
 首页
首页 登录
登录 注册
注册



 下载:
下载:

-
激光的远场焦斑分布是高功率激光装置光束质量的主要指标,也是物理实验的关键参数,焦斑分布直接反映了强激光的可聚焦能力,关系到激光能否顺利通过物理靶孔,因此,获取多路焦斑的形态分布为选择合适的物理靶、改善焦斑质量以适应物理靶的要求提供实验依据。
实际的高功率激光受放大、传输和终端光路中多种因素[1](如元件面型、热畸变、气流扰动、损伤点等)的影响,焦斑形态不均匀且不稳定,不符合ICF对激光驱动的要求。为了得到稳定、均匀的焦斑,人们提出了多种束匀滑方法[2-5],时间域束匀滑方法的光谱色散匀滑(SSD),结合空间域匀滑方法的连续相位板CPP)已经成为高功率激光焦点整形的主流手段,而目前的束匀滑及测试技术研究多数集中在长时间积分的焦斑不均匀性控制上[6],对于具体的焦斑时间演化特性、焦斑相干性研究较少。激光焦斑的测量方法主要有列阵相机法、衍射光栅法、纹影法等,通过分区测试、拼接等实现高动态范围的焦斑测量,都是针对单一光束的高动态范围焦斑测试[7-11]。这些实验技术为了实现多路激光的集束焦斑测量,通过对科学CCD进行离线的灵敏度和动态范围标定,搭建焦斑光学测试平台,测试多路激光集束焦斑时间积分的空间分布,获得了集束焦斑的能量集中度;测试多路激光到达靶点的时间同步性,获得了集束焦斑多路激光零同步差到达靶点;对条纹相机增益系数、狭缝宽度、扫描时间等性能参数进行离线测试标定,实验中获得了时间分辨的集束焦斑特性;实验方法和结果为集束焦斑的认识,光束的光谱色散匀滑的分析和优化等提供了实验方法及数据支撑。
-
首先对使用的科学CCD进行灵敏度和动态范围的离线标定,合理设置各路激光强度使得CCD工作在最佳线性区域,然后采用科学CCD对集束焦斑空间分布进行时间积分测试。
-
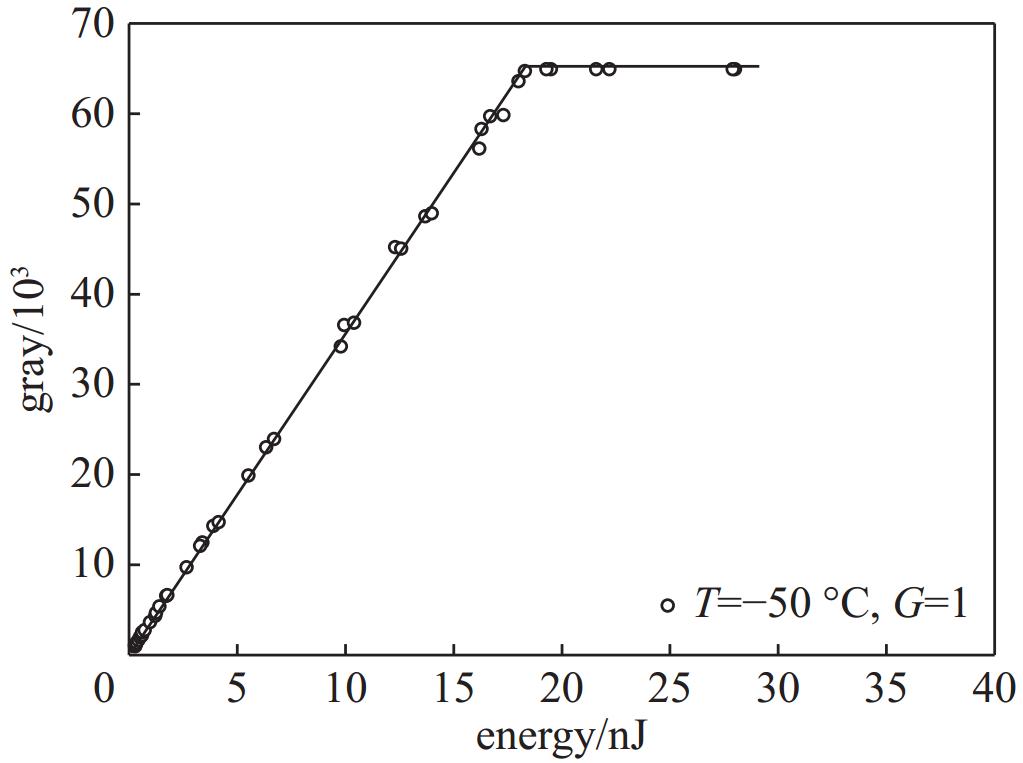
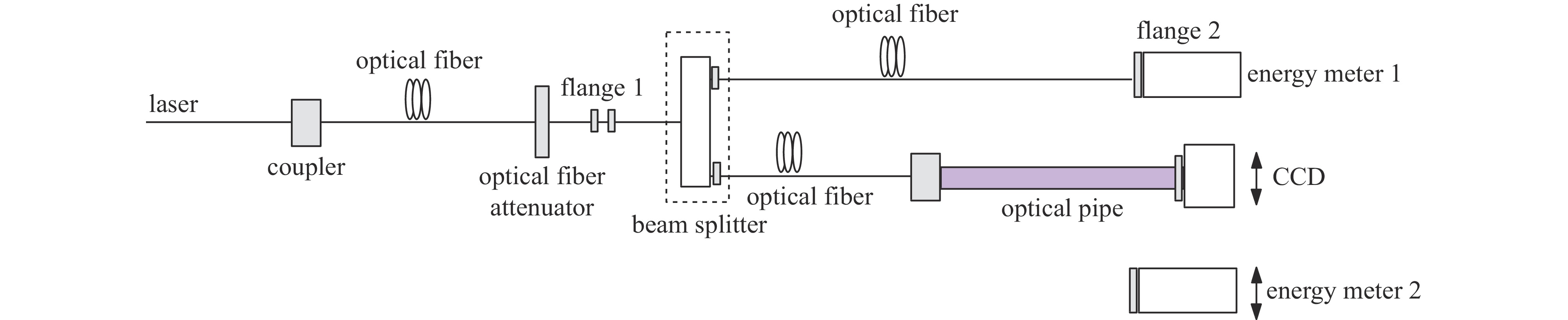
为了实现高功率激光远场焦斑的高动态范围CCD测量,在测试集束焦斑之前,对CCD动态范围和灵敏度进行测试,测量原理图见图1。脉冲宽度为1 ns的三倍频激光耦合到光纤,通过法兰1转接到一分二的分束器,采用分光方法,其中一束光通过光纤,进入能量计1,另一束光通过光纤、耦合器和光管道进入能量计2。首先通过调节光纤衰减器不断改变由法兰1进入分束器的光束能量,分别读取能量计1和能量计2的能量值E1和E2,根据E2与E1能量比值,给出一分二分束器的分光系数比
$ {{k = {E_2}} \mathord{\left/ {\vphantom {{k = {E_2}} {{E_1}}}} \right. } {{E_1}}} $ ;移出能量计2并推入测量用CCD,调节CCD位置,光斑基本位于CCD中央。调节光纤衰减器改变入射到分束器的能量,使得入射到CCD的能量逐步增加,分别采集CCD图像,同时读取能量计1的读数值E1′,光入射到CCD的能量为kE1′,CCD灰度值为某一个固定区域内像元灰度平均值。实验中,设置增益G=1,入射到CCD的能量-灰度曲线见图2。由图2可以看出,入射到CCD的能量在0.1~18 nJ范围内CCD灰度呈线性变化,可以得到CCD响应的动态范围为1~180倍。集束焦斑测量,光束放大后约为8 mm×8 mm大小的光斑,参照CCD能量-灰度曲线,CCD离线标定光斑根据像素个数换算面积约0.3 mm2,这样,对于脉冲宽度1 ns的激光能量约3 μJ比较合适,所以集束焦斑测量入射到CCD的三倍频激光能量按照约3 μJ进行配置。
-
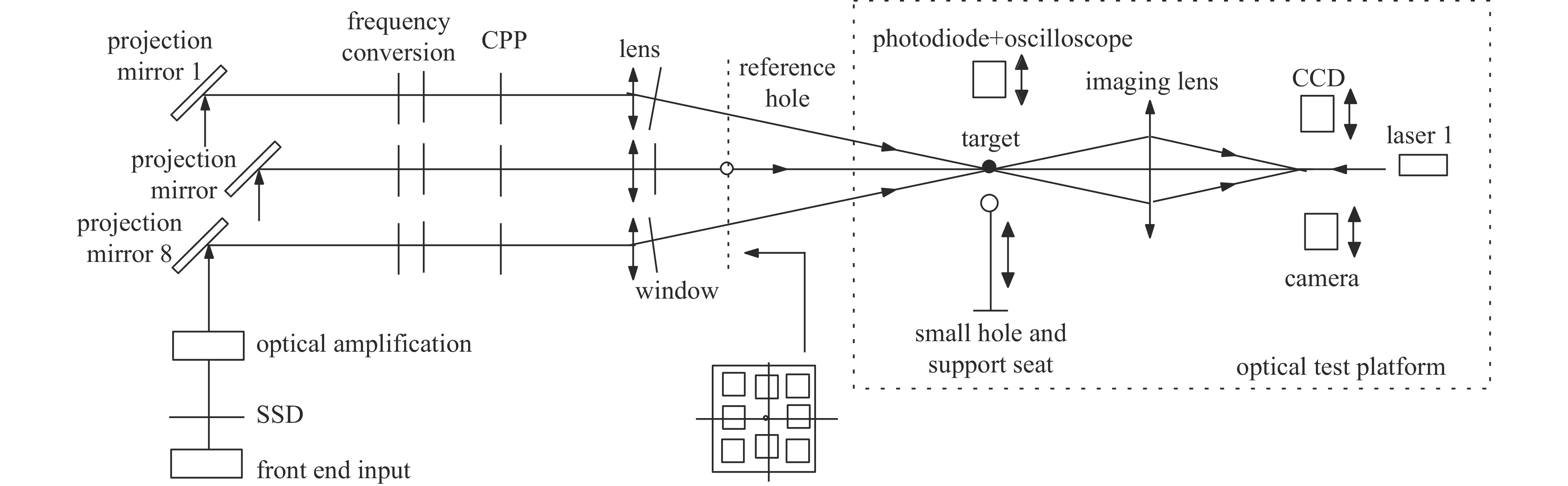
前端输入光束经过光谱色散匀滑、光放大后经过投射镜进入频率转换组件、连续相位板、透镜及真空窗口会聚在靶点,如图3所示,分别调节每路光束投射镜姿态,通过靶点光束监视系统使得多路激光会聚在靶点。在靶点架设小孔,调节激光器1姿态,使得出射光束穿过靶点和多路激光集束的基准孔,实验预计将靶点焦斑放大约8倍,设计成像透镜,计算靶点到成像透镜的距离,按照成像透镜的理论计算位置放置成像透镜,调节成像透镜姿态,与光路准直。关闭激光器1,放置CCD并沿轴向前后移动,使集束光斑成像在CCD上,CCD测试时间积分的集束焦斑。
三倍频激光八路集束光斑成像在CCD上,CCD测得的积分集束焦斑及相应的能量集中度计算结果见图4。图4(b)表示能量占比与光斑尺寸(以衍射极限DL为单位)之间的关系,其中,光束口径360 mm,则对应方光束的一倍衍射极限为1DL=1.95 μrad,光束焦距f=12 m,由图4可以看出,八路集束焦斑的80%能量分布在32.5DL,则对应焦斑大小为0.760 mm,即八路集束焦斑的80%能量分布在0.760 mm范围内。
-
采用“光电管+示波器”的方法对多路光束到达靶点的同时性进行测试。在靶点架设光电管测试各路激光到达靶点的时间波形,以某一路光束(N3)为基准光束,分别测试光束与基准光束的时间波形相对关系,之后分别调节每路激光器的输入端,使得测试光束与基准光束同步,进而实现多路光束到达靶点“零同步差”。图5(a)给出采用“光电管+示波器”方法四路激光同步调节前的时间波形(余辉采集模式),采用条纹相机测试的时间波形见图5(b)。由余辉采集模式得到的时间波形5(a),以一光束在示波器上多次测量的最可几峰值作为测量点,可以计算出任意二束光(或者一束光相对于基准光束)的时间同步差值。对某一路光束相对基准光束的时间同步差值进行多次测量,同步时间差的最大值与最小值之间差值即为某一路光束的同步晃动,由于每路光束的时间波形形状有差异,通常以时间波形的后沿重合为判据得到光束的同步晃动,实验中光束N1,S1的同步晃动测试分别为10、15 ps。考虑到激光器每路的输入端时间同步调节精度(约1 ps)、测试设备(光电管+示波器)测试精度(按照最大取样率80 G/s,分辨率为12.5 ps)、及光束晃动偏差(不大于20 ps),可以得出“光电管+示波器”方法测试多路光束到达靶点同步精度可控制在30 ps以内。
高功率激光器要求多路激光同时到达靶点,调节激光器输入端,实现多路光束到达靶点“零同步差”。根据实验要求,可以通过“光电管+示波器”测试时间波形对时间同步测调,达到“零同步差”,也可以采用条纹相机测试时间波形对时间同步进行精密调试。根据条纹相机测试的多路激光时间波形,精密调节激光器输入端,图6给出采用条纹相机测试光束S1与N1“零同步差”图像,为了观测更加直观,将光束S1与N1在空间上略微调偏。
-
为了获得完美的时间分辨图像,需要测试图像对比度大,噪声小,图像的最大灰度值要接近CCD最大灰度而不饱和,这就需要根据入射光束强度合理选择条纹相机的增益系数、狭缝宽度、入射光束衰减等参数,故实验之前需要对条纹相机增益系数、狭缝宽度、扫描时间等性能参数进行离线测试标定。搭建了基于条纹相机的光成像系统,测试多路光束集束的高时空分辨的焦斑,得到光谱色散匀滑光束焦斑精细的时空演化图像。
-
采用WBr灯进行标定,待光源稳定后,固定相机狭缝宽度、扫描宽度、CCD曝光时间,保持测试平台其他实验条件不变,不断改变条纹相机增益,采集图像,如图7(a)所示,取图像的一个固定的时间间隔内所有像素灰度之和,可以得到增益系数与强度灰度关系。设增益为0时,强度灰度设为1,当增益分别设定为10、20、30、40、50等时,强度灰度变化为4、16、64、130、512倍,见图7(b),可以看出,增益系数与相对强度灰度关系呈非线性变化。
-
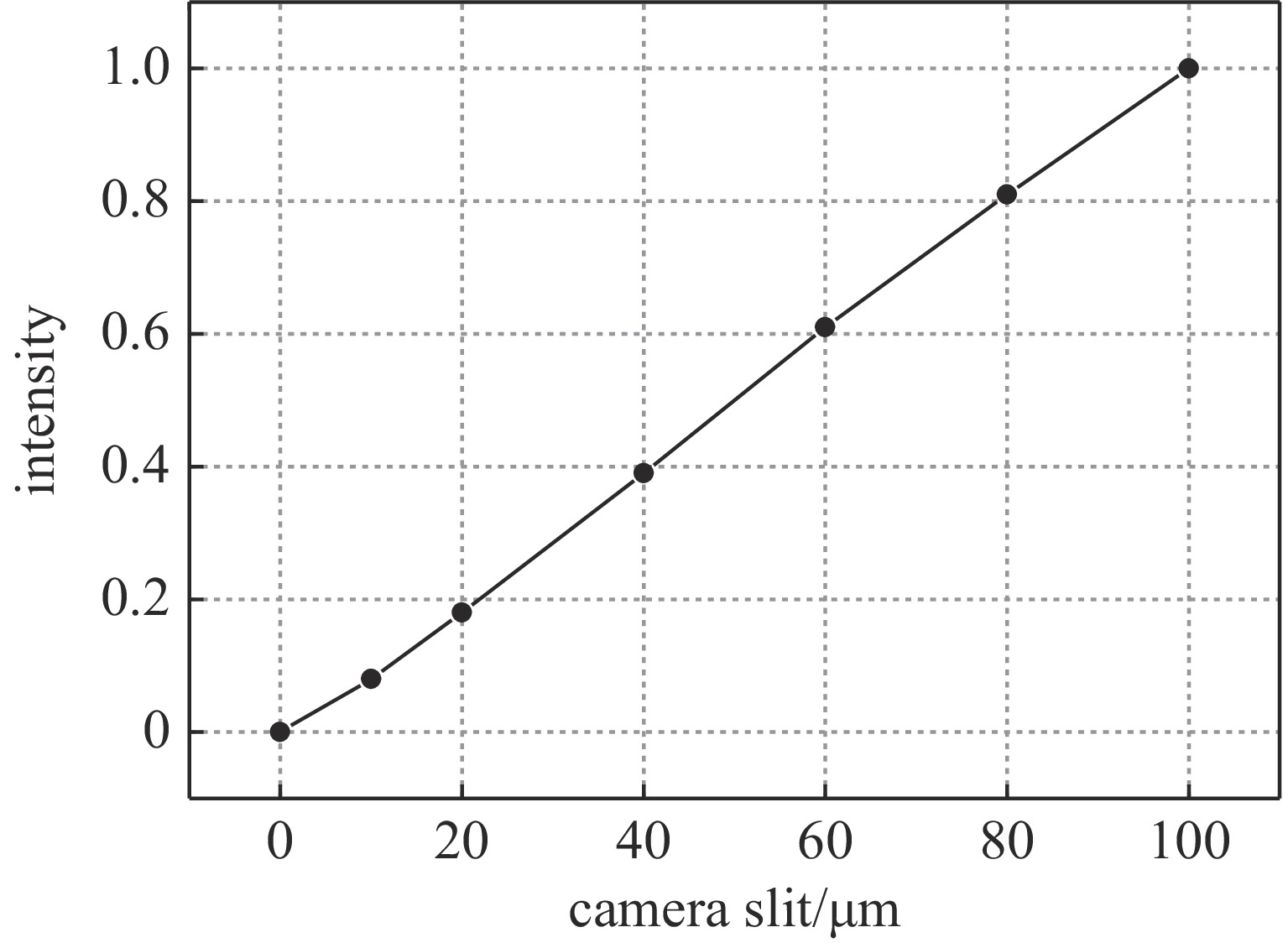
固定条纹相机增益、扫描宽度、CCD曝光时间,保持其它实验条件不变,不断改变相机狭缝宽度,采集图像,得到相机狭缝宽度与强度灰度关系。设相机狭缝宽度为10 μm时相对强度灰度为1,当相机狭缝宽度分别为20、40、60、80、100 μm时,强度灰度变化分别为2、4、6、8、10倍,由图8可以看出相机狭缝宽度与相对强度灰度基本呈线性变化关系。
-
固定相机狭缝宽度、条纹相机增益、扫描宽度、CCD曝光时间,保持其它实验条件不变,不断改变相机扫描时间宽度,采集图像,得到相机扫描时间宽度与强度灰度关系。归一强度灰度处理,当扫描时间为2 ns时,相对强度灰度设为1,当扫描时间分别设定为为5 ns和10 ns时,强度灰度变化为2.48和4.86倍,可以看出,相机扫描时间宽度与相对强度灰度基本呈线性变化关系。
-
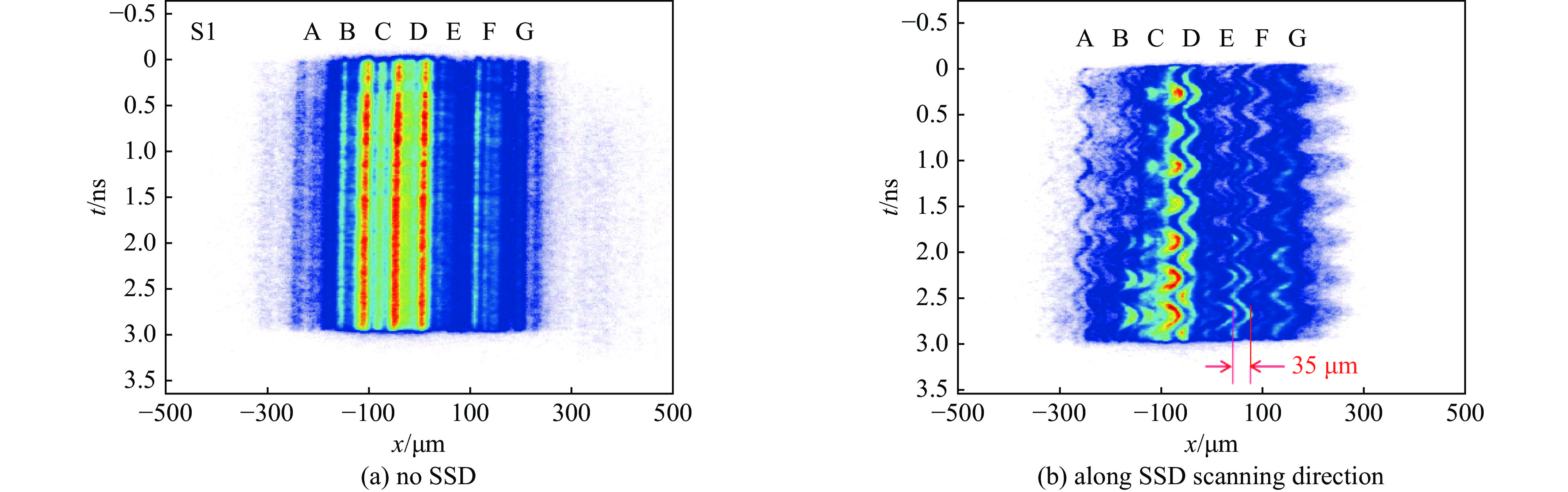
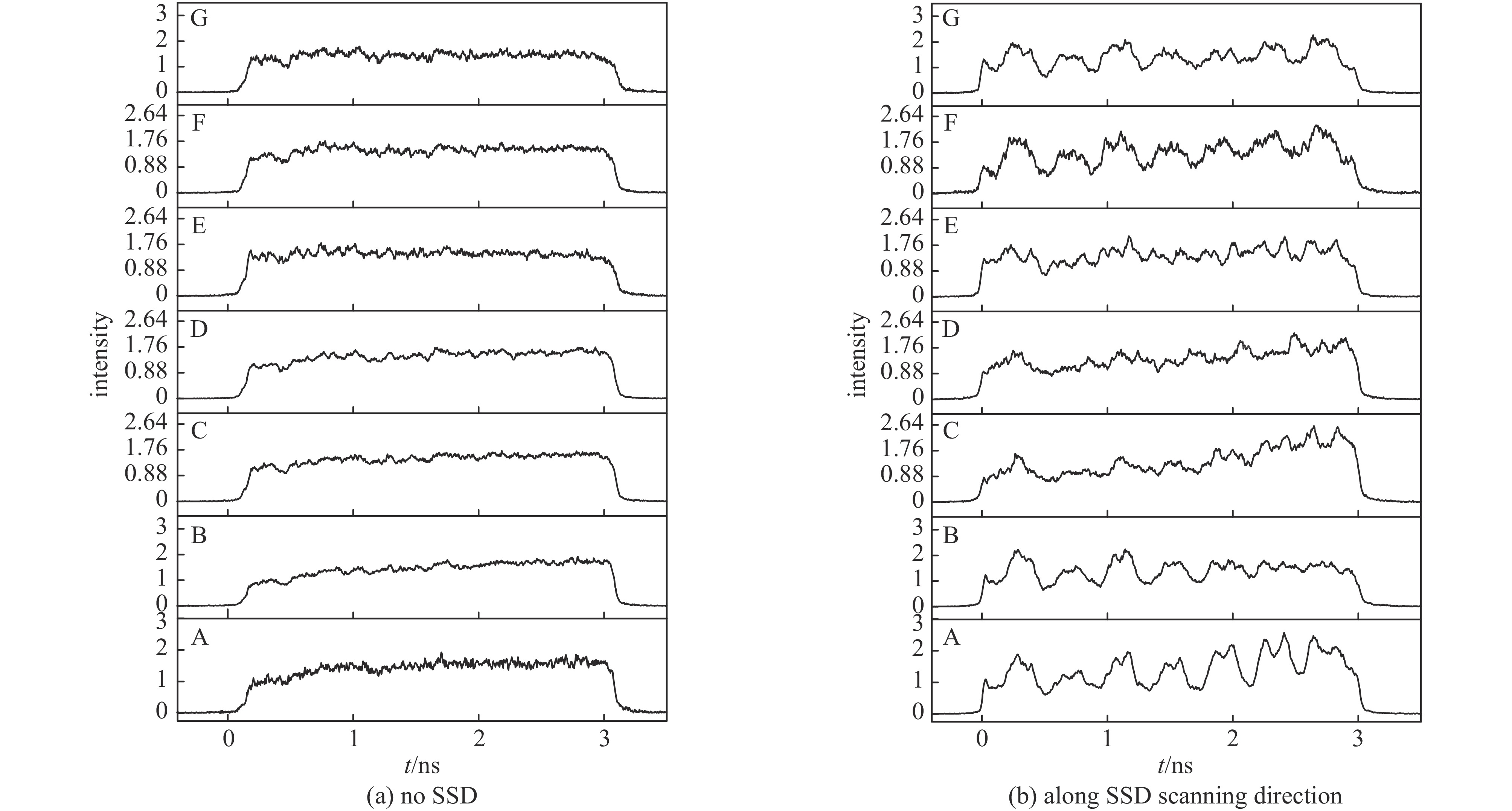
通过一套光学系统将多光束的聚焦光斑进行放大后,条纹相机对焦斑进行时间分辨测量,通过带时间分辨的焦斑测试评估集束聚焦的时空性能,主要是聚焦区域不同位置的波形一致性和光束匀滑性能。实验中,考虑激光器前端发射的能量、功率密度水平和条纹相机的响应特性,合理给出成像系统放大倍数。通过实验设计和条纹相机精密调试,综合考虑入射光束强度及条纹相机参数,采集到了完整的焦斑数据,获得了焦斑时空特性。在此举例给出无SSD条件下的窄带激光和沿SSD扫动方向的光束焦斑动态特性分别见图9(a)和9 (b),其他实验结果在此不再赘述。
由图9(a)可见,无SSD焦斑各区域强度随时间的变化比较稳定,在图像的水平方向,即条纹相机的狭缝方向,光束的空间分布不均匀。图9(b)中,调频的SSD脉冲聚焦光斑存在明显的时空调制,主要表现为:焦斑各局部区域存在较强的幅度调制,不同区域调制步调不一致,但基本有与调频相同的周期(SSD扫动方向的区域与调频周期相同),实验结果验证了SSD脉冲的光束匀滑理论[2-4]。
图10给出无SSD和沿SSD扫动方向的不同区域(A~G)各点的脉冲时间波形。由图10(a)可以看出,无SSD窄带条件下的焦斑时空特性,聚焦各区域的时间波形稳定一致,脉冲波形具备100 ps的上升沿。图10(b)中,沿SSD扫动方向条件下的焦斑时空特性,由于SSD的扫动带来了各点的脉冲时间波形局部的幅度调制,不同区域的幅度调制并不一致,幅度调制周期基本相同。
由于条纹相机复杂的光电转换过程,其空间分辨率限制了最小散斑的观测。相机实际空间分辨率可以这样简单估算,将图4的CCD采集的焦斑图像给定一个空间频率值进行高频滤波,同时根据图9(a)得到条纹相机测得图像的最小条纹宽度,如果条纹相机测得图像的最小条纹宽度与给定空间频率值计算得到的条纹宽度相同,则给定的空间频率倒数即为条纹相机的实际空间分辨率。
-
将CCD灵敏度和动态范围离线标定作为基础,通过合理设置多路激光集束光强度,获得多路激光集束CCD焦斑;采用光电管+示波器、条纹相机测试多路激光集束到达靶点的同时性,调节激光器每路的输入端,实现多路光束到达靶点“零同步差”;对条纹相机增益系数、狭缝宽度、扫描时间等性能参数进行测试标定,设计光学放大系统,综合考虑入射光束强度及条纹相机参数,开展多路激光集束聚焦的时间分辨的焦斑测试,通过评估多路激光集束聚焦的时空性能,主要是聚焦区域不同位置的波形一致性和光束匀滑性能,提升了聚焦光斑焦斑性能的认知,建立了多路激光集束光束匀滑及相干性的测试方法。由于条纹相机只是对焦斑的一个空间窄区域的时间分辨诊断,故激光焦斑二维高时间分辨测试技术是今后对于焦斑精密诊断需要开展的一个主要研究方向。
多路激光集束的焦斑测试技术
Focal spot measurement technology of multi-beam laser bunching
-
摘要: 为了实现多路激光集束焦斑测量,给出其时间和空间分辨的特性,搭建了基于成像系统、光电管结合示波器、条纹相机和科学CCD等主要部件组成的焦斑光学测试平台。实验之前,对科学CCD的灵敏度和动态范围及条纹相机增益系数、狭缝宽度、扫描时间等性能参数进行离线测试标定。采用CCD测试多路激光时间积分的集束焦斑空间分布;采用光电管结合示波器及条纹相机对多路激光到达靶点的时间同步进行测试;开展高质量集束焦斑的时间分辨特性测试,获得了光谱色散匀滑光束焦斑精细的时空演化图像。多路激光集束焦斑形态及多路光束时间同步测试为提升高功率激光装置焦斑测试技术和方法提供了支撑。Abstract: To realize multi-channel laser cluster focal spot measurement and give its temporal and spatial resolution characteristics, a focal spot optical measurement platform based on imaging system, photodiode combined with oscilloscope, streak camera and scientific CCD is built. Before the experiment, the sensitivity and dynamic range of the scientific CCD and the performance parameters of the streak camera, such as gain coefficient, slit width and scanning time, were tested and calibrated off-line. The CCD is used to measure the spatial distribution of multi-channel laser cluster focal spot with time integration. By using photodiode combined with oscilloscope and streak camera, the time synchronization of multi-channel laser reaching the target is tested. The time-resolved characteristics of high-quality cluster focal spot are measured, and the fine spatio-temporal evolution image of spectral dispersion smooth beam focal spot is obtained. The test of focal spot shape and time synchronization of multi-beam channel laser cluster provide support for improving focal spot test technology and method of high-power laser device.
-
Key words:
- multi-beam laser facility /
- focal spot /
- time-resolved /
- synchronization .
-

-
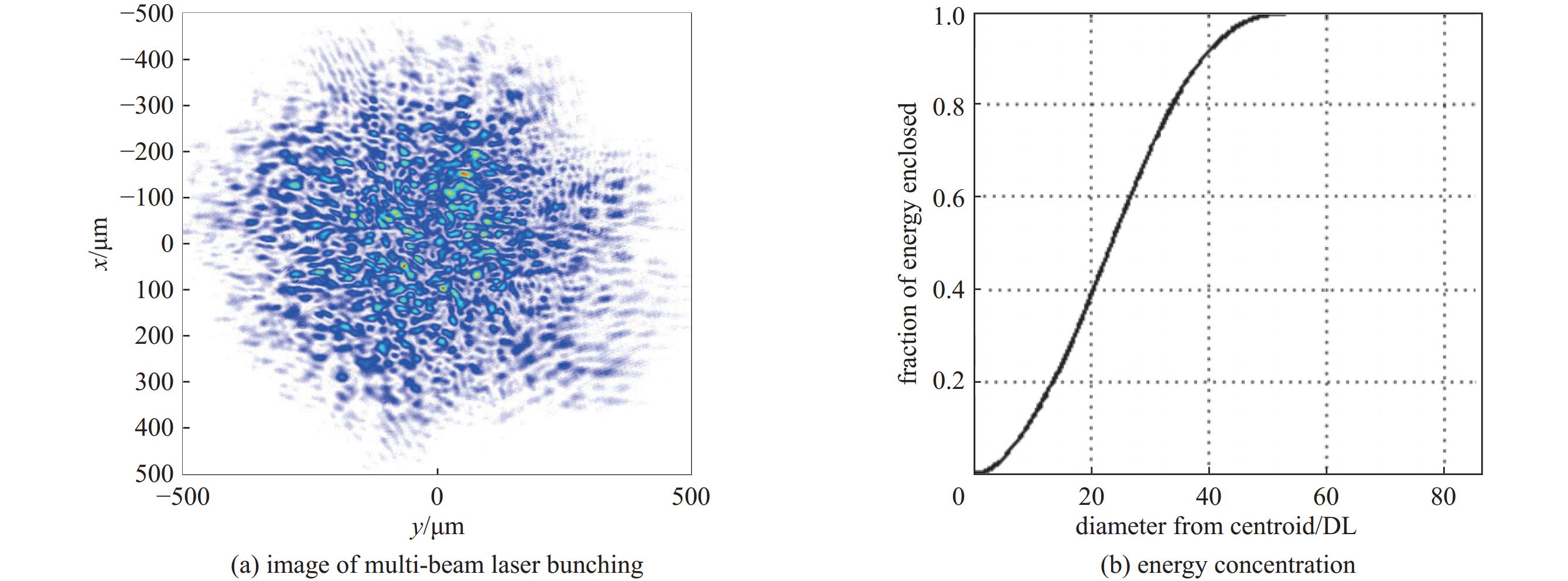
图 4 积分的集束焦斑形貌及焦斑能量集中度
Figure 4. Image of multi-beam laser bunching and energy concentration distribution

图 6 二路光束到达靶点的“零同步差”图像
Figure 6. “Zero synchronization difference” image of two beams reaching the target
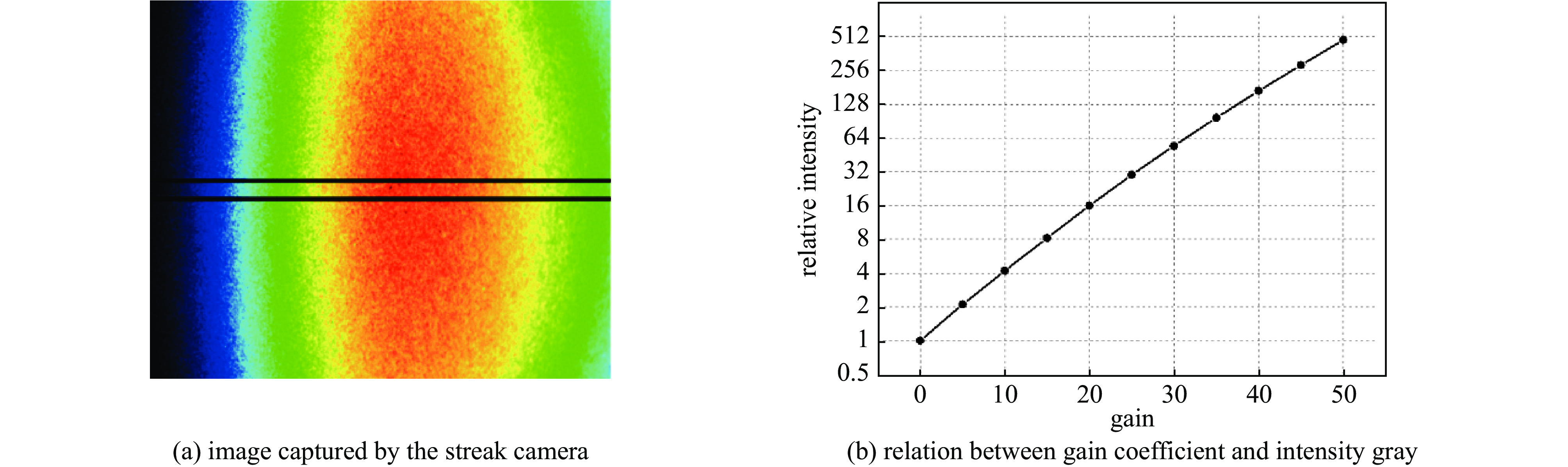
图 7 条纹相机采集的图像及增益系数与相对强度灰度关系
Figure 7. Image captured by the streak camera and the relation between gain coefficient and intensity gray
-
[1] 冯青屹, 祖小涛, 刘春明, 等. ICF装置靶场关键材料的辐照效应研究进展[J]. 强激光与粒子束, 2023, 35:091001 doi: 10.11884/HPLPB202335.230007 Feng Qingyi, Zu Xiaotao, Liu Chunming, et al. Progress of research on irradiation effects in key materials in ICF facilities[J]. High Power Laser and Particle Beams, 2023, 35: 091001 doi: 10.11884/HPLPB202335.230007 [2] 高妍琦, 李福建, 季来林, 等. 高功率激光驱动器光束匀滑技术研究(特邀)[J]. 红外与激光工程, 2020, 49:20201074 doi: 10.3788/IRLA20201074 Gao Yanqi, Li Fujian, Ji Lailin, et al. Research of beam smoothing technology in high power laser driver (Invited)[J]. Infrared and Laser Engineering, 2020, 49: 20201074 doi: 10.3788/IRLA20201074 [3] 贺军, 李平, 柴向旭, 等. 光谱色散匀滑光束焦斑动态特性的实验研究[J]. 中国激光, 2022, 49:1105001 doi: 10.3788/CJL202249.1105001 He Jun, Li Ping, Chai Xiangxu, et al. Experimental study on dynamic characteristics of focal spots of spectral dispersion smoothing beams[J]. Chinese Journal of Lasers, 2022, 49: 1105001 doi: 10.3788/CJL202249.1105001 [4] 郑天然, 张颖, 耿远超, 等. “强度扫动”光束匀滑特性的理论研究[J]. 激光与光电子学进展, 2018, 55:111405 Zheng Tianran, Zhang Ying, Geng Yuanchao, et al. Theoretical research of “intensity sweep” laser beam smoothing characteristics[J]. Laser & Optoelectronics Progress, 2018, 55: 111405 [5] 杨春林. 强聚焦条件下连续位相板散斑特性的矢量分析[J]. 强激光与粒子束, 2023, 35:032001 doi: 10.11884/HPLPB202335.220260 Yang Chunlin. Vector analysis on the characteristics of continuous phase plate speckle under the strong focusing[J]. High Power Laser and Particle Beams, 2023, 35: 032001 doi: 10.11884/HPLPB202335.220260 [6] Bauer K A, Heimbueger M, Kwiatkowski J, et al. Optical characterization of the on-target OMEGA focal spot at high energy using the full-beam in-tank diagnostic[J]. Applied Optics, 2020, 59(26): 7994-8002. doi: 10.1364/AO.395505 [7] 王拯洲, 王伟, 夏彦文. 高动态范围激光焦斑测量数学模型研究[J]. 光子学报, 2014, 43:1010002 doi: 10.3788/gzxb20144310.1010002 Wang Zhengzhou, Wang Wei, Xia Yanwen. Mathematical model for the measurement of high dynamic range laser focal spot[J]. Acta Photonica Sinica, 2014, 43: 1010002 doi: 10.3788/gzxb20144310.1010002 [8] 周继权, 王庆. 基于相机阵列的高动态范围图像合成方法[J]. 计算机应用研究, 2013, 30(9):88-92 doi: 10.3969/j.issn.1001-3695.2013.09.076 Zhou Jiquan, Wang Qing. Camera array-based HDR image synthesis method[J]. Application Research of Computers, 2013, 30(9): 88-92 doi: 10.3969/j.issn.1001-3695.2013.09.076 [9] 贺元兴, 李新阳. 基于衍射光栅的远场焦斑测量新方法[J]. 中国激光, 2012, 39:0208001 doi: 10.3788/CJL201239.0208001 He Yuanxing, Li Xinyang. Far-field focal spot measurement based on diffraction grating[J]. Chinese Journal of Lasers, 2012, 39: 0208001 doi: 10.3788/CJL201239.0208001 [10] 王拯洲, 王力, 魏际同, 等. 基于旁瓣光束衍射反演的强激光远场焦斑测量方法[J]. 光学 精密工程, 2022, 30(4):380-402 doi: 10.37188/OPE.20223004.0380 Wang Zhengzhou, Wang Li, Wei Jitong, et al. Measurement for far-field focal spot of high power laser based on the diffraction inversion of sidelobe beam[J]. Optics and Precision Engineering, 2022, 30(4): 380-402 doi: 10.37188/OPE.20223004.0380 [11] 陈晓义, 段亚轩, 王拯洲, 等. 基于多步相位恢复的激光远场焦斑测量方法[J]. 中国激光, 2022, 49:0704002 doi: 10.3788/CJL202249.0704002 Chen Xiaoyi, Duan Yaxuan, Wang Zhengzhou, et al. Laser far-field focal spot measurement method based on multistep phase retrieval[J]. Chinese Journal of Lasers, 2022, 49: 0704002 doi: 10.3788/CJL202249.0704002 -
图( 10)
计量
- 文章访问数: 549
- HTML全文浏览数: 549
- PDF下载数: 3
- 施引文献: 0