
 首页
首页 登录
登录 注册
注册





-
进入、下降与着陆(Entry, descent and landing,EDL)是整个火星探测任务中最关键的一个阶段,直接决定整个任务的成败[1-3],未来的大型火星探测器需要更大尺寸的气动面保证减速效果,目前的减速器技术已接近性能极限[4-5],运载火箭对载荷体积的限制使得可折叠封装的新型减速器技术受到国内外机构和学者的高度关注[6-7]。
上世纪60年代,NASA开始了可展开式减速器的研究,提出自适应可展开进入及定位技术(ADEPT)[8],Cassell等[9-10]评估了ADEPT的可行性,分析了ADEPT技术用于小型卫星任务的优势,Salotti[11]对发射器尺寸展开研究,以最大限度地降低成本,Peacocke等[12]使用进入轨迹模拟器分析了对可展开航空减速器的灵活性对轨迹和配置设计的影响,侯向阳等[13]研究了超大型可展开耐热结构的气动减速性能,以实现空间站有效载荷的有效下降。Danielle等[14]对进入大气层的机械可展开减速器进行动力学分析,提出减速器的迎风面至少需要八根辐条作为稳定支撑,张鹏等[15]设计了一种八棱台柔性外形的半刚性可展开式减速器,陈子杰等[16]提出一种基于7R-6R双回路单元的新型可展机构,Soutis等[17]研究利用减速器自转产生的离心力来展开和加固柔性隔热罩,史明东等[18]分析了可展开式超音速气动减速器的模态特性。
未来的半刚性可展开减速器往大型化、轻量化方向发展,辐条的抗弯刚度随尺寸的增大而降低,辐条的变形会降低柔性耐烧蚀蒙皮的平整度进而影响整体减速效果[19],且增大杆件截面会导致整体质量增加,降低有效载荷比,因此,替换或加入预张紧柔性构件是一种可以在保证整体结构轻量化的同时提升大尺寸空间结构抗弯刚度的新方法。李丽芳等[20]设计了一种空间超大型可展开柔性聚光器。Sudarshan等[21]提出了一种由预张紧柔索和支柱组成的预张紧整体结构。高明星等[22]设计了一种带预张紧柔索的可展开三棱柱伸展臂。史创等[23]提出一种新型索撑张紧天线机构,并进行多目标优化。肖航等[24-25]基于等效模型对柔性天线框架的刚度进行了分析,提出了一种反应绳索真实张紧、松弛状态的结构受力变形计算方法。
本文设计出一种具有刚度自适应性的可展开伞状减速装置,通过合理布置预张紧柔索使辐条的抗弯刚度随外界气动载荷的增大而增强。基于载荷方程建立减速装置支撑结构的理论模型,研究刚度自适应性的作用原理。利用有限元分析软件创建无索与含索减速装置的对照模型,验证含索减速装置的刚度自适应性。推导运动微分方程,搭建虚拟样机模型分析减速装置展开过程,为深空探测领域大型可展开式减速器的轻量化设计提供了一种新思路。
-
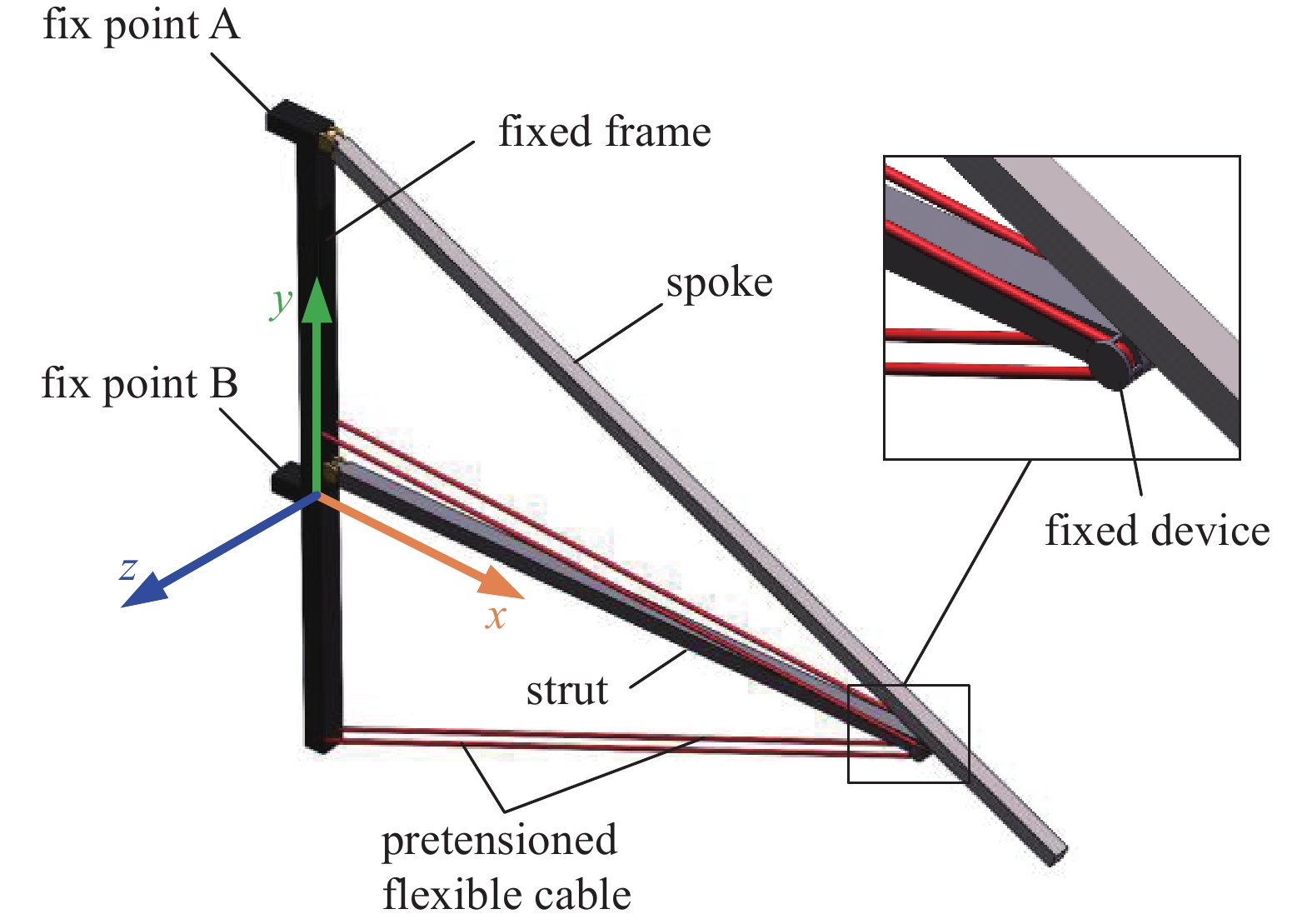
根据航天领域空间结构的设计要求,大型可展开式减速装置必须具有结构简单、大折展比等特点,如图1(a)所示,所设计的可展单元由辐条EF、连接杆BD、滑块B、预张紧柔索ADC与机架CE构成,松弛的柔索一端固定在A点,另一端穿过D点处的固定机构与C点固定连接,根据式(1)计算得到机构的自由度F为1。
式中,
$n$ 为活动构件数;$p_{1}$ 为低副数;$p_{{\text{h}}}$ 为高副数。如图1(b)所示,当可展单元完全展开后,锁死滑块使其变为固定铰链支座,调整预张紧柔索初始长度,使预张紧柔索在展开后处于张紧状态;设置lAB<lBC,使张紧的预张紧柔索对辐条的弯曲变形起阻碍作用;调节lAB与lBC的比值,使预张紧柔索的伸长率随辐条弯曲变形的增大而增大,对辐条弯曲变形的阻碍作用随辐条弯曲变形的增大而增强,赋予辐条一定的刚度自适应性,在保证轻量化的前提下提升辐条的抗弯刚度。
如图2所示,可展单元通过连接架上的连接点A、连接点B固定安装在主体上,为避免与连接杆运动相互干扰,在可展单元两侧对称设置两根相同的预张紧柔索,同时双柔索的设计能够增强刚度自适应性的作用效果。
-
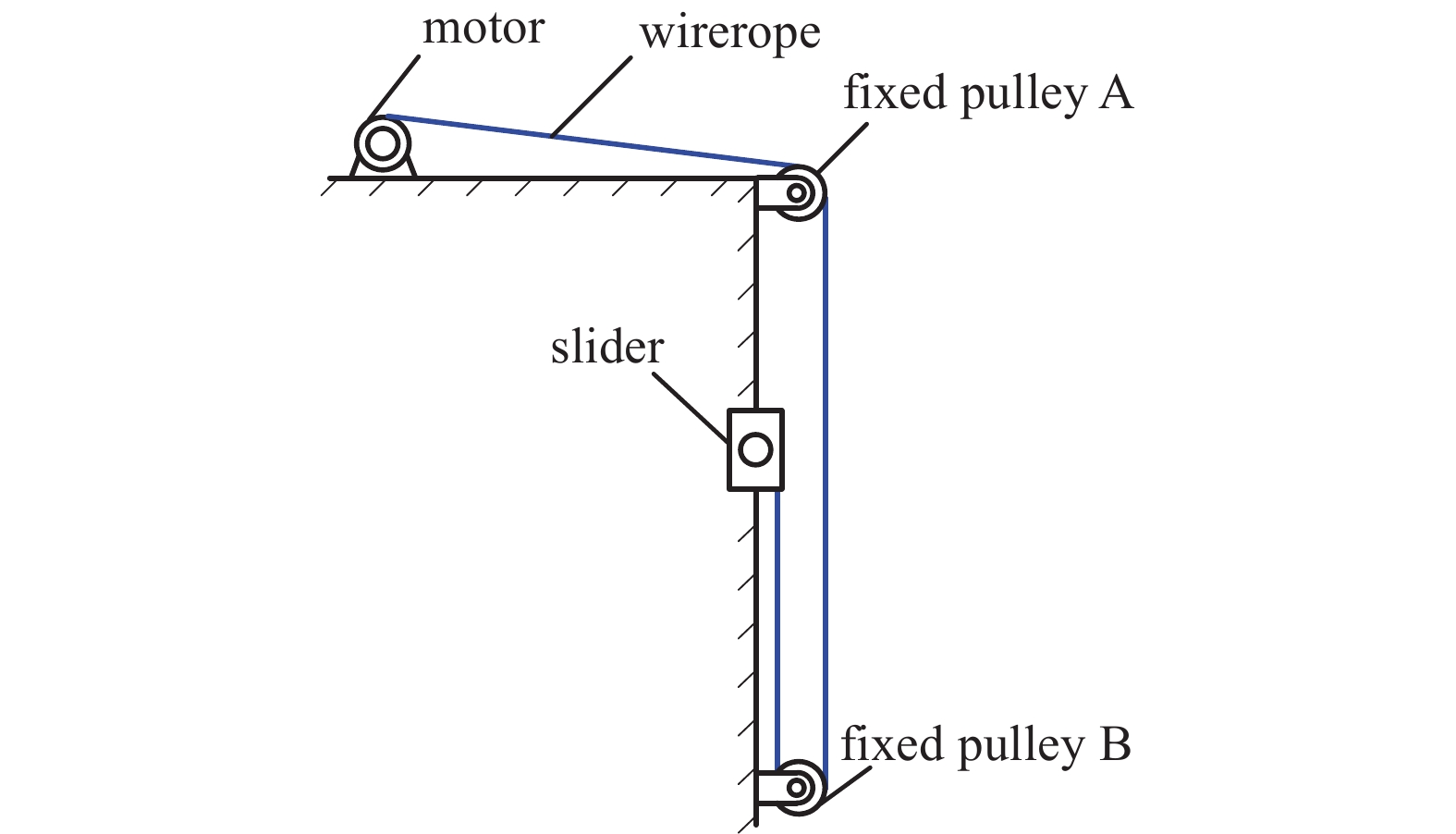
根据减速装置在火星探测任务中只实现一次展开的特点,设计电动机驱动、绳索传动构成的单向驱动机构,进一步实现减速装置的轻量化设计。如图3所示,电动机带动钢丝绳经定滑轮A、定滑轮B两次变向拉动滑块单向运动。
如图4(a)所示,为保证多组可展单元同步展开,采用驱动环作为共用滑块[19],驱动环嵌套在主体上,沿圆柱侧面滑动。主体侧面采用完整、光滑表面,沿主体周向均匀布置4组单向驱动机构,设置钢丝绳、连接杆与驱动环的连接点交错分布,使驱动环受力均匀,保证了运动平稳性。
如图4(b)所示,主体特征为抽壳圆柱,在主体开口端设置一圈加强层,为定滑轮B提供安装位置的同时提高主体刚度,在主体的内表面进行结构优化,主体内侧的圆柱底面与侧面为骨架加强结构,在保证刚度的前提下对主体进行轻量化。
-
12组可展单元通过连接架固定安装在主体上,连接架下端通过连接环连接成一个整体,如图5(a)所示,驱动环位于主体与12组连接架之间,在主体与连接架约束下驱动环自由度为1,保证驱动环只沿主体轴线方向往复运动;驱动环外齿穿过连接架上的方槽与连接杆一端铰接,驱动环作为公用滑块保证12组连接杆的同步运动,实现12组可展单元的同步展开。
折叠状态下,驱动环锁死在主体顶端,预张紧柔索处于松弛状态,此时减速装置最大直径小于运载火箭整流罩尺寸限制[11],符合发射要求。如图5(b)所示,在收到展开命令后,电动机拉动驱动环运动,推动12组可展单元同步展开,减速装置完全展开时预张紧柔索处于张紧状态。
在减速装置外侧安装刚性防热头锥和柔性耐烧蚀蒙皮(TPS)[26],折叠封装的减速装置在进入火星大气前展开,此时在零重力的真空环境下,减速装置展开过程中受到的阻力非常小。如图6(a)所示,完全展开后的气动面为正12棱台,最大直径12.78 m,半锥角70°。如图6(b)所示,主体采用抽壳圆柱体,保证减速装置自身结构独立,在EDL阶段完成后可以选择解除与探测器的连接将整个减速装置丢弃。
-
基于静力学平衡方程两次积分可得到辐条各点挠度的解析解,但由于变形过程中截面惯性矩的变化和由此产生的复杂性,需要使用模拟器多次迭代才能得到较为精确的结果[12],因此,将辐条建模为欧拉伯努利梁,施加最简单的均布载荷,并假设辐条弯曲变形过程中截面保持不变。
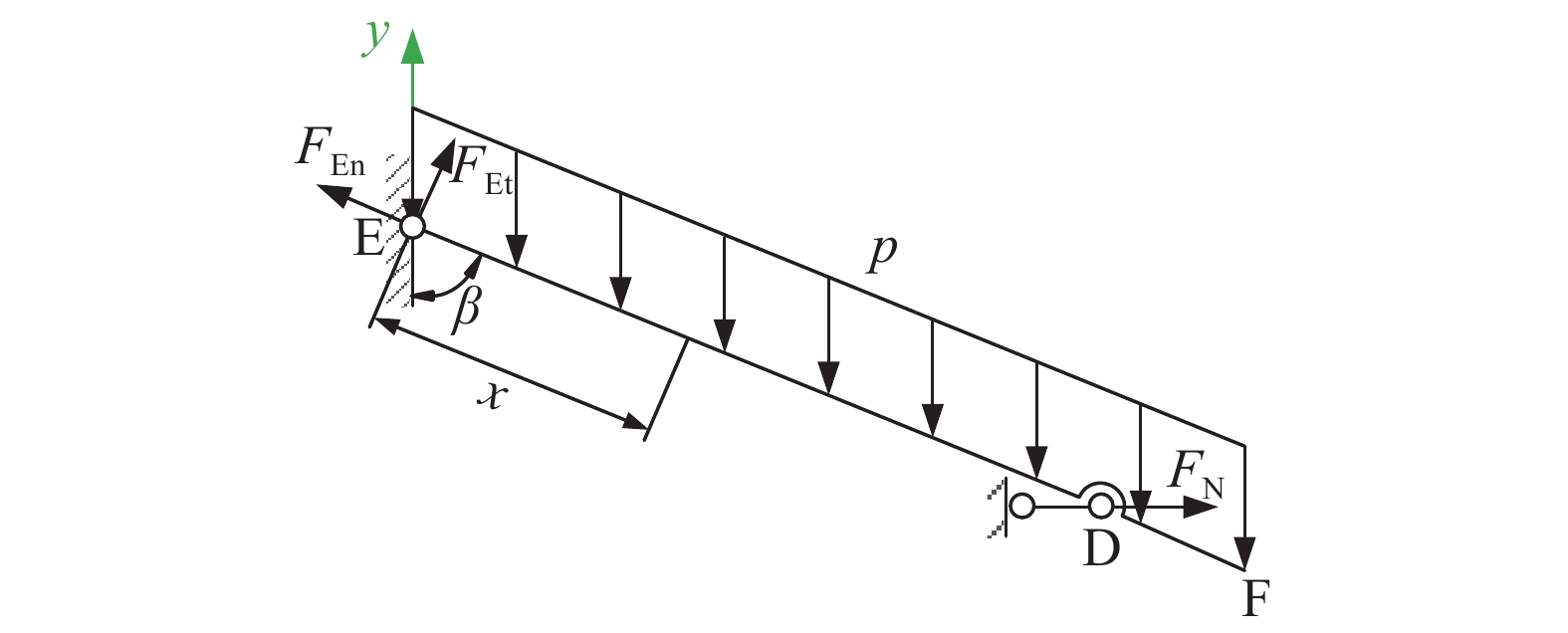
如图7所示,辐条EF可简化为一根倾斜外伸梁,均布载荷p沿Y方向作用在辐条上,D点处受到连接杆BD轴力FN,将D点简化为沿竖直方向的滑动铰链支座约束。由外伸梁挠曲线的特点与lDE、lDF的比值可得辐条的挠度极值在D、E两点之间,根据静力平衡方程可得辐条DE段的弯矩方程为:
式中,
$l_{\text{DE}}$ 为辐条DE段长度,$l_{\text{DF}}$ 为辐条DF段长度,$\beta $ 为辐条与Y轴的夹角。根据挠曲线近似微分方程,用积分法求得辐条的挠曲线方程为:
式中,
$l_{\text{EF}}$ 为辐条长度,$A_1$ 为放缩系数。式(3)采用的是简化的理论模型,实物模型因为装配、摩擦等因素导致实际挠度值与理论模型有较大误差,故添加放缩系数A1用于修正实物模型与理论模型的误差。
-
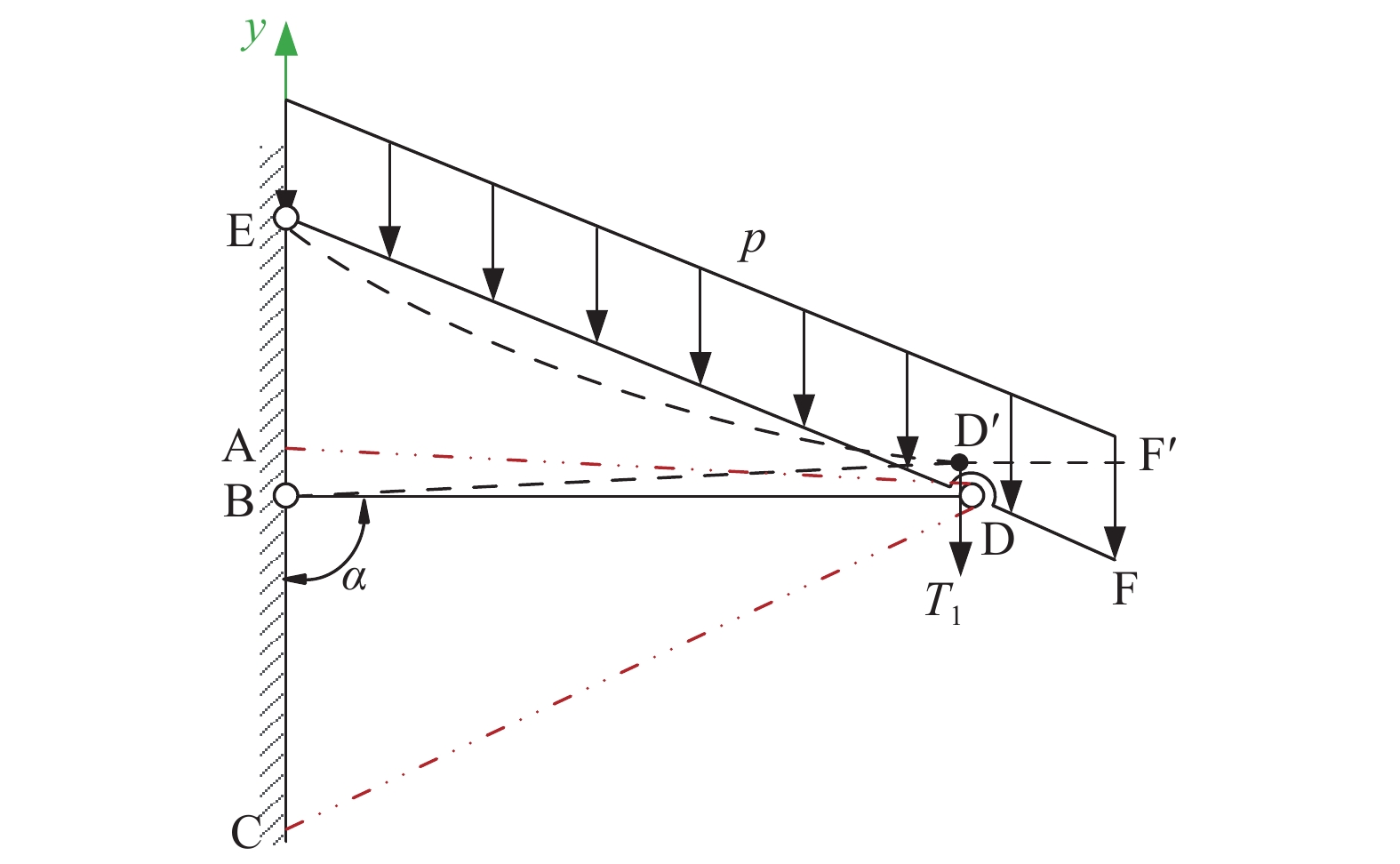
如图8所示,可展单元完全展开后,滑块B变为固定铰链支座,辐条EF、连接杆BD与机架CE构成一个稳定三角形结构,其中连接杆BD可简化为两端铰支细长压杆,临界压力Fcr为:
式中,
$E$ 为弹性模量,$I$ 为截面惯性矩,$l{\text{BD}}$ 为连接杆长度。在均布载荷p作用下,辐条发生弯曲变形,当连接杆轴力FN小于临界压力Fcr时,连接杆保持压杆稳定状态,并在辐条弯曲变形的影响下绕B点逆时针微小转动,转过的角度与辐条弯曲变形程度正相关,因此,抑制连接杆的转动能够一定程度上减小辐条的弯曲变形。
预张紧索弹力合力沿Y方向的分力T1与连接杆的运动方向相反,对连接杆的运动起阻碍作用,根据余弦定理求得预张紧柔索长度L关于夹角α的表达式:
式中,
$l_{\text{AB}}$ 为A、B间距离,$l_{\text{BC}}$ 为B、C间距离,$\alpha $ 是连接杆与Y轴的夹角。根据式(5)与胡克定律可得T1随α增大而增大,由式(3)可得辐条DE段弯曲变形的挠曲线与预张紧柔索的弹力无关,含索装置与无索装置辐条的挠曲线均可用式(3)表示。由于静力学平衡方程小变形假设的局限性,默认辐条弯曲变形过程D点位置为固定约束,因此,借助有限元软件建立无索减速装置与含索减速装置两组模型进行对比分析,验证辐条的刚度自适应性。
-
使用ANSYS Workbench软件建立有限元模型,模型参数见表1,如图9(a)所示,根据减速装置整体周向对称的结构特性简化模型,建立整体1/12的有限元模型。
首先,对模型进行简化,去掉连接环,通过Fixed Support将连接架下端、预张紧柔索下端与地面固定连接。简化主体为环形梁,保留驱动环,12组可展单元通过建立环形梁与驱动环连接为一个整体。建立环形梁、驱动环、辐条、连接杆与预张紧柔索的线体模型,创建固定机构的实体模型,并将固定机构刚度行为设为刚性,通过Cyclic Region功能生成图9(b)所示减速装置整体有限元模型,并设置抑制预张紧柔索的无索模型进行对照分析。
其次,固定机构通过Fixed Joint固定连接在连接杆上,预张紧柔索的单元类型为cable280单元,材料选用Kevlar索,通过Frictionless Contact连接在固定机构上。环形梁、驱动环、辐条与连接杆的单元类型为beam188单元,材料选用Y8911/T300碳-BMI复合材料,通过Revolute Joint进行装配,并设置环形梁、驱动环的约束类型为Fixed Support,材料参数见表2。
最后,预张紧柔索的单元尺寸为5 mm,预张紧柔索与固定机构连接区域的单元尺寸设为1 mm,环形梁、驱动环、辐条与连接杆的单元尺寸为10 mm。特别的,为促进求解器计算结果收敛,预张紧柔索与连接杆模型之间留出1.5 mm空隙,Frictionless Contact的界面处理功能设为调整接触。最终节点为12151个,生成4480个单元。
-
在辐条施加沿-Y方向3.5 MPa的线压力模拟均布载荷p,插入INITATE命令为预张紧柔索施加10 MPa的初始应力,根据cable280单元的使用说明,开启Large Deflection功能进行求解。求解结果如图10所示,可以明显看出,在预张紧柔索作用下,减速装置整体的最大变形减小了11.18%。
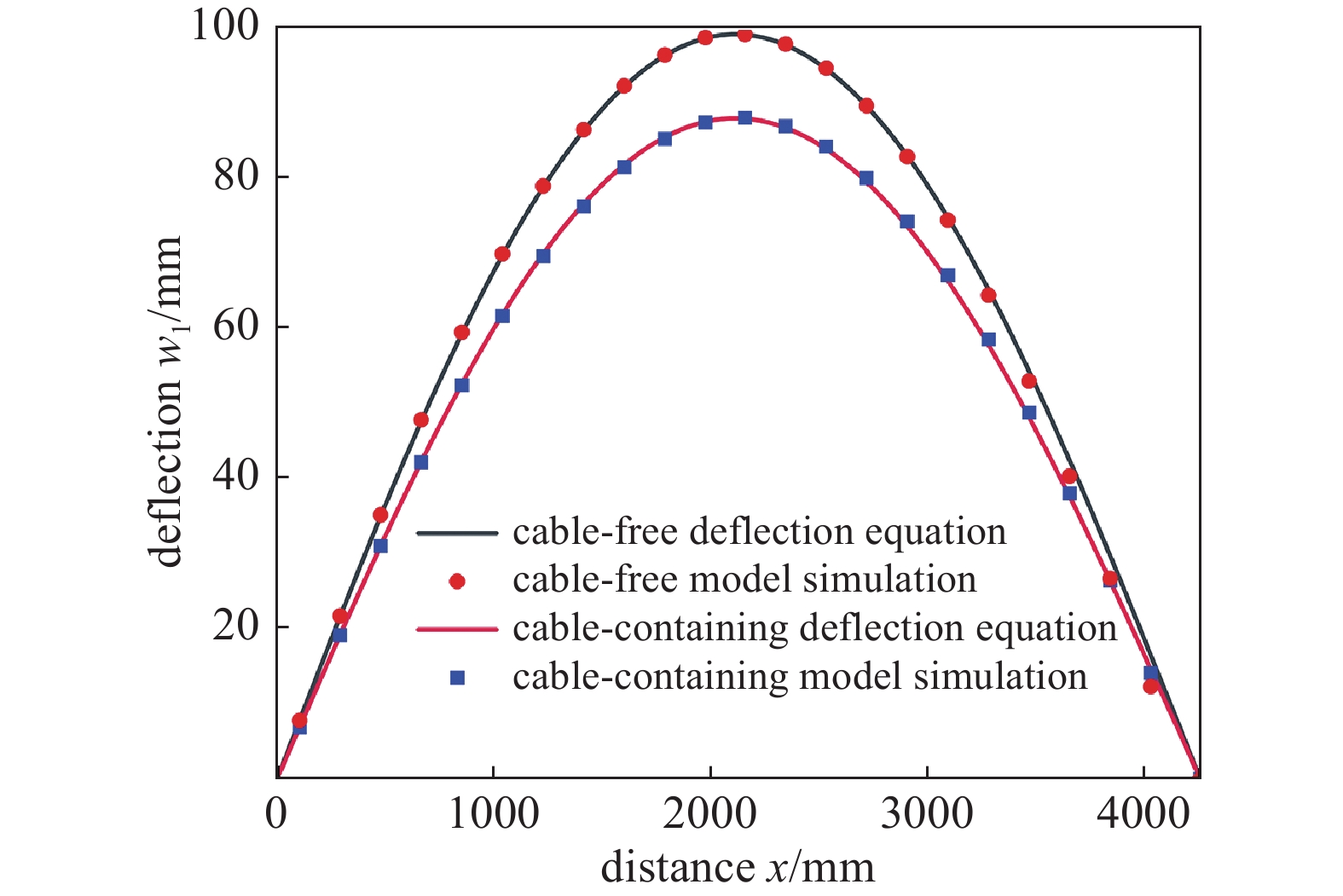
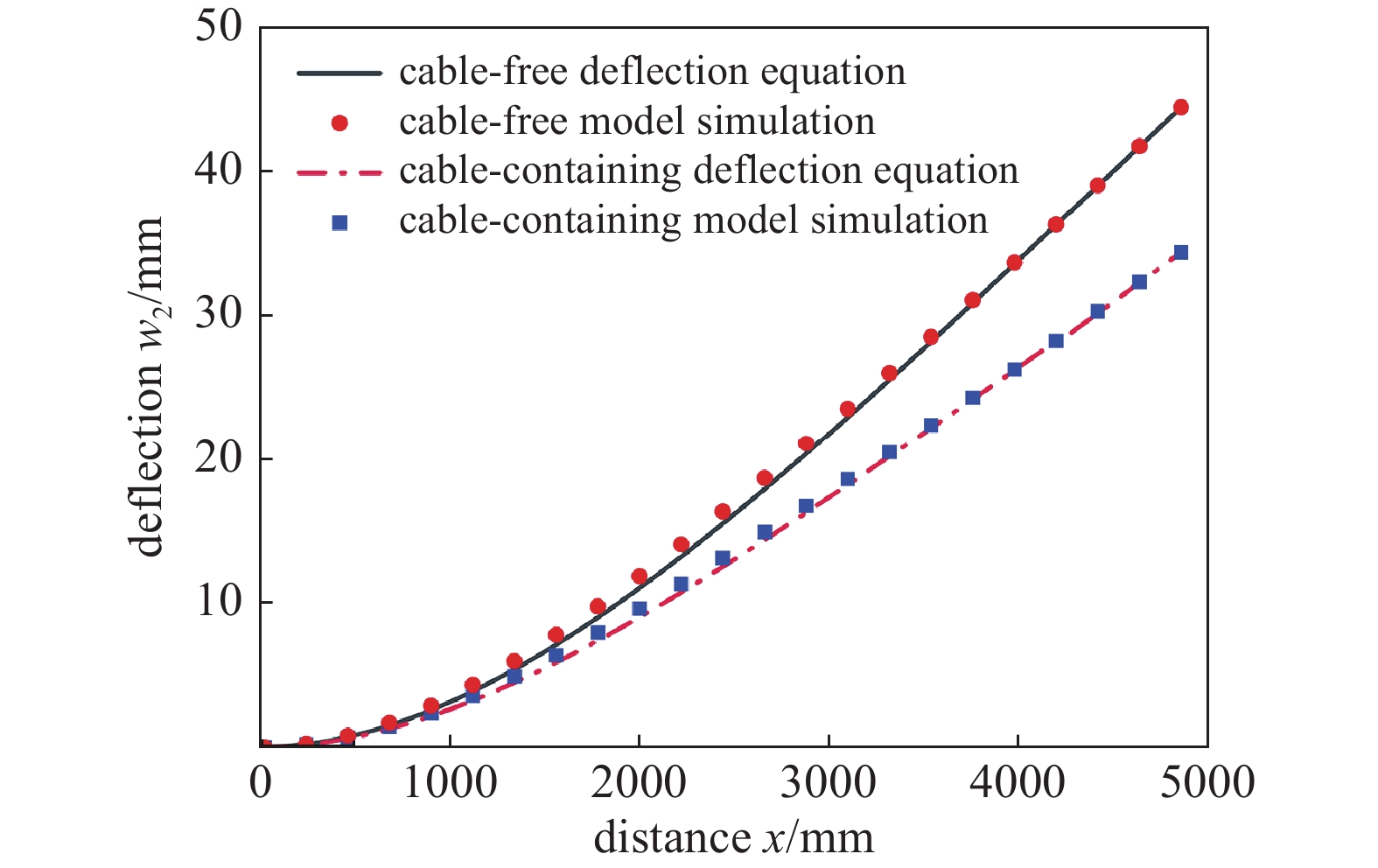
根据式(3),设A1为D点处有限元模型与理论模型挠度值的比值,用MATLAB求解得出辐条弯曲变形的理论挠曲线,将无索与含索模型中辐条弯曲变形的挠度值与理论挠曲线进行对比,如图11所示,两组模型辐条的弯曲变形均符合挠度方程的分布规律,整体重合度很高,最大误差为2.48%,证明无索与含索模型辐条的弯曲变形可用同一个挠曲线方程表示,符合式(3)的分析结论,同时挠曲线方程验证了图9所示减速装置整体有限元模型装配方式与仿真设置的正确性,并给出了辐条任意点挠度的精确解。
-
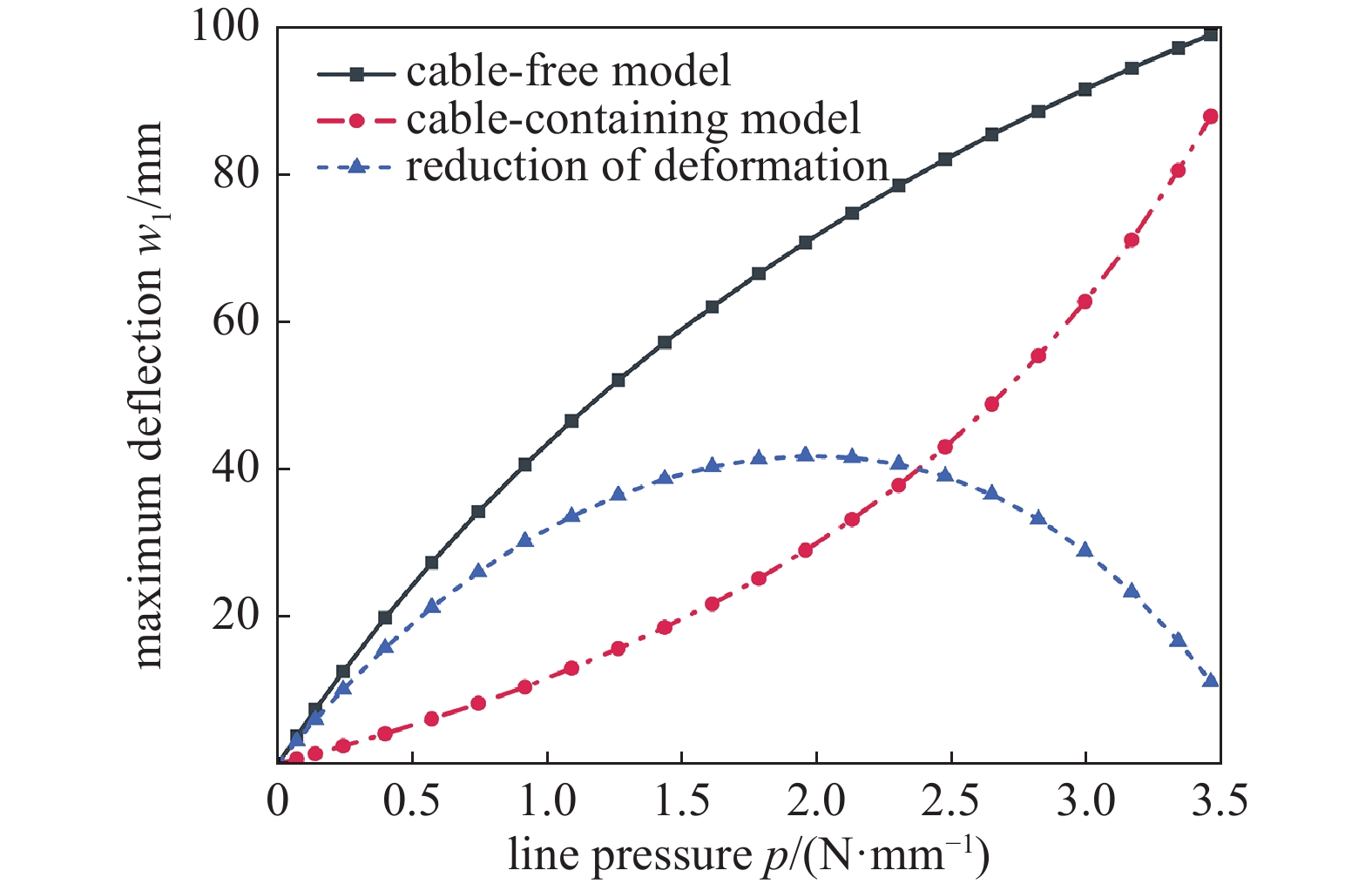
导出无索与含索模型中辐条随载荷变化的最大挠度曲线,用∆w表示两组模型辐条最大挠度的差值,如图12所示,在0~3.5 N/mm线压力范围内,含索模型的最大变形始终小于无索模型。
在0~2 N/mm范围内,辐条的最大挠度随载荷的增大缓慢增加,在2 N/mm下∆w达到59%。随着载荷的继续增大,含索模型的最大变形开始迅速增大,预张紧柔索对辐条弯曲变形的阻碍作用开始减弱,测得极限载荷下预张紧柔索截面最大应力为58.18 MPa,小于所选材料Kevlar索的抗拉强度128 MPa,能够满足实际应用要求。
-
使用图9所示有限元模型,设置预张紧柔索的截面直径为2~10 mm,其余构件保持不变,插入INITATE命令为预张紧柔索施加10 MPa的初始应力,开启Large Deflection功能求解减速装置的初始弯曲变形,然后辐条施加沿-Y方向3.5 MPa的线压力,求解减速装置在载荷下的最大弯曲变形。分析结果如图13所示,在恒定的预张紧柔索初始应力下,随着预张紧柔索直径的增大,减速装置的初始弯曲变形保持不变,最大弯曲变形随预张紧柔索直径的增大逐渐减小。
-
使用图9所示有限元模型,保持预张紧柔索直径不变,插入INITATE命令分别为预张紧柔索施加2~14 MPa的初始应力,在辐条施加沿Y方向的0~3.5 MPa的线压力,开启Large Deflection功能求解。分析结果如图14所示,保持预张紧柔索直径不变的前提下,预张紧柔索初始应力对极限载荷下的最大弯曲变形无影响;预张紧柔索的初始应力越大,辐条的刚度自适应性效果越好。
如图15所示,从刚度自适应的过程中预张紧柔索的伸长量变化曲线可得,预张紧柔索的初始应力越大,减速装置整体刚度自适应性的稳定越好,在14 MPa的初始应力下,减速装置整体在0~2.5 N/mm内保持稳定的刚度自适应性,相对2 MPa的初始应力提升了3.1倍。
-
可展单元两侧对称设置的两条相同预张紧柔索在实现减速装置轴向刚度自适应的同时,也能够赋予减速装置周向方向一定的刚度自适应性。
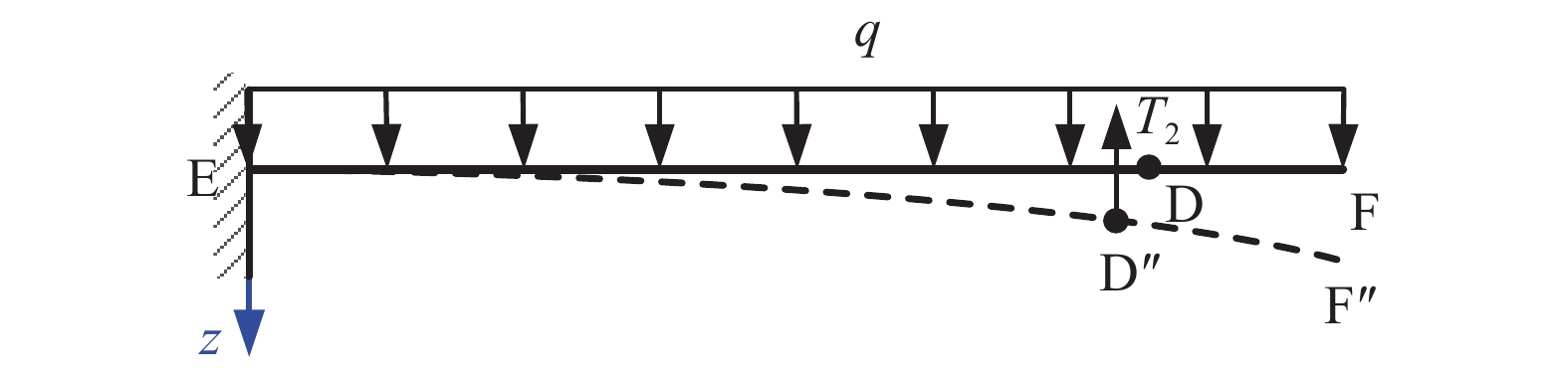
如图16所示,在图2所示Z方向均布载荷q作用下,辐条沿顺时针方向发生弯曲变形,此时辐条上侧预张紧柔索伸长率增大,下侧预张紧柔索伸长率减小,预张紧柔索弹力合力在D点处的沿辐条法向的分力T2与辐条弯曲变形方向相反,对辐条的弯曲变形起阻碍作用。
T2的大小与辐条弯曲变形程度正相关,均布载荷q越大,辐条的弯曲变形越大,预张紧索对辐条弯曲变形的阻碍作用也越强,使辐条的抗弯刚度随均布载荷q的增大而增强,实现减速装置周向方向一定的刚度自适应性。
-
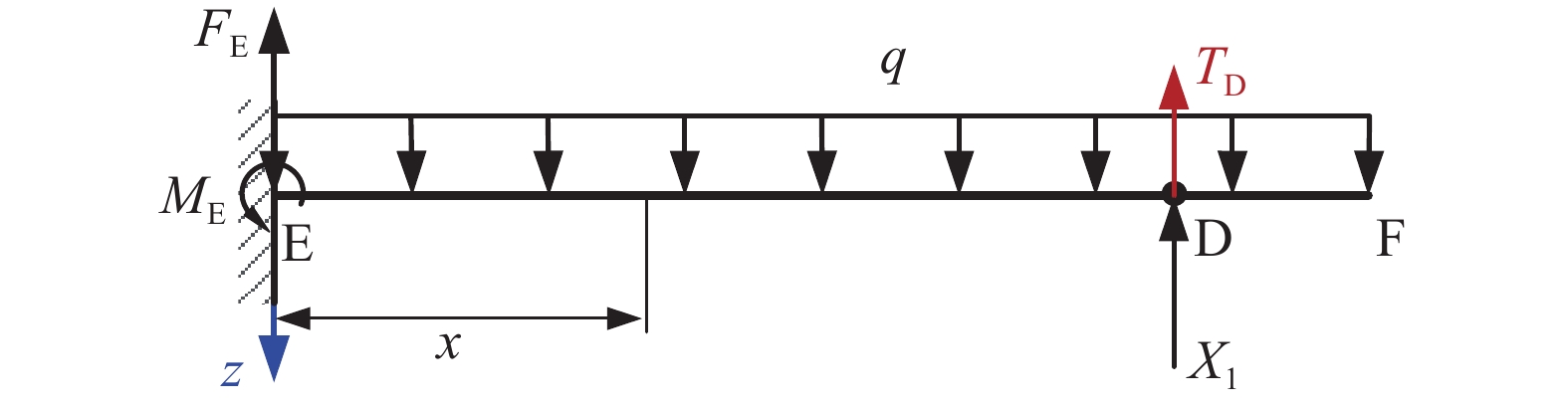
如图17所示,研究辐条在Z方向均布载荷q作用下的弯曲变形,将辐条简化为一次超静定悬臂梁,其中,X1表示D点处连接杆对辐条未知的支持力,TD表示辐条弯曲变形后两侧柔索弹力在D点沿Z方向分力的合力,TD为0时表示无索状态。
根据力法方程,用图乘法求得未知支持力X1为:
式中,
$\Delta _{1\text{p}}$ 为均布载荷$ q $ 单独作用时D点沿Z方向的位移,$\delta _{11}$ 为未知支持力$X_1$ 单独作用且值为1N时D点沿Z方向的位移。根据叠加原理求得辐条的弯矩方程为:
根据挠曲线近似微分方程,用积分法求得辐条沿Z方向弯曲变形的挠曲线方程,并分别添加放缩系数A2、A3,用以弥补运动副与仿真设置的误差,如式(8)所示:
式中,
$A_2$ 、$A_3$ 为放缩系数,用于修正实物模型与理论模型的误差。 -
对辐条施加沿Z方向0.1 N/mm的线压力表示均布载荷q,插入INITATE命令为预张紧柔索施加10 MPa的初始应力,开启Large Deflection功能求解,求解结果如图18所示,在预张紧柔索作用下,减速装置整体的最大变形减小了25%。
根据式(8),设A2、A3为辐条E点与F点有限元模型与理论模型挠度值的比值,用MATLAB求解得出辐条弯曲变形的理论挠曲线,将无索与含索模型中辐条弯曲变形的挠度值与理论挠曲线进行对比,如图19所示,仿真结果与理论计算的最大误差为3.11%,通过挠曲线方程验证了有限元模型的准确性,并得到辐条各点挠度的精确解。
导出无索与含索模型中辐条随载荷变化的最大挠度曲线,如图20所示,含索模型在0~0.08 N/mm线压力范围表现非常稳定的刚度自适应性,辐条的最大挠度一直保持在较低水平,
${\Delta }{w}$ 在0.08 N/mm线压力下高达75.1%。但在0.09~0.1 N/mm线压力范围内,含索模型辐条的抗弯刚度迅速减小,测得极限载荷下一侧预张紧柔索截面最大应力为1.79 MPa,另一侧预张紧柔索截面最大应力为17.36 MPa,远小于所选材料Kevlar索的抗拉强度128 MPa,满足实际应用要求。 -
在减速装置展开过程中,驱动环作为共用滑块推动12组可展单元同步展开,如图21所示,在一个可展单元中,滑块B在驱动力F1作用下沿 x方向做直线运动,EF杆绕E点定轴转动,BD杆做平面运动,质心O绕瞬心P定轴转动转动,B1、B2间距离为1192 mm,为滑块的极限运动距离,在展开过程中,β从15°增大至70°。
由图9有限元模型可得可展单元完全展开后预张紧索的长度为8370.3 mm,根据式(9)可得预张紧索在不同初始应力下的初始伸长量,当预张紧柔索的初始应力为10 MPa时,计算可得张紧预张紧柔索初次拉伸的伸长率为0.008%,初始拉伸量为0.7 mm,柔索张紧过程中滑块的位移为26 mm,占极限运动距离的2.18%,整个展开过程主要为滑块、辐条与连接杆的平面运动。
式中,
$ \sigma $ 为预张紧柔索截面初始应力,$ \Delta L $ 为预张紧柔索伸长量。如图21所示建立笛卡尔坐标系,减速装置在进入火星大气前展开,不需要考虑重力的影响,根据第二类拉格朗日方程,建立辐条、连接杆与滑块的运动微分方程:
式中,
$ y_{\text{B}} $ 为滑块B质心位置,$l_{{{\text{B}}_{\text{1}}}{\text{E}}}$ 为B1、E点距离,$l_{{\text{DP}} }$ 为D、P点距离,$ \dot{y}_{\text{B}} $ 为滑块B质心速度,$ {J_{\text{E}}} $ 为EF杆对于E点的转动惯量,$ {J_{\text{P}}} $ 为BD杆对于瞬心P的转动惯量,$\dot \beta $ 为辐条角速度。 -
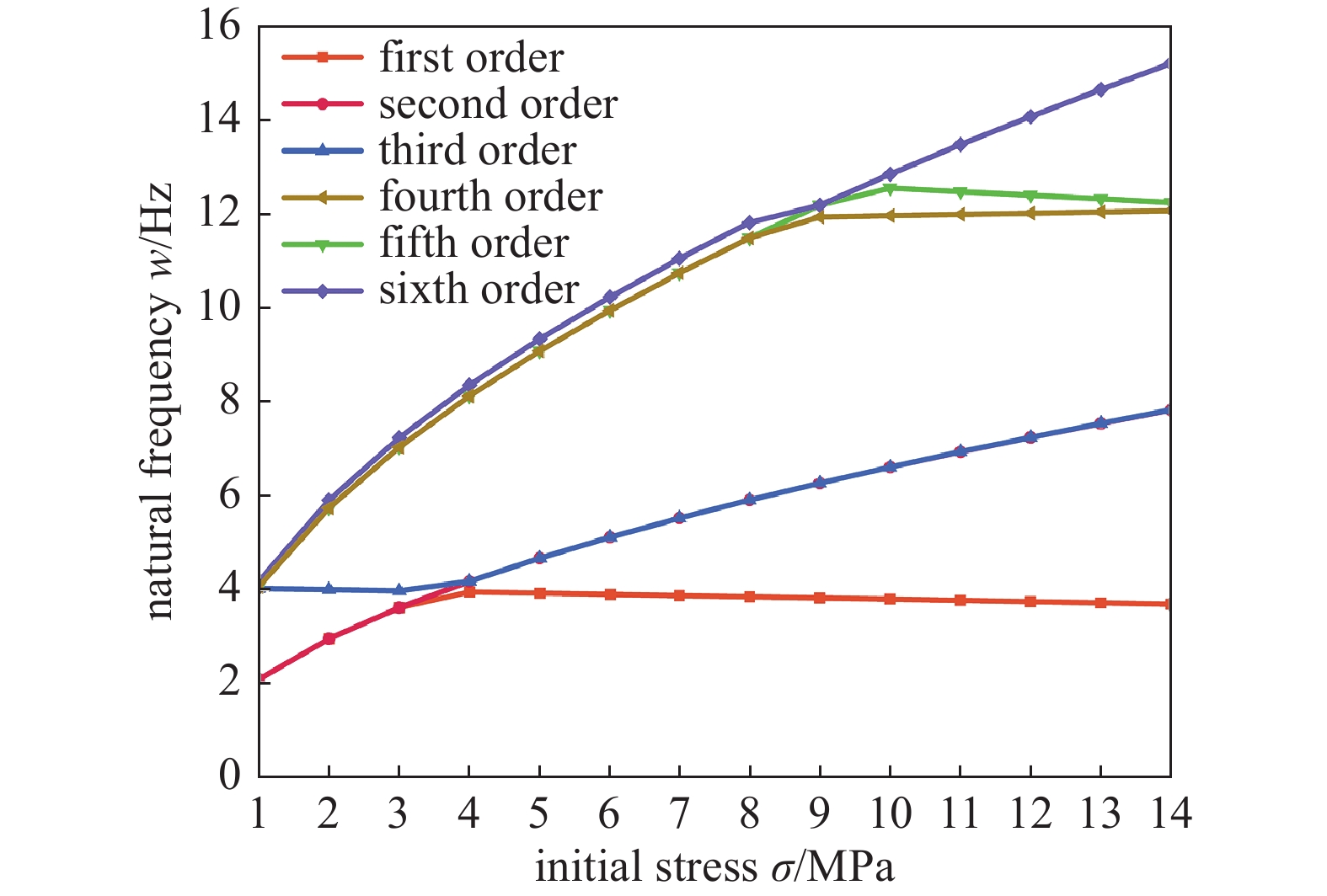
使用图9所示减速装置整体有限元模型,柔索直径保持不变,插入INITATE命令为预张紧柔索施加1~14 MPa的初始应力,开启Large Deflection功能,对减速装置进行模态分析,分析预张紧柔索的初始应力对减速装置整体固有频率的影响。分析结果如图22所示,减速装置的前六阶固有频率随预张紧柔索初始应力的增大出现不同程度的增长,在10 MPa附近增速减缓,结合静力学仿真结果可得到最佳刚度自适应性区间内基频较好的初始应力。
-
根据式(10)可得驱动力与可展单元展开速度的对应关系,为验证可展单元运动微分方程的正确性,根据图5(a)所示折叠状态下的减速装置,使用ADAMS搭建虚拟样机模型进行动力学仿真分析,如图23所示。
根据表1、表2参数计算得辐条的质量为18.21 kg,连接杆的质量为15 kg,为简化计算,设置滑块B的质量为1 kg。如图23所示,在驱动环与4根钢丝绳的连接处分别施加120 N的恒定力,驱动环共受到480 N的驱动力。
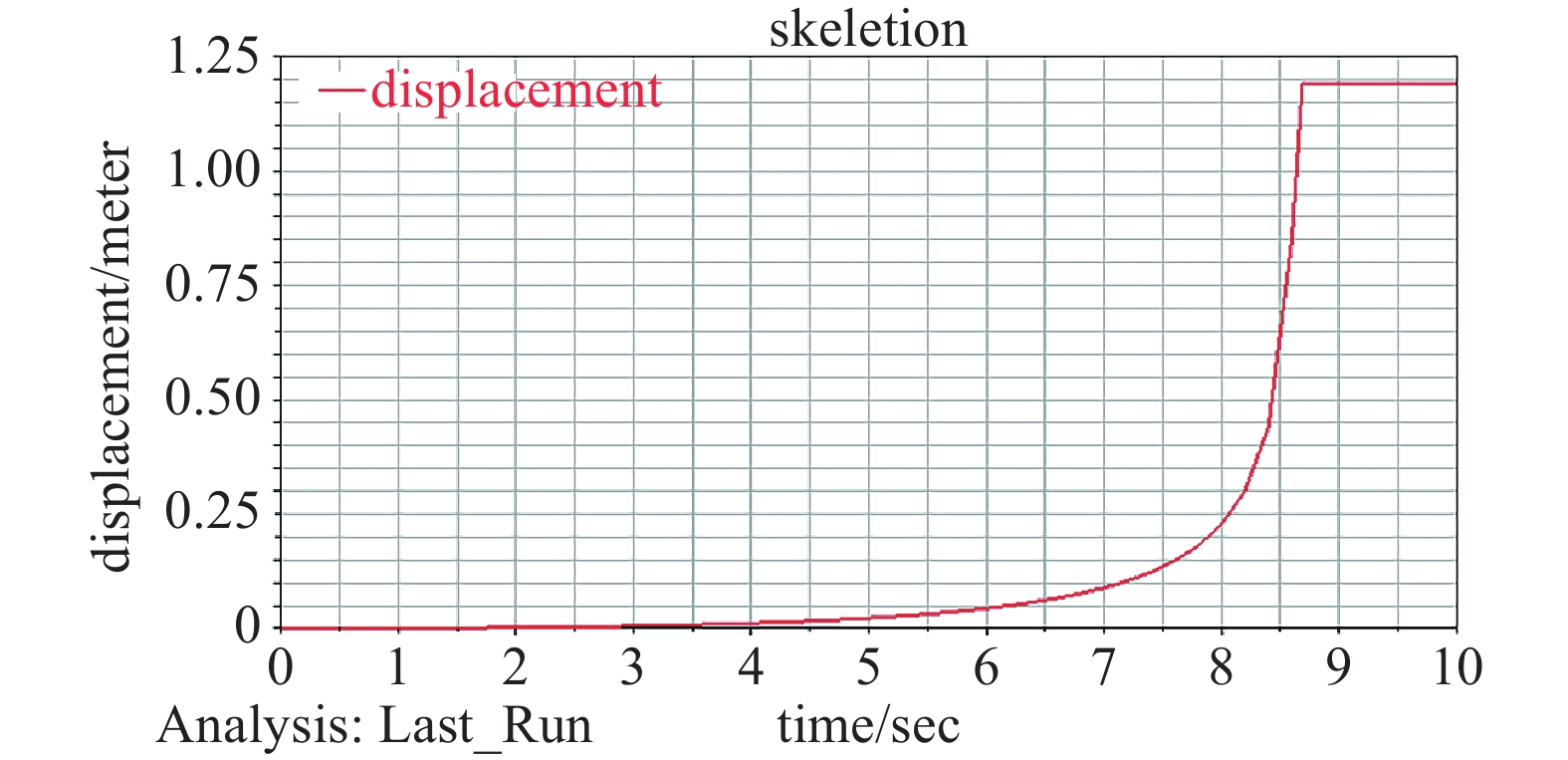
在驱动环与4组锁定机构之间添加接触力,使驱动环与锁定机构表面接触后停止运动,仿真结果如图24所示,在展开过程中,驱动环做匀加速直线运动,在8.4 s时运动到最终位置并停止运动。
导出展开过程辐条角速度变化曲线,用MATLAB计算得到式(10)在[0,8.4]区间内的变化曲线,如图25所示,仿真曲线与运动微分方程的重合度较高,最大误差为3.48%,展开过程中辐条做变加速定轴转动,在完全展开后迅速停止。仿真结果验证了运动微分方程的正确性,表明驱动力与展开时间之间的关系,为实物样机设计提供参考。
-
(1)设计出一种具有刚度自适应性的可展开伞状减速装置,辐条的抗弯刚度随外界空气载荷的增大而增大;根据减速装置的实际工作要求,设计由电动机、钢丝绳与定滑轮构成的轻量化的单向驱动机构,采用驱动环作为共用滑块保证多组辐条的同步展开。
(2)将辐条建模为在均匀空气动力施加的载荷下弯曲的单独欧拉伯努利梁,分析了减速装置的刚度自适应原理。由于挠曲线方程的局限性,利用有限元软件验证减速装置的刚度自适应性,分析结果表明,预张紧柔索的加入使得辐条的抗弯刚度随外界载荷的增大而增强,且预张紧柔索的直径越大,辐条的抗弯刚度越强;预张紧柔索的初始应力越大,辐条的抗弯刚度越稳定。同时,可展单元两侧双柔索的设计赋予辐条沿主体周向非常稳定的刚度自适应性。
(3)基于第二类拉格朗日方程推导运动微分方程分析减速装置展开过程。对减速装置整体有限元模型进行模态分析,得到最佳刚度自适应性区间内基频较好的初始应力。创建虚拟样机模型进行动力学仿真验证运动微分方程的正确性,得到驱动力与减速装置整体展开速度之间的对应关系,为实际减速装置样机驱动电机的选择提供参考。
半刚性自适应可展开伞状减速装置设计与分析
Design and Analysis of Semi-Rigid Adaptive Deployable Umbrella-Shaped Decelerator
-
摘要: 针对可展开式减速器的辐条在复杂气动载荷下易发生弯曲变形的问题,提出一种具有刚度自适应性可展开伞状减速装置,通过合理布置预张紧柔索使辐条的抗弯刚度随外界气动载荷的增大而增强。首先,基于载荷方程建立减速装置支撑结构的理论模型,分析刚度自适应性的作用原理,其次,利用有限元分析软件创建无索与含索减速装置的对照模型,验证含索减速装置的刚度自适应性。最后,建立运动微分方程与虚拟样机模型,分析减速装置展开过程。分析结果表明,在直径10 mm,初始应力10 MPa的预张紧柔索作用下,辐条最大挠度随载荷的变化曲线变为单调递增的平滑凹曲线,曲率随预张紧柔索初始应力的增大逐渐减小;含索减速装置整体的最大变形在0~60%极限载荷区间低速稳定增长,最大挠度减小超过50%,展现出较理想的刚度自适应性。Abstract: Aiming at the problem that the ribs of the expandable decelerator are prone to bending and deformation under complex aerodynamic load, a deployable umbrella-shaped decelerator with stiffness adaptability is proposed, and the bending stiffness of the ribs is enhanced with the increase of external aerodynamic load by reasonably arranging the pretensioned flexible cable. Firstly, based on the load equation, the theoretical model of the support structure of the decelerator is established, and the principle of stiffness adaptability is analyzed. Secondly, the finite element analysis software is used to create a control model of cable-free and cable-containing decelerators to verify the stiffness adaptability of the cable-containing decelerator. Finally, the differential equation of motion and virtual prototype model is established to analyze the unfolding process of the decelerator. The analysis results show that under the action of the pretensioned flexible cable with a diameter of 10mm and an initial stress of 10MPa, the maximum deflection of the rib changes with the load curve into a monotonically increasing smooth concave curve, and the curvature gradually decreases with the increase of the initial stress of the pretensioned flexible cable. The maximum deformation of the whole cable-containing decelerator increases steadily at low speed in the 0~60% ultimate load range, and the maximum deflection decreases by more than 50%, showing relatively ideal stiffness adaptability.
-
Key words:
- Umbrella decelerator /
- Pre-tensioning cable /
- Stiffness self-adaptation /
- Static analysis /
- Dynamic analysis .
-

-
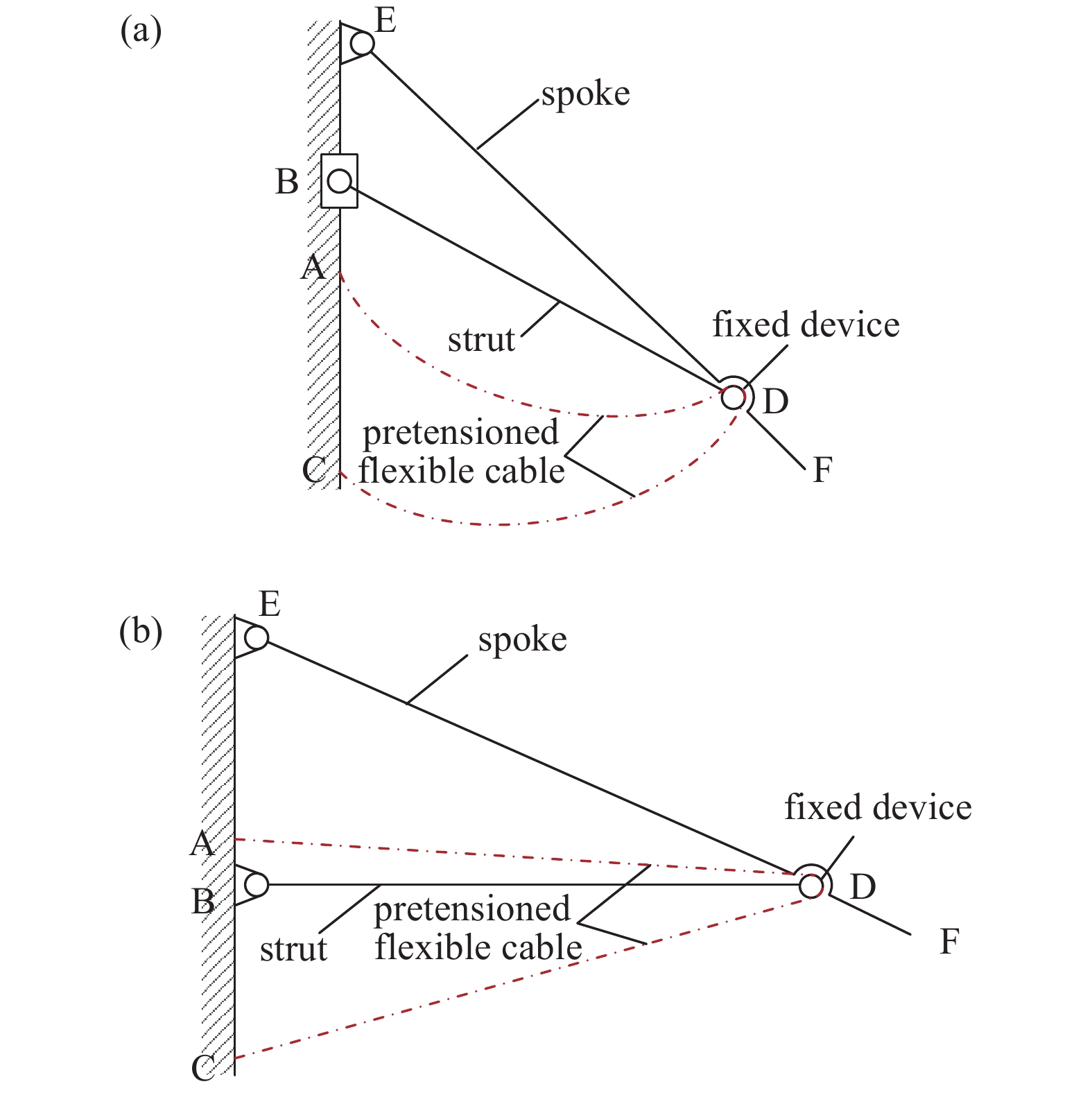
图 1 可展单元设计,(a)半展开状态,(b)全展开状态
Figure 1. The design of flexible deployable unit (a) semi expanded state (b) fully expanded state
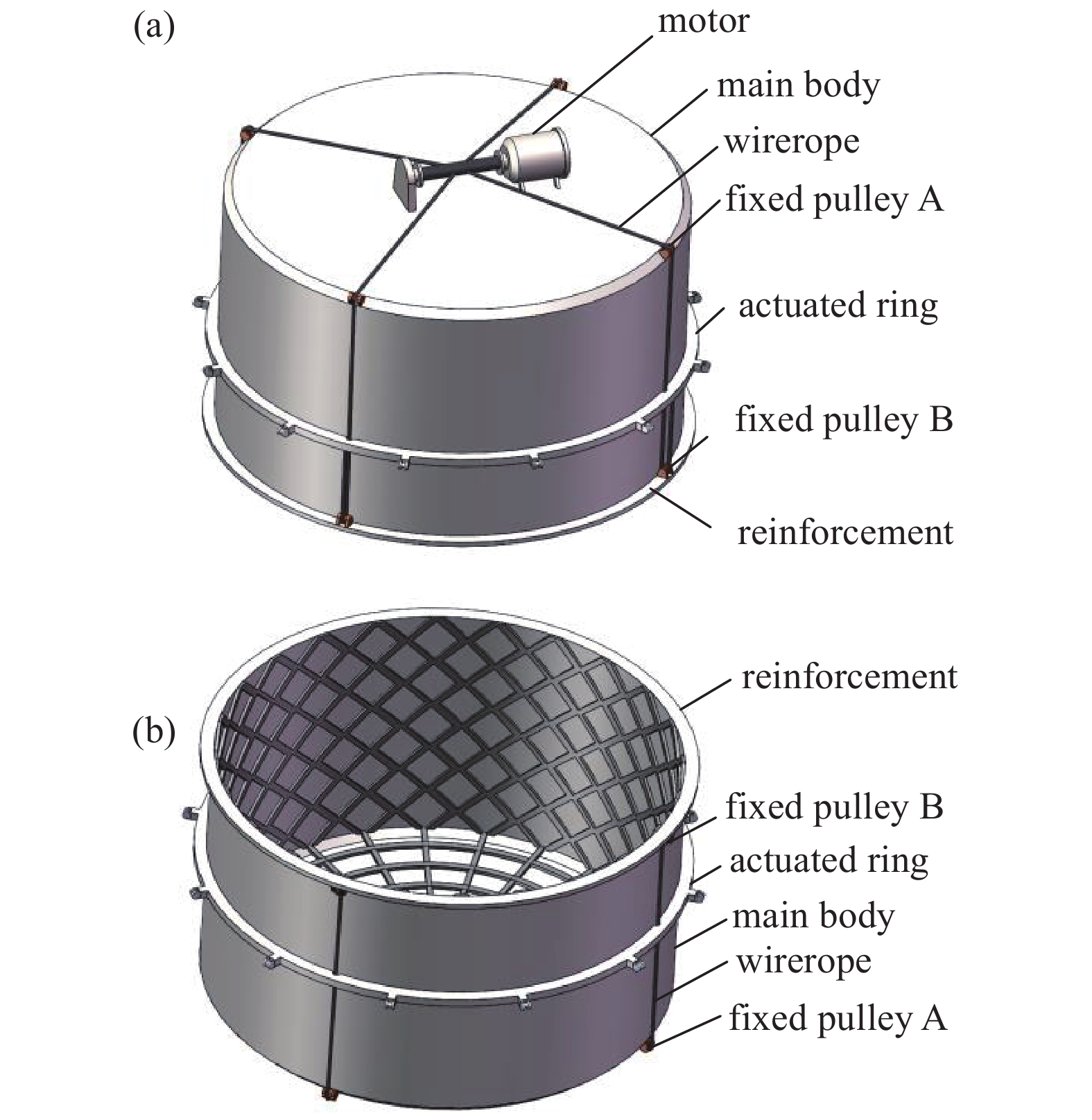
图 4 单向驱动机构三维模型。(a)单向驱动机构外侧,(b)单向驱动机构内侧
Figure 4. Three-dimensional model of unidirectional driving unit. (a) Outside of unidirectional driving unit, (b) inside of unidirectional driving unit
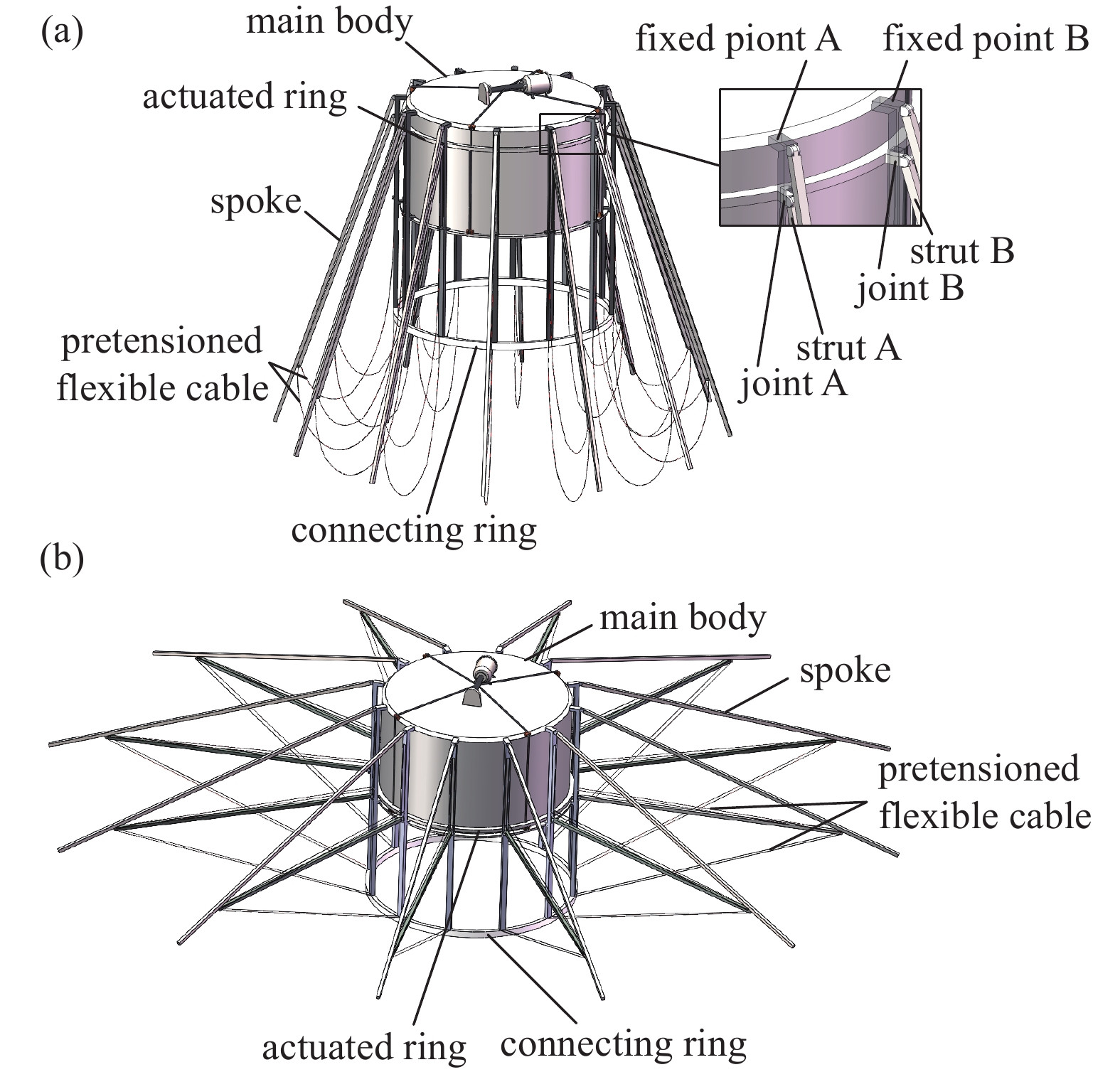
图 5 伞状可展开减速装置展开过程。(a)折叠状态,(b)展开状态
Figure 5. The expansion process of umbrella-shaped deployable decelerator. (a) Folding state, (b) expanding state
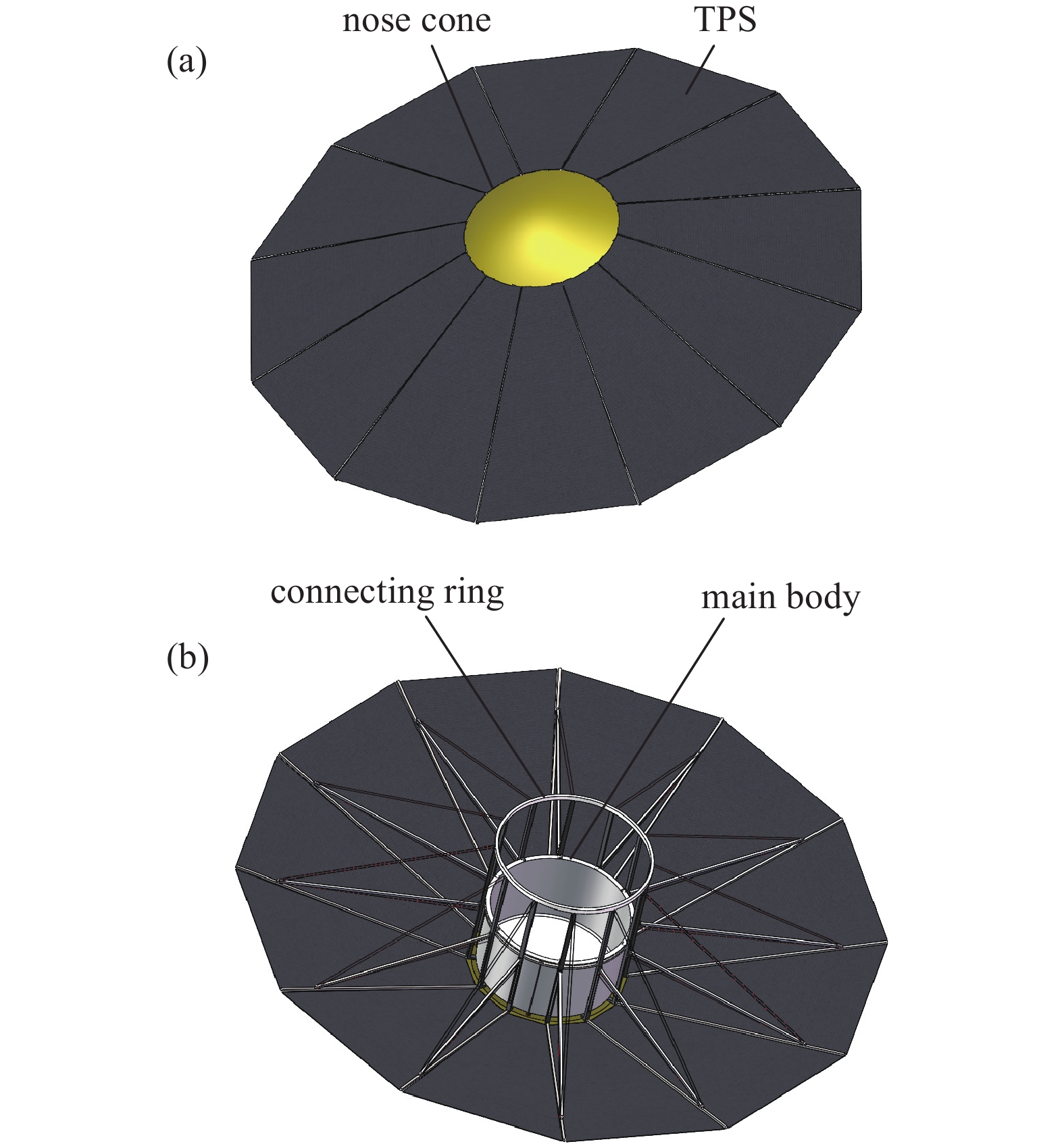
图 6 半刚性自适应可展开伞状减速装置。(a)减速装置迎风面,(b)减速装置背风面
Figure 6. Semi-rigid adaptive deployable umbrella-shaped decelerator. (a) Windward side of decelerator, (b) leeward side of decelerator
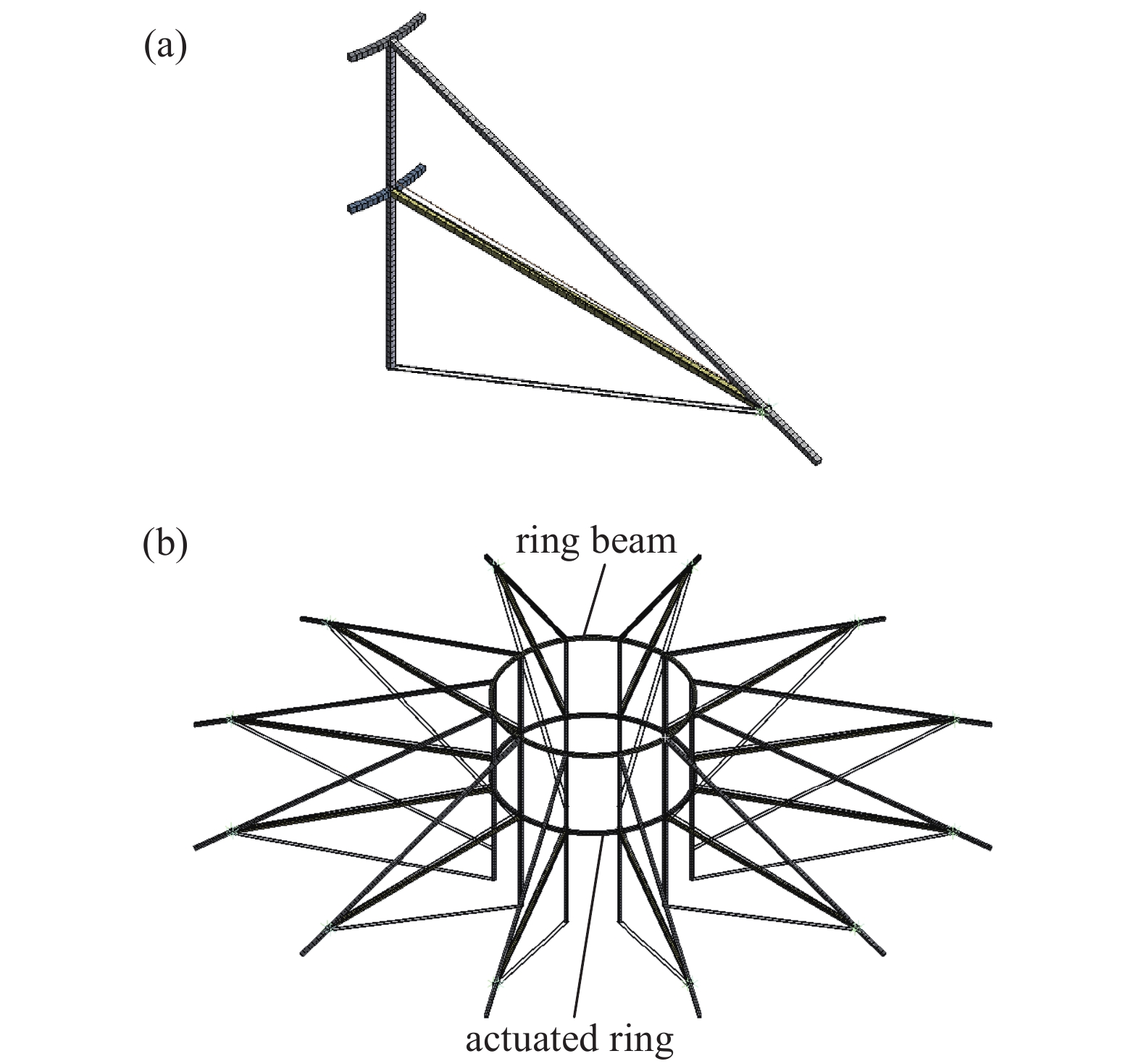
图 9 有限元模型。(a)1/12有限元模型,(b)整体有限元模型
Figure 9. Finite element model. (a) 1/12 finite element model, (b) overall finite element model
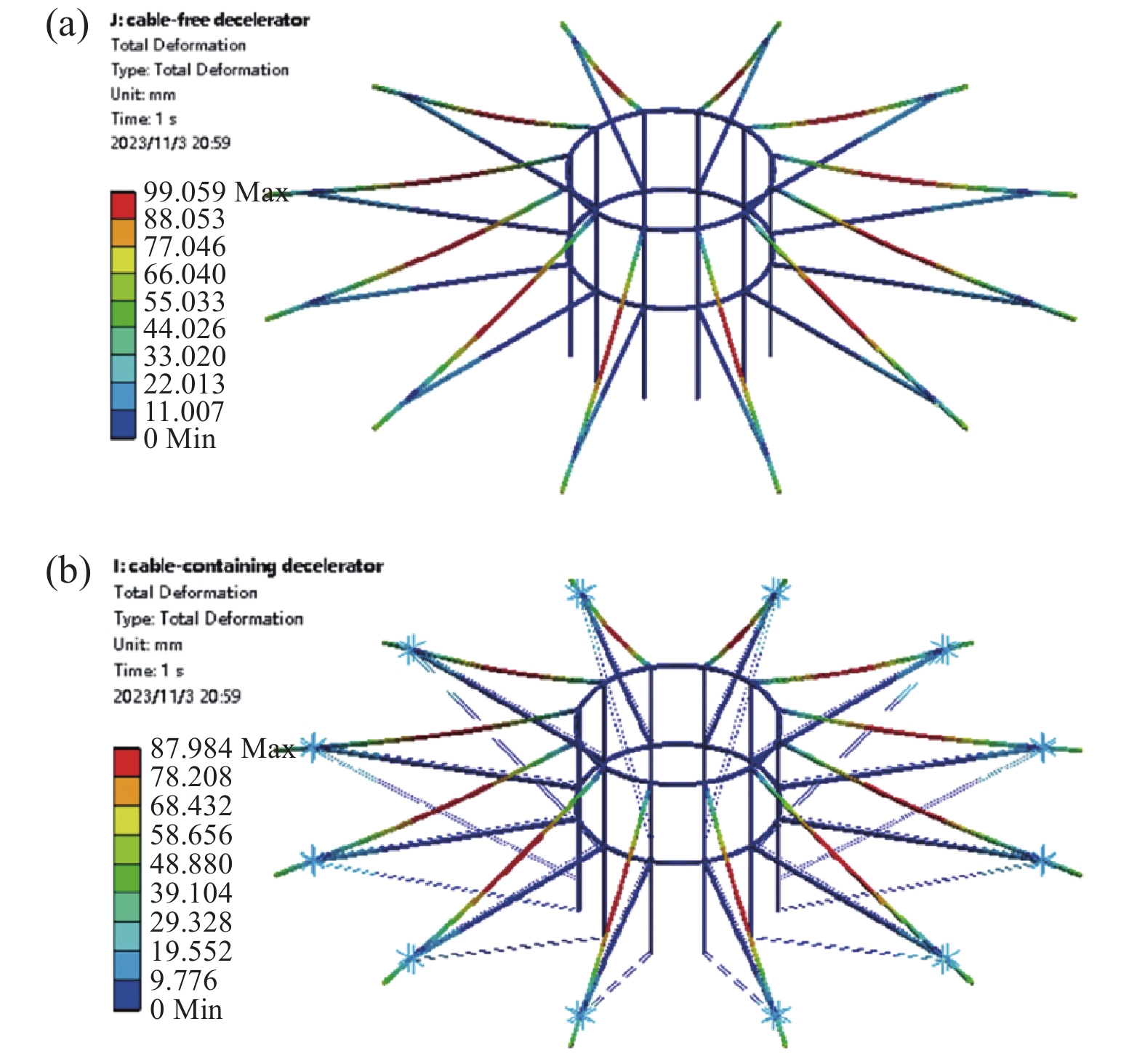
图 10 有限元仿真结果。(a)无索模型最大变形,(b)含索模型最大变形
Figure 10. Finite element simulation results. (a) Maximum deformation of cable-free model, (b) maximum deformation of cable-containing model
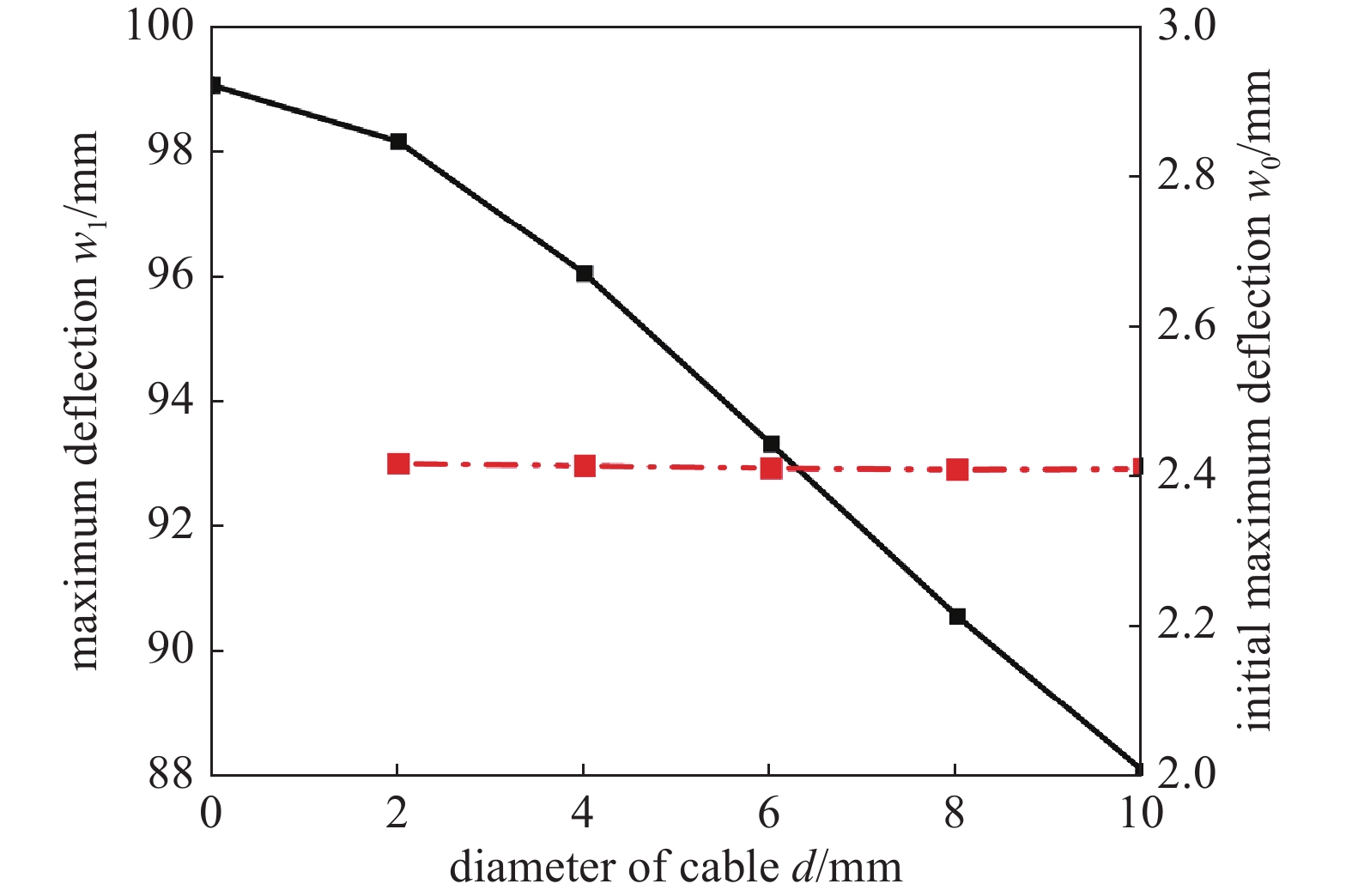
图 13 不同预张紧柔索直径最大弯曲变形
Figure 13. Maximum bending deformation of different cable diameters
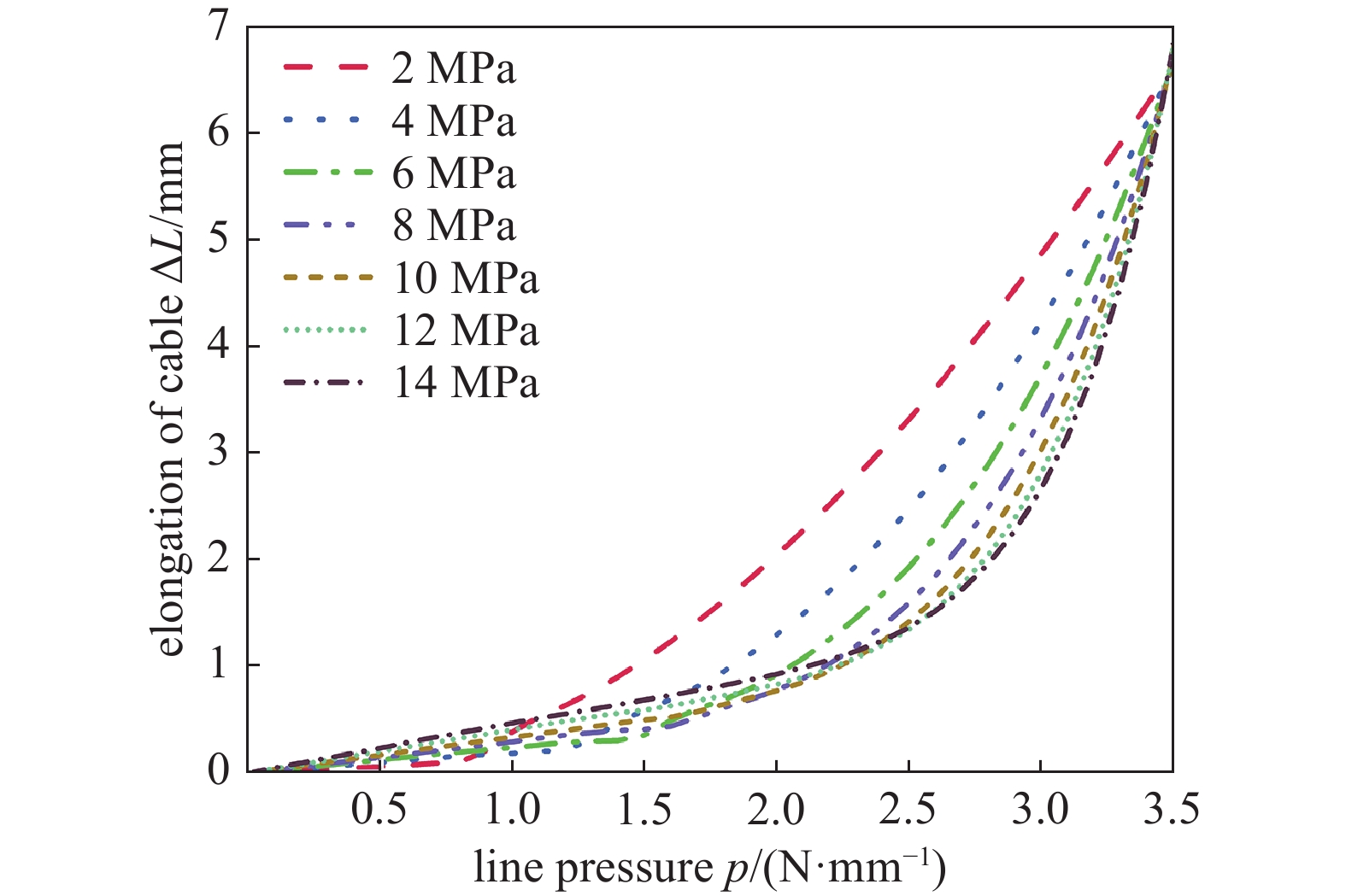
图 14 不同初始应力最大弯曲变形
Figure 14. The maximum bending deformation of different initial stress
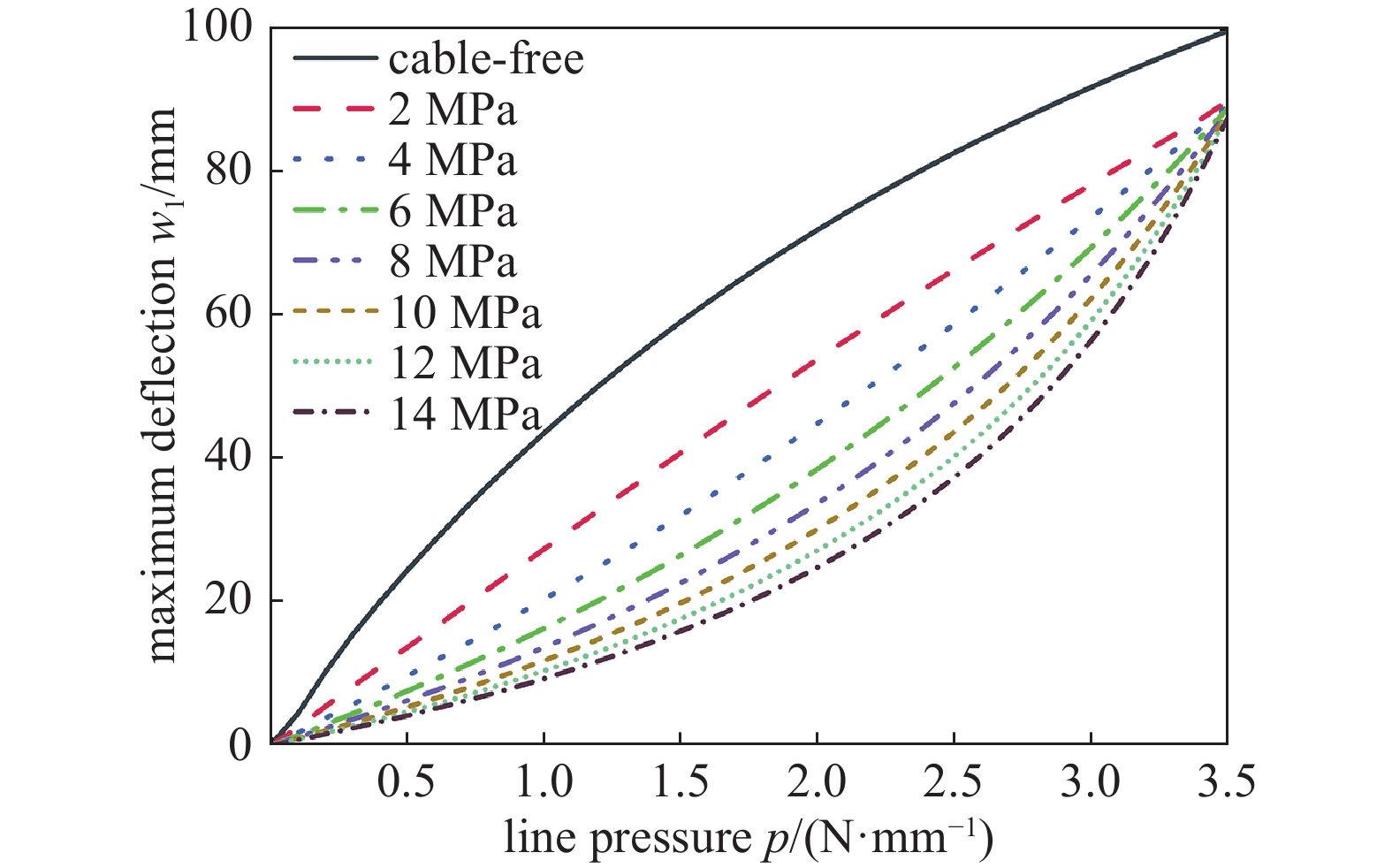
图 15 不同初始应力预张紧柔索伸长量
Figure 15. Elongation of flexible cables with different initial stresses
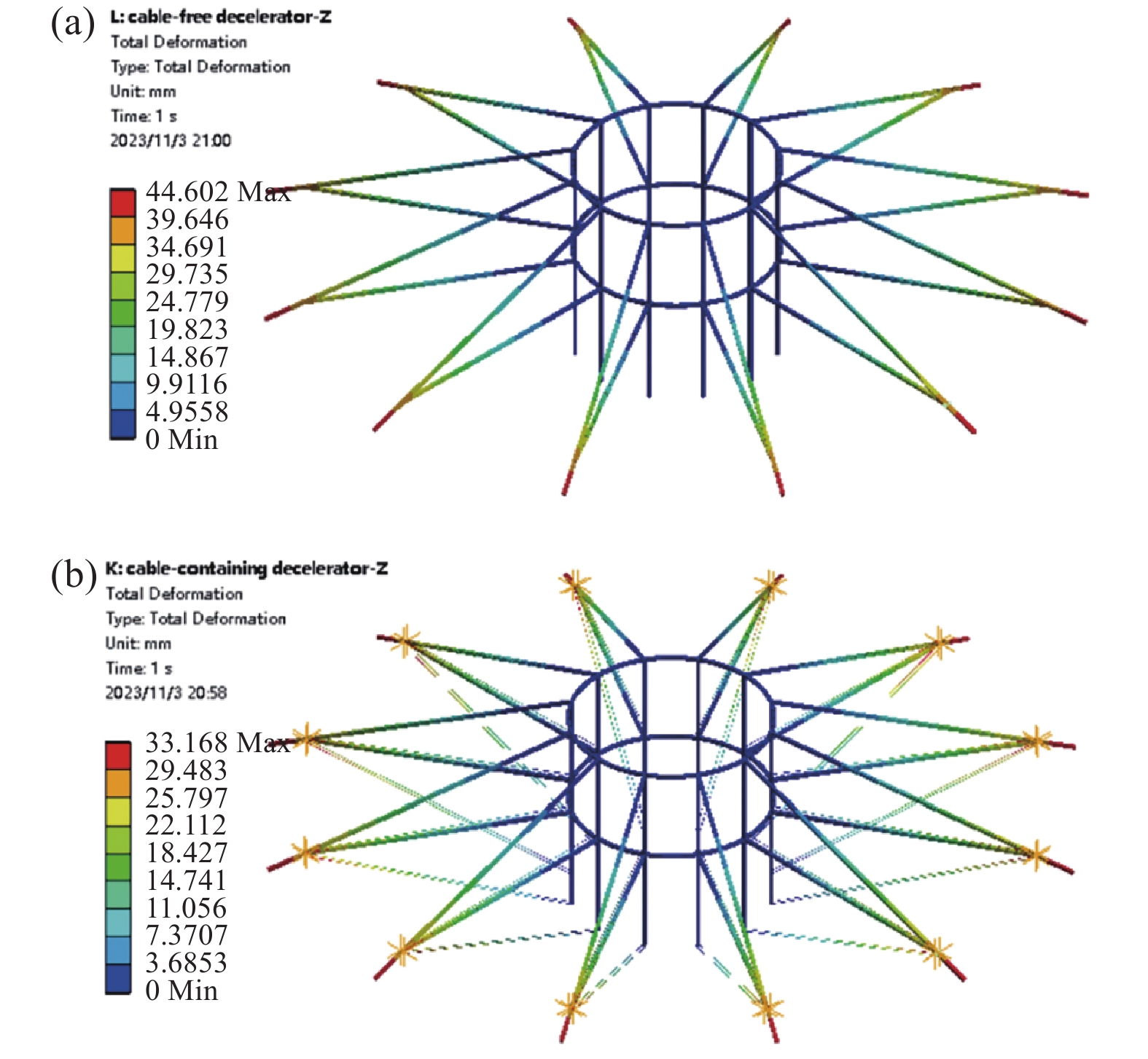
图 18 Z方向载荷仿真结果。(a)无索模型最大变形,(b) 含索模型最大变形
Figure 18. Z direction load simulation results. (a) Maximum deformation of cable-free model, (b) maximum deformation of cable-containing model
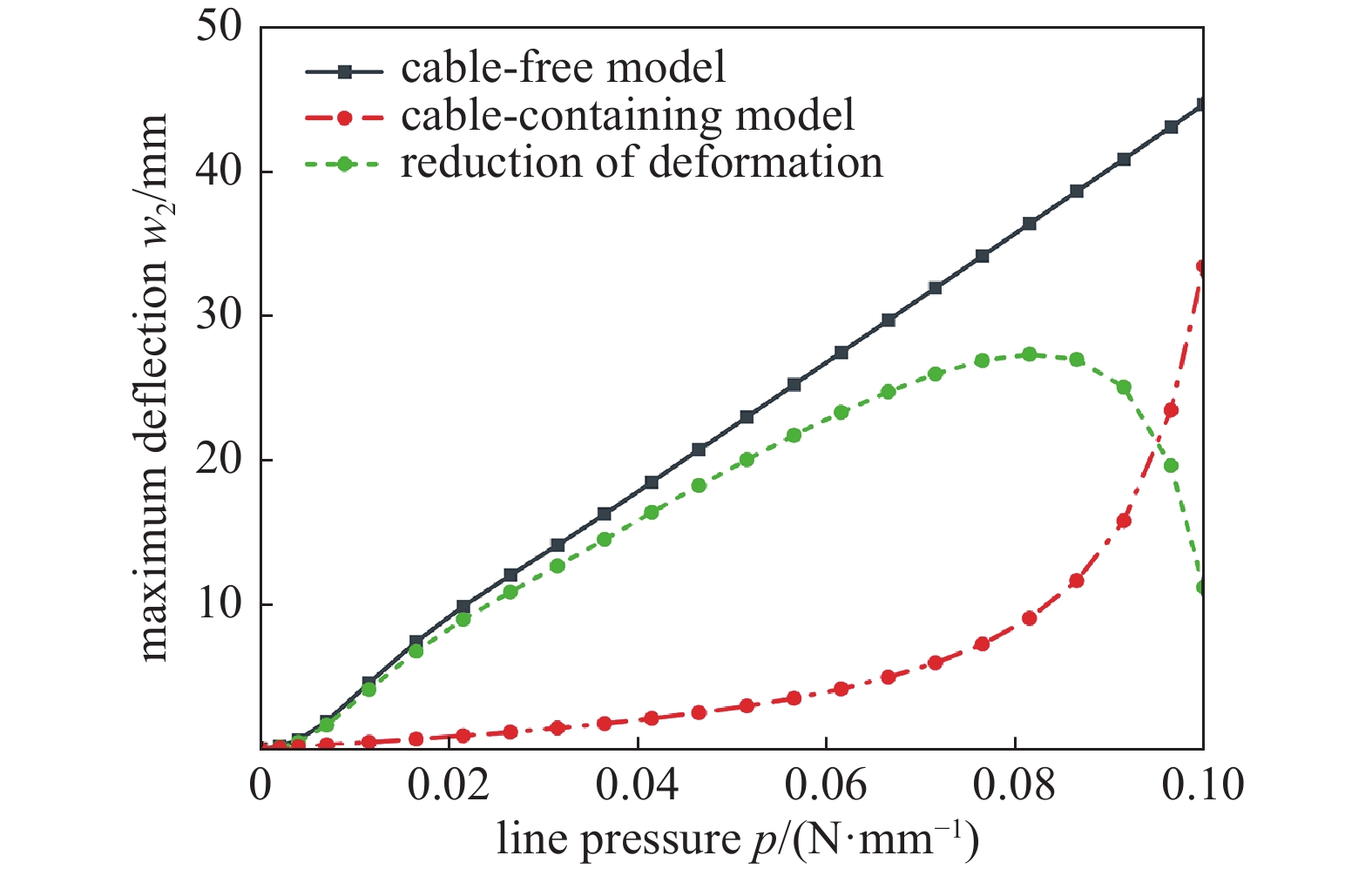
图 20 辐条Z方向最大弯曲变形变化曲线
Figure 20. Variation curve of maximum bending deformation in rib in Z direction
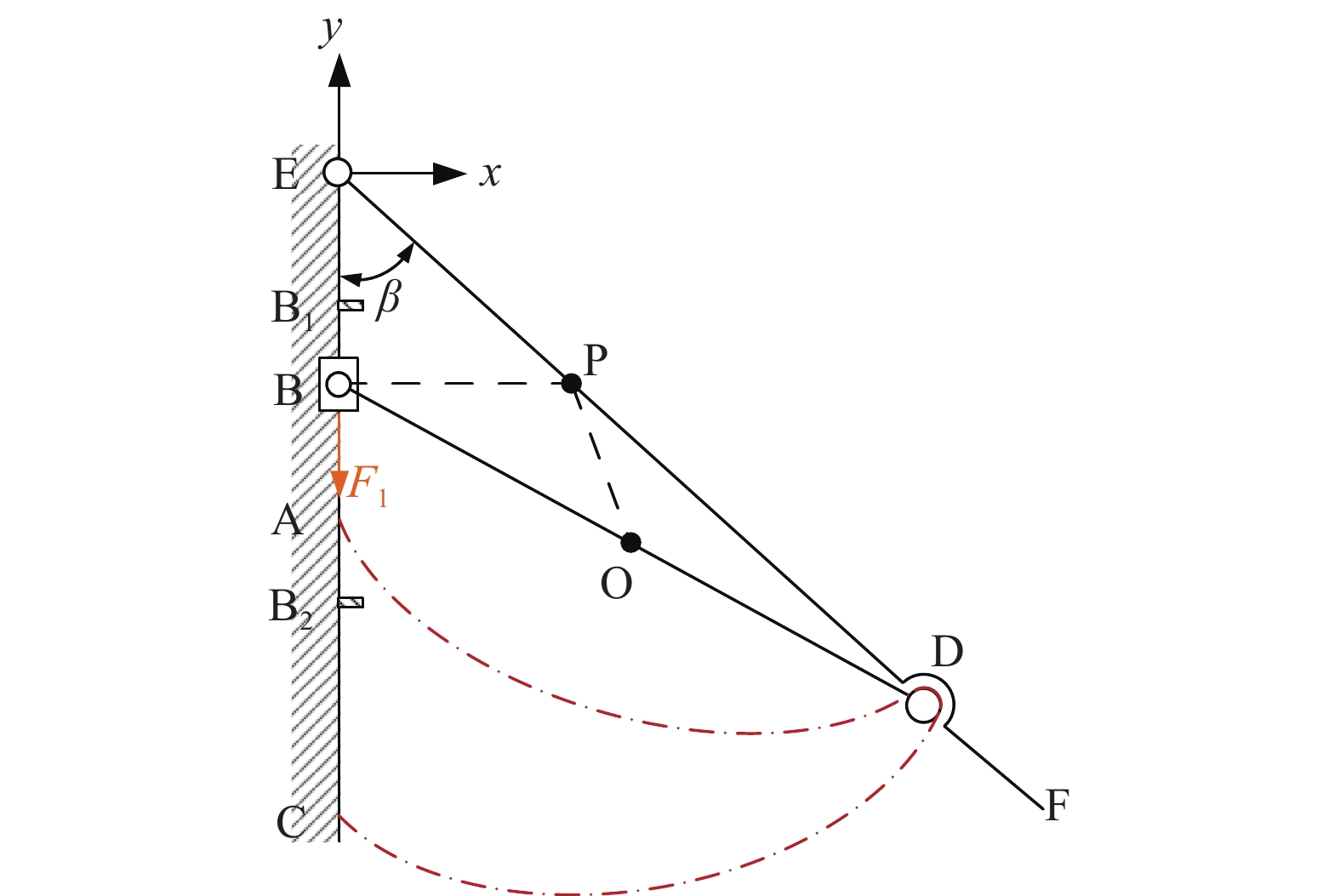
图 21 可展单元运动分析简图
Figure 21. Simplified diagram of flexible deployable unit motion analysis
表 1 模型参数
Table 1. Model parameters
参数 值/mm 参数 值/mm lDE 4257 lBE 1456 lDF 600 辐条截面边长 50 lBD 4000 连接杆截面边长 50 lAB 100 预张紧柔索直径 10 lBC 1600 固定机构底面直径 20  下载: 导出CSV
下载: 导出CSV
表 2 材料参数
Table 2. Material parameters
材料 弹性模量/GPa 泊松比 密度/g·cm−3 QY8911/T300
碳-BMI复合材料132 0.32 1.5 Kevlar索 123 0.3 1.45
下载: 导出CSV
-
[1] Cianciolo A D, Powell R W. Entry, descent, and landing guidance and control approaches to satisfy mars human mission landing criteria[J]. Spaceflight Mechanics,2017,160:1397−1410 [2] Lillard R, Olejniczak J. Human mars edl pathfinder study: assessment of technology development gaps and mitigations[C]. IEEE Aerospace Conference, 2017: 1-8 [3] 董捷, 饶炜, 王闯, 等. 国外火星探测典型失败案例分析与应对策略研究[J]. 航天器工程,2019,5(5):122−129 (in Chinese) doi: 10.3969/j.issn.1673-8748.2019.05.019 Dong Jie, Rao Wei, Wang Chuang, et al. Research on the typical failure cases and coping strategy of foreign mars exploration[J]. Spacecraft Engineering,2019,5(5):122−129 doi: 10.3969/j.issn.1673-8748.2019.05.019 [4] Subrahmanyam P, Rasky D. Entry, descent, and landing technological barriers and crewed mars vehicle performance analysis[J]. Progress in Aerospace Sciences,2017,91(1):1−26 [5] Xu Miao, Xu Yiteng, Xiang Shiqi, et al. A model for the simulation of the mars edl process[J]. Journal of Physics: Conference Series,2022,2282:012017 doi: 10.1088/1742-6596/2282/1/012017 [6] Li, Shuang, Jiang Xiuqiang. Review and prospect of guidance and control for mars atmospheric entry[J]. Progress in Aerospace Sciences,2014,69:40−57 doi: 10.1016/j.paerosci.2014.04.001 [7] 马广富, 龚有敏, 郭延宁, 等. 载人火星探测进展及其EDL过程GNC关键技术[J]. 航空学报,2020,41(7):23651−023651 (in Chinese) doi: 10.7527/S1000-6893.2020.23651 Ma Guangfu, Gong Youmin, Guo Yanning, et al. Human mars mission: research progress and gnc key technologies during edl[J]. Acta Aeronauticaet Astronautica Sinica,2020,41(7):23651−023651 doi: 10.7527/S1000-6893.2020.23651 [8] Wercinski P, Smith B, Yount B, et al. ADEPT sounding rocket one (SR-1) flight experiment overview[C]. 2017 IEEE Aerospace conference, 2017: 1-7 [9] Cassell A M, Brivkalns C A, Bowles J V, et al. Human mars mission design study utilizing the adaptive deployable entry and placement technology[C]. IEEE Aerospace Conference, 2017: 1-16 [10] Cassell A, Smith B, Wercinski P, et al. ADEPT, A Mechanically Deployable Re-Entry Vehicle System, Enabling Interplanetary CubeSat and Small Satellite Missions[J]. 2018 [11] Salotti J M. Launcher size optimization for a crewed mars mission[J]. Acta Astronautica,2022,191:235−244 doi: 10.1016/j.actaastro.2021.11.016 [12] Peacocke L, Bruce P J K, Santer M. Coupled aerostructural modeling of deployable aerodecelerators for mars entry[J]. Journal of Spacecraft & Rockets,2019,56(4):1221−1230 [13] Xiangyang Hou, Hong Nie, Hao Wang, et al. Aerodynamic deceleration of ultra-large deployable heat-resistant structures for efficient descending of space station payload[J]. Microgravity Science and Technology,2022,34(4):55 doi: 10.1007/s12217-022-09972-1 [14] Danielle S. O’Driscoll, Paul J. K. Bruce, et al. Design and dynamic analysis of rigid foldable aeroshells for atmospheric entry[J]. Journal of Spacecraft and Rockets,2021,58(3):741−753 doi: 10.2514/1.A34845 [15] 张鹏, 苏南, 赵铄, 等. 半刚性机械展开式气动减速技术机构与热防护研究[J]. 航天返回与遥感,2019,40(6):1−10 (in Chinese) Zhang Peng, Su Nan, Zhao Shuo, et al. Research on mechanism and thermal protection of semi-rigid mechanical deployable aerodynamic deceleration technology[J]. Spacecraft Recovery & Remote Sensing,2019,40(6):1−10 [16] Chen Zijie, Shi Chuang, Guo Hongwei, et al. Design of a deployable mechanism based on 7R-6R-double-loop units for mars decelerators[J]. Mechanism and Machine Theory,2023,181:105180 doi: 10.1016/j.mechmachtheory.2022.105180 [17] Soutis, Constantinos. Wu, Rui. Diver, Carl, et al. Flexible heat shields deployed by centrifugal force.[J]. Acta Astronautica,2018,152:78−87 doi: 10.1016/j.actaastro.2018.06.021 [18] 史明东, 原梅妮, 侯秀成, 等. 机械展开式超音速气动减速器模态分析[J]. 兵器装备工程学报,2018,39(4):143−146 (in Chinese) doi: 10.11809/bqzbgcxb2018.04.030 Shi Mingdong, Yuan Meini, Hou Xiucheng, et al. Analysis on natural vibration characteristics of deployable aerodynamic decelerator[J]. Journal of Ordnance Equipment Engineering,2018,39(4):143−146 doi: 10.11809/bqzbgcxb2018.04.030 [19] Peacocke L, O’Driscoll D, Bruce P, et al. Mechanically deployable aero-decelerators for mars entry[C]//International Conference on Flight Vehicles, Aerothermodynamics and Re-entry Missions and Engineering. Monopoli, 2019 [20] 李丽芳, 郭朋真, 刘荣强. 一种空间超大型可展开柔性聚光器[J]. 航空学报,2018,39(201):722187−722187 (in Chinese) Li Lifang, Guo Pengzhen, Liu Rongqiang. A space large-scale deployable compliant concentrator[J]. Acta Aeronauticaet Astronautica Sinica,2018,39(201):722187−722187 [21] Sudarshan K, Bingyan L. Design of Lightweight Deployable antennas using the tensegrity principle[A]. 16th Biennial International Conference on Engineering, Science, Construction, and Operations in Challenging Environments[C], Cleveland, Ohio , 2018 [22] 高明星, 刘荣强, 李冰岩, 等. 空间可展开三棱柱伸展臂设计与优化[J]. 机械工程学报,2020,56(15):129−137 (in Chinese) doi: 10.3901/JME.2020.15.129 Gao Mingxing, Liu Rongqiang, Li Bingyan, et al. Design and optimization of space deployable tri-prism mast[J]. Journal of Mechanical Engineering,2020,56(15):129−137 doi: 10.3901/JME.2020.15.129 [23] Shi, Chuang , Guo, Hongwei , Cheng, Yadi. et al Design and multi-objective comprehensive optimization of cable-strut tensioned antenna mechanism[J]. Acta Astronautica. 2021, 178: 406-422 [24] Xiao, Hang, Lv, Shengnan, Ding, Xilun. Tension cable distribution of a membrane antenna frame based on stiffness analysis of the equivalent 4-SPS-S parallel mechanism.[J]. Mechanism & Machine Theory,2018,124:133−149 [25] 肖航, 吕胜男, 李龙, 等. 基于线性互补理论的可展开索-桁架结构静力学分析[J]. 机械工程学报,2022,58(5):18−25(in Chinese) Xiao Hang, Lv Shengnan, Li Long, et al. Static Analysis of deployable cable-truss structures based on linear complementarity theory[J]. Journal of Mechanical Engineering,2022,58(5):18−25 [26] Danielle S O D, Paul J K B, Matthew S. Origami-based tps folding concept for deployable mars entry vehicles[C]//AIAA Scitech Forum. 2020: 1897 -
计量
- 文章访问数: 331
- HTML全文浏览数: 331
- PDF下载数: 2
- 施引文献: 0