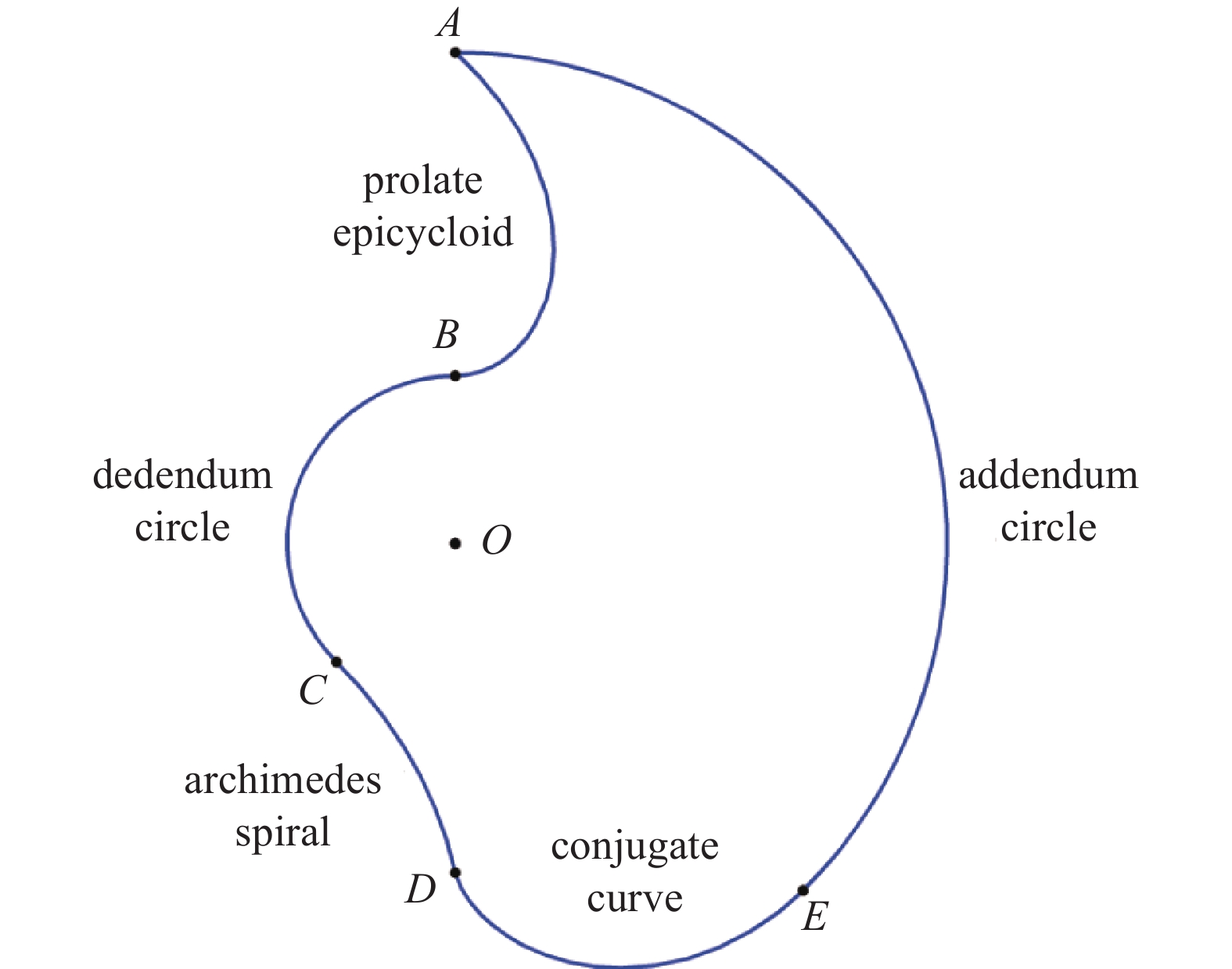
螺杆转子是由其端面型线沿着特定的螺旋线路径扫描而生成三维模型。本文选用的螺杆转子的端面型线如图2所示,该型线是由摆线AB、齿根圆弧BC、阿基米德线CD、阿基米德线的共轭曲线DE、齿顶圆弧EA依次连接组成[14]。
以齿顶圆弧EA的圆心O为原点,构建如图3所示的空间直角坐标系,X轴垂直纸面向里。T′面和T″面到转子两端面的距离分别记为L1、L2,T′面若在Z=0端面左侧记L1为正、若在右侧L1则记为负,T″面在Z=L端面右侧记L2为正、若在左侧则L2为负,转子长度为L。
由于螺杆转子结构的特殊性,它的不平衡质径积也可以通过积分进行准确计算[9],但这种积分计算仅仅适用于径向截面不变的螺杆转子。对于去重后的螺杆转子、锥形螺杆转子等,此类转子的径向截面会发生改变,积分法计算不再适用,则可以使用等效替代的近似计算方法。将转子沿轴向等分为N份,计算每份质量块的等效质径积:xi、yi、zi为每一块质量块的质心坐标,分别求出所有质量块等效分解到T′面、T″面上X方向质径积M′x、M″x与Y方向质径积M′y、M″y。即可得到等效在T′、T″面上的不平衡量M′、M″和不平衡相角θ′、θ″:
式中,
${\theta }_{i}={\rm{arctan}}\left(\left|\dfrac{{y}_{i}}{{x}_{i}}\right|\right)$ 。特别地,由于近似法的原理不涉及螺杆转子端面型线和结构,所以基于此原理开发的界面可用于任何类型螺杆转子和其他回转件的动平衡计算。 -
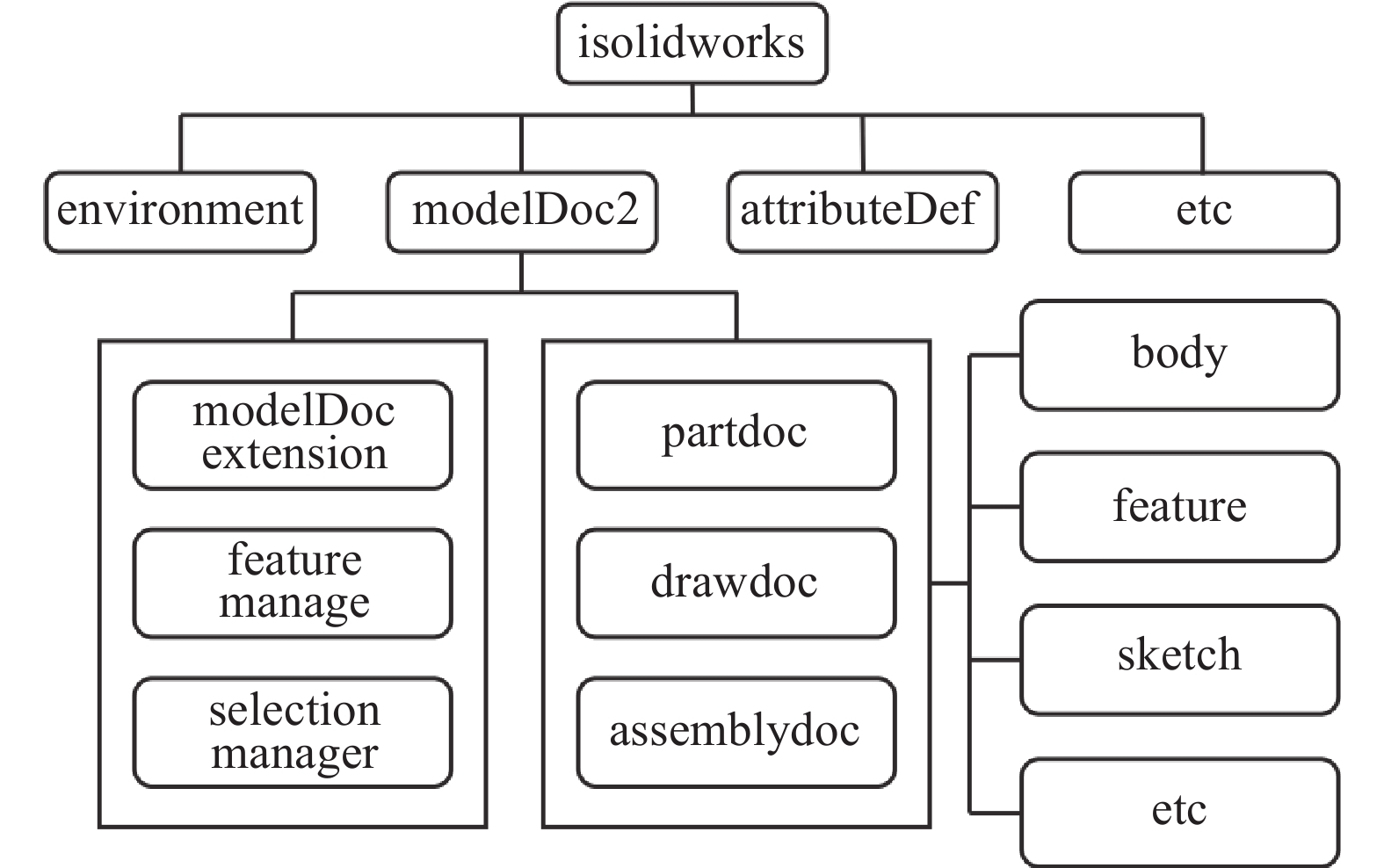
为了满足用户对特定功能的需求,SolidWorks集成了众多的Application Programming Interface(API)函数,它们是SolidWorks的Object Linding and Embedding(OLE)和Component Object Model(COM)接口。通过链接OLE和COM接口,开发人员可借助VB.NET、VC++等对SolidWorks展开二次开发[15]。如图4所示,SolidWorks二次开发中常用的API对象。其中,最常用的是ModelDoc2(文件类型)对象,它包含了三个扩展对象和三个子对象PartDoc、DrawingDoc、AssemblyDoc。通过使用子对象,可以实现相应文件类型的二次开发,建立具体的功能模块[16]。
为便于用户使用和程序稳定运行,本文依据OLE技术进行二次开发。OLE作为一种对象链接与嵌入技术,在多个应用程序之间搭建了数据共享桥梁,是对COM技术的继承和发展。用户可使用SolidWorks活动文档和其他支持OLE对象的应用程序进行相互链接或嵌入。利用OLE技术的开发可以生成独立启动而不与SolidWorks相关联的Windows exe应用程序,但使用Windows exe应用程序功能则需要和SolidWorks进行交互[17]。
-
VB.NET是一种面向对象、高效简单、功能广泛的编程语言。借助VB.NET语言对SolidWorks展开二次开发,首先需要搭建VB.NET和SolidWorks之间的链接,其具体过程如下:
(1)在Vistual Studio中创建一个窗体程序,并添加按钮控件(Button)、文本框控件(TextBox)等。
(2)在VB.NET中导入SolidWorks API接口和枚举常量,然后利用GetObject方法创建Sldworks对象以及调用当前ModelDoc2对象,主要程序如下:
Dim swApp As SldWorks.SldWorks
Dim swModel As SldWorks.ModelDoc2
swApp = GetObject(,"SldWorks.Application")
swModel = swApp.ActiveDoc
-
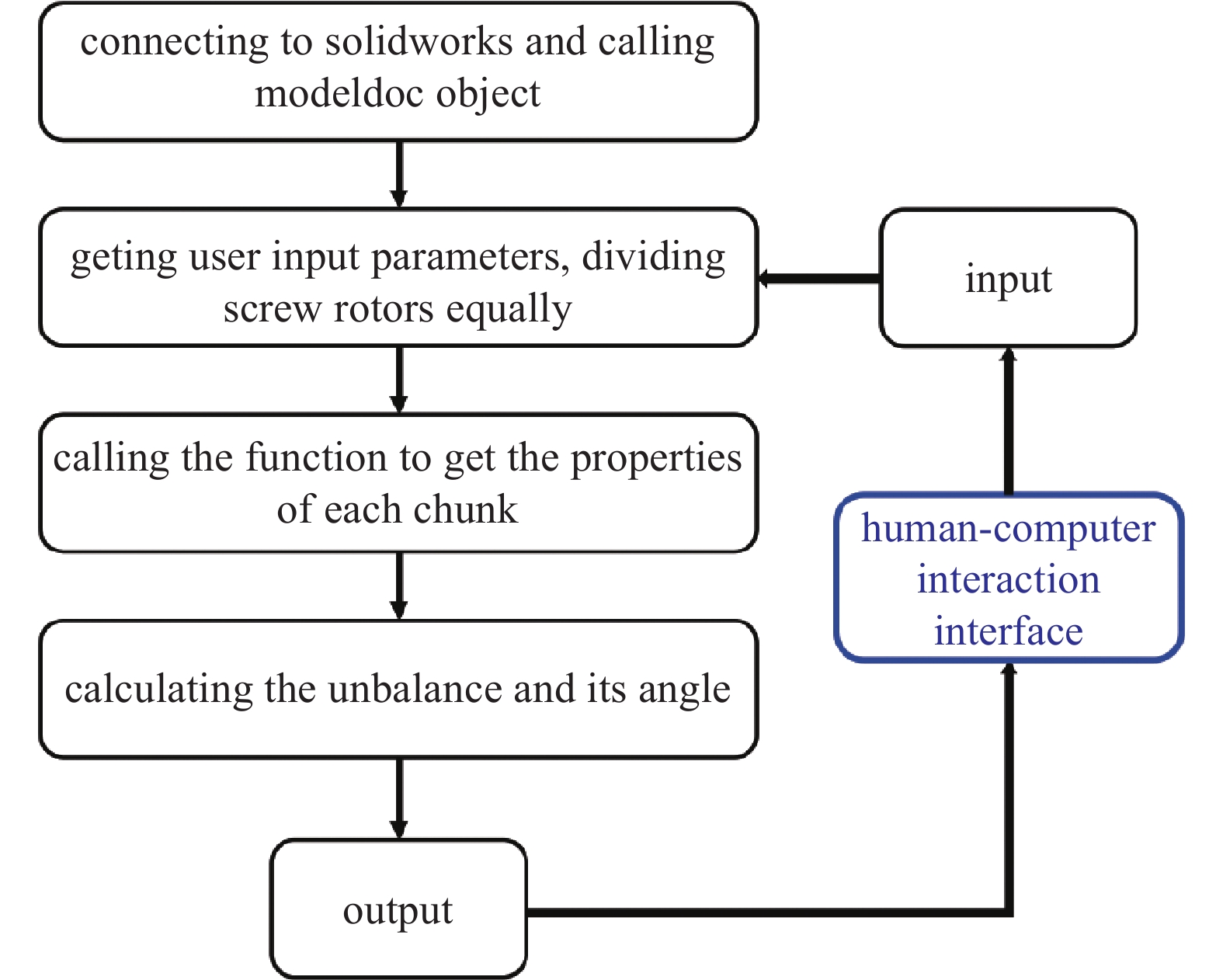
根据近似法计算不平衡量原理,基于SolidWorks二次开发对螺杆转子的动平衡分析的流程图如图5所示。
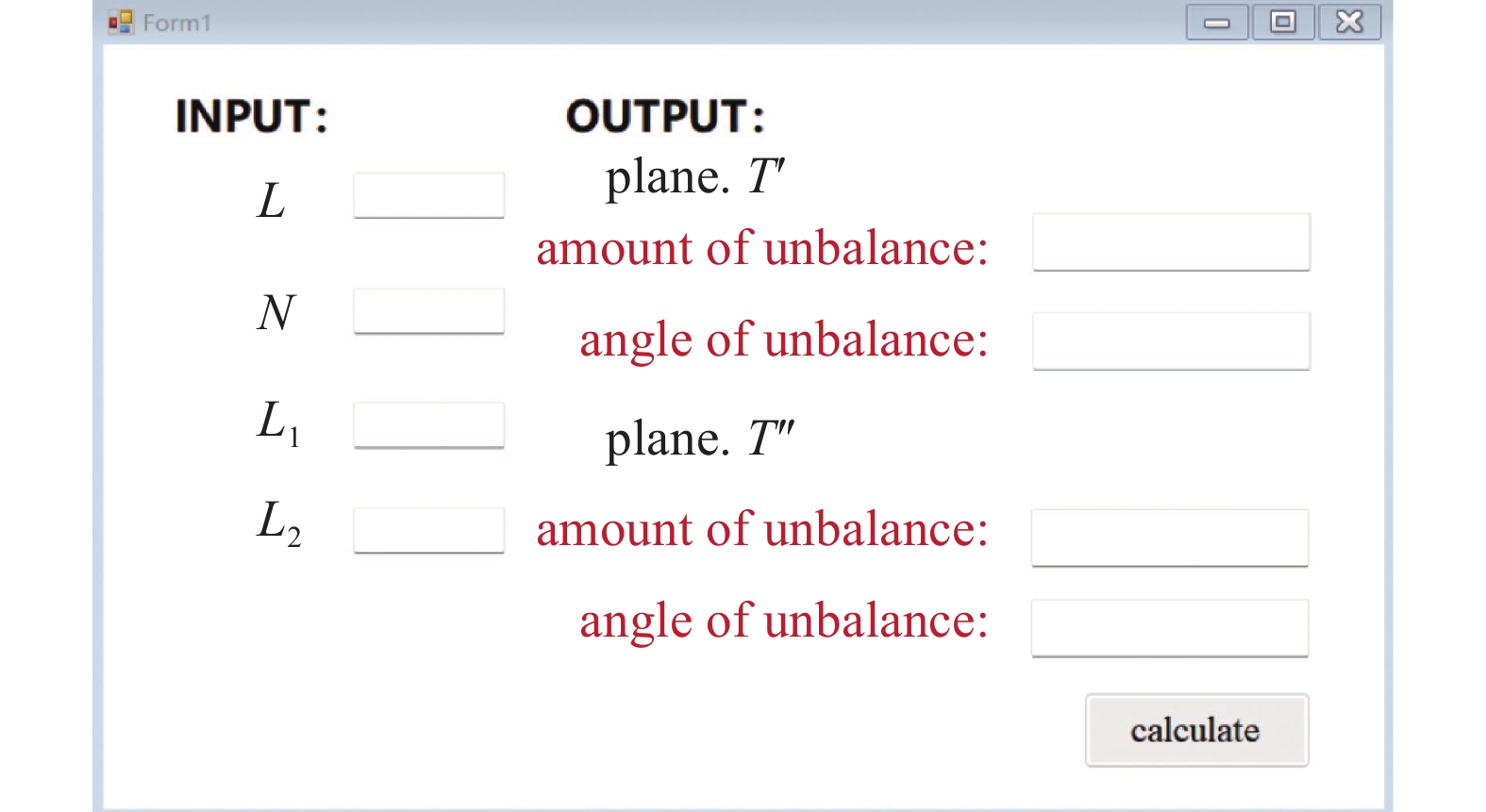
按照流程图,编写程序代码,建立人机交互界面。用户界面的设计要遵循界面友好的原则,建立的用户界面窗口如图6所示。在该界面中,“INPUT”区域输入转子长度L,轴向等距分段数N,T′面至转子左侧端面的距离L1和T″面至转子右侧端面的距离L2。点击按钮“calculate”后即可在“OUTPUT”区域输出不平衡量和不平衡相角。操作简单,使用方便。
界面开发过程中主要难点和核心内容是对螺杆转子的等距划分并获取每一份质量块的质量属性。本文采用在转子两端面分别对其相向拉伸切除的方法,利用循环语句循环N次,将转子依次沿轴向等距划分,并同时获取从第1份质量块到第N份质量块的质量属性,再将质量属性代入程序语言表达的式(4)~(11)的动平衡计算中,即可获得T′面和T′面不平衡量和不平衡相角。相对于其他方案,该方案计算时间快、准确度高、适应性好、在运行过程中不会崩溃。以下是VB.NET二次开发SolidWorks,计算转子不平衡量和不平衡相角的部分核心源程序代码:
Do Until i > N
swModel.Extension.SelectByID2("T1", "SKETCH", 0, 0, 0, False, 0, Nothing, 0)
Featmgr.FeatureCut3……
swModel.Extension.SelectByID2("T2", "SKETCH", 0, 0, 0, False, 0, Nothing, 0)
Featmgr.FeatureCut3……
‘螺杆转子沿轴向等距分段,共N份质量块
swModelExt = swModel.Extension
vMassProp=swModelExt.GetMassProperties2……
‘获取每一份质量块的质心和质量等属性
……‘计算每一份质量块等效在平衡基面上不平衡质径积,即用程序语言表达(4)-(7)式
Loop
-
螺杆转子可视为N个极薄圆柱体连续拼接而成,整个转子的不平衡是由每一个极薄圆柱体相对旋转轴线存在一定的偏心所致[18-21]。轴向等距分段数N越多,则动平衡的计算结果就越趋进于转子的实际情况。
采用图2所示端面型线,左旋转子齿顶圆直径D为164 mm,齿根圆直径d为56 mm,转子螺距P为66 mm,导程数为4.3,长度L为283.8 mm,转子密度ρ为7000 kg/m3。如图7所示,探究了不同分段数下,近似法计算与积分法精确计算[9]不平衡量及其相角的结果的比较。可以发现当N大于25时,二者结果较为接近。综合考虑计算时间和动平衡计算精度,N取25-40。
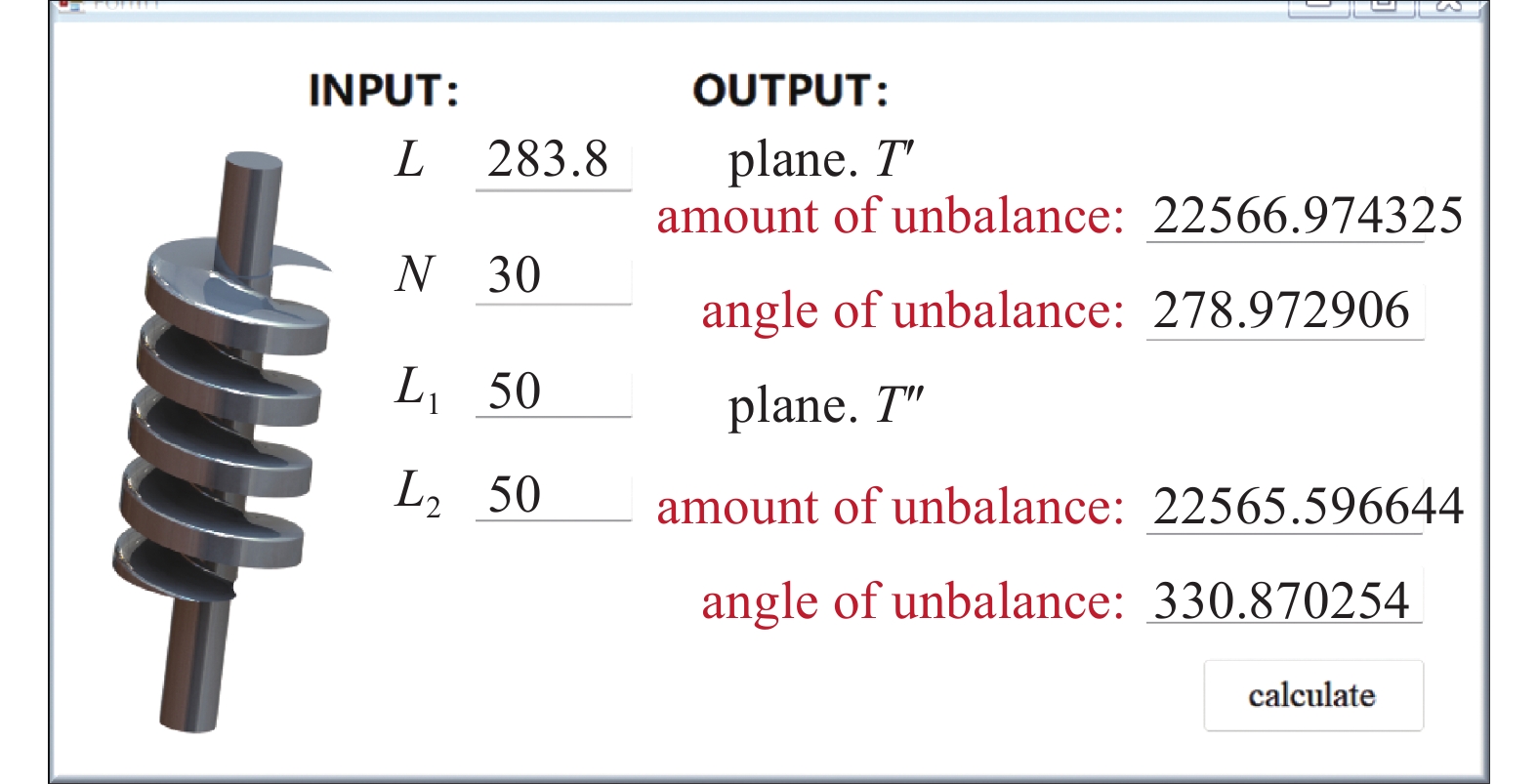
在人机交互界面窗口中,输入转子长度L=283.8、分段数N=30、平衡基面T′和T″的位置一般依据实际情况需要选定,这里选取L1=50 mm,L2=50 mm。点击按钮“calculate”。计算结果如图8所示,转子在T′面上不平衡量为22566.97 g·mm,不平衡相角为278.97°;在T″面上不平衡量为22565.60 g·mm,不平衡相角为330.87°;不平衡量较大,转子处于动不平衡。
-
螺杆转子由于其特殊的螺旋式结构,导致设计人员通过“试凑法”动平衡处理时重复工作多、设计周期长且设计质量差。通过上述人机交互界面计算位于T′和T″平衡基面内的不平衡量和不平衡相角后,设计人员则可分别在这两个平衡基面上的不平衡相角位置,配上或去除一定的质量块以消除两面上的不平衡量,质量块的质量为不平衡量除以质量块的矢径,当不平衡量为零时,则转子达到了动平衡。若经过一次双面平衡,不平衡量仍较大,则需要再次选定两个新的平衡基面计算和去、配重,即多次双面平衡操作,最终实现螺杆转子的整体动平衡。一般对于螺杆转子的配重只需要一次双面平衡,齿顶“打孔”去重则需要多次双面平衡。这与常规的“试凑法”动平衡处理相比较,操作简单,大大减少了动平衡设计的工作量,提高了动平衡的设计质量。
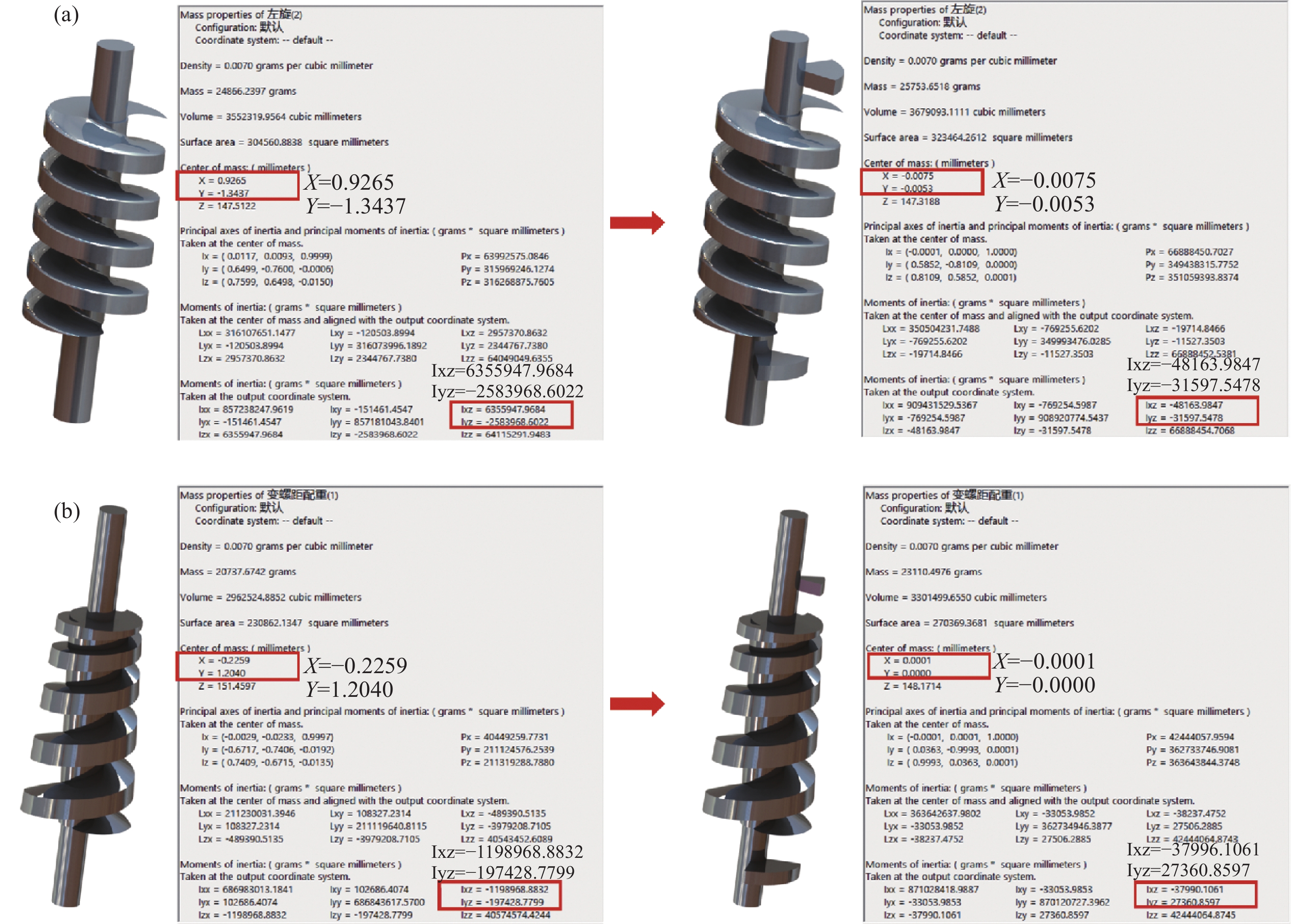
为避免破坏转子结构、降低转子强度,故采用配重的方式解决螺杆转子动平衡问题。对于任意形状的配重块,只要输入其截面的矢径和面积,即可“凸台拉伸”生成相应质量的配重块,同样基于SolidWorks进行了二次开发。例如,对图8中所示转子进行动平衡处理,采用扇形配重块,在两个平衡基面上的对应不平衡相角位置进行配重。配重后的转子在T′面上不平衡量仅为16.98 g·mm,在T″面上不平衡量为21.54 g·mm。配重前后的螺杆转子的质量属性如图9(a)所示。
由于该界面的设计原理不依赖于螺杆转子型线和结构,所以适用于任何螺杆转子和其他类型回转件的动平衡计算。目前锥形螺杆转子由于抽气高效且具备较好的内压缩比和齿槽几何结构正逐渐成为螺杆泵的首选,其动平衡处理也是一项重要的技术。以变螺距锥形螺杆转子作为补充案例,同样采取扇形配重块的方式,输入相关参数,配重处理前后的锥形螺杆转子质量属性如图9(b)所示。
从图9中质量属性可知,螺杆转子绕Z轴旋转,在动平衡前的质心坐标分别为:(X, Y)=(0.9265 mm, −1.3437 mm),(X, Y)=(−0.2259 mm, 1.2040 mm);惯性张量分别为:(Ixz, Iyz)=(6355947.9684 g·mm2, −2583968.6022 g·mm2),(Ixz, Iyz)=(−1198968.8832 g·mm2, −197428.7799 g·mm2),惯性张量比较大,不平衡质量大。配重法处理后的不平衡性明显降低,转子质心坐标基本处于转子转轴上,且惯性张量也明显下降,数值降低至几万;惯性主轴为(0,0,1),与转轴方向一致,充分说明了动平衡效果较好。
-
基于SolidWorks软件平台,以Vistual Studio 2019为开发工具,利用VB.NET语言对转子动平衡的近似法计算过程进行表达,搭建了人机交互界面窗口,可在SolidWorks中对任意类型的螺杆转子的不平衡量和不平衡相角进行计算,也可用于其他不规则零件的动平衡计算。该应用程序界面简洁、使用简单、计算时间快、运行稳定,实现了螺杆转子去重、配重过程的自动化,从而减少了动平衡设计的工作量,提高了动平衡的设计质量和精度。
基于SolidWorks二次开发的螺杆转子动平衡自动计算设计
Automatic Calculation for Dynamic Balance of Screw Rotor Based on SolidWorks Secondary Development
-
摘要: 动平衡是螺杆真空泵设计制造过程中必须解决的重要问题。一般方法是将螺杆转子不平衡质量等效分解到选定的两个平行平面,采用等效替代的近似法进行动平衡分析计算。本文采用SolidWorks二次开发技术,用VB.NET语言对动平衡分析过程进行整合,设计了简单直观的人机交互界面,可对任意类型的螺杆转子不平衡量及其相角进行自动精确计算。在选定的两个平行平衡基面的不平衡相角位置,配上或去除相应质量以消除各面上的不平衡量,当不平衡量为零时,则转子达到了动平衡。若经过一次双面平衡,不平衡量仍较大,则需要再次选定两个新的平衡基面计算和去、配重,即多次双面平衡操作。这大大减少了动平衡设计的工作量并提高了动平衡的设计质量和精度。该界面设计原理与转子型线和结构无关,因此可用于任何类型的螺杆转子和其他不规则零件的动平衡计算。
-
关键词:
- 螺杆真空泵 /
- 螺杆转子 /
- 动平衡 /
- SolidWorks二次开发
Abstract: The general method of dynamic equilibrium analysis is to decompose the unbalance mass into two selected parallel planes. Based on SolidWorks secondary development, this paper designs a human-computer interaction interface, which can calculate the dynamic balance of any screw rotor. Dynamic balance can be achieved by adding or removing the corresponding mass at the unbalance phase Angle position of the selected two planes to eliminate the unbalance on each surface. This reduces effort and improves design quality. The interface can be used to calculate the dynamic balance of any part.-
Key words:
- Screw vacuum pump /
- Rotor /
- Dynamic balance /
- Secondary development of SolidWorks .
-

-
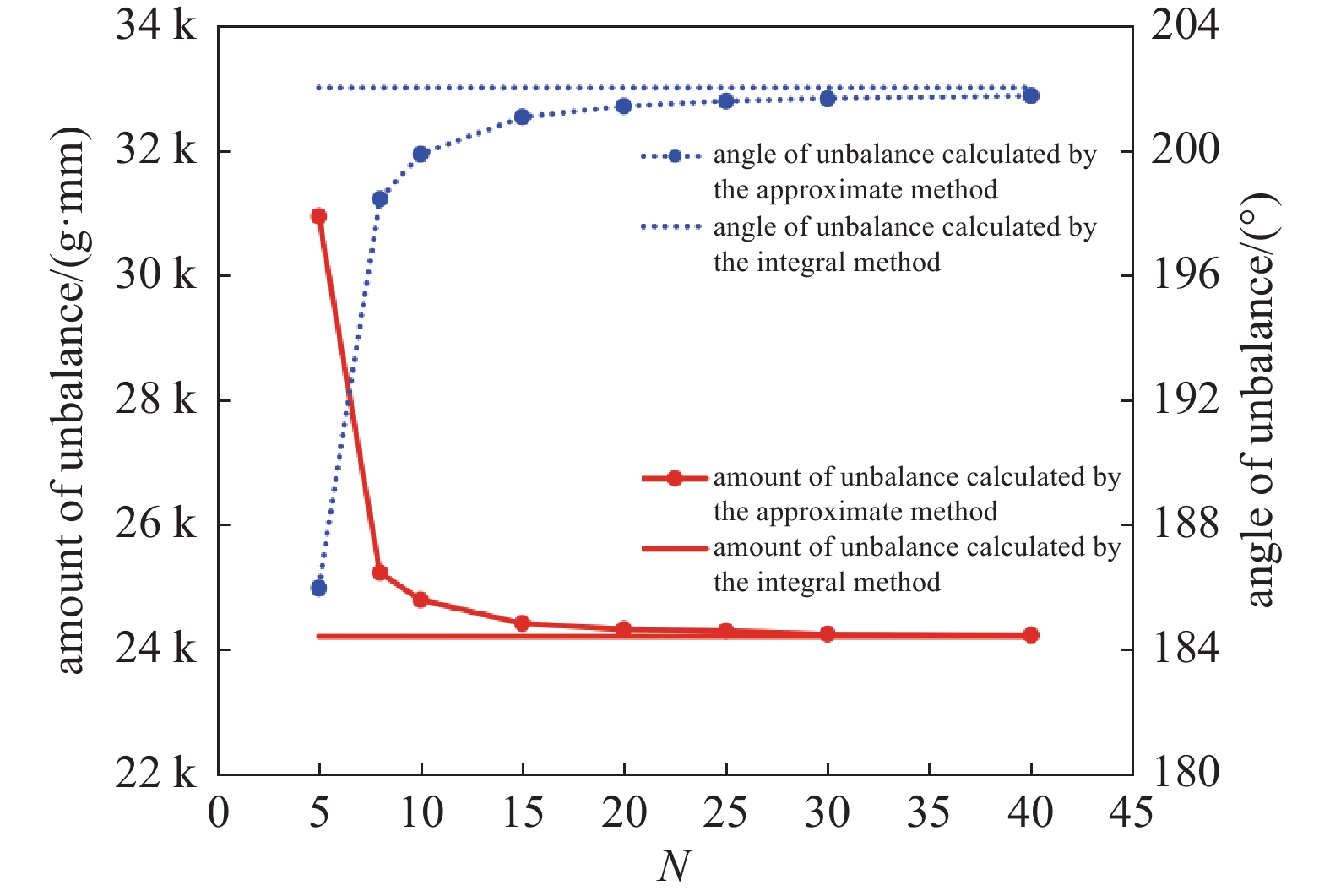
图 7 不同分段数计算的不平衡量及其相角
Figure 7. Amount of unbalance with different segments to calculate
-
[1] Guo P,Xue J G,Niu R,et al. Current situation and outlook for R&D of dry screw vacuum pumps[J]. Vaccum,2009,46(5):37−40 (郭蓓,薛建国,牛瑞,等. 干式螺杆真空泵研究现状与展望[J]. 真空,2009,46(5):37−40(in chinese) doi: 10.13385/j.cnki.vacuum.2009.05.014 Guo P, Xue J G, Niu R, et al. Current situation and outlook for R&D of dry screw vacuum pumps[J]. VACCUM, 2009, 46(5): 37-40 (in chinese) doi: 10.13385/j.cnki.vacuum.2009.05.014 [2] Jiang X C. Characteristics and applications of screw vacuum pump[J]. Vaccum,2013,50(2):1−7 (姜燮昌. 螺杆真空泵的特点与应用[J]. 真空,2013,50(2):1−7(in chinese) doi: 10.3969/j.issn.1002-0322.2013.02.001 Jiang X C. Characteristics and applications of screw vacuum pump[J]. VACCUM, 2013, 50(2): 1-7 (in chinese) doi: 10.3969/j.issn.1002-0322.2013.02.001 [3] Zhang S W,Zhang X T,Zhang J,et al. A simple dynamic balance calculation of the single-threaded and fixed pitch rotor[J]. Vaccum,2015,52(2):1−6 (张世伟,张秀廷,张杰,等. 螺杆真空泵单头等螺距螺杆转子的一种动平衡简便算法[J]. 真空,2015,52(2):1−6(in chinese) doi: 10.13385/j.cnki.vacuum.2015.02.01 Zhang S W, Zhang X T, Zhang J, et al. A simple dynamic balance calculation of the single-threaded and fixed pitch rotor[J]. VACCUM, 2015, 52(2): 1-6 (in chinese) doi: 10.13385/j.cnki.vacuum.2015.02.01 [4] Zhang S,Gu Z,Zhang Z. Dynamic balancing method for the single-threaded, fixed-pitch screw rotor[J]. Vacuum,2013,90(Complete):44−49 [5] Liu M K,Liu X Z,Wang L,et al. Transformation of single-thread profile into twin-thread profile of screw vacuum pump: a simulation and analytical study[J]. Chinese Journal of Vacuum Science and Technology,2019,39(12):1061−1066 (刘明昆,刘星洲,汪亮,等. 螺杆真空泵单头型线变双头方法研究[J]. 真空科学与技术学报,2019,39(12):1061−1066(in chinese) doi: 10.13922/j.cnki.cjovst.2019.12.03 Liu M K, Liu X Z, Wang L, et al. Transformation of single-thread profile into twin-thread profile of screw vacuum pump: a simulation and analytical study[J]. Chinese Journal of Vacuum Science and Technology, 2019, 39(12): 1061-1066 (in chinese) doi: 10.13922/j.cnki.cjovst.2019.12.03 [6] Pouriayevali H,Guo Y B,Shim V. A visco-hyperelastic constitutive description of elastomer behaviour at high strain rates[J]. Procedia Engineering,2011,10(7):2274−2279 [7] Becher U F. Twin screw rotors and displacement machines containing the same[P]. US: US6702558 B2 [8] Wu X H,Chen W H,Zhang B F. Optimization design of screw rotor with automatic dynamic balance of a screw vacuum pump[J]. Journal of Vibration and Shock,2015,34(19):144−149+156 (巫修海,陈文华,张宝夫. 螺杆真空泵自平衡螺杆转子优化设计[J]. 振动与冲击,2015,34(19):144−149+156(in chinese) doi: 10.13465/j.cnki.jvs.2015.19.023 Wu X H, Chen W H, Zhang B F. Optimization design of screw rotor with automatic dynamic balance of a screw vacuum pump[J]. Journal of Vibration and Shock, 2015, 34(19): 144-149+156 (in chinese) doi: 10.13465/j.cnki.jvs.2015.19.023 [9] Wang Y Q,Wang L,Liu M K,et al. Dynamic balance of fixed-pitch screw rotor vacuum pump a simulation and theoretical study[J]. Chinese Journal of Vacuum Science and Technology,2018,38(12):1039−1043 (王永庆,汪亮,刘明昆,等. 基于MATLAB/GUI的等螺距螺杆转子动平衡分析与计算[J]. 真空科学与技术学报,2018,38(12):1039−1043(in chinese) Wang Y Q, Wang L, Liu M K, et al. Dynamic balance of fixed-pitch screw rotor vacuum pump a simulation and theoretical study[J]. Chinese Journal of Vacuum Science and Technology, 2018, 38(12): 1039-1043 (in chinese) [10] 何贤举. 双螺杆泵B型转子动平衡研究[D]. 湖北: 华中科技大学, 2016 He X. Study on the Dynamic balancing of B-type twin-screw pump rotor[D]. Hubei: Huazhong University of Science and Technology, 2016 [11] Farzad Hejazi, Tan Kar Chun. Conceptual theories in structural dynamics[M]. Springer, Singapore [12] Wang J,Cui F,Wei S,et al. Study on a novel screw rotor with variable cross-section profiles for twin-screw vacuum pumps[J]. Vacuum,2017,145:299−307 doi: 10.1016/j.vacuum.2017.09.006 [13] Li D, He Z, Sun S, et al. Dynamic characteristics modelling and analysis for dry screw vacuum pumps[J]. Vacuum: Technology Applications & Ion Physics: The International Journal & Abstracting Service for Vacuum Science & Technology, 2022(198-) [14] 李斌. 立式LGB70变螺距螺杆真空泵设计[D]. 安徽: 合肥工业大学, 2021 Li B. Design of vertical LGB70 variable pitch screw vacuum pump[D]. Anhui: Hefei University of Technology, 2021 [15] Cui J K,Ding J L,Xia J. Secondary development of cylindrical spiral milling cutter based on solidworks[J]. software engineering,2022,25(8):30−33+6 (崔建昆,丁佳乐,夏娟. 基于SolidWorks的圆柱螺旋铣刀二次开发[J]. 软件工程,2022,25(8):30−33+6(in chinese) doi: 10.19644/j.cnki.issn2096-1472.2022.008.007 Cui J K, Ding J L, Xia J. Secondary development of cylindrical spiral milling cutter based on solidworks[J]. software engineering, 2022, 25(08): 30-33+6 (in chinese) doi: 10.19644/j.cnki.issn2096-1472.2022.008.007 [16] Hao L J,Gu H M,Zhu X. Development of parametric design system of reciprocating vacuum pump[J]. Vaccum,2011,48(1):54−56 (郝利军,顾海明,朱翔. 往复真空泵的参数化设计系统开发[J]. 真空,2011,48(1):54−56(in chinese) doi: 10.13385/j.cnki.vacuum.2011.01.031 Hao L J, Gu H M, Zhu X. Development of parametric design system of reciprocating vacuum pump. VACCUM, 2011, 48(01): 54-56 (in chinese) doi: 10.13385/j.cnki.vacuum.2011.01.031 [17] 蔡武豪. 基于SolidWorks的静压造型主机参数化设计研究[D]. 山东大学, 2021 Cai W H. Research on parametric design of air-flow-squeeze moding machine based on solidworks[D]. Shandong University, 2021 [18] Liu C J,Xu C H,Qian F H. Vibration monitoring and fault diagnosis of dry screw vacuum pump[J]. Chinese Journal of Vacuum Science and Technology,2005,25(6):471−474 (刘春姐,徐成海,钱芳华. 干式螺杆真空泵振动监测与故障诊断技术的研究[J]. 真空科学与技术学报,2005,25(6):471−474(in chinese) doi: 10.3969/j.issn.1672-7126.2005.06.017 Liu C J, Xu C H, Qian F H. Vibration monitoring and fault diagnosis of dry screw vacuum pump[J]. Chinese Journal of Vacuum Science and Technology, 2005, 25(6): 471-474 (in chinese) doi: 10.3969/j.issn.1672-7126.2005.06.017 [19] Shu X D,Chai X T,Gao M Y,et al. Design of automatic detection system for vacuum pump performance parameters based on PLC[J]. Chinese Journal of Vacuum Science and Technology,2021,41(10):923−928 (舒晓冬,柴晓彤,高明燚,等. 基于PLC的真空泵性能参数自动检测系统设计[J]. 真空科学与技术学报,2021,41(10):923−928(in chinese) doi: 10.13922/j.cnki.cjvst.202101023 Shu X D, Chai X T, Gao M Y, et al. Design of automatic detection system for vacuum pump performance parameters based on PLC[J]. Chinese Journal of Vacuum Science and Technology, 2021, 41(10): 923-928 (in chinese) doi: 10.13922/j.cnki.cjvst.202101023 [20] Li B,Gan S Y,Zhang J,et al. Modeling and balancing of variable pitch screw rotor based on actual clearance and boolean operation[J]. Chinese Journal of Vacuum Science and Technology,2021,41(5):425−429 (李斌,干蜀毅,张俊,等. 基于实际间隙与布尔运算的变螺距转子建模及其平衡[J]. 真空科学与技术学报,2021,41(5):425−429(in chinese) doi: 10.13922/j.cnki.cjvst.202006049 Li B, Gan S Y, Zhang J, et al. Modeling and balancing of variable pitch screw rotor based on actual clearance and boolean operation[J], Chinese Journal of Vacuum Science and Technology, 2021, 41(05): 425-429 (in chinese) doi: 10.13922/j.cnki.cjvst.202006049 [21] Gan S,Yu Q,Cao Q,et al. Coordinate transformation of screw rotor profile in different cross sections[J]. Vacuum,2021,192(2):110494 -
图( 9)
计量
- 文章访问数: 896
- HTML全文浏览数: 896
- PDF下载数: 8
- 施引文献: 0