
 首页
首页 登录
登录 注册
注册



 下载:
下载:
-
随着光电子技术的飞速发展, 基于Sagnac效应的光学陀螺仪因其测量精度高、动态范围广且结构简单等优势自提出来就被广泛应用于导航定位系统中[1–6]. 然而, 传统光学陀螺仪具有安全性、稳定性以及最终能够达到的测量精度等方面的问题, 限制了其在全球卫星及空间站导航定位系统中的进一步应用. 因此, 亟待发展高性能的光学陀螺仪, 为导航定位系统中目标空间载体的姿态测量奠定坚实的基础. 根据量子力学理论, 在理想的光子数压缩和频率一致纠缠状态下, 测量脉冲信号传播时延的精度将突破经典光源的散粒噪声极限, 达到量子力学的海森伯极限[7–9]. 频率纠缠光源具有不受引力环境影响的关联特性[10]以及非局域色散消除特性[11,12], 将其作为量子陀螺仪的输入光源, 不仅能够提高旋转角速度的测量精度, 而且更适用于深空探测的量子导航定位系统[13–15]. 基于此, 以纠缠光源作为光学陀螺仪的输入光源, 并结合光学干涉仪对输出信号进行探测, 可以实现高精度的旋转角速度测量, 对量子陀螺仪在空间定位和导航传感领域的发展应用具有重大意义.
Sagnac效应是指当两束光在同一闭合环路里相向传输, 在输出端会产生一个与闭合环路旋转角速度正相关的时延信号, 通过测量该时延信号, 可以实现旋转角速度的测量[16]. 基于频率纠缠双光子的Hong-Ou-Mandel (HOM)干涉仪作为一种超高分辨率和低探测噪声的时延测量方案, 自提出以来就被广泛应用在量子精密测量、量子层析干涉及量子通信等领域[17–24]. 利用Sagnac效应可以将旋转角速度引起的时延差引入到HOM干涉仪的测量臂, 通过时延差的测量实现角速度的测量. 对于标准HOM干涉仪, 干涉图谱凹陷(符合计数率最低处)与干涉仪两臂之间的时延差存在唯一对应关系, 因此, 利用标准HOM干涉图谱仅能估计出单个时延参数, 具有一定的局限性, 无法满足多参量测量系统的应用需求. 基于此, 级联HOM干涉仪被提出, 通过在标准HOM干涉仪中级联多个50∶50分束器, 实现HOM干涉图谱凹陷的扩展, 且多个凹陷与干涉仪测量臂中多个时延差参数存在对应关系, 可以同时估计出多个独立时延参数的值[25]. 三轴旋转角速度测量作为陀螺仪的核心需求, 其测量方式和测量精度直接影响着空间载体姿态信息的准确性. 因此, 将具有高时延分辨率和多时延参数标定特征的级联HOM干涉仪作为量子陀螺仪的探测方案, 可以实现三轴旋转速度的高精度测量.
基于上述研究背景, 本文提出了基于频率纠缠双光子和级联HOM干涉仪的量子陀螺仪. 首先, 构建级联HOM干涉仪, 分析干涉图谱的特征参数干涉可见度和干涉半高全宽; 其次, 根据量子Fisher信息和Cramer-Rao bound理论, 对多个独立时延参数的测量精度进行讨论; 最后, 依据角速度与时延参数的对应关系, 实现三轴角速度的高精度测量.
-
图1(a)所示为频率纠缠双光子源的制备过程, 中心波长为788 nm、带宽为3 nm的飞秒脉冲激光经过一个半波片调节其偏振状态, 之后入射到长度为2 mm的非线性PPKTP晶体, 相互作用满足扩展相位匹配条件, 通过自发参量下转换过程制备出偏振正交的频率一致纠缠双光子, 输入到偏振分束器中将信号光s和闲置光i分开. 同时, 利用分色镜(DM)滤除剩余的泵浦光. 图1(b)是具有三轴旋转角速度的空间目标, 利用Sagnac效应将角速度转换成信号光s和闲置光i到达级联HOM干涉仪中不同50∶50分束器(50∶50 BS)处的时延差. 图1(c)是基于频率纠缠双光子的三级级联HOM干涉装置. 标准HOM干涉仪后再级联两个50∶50 BS, 信号光s和闲置光i经过3个50∶50 BS后进入到单光子探测器D1和D2, 输出信号利用直接符合测量装置进行二阶量子干涉测量. 利用级联HOM干涉仪测量三轴角速度的工作原理如下: 频率纠缠双光子的信号光s在级联HOM干涉仪的上测量臂中传输, 经过3个50∶50 BS后到达D1, 由于Sagnac效应的存在, 旋转角速度
$( {\varOmega }_{x} $ ,$ {\varOmega }_{y} $ ,$ {\varOmega }_{z})$ 分别被转换成测量臂中的时延差($ {\tau }_{1} $ ,$ {\tau }_{2} $ ,$ {\tau }_{3} $ ); 闲置光i在级联HOM干涉仪的下参考臂中传输, 经过3个50∶50 BS后到达D2, 其中在第1个50∶50 BS前的参考臂设置一个可调时延装置, 用以扫描上测量臂和下参考臂之间的时延差, 从而实现信号光s和闲置光i之间的二阶量子干涉符合测量.标准HOM干涉仪中, 信号光s和闲置光i分别在测量臂和参考臂中传输, 入射第1个50∶50 BS上进行二阶量子干涉, 利用符合测量装置测得标准HOM干涉图谱. 根据Sagnac效应理论, 信号光s和闲置光i沿着同一光纤环路相向运动, 由于旋转使得它们传输一周的时间不同从而产生一个与角速度成正比的时延差, 可以写为[26]
其中,
$ r $ 是光纤环路的半径,$ k $ 是光纤环路的匝数,$ c $ 是光速,$ {\varOmega }_{x} $ 是$ x $ 轴的旋转角速度.当光纤环路静止时(此时
$ {\tau }_{1}=0 $ ), 信号光s和闲置光i同时到达50∶50 BS, 此时扫描$ \tau $ , 得到一个标准HOM干涉图谱, 频率纠缠双光子符合计数率最小值与传输路径中时延差零值之间存在唯一对应关系, 也就是一个凹陷. 当光纤环路存在旋转角速度$ {\varOmega }_{x} $ 时, 信号光s和闲置光i之间由于旋转导致的Sagnac效应使得测量臂中引入一个时延差$ {\tau }_{1}\ne 0 $ , 此时再次扫描$ \tau $ , 得到的标准HOM干涉图谱中的凹陷发生了偏移, 根据Mandel干涉, 此时频率纠缠双光子的符合计数率可以表达为其中,
$ A\left({\omega }_{{\mathrm{s}}}, {\omega }_{{\mathrm{i}}}\right) $ 和$ A\left({\omega }_{{\mathrm{i}}}, {\omega }_{{\mathrm{s}}}\right) $ 是纠缠双光子的频谱函数. 通过测量标准HOM干涉图谱凹陷的时延偏移值, 则可得到角速度$ {\varOmega }_{x} $ .级联HOM干涉仪中, 信号光s和闲置光i分别在测量臂和参考臂中传输, 经过两个50∶50 BS后入射第3个50∶50 BS上进行二阶量子干涉. 当光纤环路存在三轴角速度(
$ {\varOmega }_{x} $ ,$ {\varOmega }_{y} $ ,$ {\varOmega }_{z} $ )时, 信号光s和闲置光i经过不同的50∶50 BS, 由于旋转导致的Sagnac效应将三轴角速度引起的时延差($ {\tau }_{1} $ ,$ {\tau }_{2} $ ,$ {\tau }_{3} $ )分别引入到相应的测量臂中, 通过扫描$ \tau $ , 得到级联HOM干涉图谱, 此时频率纠缠双光子的符合计数率可以表达为[27]扫描可调时延装置
$ \tau $ , 得到级联HOM干涉图谱, 其中存在3组对称凹陷, 且与三轴角速度成对应关系, 通过分别测量凹陷位置处的时延值, 就可以得到三轴角速度.量子度量学中, 量子Fisher 信息通过分析估计参数中所包含信息的大小给定了量子测量精度极限. 量子Fisher信息越大, 则参数测量精度越高[28,29]. 因此, 为了分析HOM干涉仪中时延差的测量精度极限, 定义时延参数的量子Fisher信息为[17]
其中,
$ \alpha $ 和$ \sigma $ 分别是HOM干涉图谱凹陷的可见度和半高全宽,$ \gamma $ 是光子损耗率.根据Cramer-Rao bound和最大似然估计理论可知, 时延值
$ \tau $ 的测量极限估计值可表示为[30,31]其中,
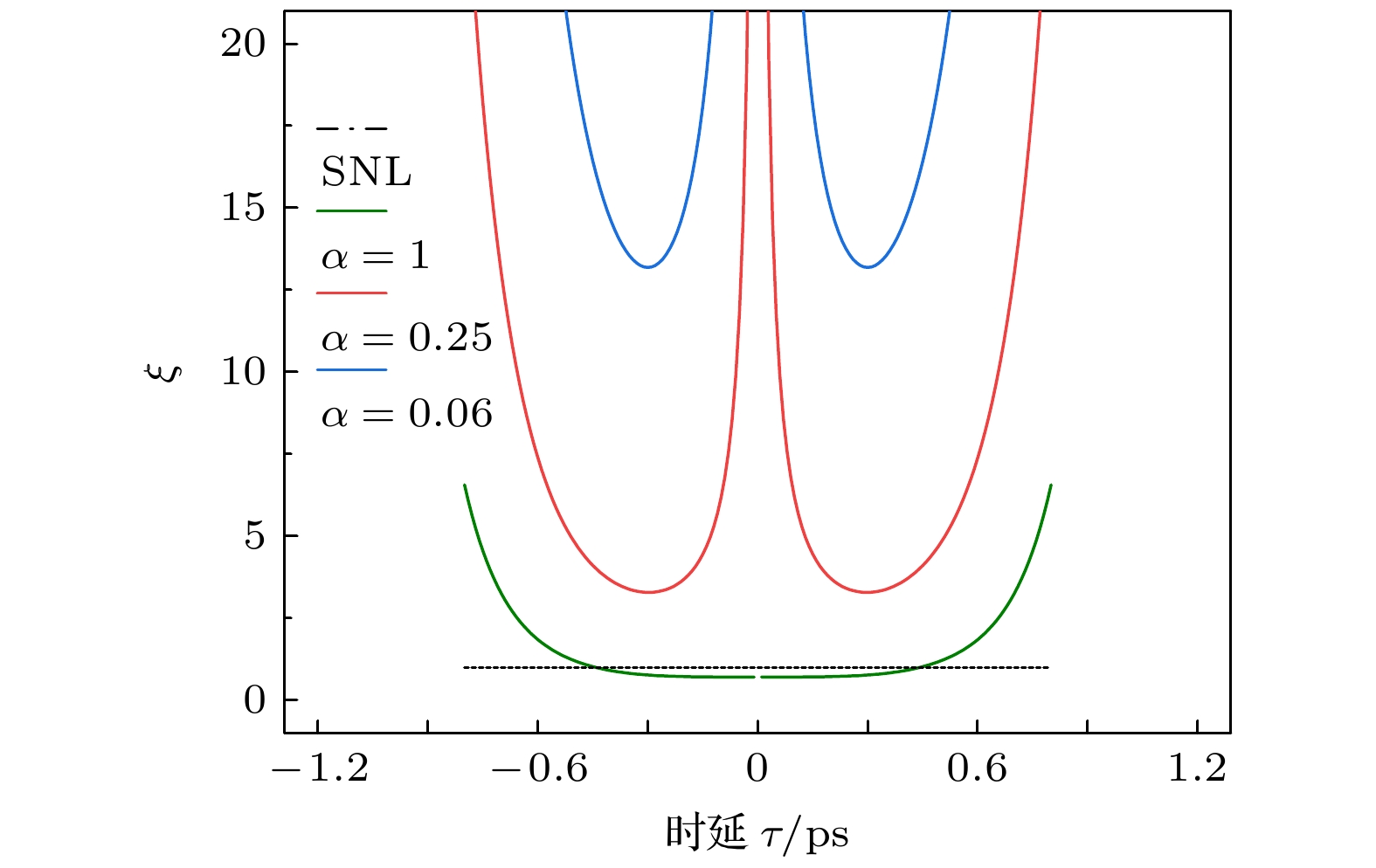
$ \tilde{\tau } $ 表示时延值$ \tau $ 的估计量,$ N $ 是实验重复测量的次数. 因此, 当$ N $ 无穷大时, 时延值测量偏差为0.$ F $ 值越大, 则时延值$ \tau $ 所能达到的测量精度越高.假设时延值不确定度可以表示为
当
$ \xi < 1 $ 时, 证明时延值测量精度可超越散粒噪声极限(shot-noise limit, SNL), 即可实现角速度的高精度测量. -
根据(2)式和(3)式, 得出标准HOM干涉仪和级联HOM干涉仪的二阶量子干涉图谱, 如图2所示. 图2(a)是标准HOM干涉图谱, 存在一个凹陷, 干涉可见度
$ \alpha $ 为1, 干涉半高全宽$ \sigma $ 为0.3 ps. 图2(b)中, 通过假定$ {\tau }_{2}=5\;{\mathrm{p}}{\mathrm{s}} $ 和$ {\tau }_{3}=10\;{\mathrm{p}}{\mathrm{s}} $ , 得到级联HOM干涉仪的二阶量子干涉图谱, 可以看出存在3组对称凹陷, 其对应的时延值分别为($ \pm \left({\tau }_{3}+{\tau }_{2}\right) $ ,$ \pm {\tau }_{2} $ ,$ \pm \left({\tau }_{3}-{\tau }_{2}\right) $ ), 相应的干涉可见度$ \alpha $ 分别为(0.06, 0.25, 0.06), 干涉半高全宽$ \sigma $ 保持不变, 都为0.3 ps. 同时, 对称凹陷中间点时延值对应的是第1个50∶50 BS两臂平衡时的时延差, 也就是时延值$ {\tau }_{1} $ . 因此, 基于级联HOM干涉仪的二阶量子干涉图谱, 可以实现3个独立时延差($ {\tau }_{1} $ ,$ {\tau }_{2} $ ,$ {\tau }_{3} $ )的测量. 同时, 基于相位测量方法的光学陀螺仪方案中由于相位包裹问题的存在, 动态测量范围受限于光源波长的一半, 而基于HOM干涉时延测量方法的量子陀螺仪方案可以避免相位包裹问题, 动态测量范围取决于HOM干涉半高全宽的一半, 在相同光源条件下, 动态测量范围可提高约1000倍.根据(4)式, 当干涉半高全宽
$ \sigma =0.3\;{\mathrm{p}}{\mathrm{s}} $ , 光子损耗率$ \gamma =0 $ 时, 可以得到不同干涉可见度$ \alpha $ 下量子Fisher信息F随时延τ的变化, 如图3所示. 可以看出, 干涉可见度$ \alpha =1 $ 时, 时延差$ {\tau }_{1} $ 的最大量子Fisher信息F接近于2; 干涉可见度$ \alpha =0.25 $ 时, 时延差$ {\tau }_{2} $ 的最大量子Fisher信息F为0.1; 干涉可见度$ \alpha=0.06 $ 时, 时延差$ {\tau }_{3} $ 的最大量子Fisher信息F为0.006. 由于HOM干涉可见度的降低导致时延值的量子Fisher信息较小, 后续可以通过使用不同的纠缠光源作为量子陀螺仪的输入, 比如高纠缠态以及多模态等[32,33], 进一步增加量子Fisher信息, 从而获得更高的时延值测量精度.为便于直观比较, 根据(6)式, 假设是单次测量(
$ N=1 $ ), 对基于级联HOM干涉的时延测量方案与经典方案理论极限作比较, 如图4所示. 当HOM干涉可见度$ \alpha $ 为1时, 参数$ \xi $ 最小值为0.707, 则时延差$ {\tau }_{1} $ 的测量精度在0.9 ps测量范围内超越散粒噪声极限SNL. 当HOM干涉可见度$ \alpha $ 为0.25和0.06时, 参数$ \xi $ 最小值分别为3.2和13.19, 此时时延差$ {\tau }_{2} $ 和时延差$ {\tau }_{3} $ 未能超越散粒噪声极限, 之后可以通过改变输入光源特性增加时延值的量子Fisher信息值来提高测量精度极限.基于频率纠缠双光子和级联HOM干涉的量子陀螺仪, 可以通过单个干涉仪实现三轴角速度的高精度测量, 降低整体测量系统的复杂性并优化其集成度, 且具有较宽的动态测量范围. 虽然目前方案的整体测量精度仍未超越经典测量极限, 但是在后续的研究中, 将通过优化输入态纠缠特性和改进光学干涉仪结构等方法进一步提高三轴角速度的测量精度, 可以提高空间载体信息的准确性, 为导航传感系统提供一定的支持.
-
本文利用级联HOM干涉仪的高时延分辨率和多时延测量特征, 提出了三轴角速度测量的量子陀螺仪方案. 以频率纠缠双光子作为级联HOM干涉仪的输入光源, 利用Sagnac效应将三轴角速度存在所产生的时延差引入到干涉仪相应的测量臂, 分析级联HOM干涉图谱中多组对称凹陷的干涉可见度和干涉半高全宽, 并结合量子Fisher信息, 得到3个独立时延差
$ {\tau }_{1}, {\tau }_{2} $ 和$ {\tau }_{3} $ 的最大量子Fisher信息值. 利用量子Fisher信息随时延的变化, 分析3个独立时延差的不确定度, 证明测量精度可以超越散粒噪声极限. 同时, 根据时延差与角速度的关系, 可以验证基于频率纠缠双光子和级联HOM干涉的量子陀螺仪方案可行性, 为量子传感导航和量子精密测量的进一步发展提供理论基础.
基于频率纠缠双光子和级联Hong-Ou-Mandel干涉的量子陀螺仪理论研究
Theoretical research on quantum gyroscope based on frequency entangled biphoton and cascaded Hong-Ou-Mandel interference
-
摘要: 高时延分辨率的Hong-Ou-Mandel(HOM)干涉仪一直是量子精密测量领域的研究热点, 将其应用到量子陀螺仪中可以实现突破经典理论极限的角速度测量. 本文提出了基于频率纠缠双光子和级联HOM干涉仪的量子陀螺仪方案. 利用信号光和闲置光之间由于旋转存在的Sagnac效应, 将三轴角速度分别引入到级联HOM干涉仪中的对应测量臂, 利用级联HOM干涉图谱中凹陷位置与多个独立时延差之间的对应关系, 结合干涉可见度与量子Fisher信息理论, 得到3个独立时延差($ {\tau }_{1} $, $ {\tau }_{2} $, $ {\tau }_{3} $)的最大量子Fisher信息分别为(2, 0.1, 0.006). 通过引入测量不确定度, 得出时延值测量精度可以突破散粒噪声极限, 并结合时延差与旋转角速度的关系, 可实现三轴角速度的测量, 且测量精度可以超越经典光学陀螺仪, 方案可为后续量子陀螺仪在全球导航传感领域的进一步应用提供理论支持.
-
关键词:
- 级联Hong-Ou-Mandel干涉 /
- 频率纠缠双光子 /
- 量子陀螺仪
Abstract: The optical gyroscope for measuring the attitude information of spatial carriers, has emerged as a research hotspot in inertial navigation system. Real-time measurement of rotation angular velocity is crucial for obtaining accurate attitude information. However, the measurement accuracy of traditional optical gyroscope is limited by the short noise limit (SNL), which restricts its further applications. Existing research indicates that the quantum technology is needed to address the measurement limitations of traditional optical gyroscopes. A triaxial rotation angular velocity measurement scheme based on frequency entangled biphoton and cascaded Hong-Ou-Mandel (HOM) interference is proposed in this study. By using the Sagnac effect induced by the rotation between signal and idler photons, the triaxial angular velocity is introduced into the corresponding measurement arm of a cascaded HOM interferometer. The cascaded HOM interferogram is obtained using a coincidence measurement device, and the relationship between the symmetric dip position and the three independent time delay difference is analyzed. The characteristic parameters of HOM interferogram, including a half-height full width (FWHM) of 0.3 ps and visibilities of 1, 0.25 and 0.06, respectively, are obtained. According to quantum Fisher information theory, the maximum quantum Fisher information values of the three independent time delay differences ($ {\tau }_{1} $, $ {\tau }_{2} $, $ {\tau }_{3} $) are calculated to be 1, 0.1, and 0.006, respectively. Furthermore, by incorporating measurement uncertainty, it is demonstrated that the accuracy of the time delay measurement can exceed the SNL. Combined with the relationship between time delay and angular velocity, the results show that the angular velocity measurement accuracy exceeds that of classical optical gyroscopes. Therefore, this scheme provides a theoretical foundation for further applying quantum gyroscopes to global navigation sensing and precision measurement systems. -

-
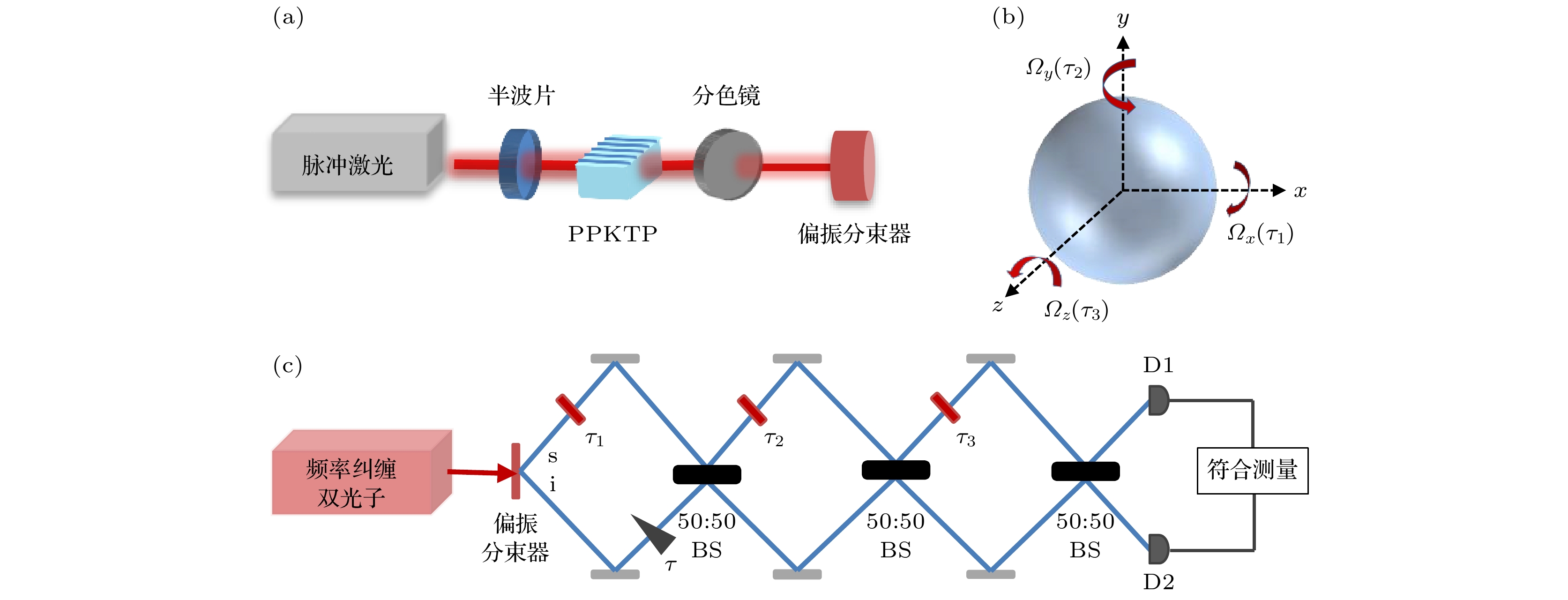
图 1 (a) 频率纠缠双光子源; (b) 旋转空间目标; (c) 基于频率纠缠双光子的级联HOM干涉仪原理框图
Figure 1. (a) Frequency entangled biphoton source; (b) rotation space target; (c) diagram of cascaded HOM interferometer based on frequency entangled biphoton.
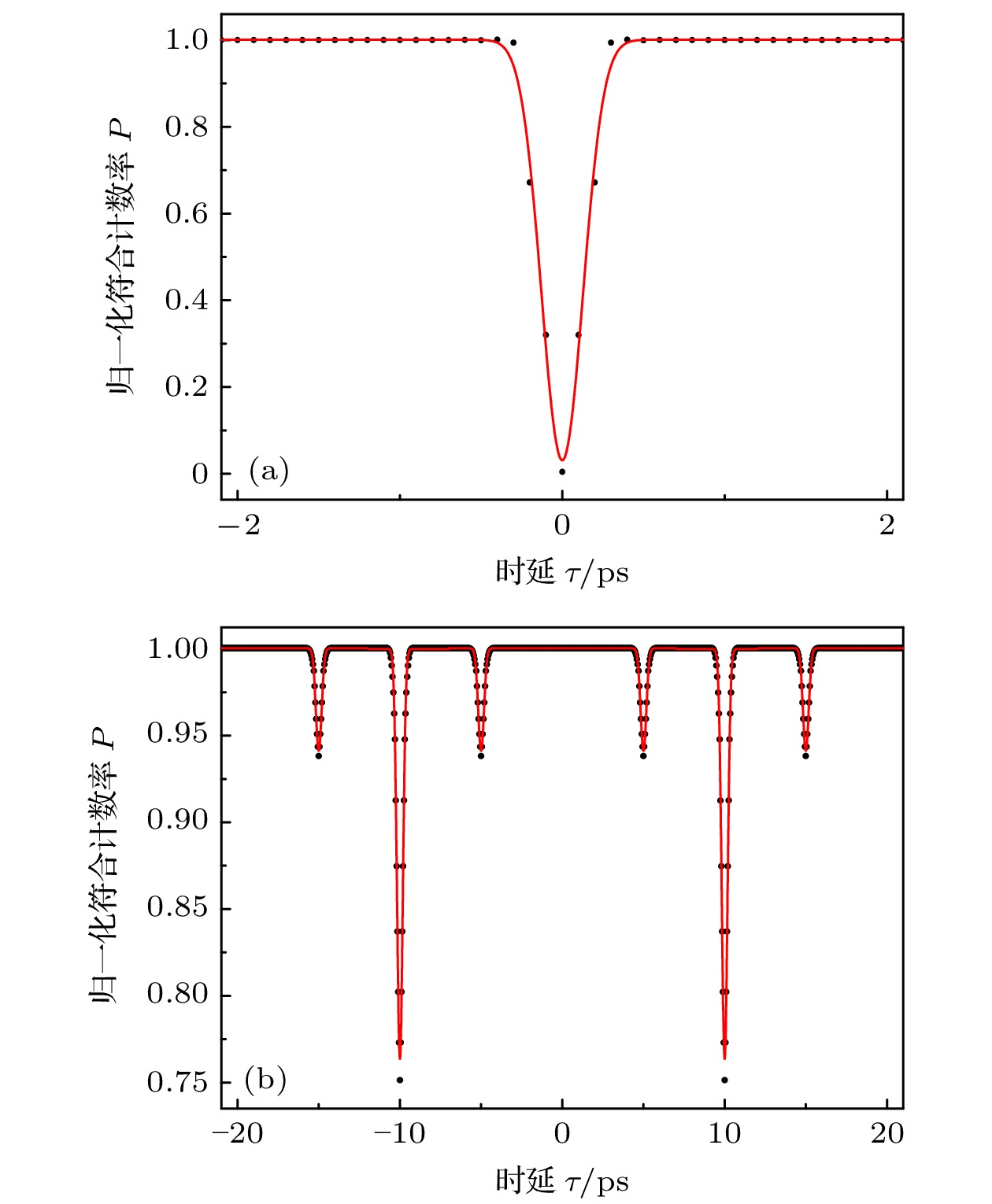
图 2 (a) 频率纠缠双光子的标准HOM干涉图谱; (b) 级联HOM干涉图谱
Figure 2. (a) Standard HOM interferogram of frequency entangled biphoton; (b) the cascaded HOM interferogram.
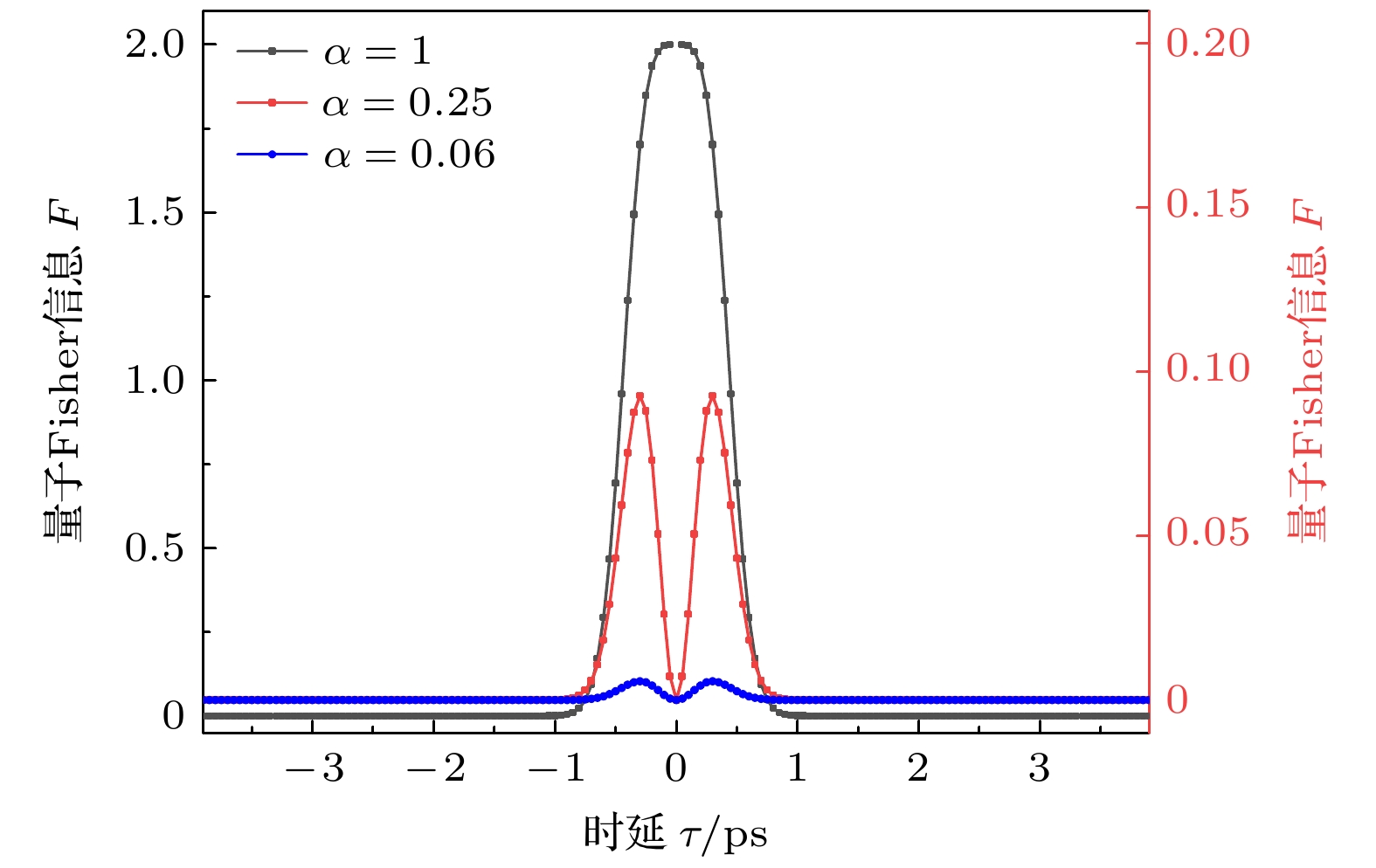
图 3
$ \sigma =0.3\;{\mathrm{p}}{\mathrm{s}} $ 时, 不同干涉可见度$ \alpha $ 值下$ F $ 随$ \tau $ 的变化Figure 3. Variation of quantum Fisher information
$ F $ with time delay$ \tau $ in different interference visibility$ \alpha $ at$ \sigma =0.3\;{\mathrm{p}}{\mathrm{s}} $ . -
[1] Toland J R E, Search C P 2013 Appl. Phys. B 114 333 doi: 10.1007/s00340-013-5520-4 [2] Aghaie K Z, Digonnet M J F 2015 J. Opt. Soc. Am. B 32 339 doi: 10.1364/JOSAB.32.000339 [3] 陈坤, 陈树新, 吴德伟, 杨春燕, 吴昊 2016 物理学报 65 054203 doi: 10.7498/aps.65.054203 Chen K, Chen S X, Wu D W, Yang C Y, Wu H 2016 Acta Phys. Sin. 65 054203 doi: 10.7498/aps.65.054203 [4] Lefèvre H C 2014 C. R. Physique 15 851 doi: 10.1016/j.crhy.2014.10.007 [5] Sultana J 2014 Gen. Relat. Gravti. 46 1710 doi: 10.1007/s10714-014-1710-6 [6] Courtney T L, Park S D, Hill R J, Cho B, Jonas D M 2014 Opt. Lett. 39 513 doi: 10.1364/OL.39.000513 [7] Giovannetti V, Lloyd S, Maccone L 2001 Nature 412 417 doi: 10.1038/35086525 [8] Dowling J P 2008 Contemp. Phys. 49 125 doi: 10.1080/00107510802091298 [9] Kura N, Ueda M 2020 Phys. Rev. Lett. 124 010507 doi: 10.1103/PhysRevLett.124.010507 [10] Fink M, Rodriguez-Aramendia A, Handsteiner J, Ziarkash A, Steinlechner F, Scheidl T, Fuentes I, Pienaar J, Ralph T C, Ursin R 2016 Nat. Commun. 8 15304 doi: 10.1038/ncomms15304 [11] O'Donnell K A 2011 Phys. Rev. Lett. 106 063601 doi: 10.1103/PhysRevLett.106.063601 [12] Baek S Y, Cho Y W, Kim Y H 2009 Opt. Express 17 19241 doi: 10.1364/OE.17.019241 [13] Kolkiran A, Agarwal G S 2007 Opt. Express 15 6798 doi: 10.1364/OE.15.006798 [14] Fink M, Steinlechner F, Handsteiner J, Dowling J P, Scheidl T, Ursin R 2019 New J. Phys. 21 053010 doi: 10.1088/1367-2630/ab1bb2 [15] Silvestri R, Yu H C, Stromeberg T, Hilweg C, Peterson R W, Walther P 2024 Sci. Adv. 10 0215 doi: 10.1126/sciadv.ado0215 [16] Scully M O, Zubairy M S 1997 Quantum Optics (Cambridge University Press) pp271–290 [17] Lyons A, Knee G C, Bolduc E, Thomas R, Leach J, Gauger E M, Faccio D 2018 Sci. Adv. 4 9416 doi: 10.1126/sciadv.aap9416 [18] Chen Y Y, Fink M, Steinlechner F, Torres J P, Ursin R 2019 npj Quantum Inform. 5 43 doi: 10.1038/s41534-019-0161-z [19] Valencia A, Scarcelli G, Shih Y H 2004 Appl. Phys. Lett. 85 2655 doi: 10.1063/1.1797561 [20] 徐耀坤, 孙仕海, 曾瑶源, 杨俊刚, 盛卫东, 刘伟涛 2023 物理学报 72 214207 doi: 10.7498/aps.72.20231242 Xu Y K, Sun S H, Zeng Y Y, Yang J G, Sheng W D, Liu W T 2023 Acta Phys. Sin. 72 214207 doi: 10.7498/aps.72.20231242 [21] 罗一振, 马洛嘉, 孙铭烁, 吴思睿, 邱丽华, 王禾, 王琴 2024 物理学报 73 240302 doi: 10.7498/aps.73.20241269 Luo Y Z, Ma L J, Sun M S, Wu S R, Qiu L H, Wang H, Wang Q 2024 Acta Phys. Sin. 73 240302 doi: 10.7498/aps.73.20241269 [22] Liu R, Kong L J, Wang Z X, Si Y, Qi W R, Huang S Y, Tu C H, Li Y N, Wang H T 2018 Chin. Phys. Lett. 35 090303 doi: 10.1088/0256-307X/35/9/090303 [23] Ma L J, Sun M S, Zhang C H, Ding H J, Zhou X Y, Li J, Wang Q 2025 Chin. Phys. B 34 010301 doi: 10.1088/1674-1056/ad8871 [24] Gao W L, Xu L P, Zhang H, Yan B, Li P X, Hu G T 2023 Chin. Phys. B 32 050304 doi: 10.1088/1674-1056/ac9fc3 [25] Yang Y, Xu L P, Giovannetti V 2019 Phys. Rev. A 100 063810 doi: 10.1103/PhysRevA.100.063810 [26] Post E J 1967 Rev. Mod. Phys. 39 475 doi: 10.1103/RevModPhys.39.475 [27] 翟艺伟, 董瑞芳, 权润爱, 项晓, 刘涛, 张首刚 2021 物理学报 70 120302 doi: 10.7498/aps.70.20210071 Zhai Y W, Dong R F, Quan R A, Xiang X, Liu T, Zhang S G 2021 Acta Phys. Sin. 70 120302 doi: 10.7498/aps.70.20210071 [28] Braunstein S L, Caves C M 1994 Phys. Rev. Lett. 72 3439 doi: 10.1103/PhysRevLett.72.3439 [29] 任志红, 李岩, 李艳娜, 李卫东 2019 物理学报 68 040601 doi: 10.7498/aps.68.20181965 Ren Z H, Li Y, Li Y N, Li W D 2019 Acta Phys. Sin. 68 040601 doi: 10.7498/aps.68.20181965 [30] Zwierz M, Pérez-Delgado C A, Kok P 2010 Phys. Rev. Lett. 105 180402 doi: 10.1103/PhysRevLett.105.180402 [31] Giovannetti V, Lloyd S, Maccone L 2006 Phys. Rev. Lett. 96 010401 doi: 10.1103/PhysRevLett.96.010401 [32] Guo Y, Yang Z X, Zeng Z Q, Ding C L, Shimizu R, Jin R B 2023 Opt. Express 31 32849 doi: 10.1364/OE.501645 [33] Kok P, Dunningham J, Ralph J F 2017 Phys. Rev. A 95 012326 doi: 10.1103/PhysRevA.95.012326 -
计量
- 文章访问数: 794
- HTML全文浏览数: 794
- PDF下载数: 14
- 施引文献: 0