
 首页
首页 登录
登录 注册
注册



-
高精度数字温度计利用铂电阻阻值随温度变化的特性来进行温度测量, 在精密测量和工业应用中占有重要地位, 广泛应用于环境监测、医疗健康、工业自动化等领域. 如在疫苗和生物制品的存储与运输过程中, 必须维持严格的温度范围以防止产品失效或降解. 高精度数字温度计则能够提供必要的温度监控, 确保药品在整个供应链中的稳定性. 此外, 在冷藏、冷冻及热处理等过程中, 精确测量和温度监控对于保障过程稳定性、优化产品性能和推动科学研究也具有基础性作用 [1–3]. 在中低温测温领域, 标准铂电阻温度计最为精确, 但标准铂电阻温度计价格昂贵、制造工艺复杂、不耐振动、易碎和配套设备昂贵等问题, 限制了其在生产和使用中的普及率. 基于工业铂电阻的高精度数字温度计, 因研制成本低、精度适中、稳定可靠, 已成为当下温度计量的一个研究热点[4,5], 但其测量精度相对一般且随使用年限增加出现阻值漂移, 因此也制约了其在高精尖领域的应用和发展. 而温度修正算法则是有效提升其测量精度和稳定性的必要手段[6–8].
目前, 适用于数字温度计的修正方法主要采 用补偿函数修正算法和分段线性修正算法相结合[9–11]. 补偿函数修正算法通过多项式拟合(polynomial fitting)、最小二乘法(least square)、B样条拟合(B-spline fitting)、非均匀B样条拟合(un-uniform B-spline fitting)等算法[12–18]对原始采集的温度修正值进行曲线拟合, 从而得到该温度计全量程内的温度修正曲线, 能取得较好的修正效果. 但补偿函数修正算法仅适用于出厂前修正. 在后续使用中, 使用者通过溯源仅能获得少量温度点的修正值, 无法有效拟合出全量程的温度修正曲线. 因此, 其不适用于后续使用中修正, 且无法解决随使用年限增加而出现阻值漂移导致的测温偏差问题. 分段线性修正算法原理简单, 主要用于后续使用中修正, 在示值误差为线性变化时, 能取得较为不错的修正效果. 但在面对温度修正曲线非线性变化时, 则存在较大误差. 在实际试验中, 数字温度计的温度修正曲线通常为非线性变化. 为提高修正精度, 则需增加线性分段数量或人为地将每条温度修正曲线根据曲线变化规律划分为多个线性分段, 但工作量也会随之增加, 且普适性和灵活性较差.
因此, 本文提出了一种基于伪逆法(pseudo inverse, PINV)的温度修正曲线重建算法, 用于数字温度计修正. 该算法不仅可以克服人为干预, 且面对非线性变化和阻值漂移时能获得更好的修正效果, 具有良好的灵活性和普适性, 有效提高数字温度计的测量精度.
-
重建算法是本文温度修正的核心算法, 其建立了原始标定数据与多个特征温度点之间的关系. 标定阶段, 用标准铂电阻温度计和精密测温电桥, 得到完整的温度修正曲线
$ {{\boldsymbol{r}}_{{\text{cal}}}}\left( {P \times 1} \right) $ , 并根据温度修正曲线选取特征温度点组合作为响应矩阵$ {{\boldsymbol{u}}_{{\text{cal}}}}\left( {M \times 1} \right) $ . 因此, 温度修正曲线重建算法的目的是通过建立$ {{\boldsymbol{r}}_{{\text{cal}}}} $ 与$ {{\boldsymbol{u}}_{{\text{cal}}}} $ 之间的逆数学模型, 以计算得到重建矩阵W$ (P\times M) $ . 在重建阶段, 通过重建矩阵W和实际测量的待重建特征温度点u便能重建各个温度点的完整修正曲线[19], 如(1)式所示:式中,
$ {{\hat {\boldsymbol{r}}}} $ 为重建的完整温度修正曲线, W为建立的重建矩阵, u为待重建的特征温度点. -
伪逆法因其模型建立简单, 原理简洁易懂而广泛地应用于重建算法中[20]. 根据温度修正曲线重建原理可知, 重建算法的核心在于重建矩阵的建立, 而若可以直接对矩阵U进行取逆应算, 便可直接求得重建矩阵W:
式中, 矩阵R为标定温度修正曲线数据集; 矩阵U为与标定数据集合相对应的特征温度点响应矩阵集合; U +代表U的伪逆矩阵. 因响应矩阵集合U不是方阵, 无法直接求得其逆矩阵. 因此, 通过求出U的广义逆矩阵, 采用奇异值分解进行求解, U的伪逆矩阵可以表示为
式中, A, V均为正定矩阵, S为对角矩阵. 将求得的重建矩阵和实际测得的特征温度点代入(1)式, 便可完成完整修正曲线的重建. 因数字温度计随使用年限增加将出现阻值漂移, 因此, 将每次重建后的温度修正曲线自动纳入原始标定数据样本库中, 从而提高样本库的多样性, 保证温度修正曲线的有效性和准确性.
-
将本文提出的重建算法和伪逆法应用于温度曲线修正, 算法过程如图1所示, 算法步骤如下:
1) 采集原始标定数据, 并确定特征温度点组合;
2) 通过伪逆法建立原始标定数据与特征温度点组合相对应的重建矩阵;
3) 将实际测得的待重建特征温度点代入(1)式, 重建完整的温度修正曲线;
4) 将重建后的温度修正曲线自动纳入原始标定数据样本库中, 并重新建立新原始标定数据与特征温度点组合相对应的重建矩阵.
-
本文选用基于工业铂电阻的数字温度计作为被测仪器, 标准器选用标准铂电阻温度计和精密测温电桥, 恒温槽选用酒精槽、水槽和油槽. 为保证原始标定数据的有效性, 从–100—250 ℃每隔5 ℃进行测量, 每隔2个月采集一次, 共3次, 并在4个月后采集一次完整温度修正曲线用于算法验证.
-
图2为被测仪器在–100—250 ℃温度区间内测量得到的温度修正曲线. 可以看到温度修正值在测量温度上、下限时最大, 且随温度的变化呈非线性关系. 同时, 温度修正值也随数字温度计使用时间增加出现缓慢漂移.
由于传统多段线性修正算法受特征温度点个数的影响较大, 温度修正效果随特征温度点个数的增加而提升. 因此, 为更好地验证本文算法能有效地进行温度修正且优于传统算法, 分别对特征温度点个数为4, 5, 6, 7和8时进行实验验证. 特征温度点的选取尽可能等分选取, 如表1所示.
基于传统多段线性修正算法和本文算法重建的温度修正曲线如图3所示. 可以看到传统多段线性修正算法在仅选取4个和5个特征温度点进行修正时, 温度修正效果较差. 这是因为面对温度修正曲线非线性变化时, 少量的特征温度点无法有针对性地将温度修正曲线有效划分为多个线性分段. 只有随着特征温度点的增加, 温度修正曲线被近似划分为多个线性分段, 温度修正效果才能得到较好的改善, 但这也给使用者增加了溯源成本和检测时间. 而基于本文算法重建的温度修正曲线相较多段线性修正算法有了明显的提升, 与实际测得的温度修正曲线基本吻合, 且受特征温度点个数的影响较小.
为更直观地观察温度修正效果, 引入均方根误差(RMSE)用于评估重建温度修正曲线的准确度, 如(7)式所示:
式中,
$ {{\hat {\boldsymbol{r}}}} $ 为重建的完整温度修正曲线, r为标准铂电阻温度计采集的完整温度修正曲线, N为修正曲线的采样点数.通过分段线性修正算法和本文算法重建的温度修正曲线的RMSE值见表2. 可以清楚地看到, 本文算法重建的温度修正曲线的RMSE值优于分段线性修正算法. 这是因为基于伪逆法的重建算法的核心本质是通过建立重建矩阵进行温度修正曲线重建, 而重建矩阵的建立与原始数据相关性较大, 这也使得重建的温度修正曲线能较好地还原实际温度修正曲线的变化. 尤其在温度修正曲线为非线性变化时, 该算法的优势更为突出. 温度修正效果随特征温度点的增加可以得到一定的改善, 但并不明显. 这是因为该温度修正曲线变化较为平缓, 只有在温度修正曲线变化剧烈且不规则时, 特征温度点的增加才能有效提高温度修正效果. 另一方面, 因数字温度计随使用年限增加将出现阻值漂移, 而阻值漂移通常是有规律可循, 极少出现不规则漂移. 因此, 将每次重建后的温度修正曲线自动纳入原始标定数据样本库中, 可以极大提高样本库的多样性, 从而保证重建矩阵的有效性.
为进一步验证本文所提算法具有更好的普适性和灵活性, 通过选取不同的特征温度点组合进行实验验证. 特征温度点的选取在表3列出, 方案一通过包含量程上下限的同时, 在量程范围内尽可能等分选取; 方案二通过从量程下限向上均匀选取, 但不包含量程上限; 方案三根据温度修正曲线变化规律, 将曲线划分为多个变化平缓的非线性分段, 并将交接点作为特征温度点, 同时尽可能均匀选取. 基于方案一、方案二、方案三重建的温度修正曲线如图4(a)—(c)所示, 重建的温度修正曲线的RMSE值分别为0.0065, 0.0073, 0.0061. 可以看到方案三的RMSE值最优, 这是因为该方案特征温度点组合最大限度包含了温度修正曲线的特征, 建立的重建矩阵能更好地反映温度修正曲线的变化规律. 整体而言, 改变不同特征温度点组合虽然对重建的温度修正曲线有一定的影响, 但整体变化不大. 这说明该算法具有良好的普适性, 不必根据温度修正曲线的变化而选取特征温度点组合, 只需对温度量程尽可能进行均匀划分选取, 便能得到良好的修正效果, 这极大提高了修正效率.
-
本文提出了一种基于伪逆法的温度修正曲线重建算法. 该方法通过重建矩阵的建立, 能有效地重建完整温度修正曲线, 不仅克服了传统补偿函数修正算法无法解决阻值漂移导致测温偏差的问题; 且与传统的多段线性修正算法相比, 能获得更好的修正效果. 该算法受特征温度点个数和选取组合影响较小, 极大提高了修正效率, 且具有更好的普适性和灵活性. 此外, 该算法通过不断扩充原始数据库, 实时更新重建矩阵, 能使重建的温度修正曲线始终保持良好的修正效果, 有效提高了数字温度计的长期稳定性. 这对于需要长期稳定运行和高精度温度监控的工业过程控制、医疗健康、环境监测等领域具有重要意义. 因此, 本文所提算法能为提升数字温度计的测量精度和稳定性提供有效的支撑. 下一步, 将基于本文所提算法的基础上, 研制一款稳定可靠的基于工业铂电阻的高精度数字温度计. 同时, 探索本文所提算法在其他类型传感器数据修正中的应用潜力, 如湿度、压力等物理量的测量.
基于伪逆法的数字温度计温度修正曲线重建算法
Algorithm of reconstrucing temperature correction curve of digital thermometer based on pseudo inverse method
-
摘要:
目前, 基于工业铂电阻的高精度数字温度计已成为当下热门研究方向, 但受材料和制作工艺的影响, 其测量精度相对一般, 且随使用年限的增加, 出现阻值漂移导致测温偏差在所难免. 温度修正算法是提高数字温度计测量精度的有效方法, 传统的补偿函数修正算法修正效果良好, 但无法解决阻值漂移等问题; 分段线性修正算法原理简单、易于实现, 但需多点测温, 且在面对温度修正曲线非线性变化时, 限制了修正准确度和普适性. 因此, 本文提出了一种基于伪逆法的温度修正曲线重建算法. 该方法利用原始标定数据和多个特征温度点建立重建矩阵. 在实际使用中, 通过待重建的特征温度点便能重建完整的温度修正曲线, 并将重建的温度修正曲线自动纳入样本库中, 从而提高样本的多样性和算法的修正精度. 实验结果表明, 该算法在面对温度修正曲线非线性变化和漂移时, 具有更好的修正效果, 且仅需采集4个特征温度点便能较好地重建完整的温度修正曲线. 因此, 该算法可以为提高数字温度计测量精度提供有效的支撑.
Abstract:At present, high-precision digital thermometers based on industrial platinum resistance have become a popular research direction and are widely used in environmental monitoring, medical health, industrial automation and other fields. However, due to the influence of materials and manufacturing processes, the measurement accuracy is average. With the increase of service life, it is inevitable that the temperature measurement deviation will be caused by the drift of the resistance value. The algorithm of correcting temperature is an effective method to improve the measurement accuracy of digital thermometers. Traditional compensation function correction algorithms such as polynomial fitting and B-spline fitting have good correction effect, but the problems of resistance drift cannot be solved. The segmented linear correction algorithm is simple and easy to implemente, but it requires multi-point temperature measurements. Because of the nonlinear changes of the temperature correction curve, the correction effect is average, which limits its correction accuracy and universality. Therefore, we propose n algorithm of reconstructing temperature correction curve based on the pseudo inverse method. Firstly, the reconstruction matrix is built by using the original data and multiple characteristic temperature points. Then, the complete temperature correction curve is reconstructed by the characteristic temperature points to be reconstructed and the reconstruction matrix. Finally, the reconstructed temperature correction curve is automatically included in the sample database, which improves the diversity of samples and the correction accuracy of the algorithm. Experimental results show that the proposed algorithm has a better correction effect on nonlinear changes and drifts of the temperature correction curve. And the proposed algorithm is less affected by the number of characteristic temperature points and the selection combination. The complete temperature correction curve is well reconstructed by collecting only 4 characteristic temperature points. Therefore, the proposed algorithm can provide the effective support for improving the measurement accuracy of digital thermometer.
-

-
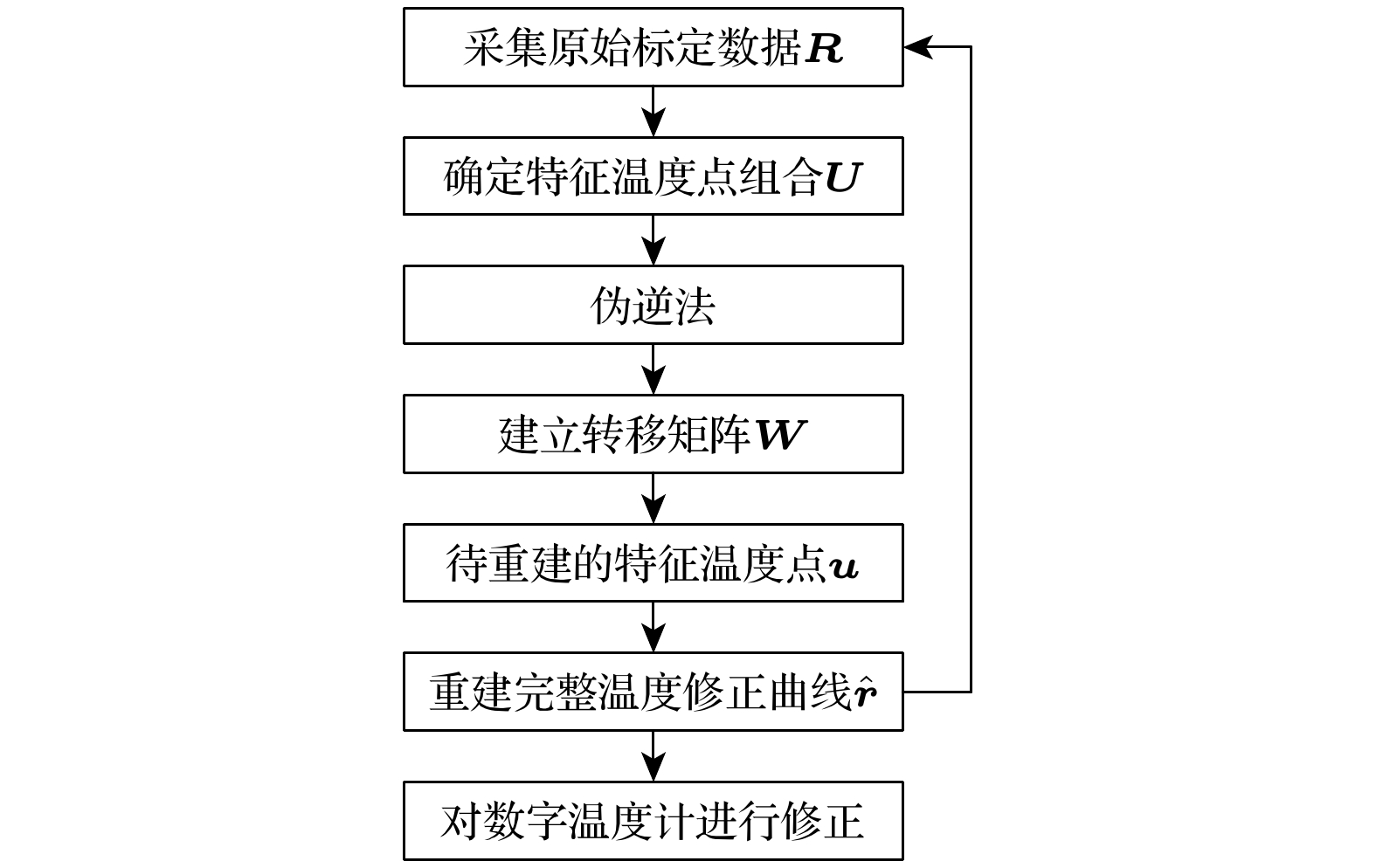
图 1 基于伪逆法的温度修正曲线重建算法流程
Figure 1. Process of temperature correction curve reconstruction algorithm based on PINV.
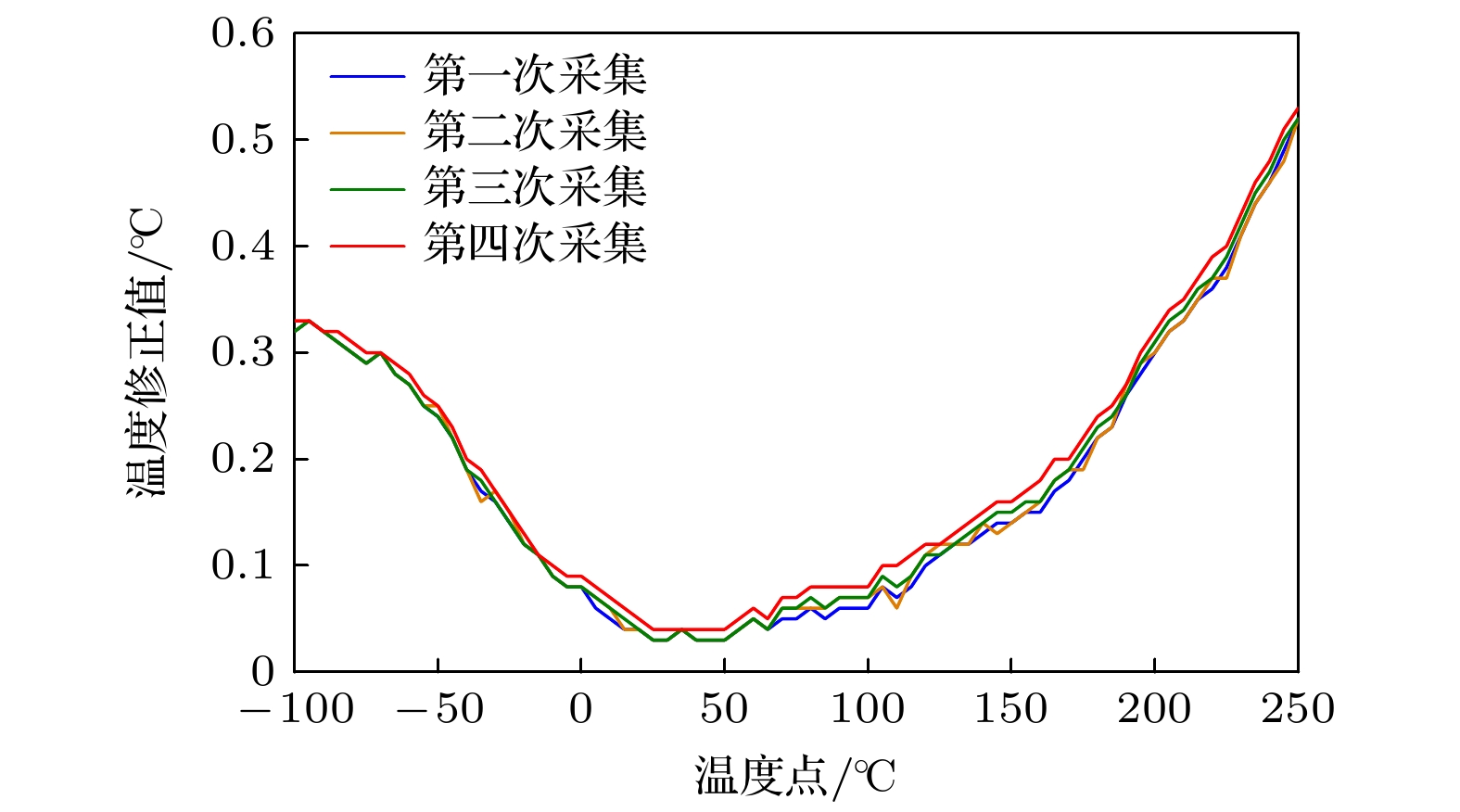
图 2 不同时间下采集的温度修正曲线
Figure 2. Temperature correction curve measured by different times.
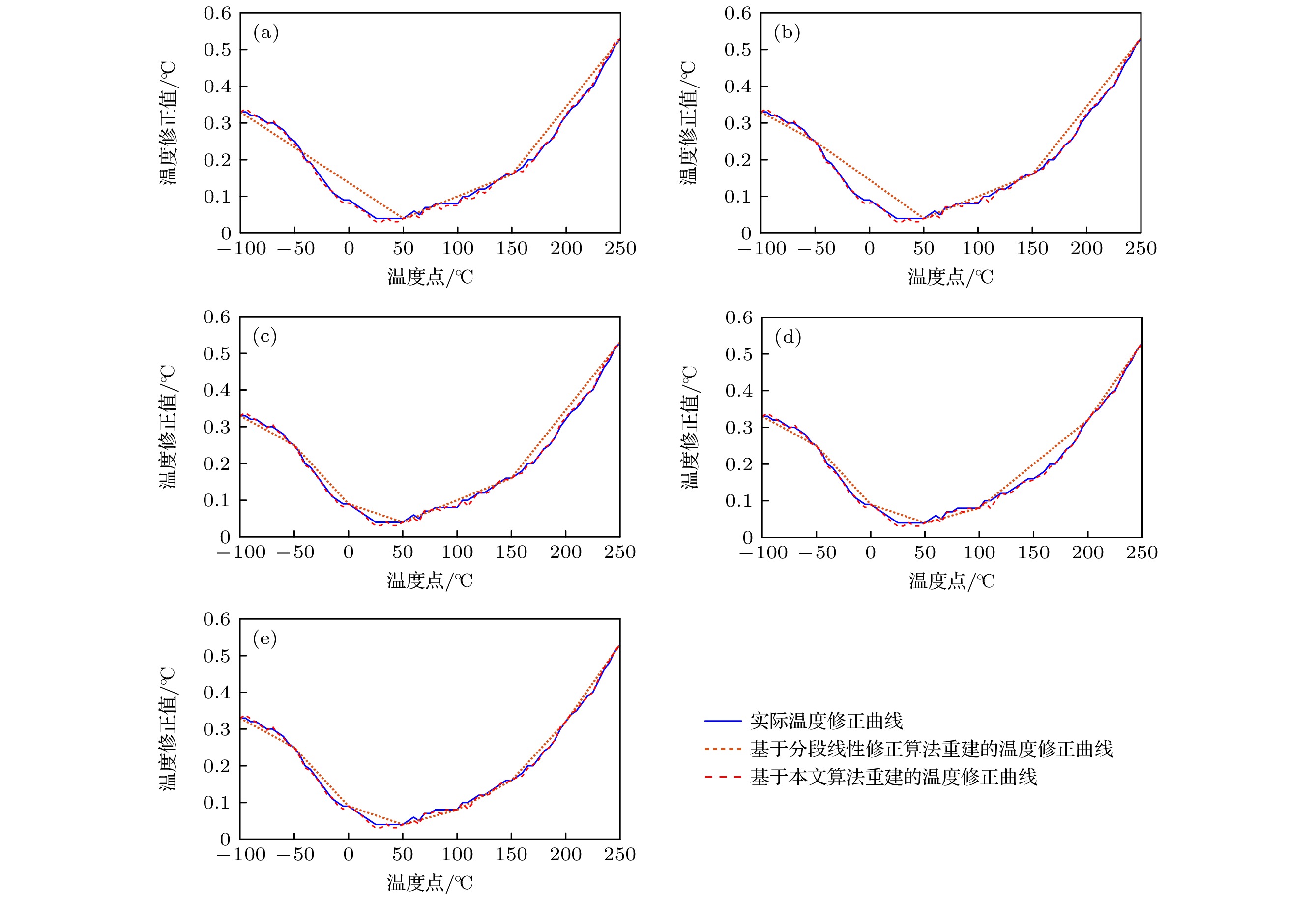
图 3 不同特征温度点个数情况下, 基于分段线性修正算法和本文算法重建的温度修正曲线 (a) 特征温度点个数为4; (b) 特征温度点个数为5; (c) 特征温度点个数为6; (d) 特征温度点个数为7; (e) 特征温度点个数为8
Figure 3. Reconstructed temperature correction curve based on the piecewise linear correction algorithm and the proposed algorithm by different number of characteristic temperature points: (a) Number of characteristic temperature points is 4; (b) number of characteristic temperature points is 5; (c) number of characteristic temperature points is 6; (d) number of characteristic temperature points is 7; (e) number of characteristic temperature points is 8.
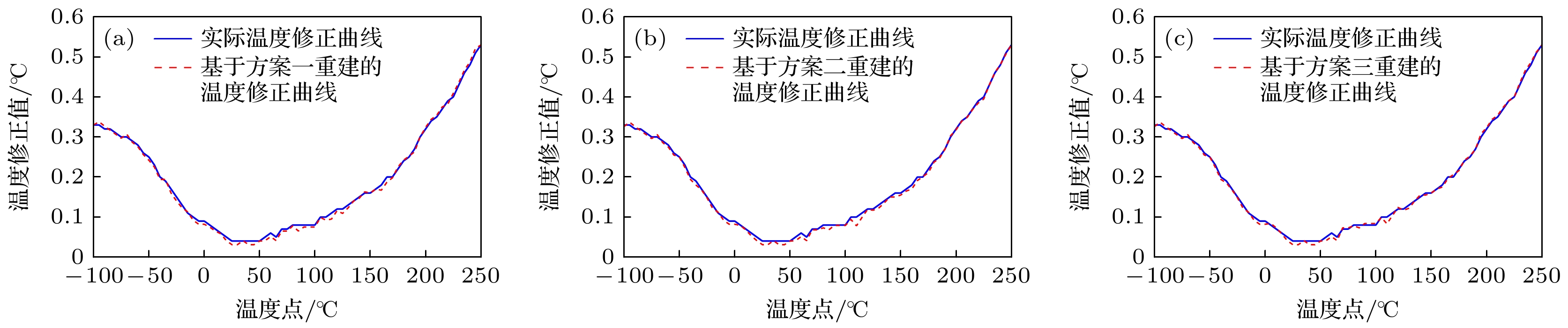
图 4 在3种方案情况下基于本文算法重建的温度修正曲线 (a) 方案一; (b) 方案二; (c) 方案三
Figure 4. Reconstructed temperature correction curve based on the proposed algorithm by three schemes: (a) Scheme 1; (b) scheme 2; (c) scheme 3.
表 1 不同特征温度点个数情况下的特征温度点组合
Table 1. Combination of characteristic temperature points by different number of characteristic temperature points.
特征温度点数量/个 4 5 6 7 8 特征温度点1/℃ –100 –100 –100 –100 –100 特征温度点2/℃ 50 –50 –50 –50 –50 特征温度点3/℃ 150 50 0 0 0 特征温度点4/℃ 250 150 50 50 50 特征温度点5/℃ — 250 150 100 100 特征温度点6/℃ — — 250 200 150 特征温度点7/℃ — — — 250 200 特征温度点8/℃ — — — — 250  下载: 导出CSV
下载: 导出CSV
表 2 基于分段线性修正算法和本文算法重建的温度修正曲线的RMSE值
Table 2. RMSEs of the reconstructed temperature correction curve based on the piecewise linear correction algorithm and the proposed algorithm.
特征温度点数量/个 4 5 6 7 8 多段线性修正算法
/RMSE值0.0264 0.0288 0.0176 0.0190 0.0129 本文算法/RMSE值 0.0065 0.0055 0.0054 0.0057 0.0054
下载: 导出CSV
表 3 不同特征温度点组合方案
Table 3. Combination schemes by different characteristic temperature points.
特征温度
点1/℃特征温度
点2/℃特征温度
点3/℃特征温度
点4/℃方案一 –100 50 150 250 方案二 –100 0 100 200 方案三 –50 50 150 250
下载: 导出CSV
-
[1] Preston-Thomas H 1990 Metrologia 27 186 doi: 10.1016/0021-9614(90)90018-L [2] Coakley K J, Clark A V, Hehman C S 2003 Meas. Sci. Technol. 14 21 doi: 10.1088/0957-0233/14/6/401 [3] 方院生, 王琦, 丁诚, 王文龙, 唐曦凌, 马勇 2015 测控技术 11 9 doi: 10.3969/j.issn.1000-8829.2015.07.003 Fang Y S, Wang Q, Ding C, Wang W L, Tang X L, Ma Y 2015 Meas. Con. Technol. 11 9 doi: 10.3969/j.issn.1000-8829.2015.07.003 [4] 方院生, 姚丽娟, 肖勇, 王琦 2014 测控技术 33 145 doi: 10.3969/j.issn.1000-8829.2014.08.037 Fang Y S, Yao L J, Xiao Y, Wang Q 2014 Meas. Con. Technol. 33 145 doi: 10.3969/j.issn.1000-8829.2014.08.037 [5] 胡静静, 沈媛媛 2024 流体测量与控制 5 23 Hu J J, Shen Y Y 2024 Fluid Measurem. Contr. 5 23 [6] 任建平, 孙建平, 李婷, 何佳融, 曾佳旭 2021 计量学报 42 589 doi: 10.3969/j.issn.1000-1158.2021.05.08 Ren J P, Sun J P, Li T, He J R, Zeng J X 2021 Acta Metrol. Sin. 42 589 doi: 10.3969/j.issn.1000-1158.2021.05.08 [7] Pearce J V, Rusby R L, Harris P M 2013 Metrologia 50 345 doi: 10.1088/0026-1394/50/4/345 [8] Babita P U, Meena H, Gupta G 2022 Measurement 203 111994 doi: 10.1016/j.measurement.2022.111994 [9] 冯邻江, 卢明肖, 周寻, 严俐, 蔡翱, 谢雨辰 2024 自动化技术与应用 43 57 doi: 10.20033/j.1003-7241.(2024)05-0057-05. Fen L J, Lu M X, Zhou X, Yan L, Cai A, Xie Y C 2024 Techn. Automat. Appl. 43 57 doi: 10.20033/j.1003-7241.(2024)05-0057-05. [10] 何慎之 2024 中国仪器仪表 6 53 doi: 10.3969/j.issn.1005-2852.2024.02.009 He S Z 2024 China Instrum. 6 53 doi: 10.3969/j.issn.1005-2852.2024.02.009 [11] 魏永超, 刘倩倩, 朱泓超, 朱姿翰, 李锦 2024 红外技术 46 843 We Y C, Liu Q Q, Zhu H C, Zhu Z H, Li J 2024 Infrared Technol. 46 843 [12] 吴志祥, 周祥才, 黄亮, 陈功 2014 自动化与仪表 2 57 doi: 10.3969/j.issn.1001-9944.2014.01.015 Wu Z X, Zhou X C, Huang L, Chen G 2014 Automat. Instrumentation 2 57 doi: 10.3969/j.issn.1001-9944.2014.01.015 [13] 王昕, 康哲铭, 刘龙, 范贤光 2020 物理学报 69 200701 doi: 10.7498/aps.69.20200552 Wang X, Kang Z M, Liu L, Fan X G 2020 Acta Phys. Sin. 69 200701 doi: 10.7498/aps.69.20200552 [14] 王昕, 康哲铭, 刘龙, 范贤光 2020 光子学报 49 0330001 doi: 10.3788/gzxb20204903.0330001 Wang X, Kang Z M, Liu L, Fan X G 2020 Acta Photonica Sin. 49 0330001 doi: 10.3788/gzxb20204903.0330001 [15] Cadusch P J, Hlaing M M, Wade S A 2013 J. Raman. Spectrosc. 44 1587 doi: 10.1002/jrs.4371 [16] Martin T, Cohen E, Kirby R M 2009 Comput. Aided Geom. D. 26 648 doi: 10.1016/j.cagd.2008.09.008 [17] Wang W, Pottmann H, Liu Y 2006 ACM T. Graphic. 25 214 doi: 10.1145/1138450.1138453 [18] 魏国, 王昕, 雷苗, 孙圣和 2008 传感器与微系统 27 54 doi: 10.3969/j.issn.1000-9787.2008.08.017 Wei G, Wang X, Lei M, Sun S H 2008 TMT 27 54 doi: 10.3969/j.issn.1000-9787.2008.08.017 [19] 刘龙 2021 博士学位论文(厦门: 厦门大学) Liu L 2021 Ph. D. Dissertation (Xiamen: Xiamen University [20] Chen S, Ong Y H, Liu Q 2012 J. Raman. Spectrosc. 44 875 doi: 10.1002/jrs.4293 -
计量
- 文章访问数: 737
- HTML全文浏览数: 737
- PDF下载数: 6
- 施引文献: 0