
 首页
首页 登录
登录 注册
注册



-
微机电系统(Micro electro-mechanical system,MEMS)扫描镜是指采用光学MEMS技术制造,将微反射镜与微执行器集成在一起的光学MEMS器件,能够用来调整入射光束的空间分布[1-3]。因其具有体积小、功耗低、响应速度快和扫描频率高等优势,广泛的应用于激光投影[4]、激光雷达[5]、光通信[6]以及生物医学[7]等领域。激光雷达作为自动驾驶[8]中重要的感知器件,近年来随着自动驾驶的兴起,为其提供了广阔的市场前景。
MEMS 扫描镜根据其驱动原理的不同,一般可以分为电磁驱动[9-10]、压电驱动[11-12]、电热驱动[13-14]和静电驱动[15-17]等四类。静电驱动相对于另外三种驱动方式,具有体积小、功耗低、谐振频率高、结构简单且制备工艺与集成电路工艺兼容等优点被广泛采用。静电驱动根据其驱动器结构不同可分为:平行板、平面梳齿和垂直梳齿等三种结构,其中垂直梳齿结构相较于另外两种有两个优势:其一不存在平行板驱动的静电拉入效应;其二能够提供较大的离面运动扭矩。
近年来一些机构研制的MEMS扫描镜大多谐振频率较低,例如Seunghwan Moon等[18]提出一种带有倾斜静止梳的静电双轴框架反射镜扫描仪,然而慢轴在80 V的驱动电压下的谐振频率仅有263 Hz,扫描角度为8.5°;单亚蒙等[19]制作了二维静电驱动谐振式MEMS扫描镜,简化了电隔离沟槽的制备工艺,其镜面在40 V和50 V电压驱动下,慢轴和快轴的谐振频率分别为328.2 Hz和1618.2 Hz,相对应的光学扫描角分别为21°和16°,同样存在谐振频率偏小的缺点;Russell Farrugia等[20]提出了结合直接和间接静电驱动配置的扫描镜,其具有高达25 kHz的谐振频率,且光学扫描角约为37°,但此时的驱动电压也达到了200 V。因此可以看出静电驱动MEMS扫描镜主要存在器件的谐振频率较低、驱动电压较高等缺点,使其无法满足激光雷达等高性能场合的应用要求。
为了得到一种高谐振频率、低驱动电压的MEMS扫描镜,本文从提高谐振频率和驱动力矩的角度出发,对梳齿驱动器的原理进行分析,设计了梳齿轴对称结构。同时在镜面两侧采用弧形分布形式,增加器件面积的利用率,该结构能在保证不增大驱动电压的同时设计出更高的谐振频率。
-
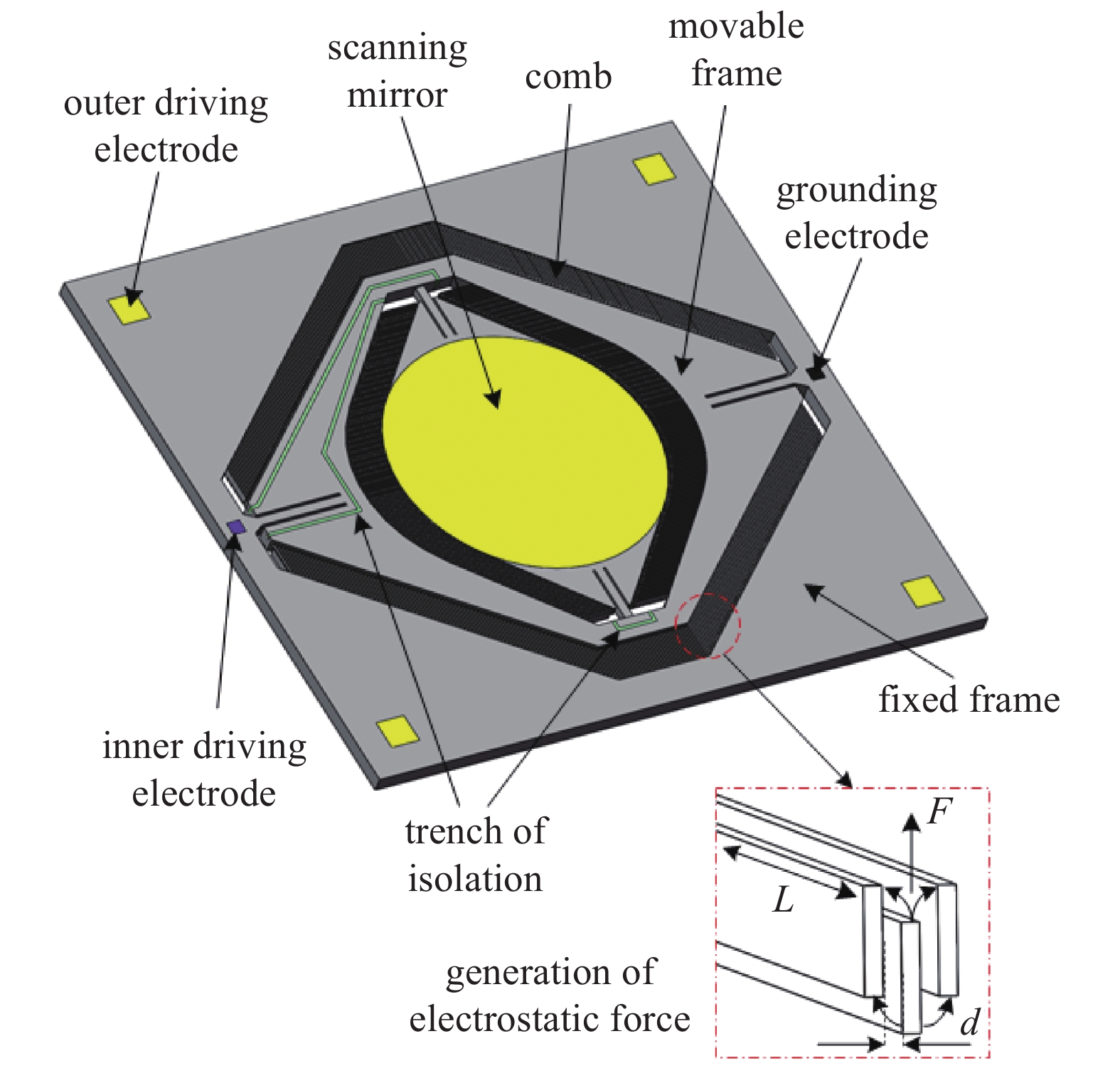
二维MEMS扫描镜的结构如图1所示,扫描镜由镜面、梳齿驱动器、快慢轴扭转梁、可动框架、固定框架及到电隔离沟道构成,其中梳齿驱动器包括内外两层梳齿驱动结构。MEMS扫描镜的工作原理是通过梳齿驱动器产生垂直方向静电力从而带动静面的发生扭转运动,进而改变入射光束的传播路径,最终实现器件扫描功能。由此可看出梳齿驱动器是该器件设计的关键,本文设计的梳齿驱动器结构如图2(a)所示,动静梳齿为交错分布且两侧的梳齿为轴对称分布。
交错型垂直梳齿驱动器的工作原理是利用梳状电容电场的边缘效应[21]。如图1所示,在静齿与动齿之间施加不同电压,使得梳齿周围产生电场,由于静齿和动齿处在不同的高度,在边缘效应的影响下,产生垂直方向的静电力驱使动齿向静齿运动,从而带动扫描镜偏转,直到静电力矩与扭转梁的回复力扭矩相等时,镜面达到稳定状态。
梳齿驱动器产生的静电力计算公式为:
式中:
$ \varepsilon $ 为介电常数,N为梳齿对数,L为动静梳齿之间的交叠长度,d为动静梳齿之间的间距,V为驱动电压。 -
经上述分析,对图2(b)中的传统梳齿分布在两侧加相同电压,则两侧梳齿产生的静电力在同一方向,大小相等,会引起扫描镜在面外垂直方向上下摇摆运动;若两侧电压不在同一相位,可以引起扫描镜的绕扭转梁偏转运动,但会使得扫描镜扭转轴偏离平衡位置。而图2(a)梳齿轴对称分布在相同条件下两侧产生的静电力大小相等、方向相反,使得扫描镜有更大偏转角,且做扭转运动不会偏离平衡位置。
图3为不同梳齿结构在相同条件下静态响应的结果,可以看出与分析结果相同,且由图3(c)可看出梳齿轴对称结构在相同条件下有更大偏转位移,且能够避免不平衡运动带来的干扰。
-
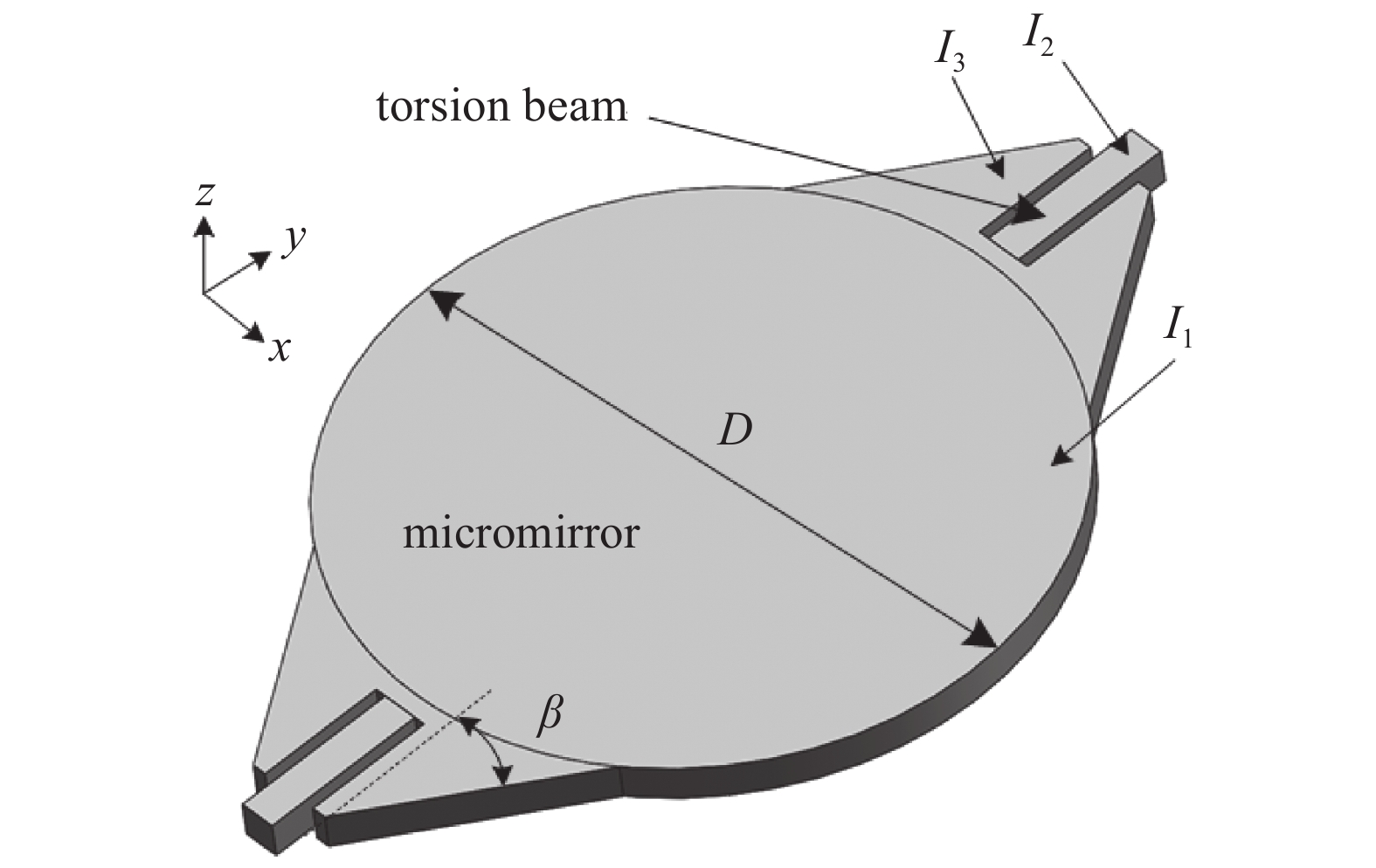
MEMS扫描镜通过隔离沟道将镜面和可动框架实现了电隔离,因此该二维扫描镜的运动状态可以分解为两个一维扫描镜绕轴做扭转运动的结合。以一维扫描镜为基础进行分析,简化模型如图4所示,图中D为镜面尺寸,
$ {I}_{1} $ 、$ {I}_{2} $ 、$ {I}_{3} $ 分别为镜面、扭转梁以及镜面和梁之间部分的转动惯量,当扫描镜受静电力的驱动绕扭转梁运动时,可看作为一质量块在驱动力矩作用下绕转轴做简谐运动,其运动过程可简单的描述为一个二阶系统的运动方程:式中:
$ I_{\mathrm{m}} $ 为转动惯量,C为阻尼系数,$ K_{\mathrm{s}} $ 为扭转刚度,$ \theta $ 为扫描镜的转动角度,$ F_{\mathrm{e}}\left(\theta\right) $ 为静电力矩。MEMS扫描镜的性能主要表现在两个方面:器件的谐振频率[22]和偏转角度。则由式(2)可知无阻尼时系统的特征频率为:
扫描镜的静电力矩为:
式中:V(t)为施加在动静梳齿之间的驱动信号电压,
$\varepsilon $ 为介电常数,d为动梳齿和静梳齿之间的间距,S(θ)为动梳齿和静梳齿之间的重叠面积。当静电力矩
$ F\mathrm{_e}\left(\theta\right) $ 等于扫描镜的回复力矩$ T\left(\theta \right) $ 时,镜面达到平衡状态,此时偏转角度θ可以表示为:式中:
$ {k}_{\varphi } $ 为扭转刚度系数,G为剪切模量,$ L_{\mathrm{f}} $ 、w、$ t_{\mathrm{h}} $ 分别为扭转梁的长、宽、厚,$\beta $ 为比例系数(矩形截面梁的长边与短边之比)。由式(5)可知偏转角度与驱动信号电压、梳齿数量、动静梳齿之间的间隙、以及梳齿之间的交叠面积对角度的微分有关。在相同长度内梳齿宽度越窄和动静梳齿间隙越小分布的梳齿数量越多,从而静电力越大;但是从工艺方面考虑梳齿宽度过窄,会使加工难度和成本增加,同时梳齿间隙不能持续减小,否则在高度闭合的梳状物中将导致较大的瞬态电流并燃烧造成器件的损坏。所以本研究采用梳齿宽度为5 μm,动静梳齿之间的间隙为5 μm,梳齿长度为250 μm。
-
由式(1)可知动静梳齿交叠长度越长静电力越大,所以梳齿交叠长度L设为230 μm。由式(4)可知静电力矩与动静梳齿之间的重叠面积变化率有关,考虑加工工艺等因素动静梳齿的重叠高度设为38 μm。
由于扭转梁的结构参数对扫描镜的性能起着决定性的作用,因此对快轴扭转梁的结构参数进行了研究;扭转梁的结构参数变化对扫描镜的特征频率和偏转位移均有影响,考虑不同宽度和厚度时所对应的特征频率和偏转位移,其结果如图5和图6所示,可以看出器件的特征频率随梁的宽度和厚度增大而变大,同时器件的偏转位移随之减小。综合考虑器件的特征频率和偏转位移等因素,扭转梁的宽度、厚度和长度分别为60 μm、60 μm和400 μm。
图7为快轴扭转梁两侧倾斜梳齿分布和扭转梁的夹角β对扫描镜的特征频率和偏转角度的影响,可知随着夹角β增大,镜面的特征频率变化表现出先增大后减小的趋势,直至夹角β增大到与镜面相切,而静面偏转位移量随夹角β增大基本呈现线性增大趋势;分析式(3)可知器件的特征频率与扭转梁的弹性常数
$ K\mathrm{_s} $ 成正比,与器件的转动惯量$ I_{\mathrm{m}} $ 成反比,而$ I_{\mathrm{m}} $ 近似等于$ {I}_{1}+{I}_{2}+{I}_{3} $ ,同时夹角β的变化并不会影响弹性常数$ K_{\mathrm{s}} $ 、转动惯量$ {I}_{1} $ 和$ {I}_{2} $ ,因此只有转动惯量$ {I}_{3} $ 的变化会对器件的特征频率产生影响,经过定性分析计算可知$ {I}_{3} $ 先减小后增大,与仿真结果符合;由于特征频率变化幅度相对较小,夹角β最大为两者相切。而对于慢轴扭转梁设计考虑加工工艺,由于梳齿轴对称分布的结构,慢轴扭转梁的厚度设为104 μm,对于其长度和宽度设计主要考虑器件的各阶特征频率应相差较大,使其工作时不会产生交叉干扰;优化慢轴扭转梁的结构参数,其结果如图8所示,选取慢轴扭转梁长度和宽度分别为600 μm、60 μm。具体结构参数如表1所示。
-
模态是振动系统的固有特性,一般包括频率、振型和阻尼三个因素,模态分析主要用于计算结构的特征频率和振动形态。无阻尼状态下MEMS扫描镜的模态分析如图9所示,表2为扫描镜的各阶模态的特征频率;图9(a)是一阶模态为镜面和可动框架绕慢轴做扭转运动,图9(b)是二阶模态为镜面绕快轴做扭转运动,图9(c)是三阶模态为镜面和可动框架做垂直面外的摇摆运动,图9(d)是四阶模态为镜面和可动框架做面内的摇摆运动;从表2中可以看出扫描镜的各阶模态的特征频率相差较大,MEMS扫描镜在工作时不会产生交叉干扰。
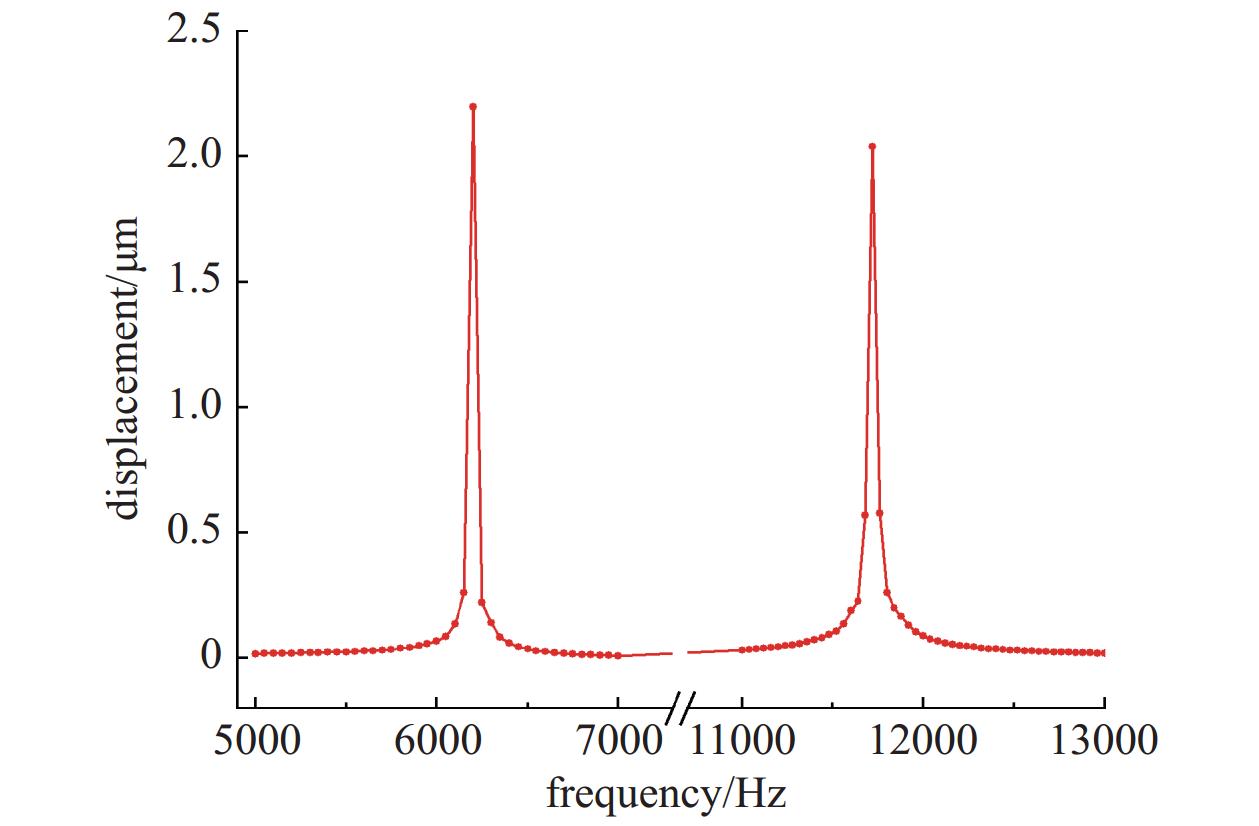
谐响应分析主要用于确定结构在承受随时间按正弦规律变化的载荷时的稳态响应,谐响应分析的目的是计算出结构在一系列频率下的响应值(例如位移)对频率的曲线,从而预测结构的持续性动力特性,验证器件结构能否克服共振及其他受迫振动引起的有害效果[23]。因此需要对MEMS扫描镜做谐响应分析以避免器件工作时产生上述危害,对扫描镜施加驱动电压的频率分别取5~7 kHz和11~13 kHz的频率范围,取样间隔分别为50 Hz和20 Hz,分析结果如图10所示,慢轴和快轴的谐振频率分别约为6.2 kHz 和11.7 kHz,结果显示与扫描镜的一阶模态和二阶模态接近,因此该器件有良好的抗干扰能力。
-
图11为快轴施加12 V的驱动电压时扫描镜的应力分布云图,应力主要集中在快轴的扭转梁上,最大应力约为1.19 GPa,当电压增加到13 V时,最大应力约为1.40 GPa;图12为慢轴施加16 V的驱动电压时应力分布云图,应力集中在外轴扭转梁上,最大应力约为1.13 GPa,当电压增加到17 V时,最大应力约为1.27 GPa;然而硅的最大许用应力为1.80 GPa,典型的最大应力应小于许用应力的三分之二[24],因此MEMS扫描镜的快轴驱动电压设为12 V、慢轴驱动电压设为16 V。
-
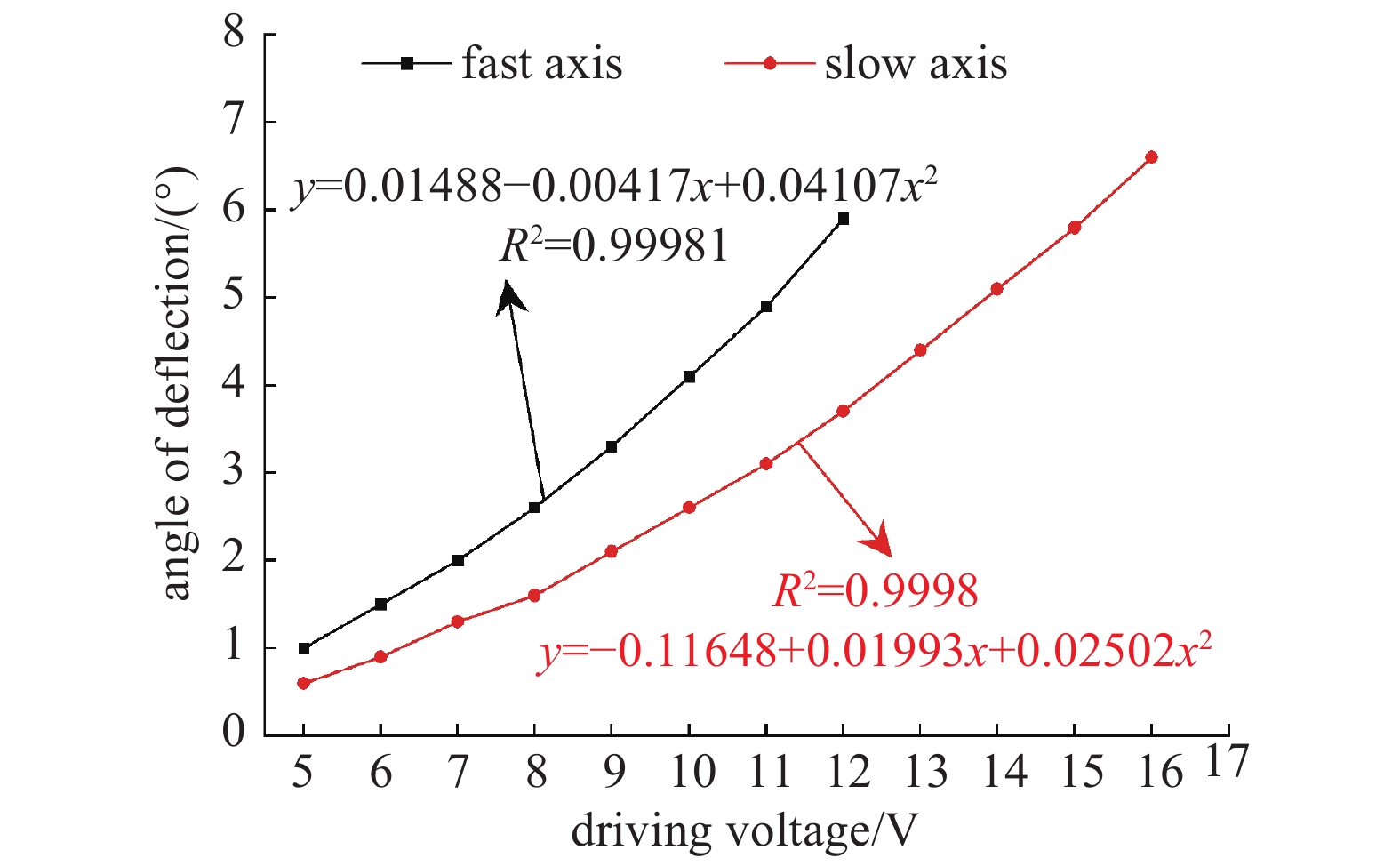
图13为MEMS扫描镜在不同驱动电压下的最大机械偏转角度,即器件在谐振频率下的结果。从图中可以看出最大偏转角度与驱动电压近似成二次函数关系,与式(5)相近。为防止镜面偏转角度过大使得器件损坏,快轴在驱动电压为12 V时镜面的偏转角度为5.9°,慢轴在16 V的驱动电压下镜面和可动框架的偏转角度为6.6°。
为了进一步说明本文设计的扫描镜的性能,与现有论文中成果以及市面上产品进行了对比,如表3所示,可以看出梳齿轴对称结构驱动的扫描镜具有较高的谐振频率同时较低的驱动电压,能够满足激光雷达等高性能场合的应用需求。
-
MEMS扫描镜采用SOI晶圆制作,包括器件层、埋氧层和基底,本文设计了一套适用于该器件的制作工艺,具体工艺流程如图14所示。
(1) 隔离沟道刻蚀:首先采用缓冲氢氟酸溶液清洗硅片,去除表面自然氧化层;然后在器件层正面利用各向异性电感耦合等离子体刻蚀(Inductively Coupled Plasma:ICP)和各向同性干法刻蚀技术刻蚀出具有坡度的沟槽,如图14(a);
(2) 隔离沟道填充:首先采用湿法氧化工艺在沟道两侧形成二氧化硅,随后填充多晶硅,最后去除表面多余的多晶硅和二氧化硅层,如图14(b);
(3) 刻蚀减薄:由于两侧静梳齿处在不同高度,因此在器件层一侧做刻蚀减薄处理,刻蚀深度22 μm,如图14(c);
(4) 金属层沉积和图案化:在正面沉积二氧化硅绝缘层,随后采用干法刻蚀工艺刻蚀出器件层表面需要引出电信号区域;最后正面沉积金属层,然后采用干法刻蚀工艺刻蚀出镜面的反射涂层和驱动电极,如图14(d);
(5) 正面刻蚀:先进行一次刻蚀,刻蚀漏出一侧静梳齿和另一侧动梳齿,刻蚀深度22 μm;然后再做一次刻蚀,刻蚀形成镜面、梁和梳齿的部分结构,刻蚀深度38 μm,如图14(e);
(6) 背腔刻蚀:首先在背面沉积二氧化硅层作为深刻蚀的掩膜,随后采用ICP刻蚀基底层至埋氧层,最后去除埋氧层,形成背腔,如图14(f);
(7) 背面刻蚀:先进行一次光刻,刻蚀深度22 μm;然后做一次刻蚀刻,完成器件结构的释放,刻蚀深度38 μm,如图14(g)。
-
本文基于MEMS技术设计了一种梳齿轴对称分布结构的静电驱动二维MEMS扫描镜,结合理论建模和仿真分析对扫描镜的结构参数进行了设计和优化。确定结构参数后,通过COMSOL软件对扫描镜进行仿真分析,分析结果如下:由模态分析可知扫描镜快轴和慢轴的谐振频率分别为11657 Hz和6211.4 Hz,谐振频率较高且各阶模态频率相差较大,经过谐响应分析可以确定器件在工作时具有优良的工作稳定性且抗干扰能力强;在12 V和16 V的正弦电压驱动下,扫描镜快轴和慢轴对应的机械扫描角分别为5.9°和6.6°;最后设计了一套适用于该扫描镜的制备工艺,为下一步扫描镜制备提供了理论基础。从结果可以看出本文设计的扫描镜具有一定的性能优势,有望应用在激光雷达系统当中,具有广阔的市场前景。
高谐振频率梳齿轴对称结构的MEMS扫描镜
MEMS Scanning Mirror with High Resonant Frequency Comb Axisymmetric Structure
-
摘要: 针对静电驱动MEMS扫描镜存在谐振频率低、驱动电压较高等缺点,提出了一种具有高谐振频率、低驱动电压的二维MEMS扫描镜。该扫描镜采用轴对称分布的交错型垂直梳齿结构,通过对该器件进行了理论分析,建立了理论模型;利用COMSOL仿真软件对扫描镜做静态和动态的分析验证,结果表明梳齿轴对称结构在偏转时能提供更大的驱动力矩,同时避免传统梳齿的不平衡运动带来的干扰;扫描镜在12 V和16 V的正弦波电压驱动下,快轴和慢轴的谐振频率分别为11657 Hz、6211.4 Hz,相对应的机械偏转角为5.9°、6.6°;此外,扫描镜的两轴谐振频率相差较大,能够有效抑制两种运动状态的相互干扰。最后设计一套适用于该器件的制备工艺。Abstract: Aiming to address the drawbacks of electrostatic-driven MEMS scanning mirrors, such as low resonant frequency and high driving voltage, a novel two-dimensional MEMS scanning mirror with improved resonant frequency and reduced driving voltage is proposed. The scanning mirror adopts an interleaved vertical comb structure with axisymmetric distribution. Through the theoretical analysis of the device, the theoretical model is established. COMSOL simulation software is employed for static and dynamic analysis to verify the performance of the scanning mirror. The results demonstrate that the comb axisymmetric structure can provide greater driving torque during deflection, while avoiding the interference caused by the unbalanced motion of the traditional comb. Under the sine wave voltage of 12 V and 16 V, the resonant frequencies of the fast axis and the slow axis are 11657 Hz and 6211.4 Hz, respectively, and the corresponding mechanical deflection angles are 5.9° and 6.6°. Furthermore, a significant disparity between the resonant frequencies of both axes effectively suppresses mutual interference between their respective motion states. Finally, a set of fabrication processes suitable for this device has been designed.
-

-
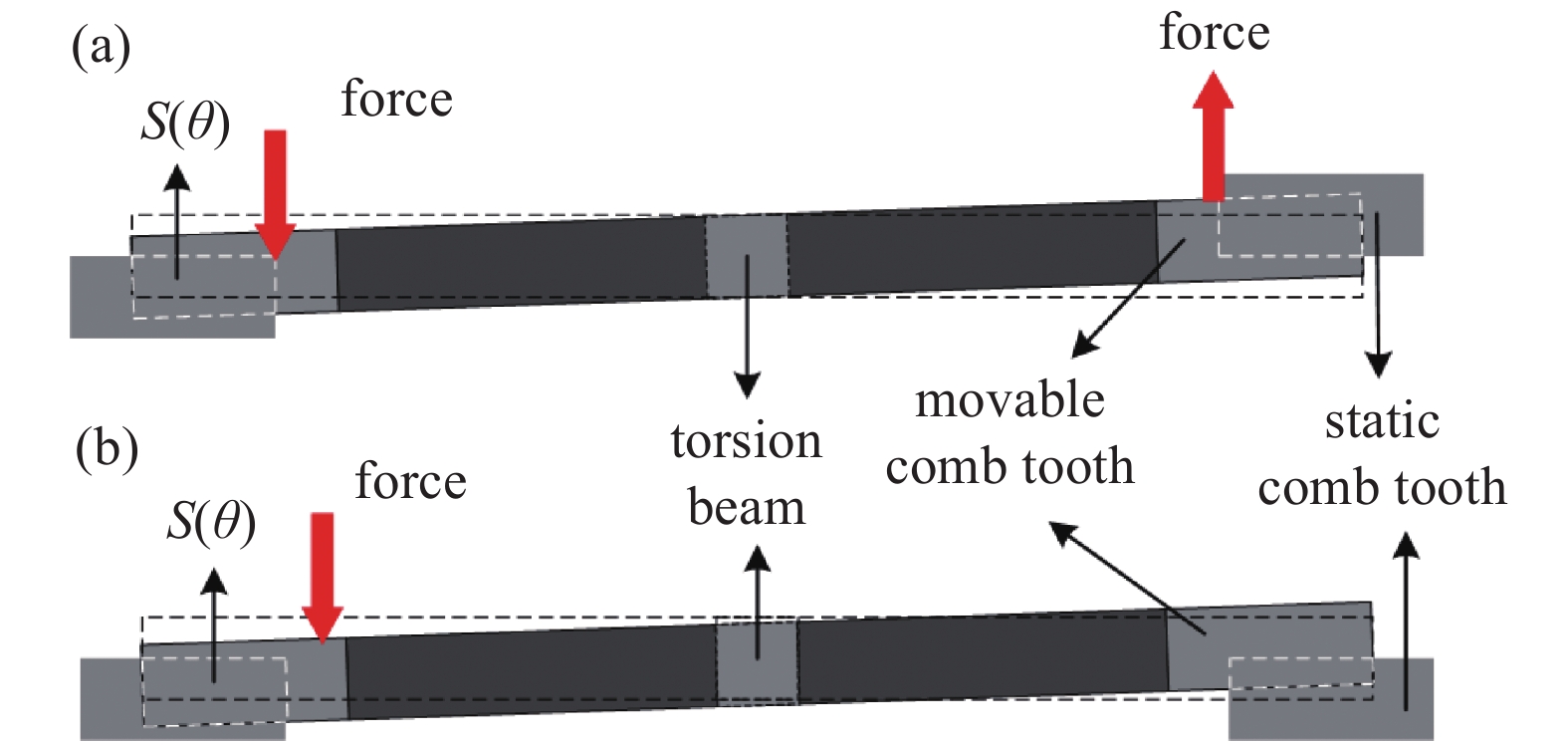
图 2 两种梳齿结构示意图。(a)梳齿轴对称,(b)传统梳齿
Figure 2. Schematic diagram of the two comb tooth structures. (a) Comb tooth axisymmetric,(b) traditional comb tooth
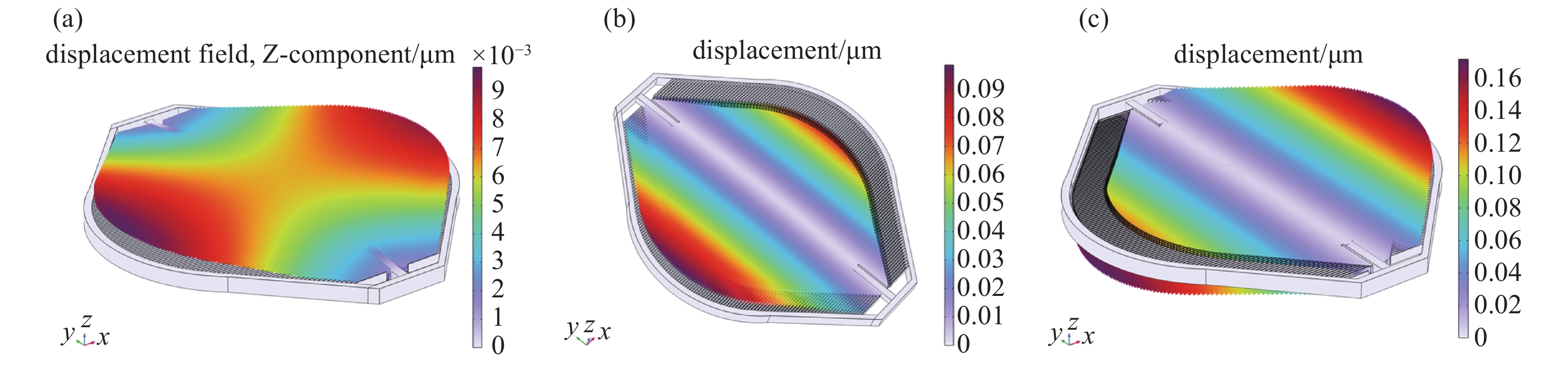
图 3 不同梳齿结构在相同情况下的偏转位移。(a)两侧梳齿加相同电压(传统结构), (b) 一侧梳齿加电压(传统结构), (c) 两侧梳齿加相同电压(轴对称结构)
Figure 3. Deflection displacement of different comb tooth structures in the same situation. (a) Same voltage applied to both comb teeth (traditional structure), (b) voltage applied to one comb (traditional structure), (c) same voltage applied to both comb teeth (axisymmetric structure)
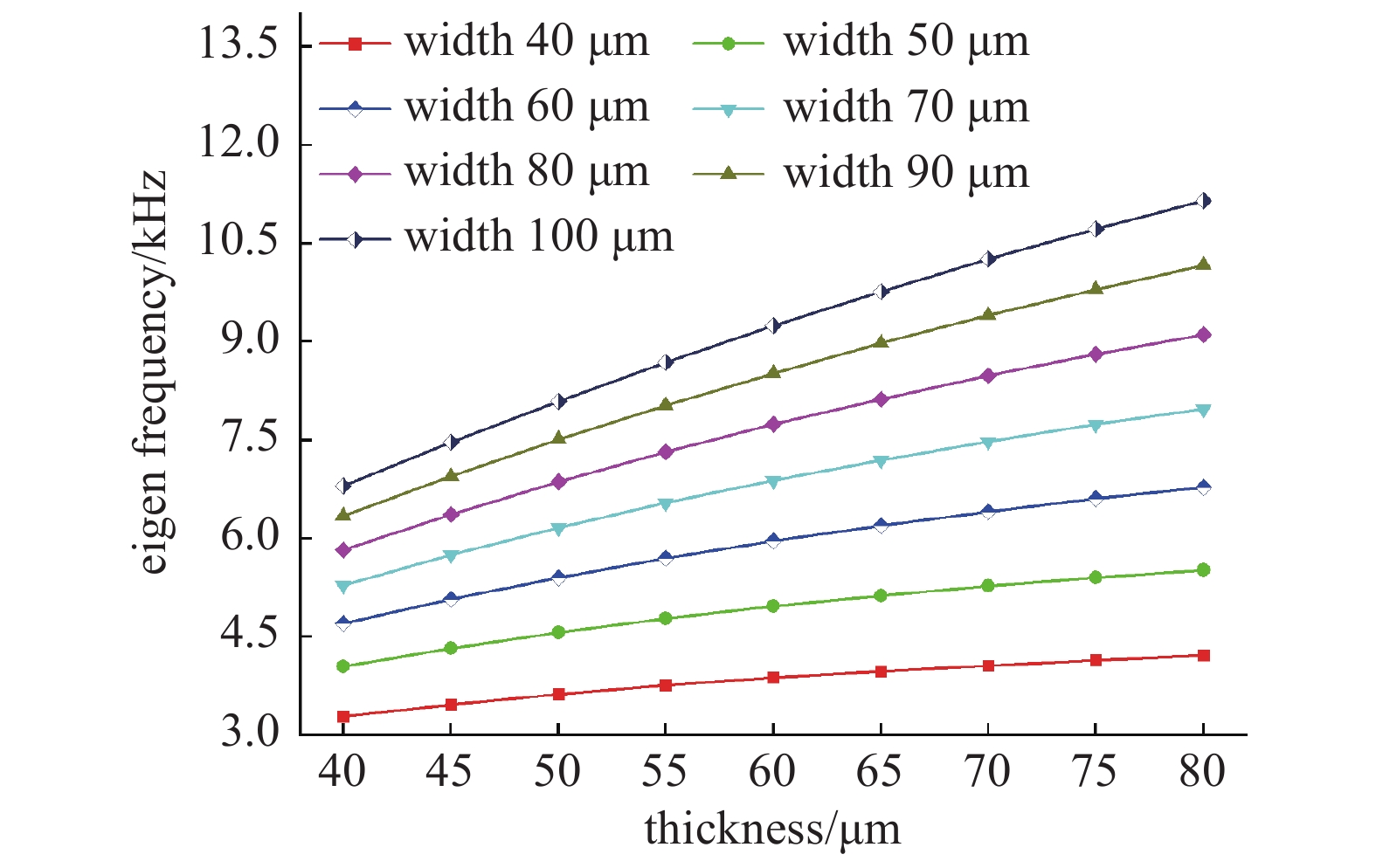
图 5 快轴扭转梁不同宽度和厚度对应特征频率
Figure 5. Different widths and thicknesses of fast axis torsional beams correspond to eigen frequencies
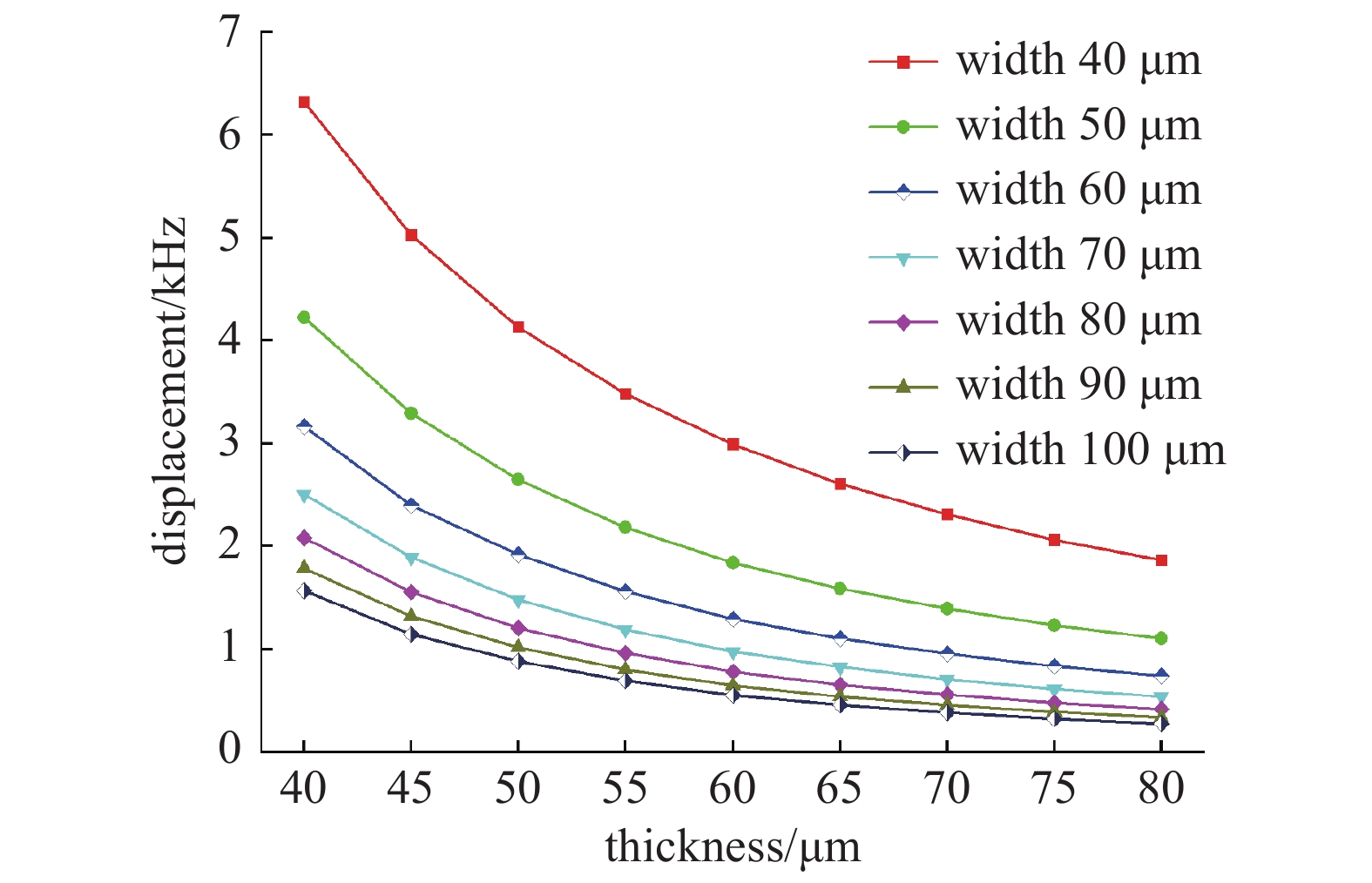
图 6 快轴扭转梁不同宽度和厚度对应的最大偏转位移
Figure 6. Maximum deflection displacement corresponding to different widths and thicknesses of the fast axis torsional beam
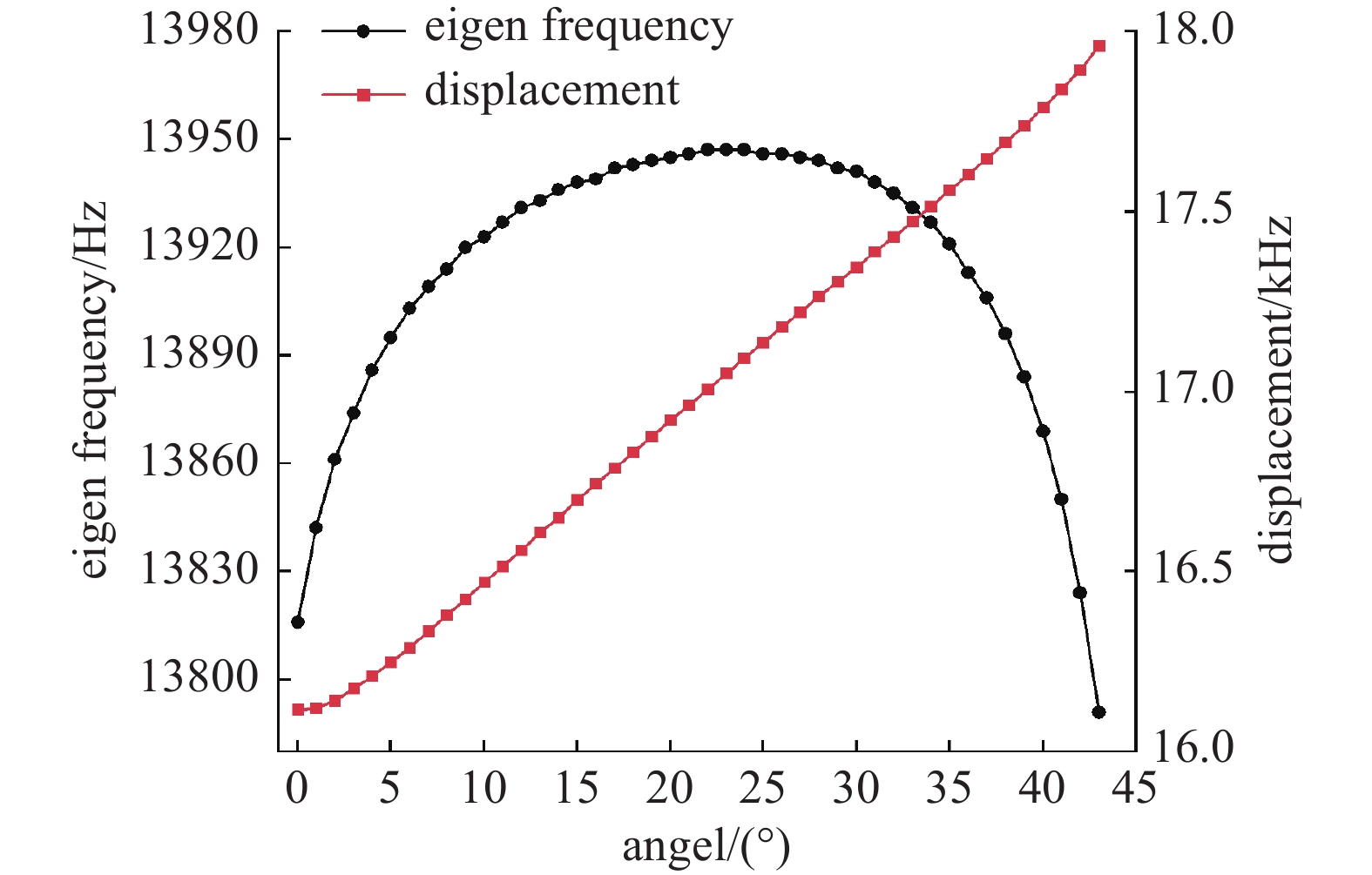
图 7 夹角β对应扫描镜的偏转位移和特征频率
Figure 7. The Angle β corresponds to the deflection displacement and characteristic frequency of the scanning mirror
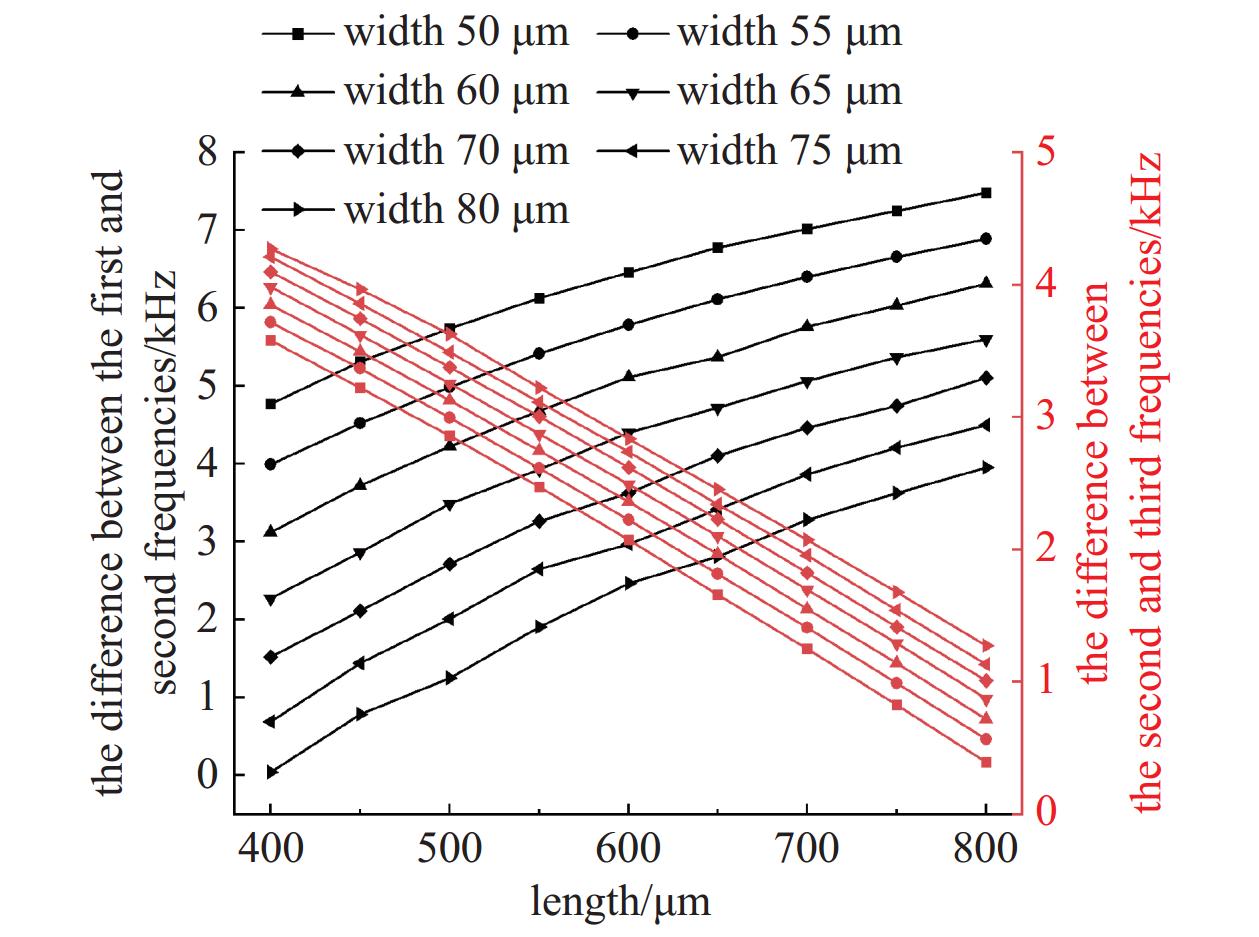
图 8 慢轴扭转梁不同长度和宽度的各阶特征频率之差
Figure 8. Eigen frequencies for different lengths and widths of slow-axis torsional beams
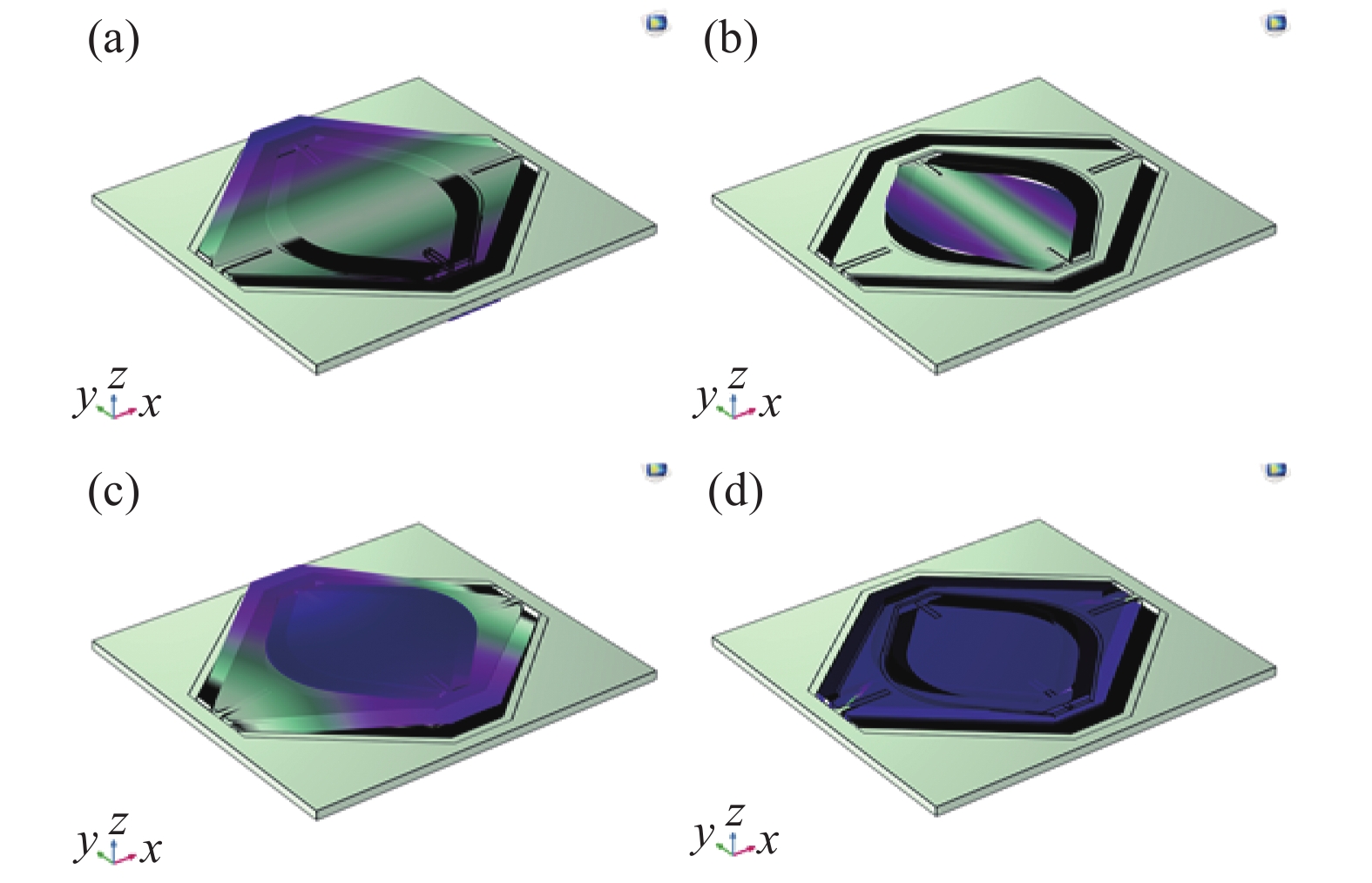
图 9 器件的模态分析,(a)一阶模态,(b)二阶模态,(c)三阶模态,(d)四阶模态
Figure 9. Modal analysis of devices. (a) First-order mode, (b) second-order mode, (c) third-order mode, and (d) fourth-order mode
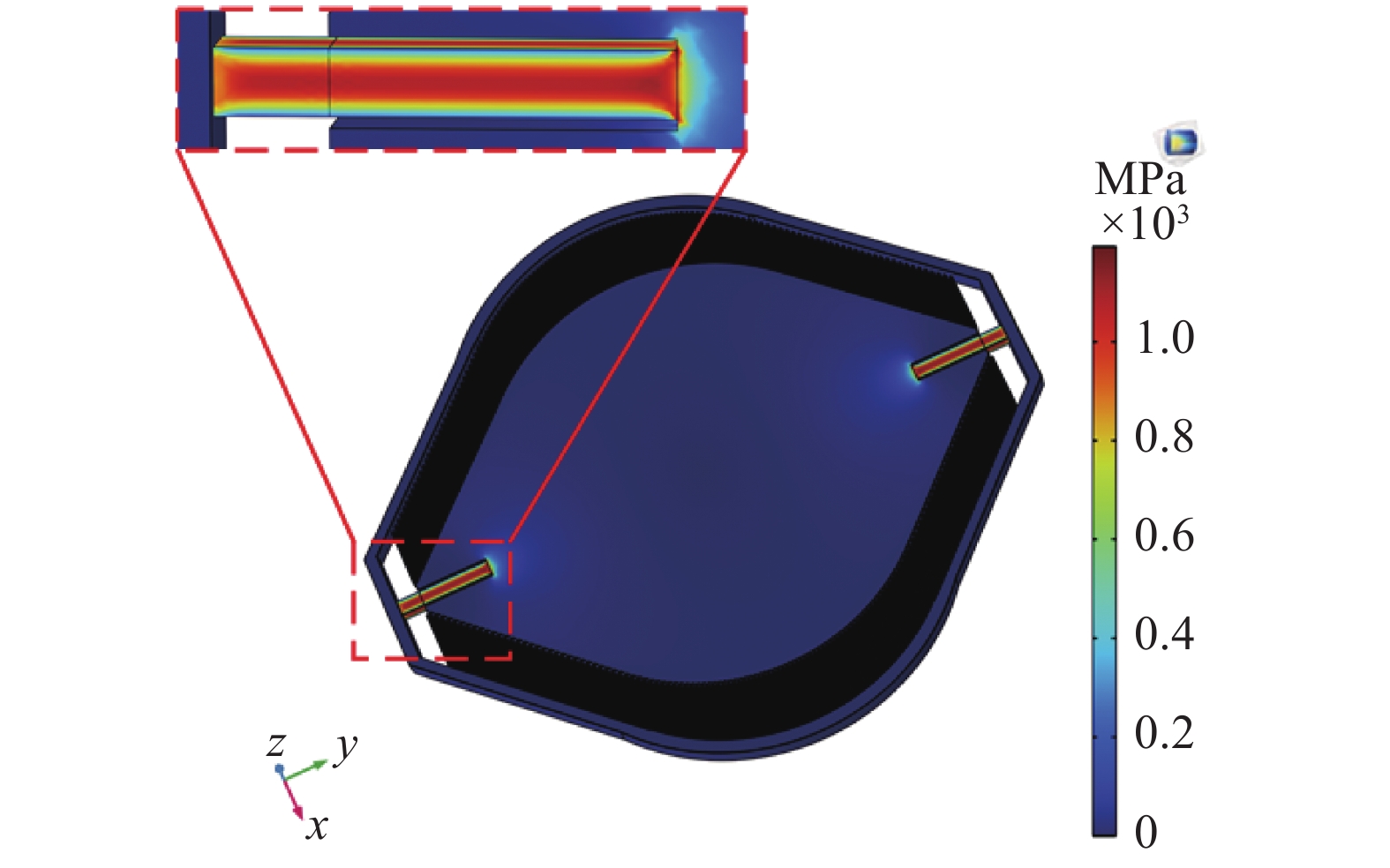
图 11 快轴施加驱动信号为12 V时应力分布图
Figure 11. Stress distribution diagram when the fast axis applied driving signal is 12 V
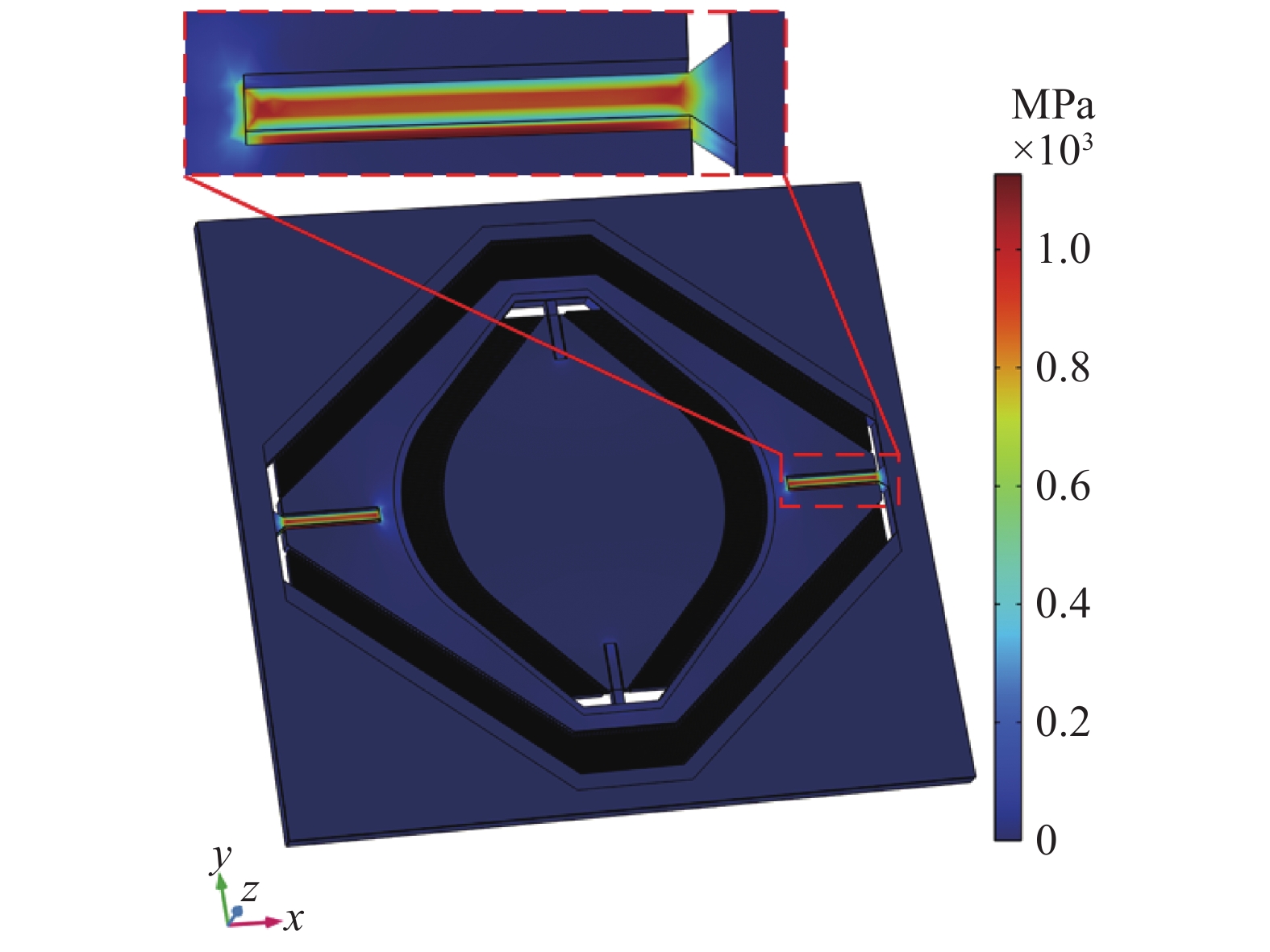
图 12 慢轴施加驱动信号为16 V时应力分布图
Figure 12. Stress distribution diagram when the driving signal applied to the slow axis is 16 V
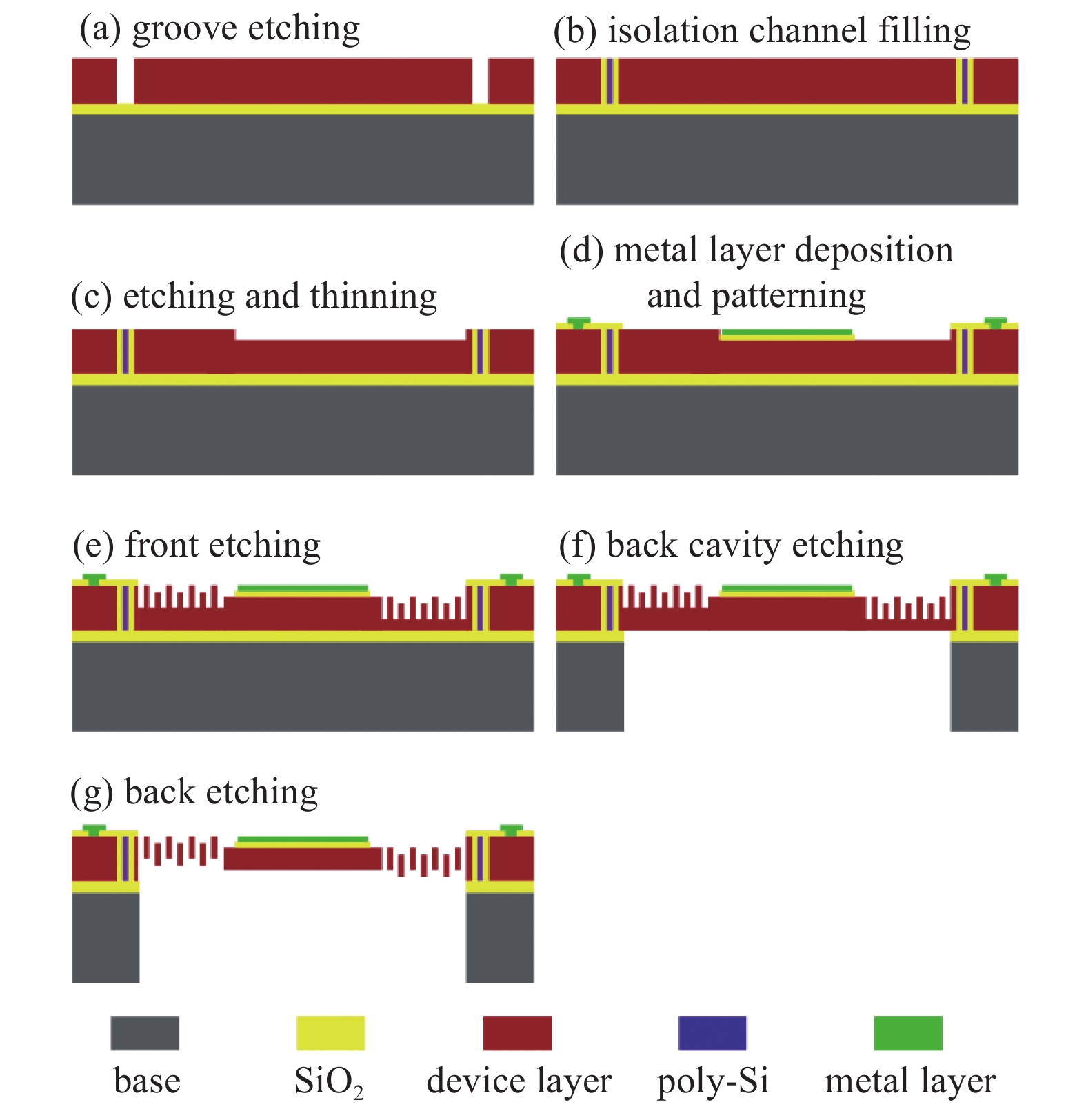
图 14 扫描镜的制备工艺流程图。(a)沟道刻蚀,(b)隔离沟道填充,(c)刻蚀减薄,(d)金属层沉积和图案化,(e)正面刻蚀,(f)背腔刻蚀,(g)背面刻蚀
Figure 14. The fabrication process flow chart of the scanning mirror. (a) Groove etching, (b) isolation channel filling, (c) etching and thinning, (d) metal layer deposition and patterning, (e) front etching, (f) back cavity etching, (g) back etching
表 1 MEMS扫描镜的尺寸
Table 1. Dimensions of MEMS scanning mirrors
参数 规格/μm 扫描镜尺寸 1800 扫描镜厚度 60 快轴长 400 快轴宽 60 慢轴长 600 慢轴宽 60 慢轴厚 104  下载: 导出CSV
下载: 导出CSV
-
[1] 王强. 静电梳齿驱动MEMS扫描镜研究[D]. 中国科学院大学(中国科学院光电技术研究所), 2021 (in Chinese) Wang Q. Study on MEMS scanner based on electrostatic comb drive actuator[D]. University of Chinese Academy of Sciences (Institute of Optoelectronic Technology, Chinese Academy of Sciences), 2021 [2] Chen S, Zhang Y, Hong X, et al. Technologies and applications of silicon-based micro-optical electromechanical systems: A brief review[J]. Journal of Semiconductors, 2022, 43(8): 081301 doi: 10.1088/1674-4926/43/8/081301 [3] 杜林云, 许高斌, 花翔, 等. 用于激光雷达的双层梳齿驱动MEMS扫描镜[J]. 电子测量与仪器学报, 2021, 35(5): 8−15 (in Chinese) Du L Y, XU G B, HUA X, et al. MEMS scanning mirror driven by double comb teeth for lidar[J]. Journal of Electronic Measurement and Instrument, 2021, 35(5): 8−15 [4] Chen C D, Lee Y H, Yeh C S. Design and vibration analysis of a piezoelectric-actuated MEMS scanning mirror and its application to laser projection[J]. Smart Materials and Structures, 2014, 23(12): 125007 doi: 10.1088/0964-1726/23/12/125007 [5] Wang D, Watkins C, Xie H. MEMS Mirrors for LiDAR: A review[J]. Micromachines (Basel), 2020, 11(5): 456 doi: 10.3390/mi11050456 [6] Liu Y, Xu J, Zhong S, et al. Variable optical attenuator based on a vertical comb drive actuated MEMS micromirror[J]. Optik, 2013, 124(20): 4100−4103 doi: 10.1016/j.ijleo.2012.12.033 [7] Pengwang E, Rabenorosoa K, Rakotondrabe M, et al. Scanning micromirror platform based on MEMS technology for medical application[J]. Micromachines (Basel), 2016, 7(2): 24 doi: 10.3390/mi7020024 [8] 乔大勇, 苑伟政, 任勇. MEMS激光雷达综述[J/OL]. 微电子学与计算机, 2023(01): 41−49 (in Chinese) Qiao D Y, Yuan W Z, Ren Y. Review of MEMS lidar [J/OL]. Microelectronics & Computer, 2023(01): 41−49 [9] Chen L, Gu W. Improvement and optimization of electromagnetic integrated scanning micromirror[J]. Micromachines (Basel), 2021, 12(10): 1213 doi: 10.3390/mi12101213 [10] 何嘉辉, 周鹏, 余晖俊, 等. 电磁驱动大尺寸MEMS扫描镜的研究[J]. 光子学报, 2017, 46(1): 21−28 (in Chinese) He J H, Zhou P, Yu H J, et al. Research on large size MEMS scanning mirror driven by electromagnetic[J]. Acta Photonica Sinica, 2017, 46(1): 21−28 [11] Lei H, Wen Q, Yu F, et al. AlN film based piezoelectric large-aperture MEMS scanning micromirror integrated with angle sensors[J]. Journal of Micromechanics and Microengineering, 2018, 28(11): 115012 doi: 10.1088/1361-6439/aae051 [12] Dinesh Ram G, Praveen Kumar S, Srinivasan T K, et al. Analysis of piezoelectric based MEMS micromirror for optical communication [C]. 2022 3rd International Conference on Smart Electronics and Communication (ICOSEC). 2022: 1-4 [13] Tang Y, Li J, Xu L, et al. Review of electrothermal micromirrors[J]. Micromachines, 2022, 13(3): 429 doi: 10.3390/mi13030429 [14] 保慧琴, 卫霞, 李茹. V型MEMS电热执行器技术研究[J]. 电子测量技术, 2021, 44(3): 45−49 (in Chinese) Bao H Q, Wei X, Li R. Research on V-beam MEMS electro-thermal actuator technology[J]. Electronic Measurement Technology, 2021, 44(3): 45−49 [15] Frangi A, Guerrieri A, Boni N, et al. Mode coupling and parametric resonance in electrostatically actuated micromirrors[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5962−5969 doi: 10.1109/TIE.2017.2774729 [16] Sadhukhan D, Singh G P. Study of electrostatic actuated MEMS biaxial scanning micro-mirror with comb structure [C]. International Conference on Multifunctional Materials (Icmm-2019). 2020, 2269(1) [17] 刘耀波, 苑伟政, 乔大勇, 等. 一种新型静电驱动二维微型扫描镜的设计及模态[J]. 光学学报, 2013, 33(6): 299−304 (in Chinese) Liu Y B, Yuan W Z, Qiao D Y, et al. Design and modes of a novel two-dimensional microscanner with electrostatic actuation[J]. Acta Optica Sinica, 2013, 33(6): 299−304 [18] Moon S, Lee J, Yun J, et al. Two-Axis electrostatic gimbaled mirror scanner with self-aligned tilted stationary combs[J]. IEEE Photonics Technology Letters, 2016, 28(5): 557−560 doi: 10.1109/LPT.2015.2513483 [19] 单亚蒙, 任丽江, 沈文江. 应用于激光雷达的二维静电微镜设计[J]. 传感器与微系统, 2021, 40(2): 65−68+72 (in Chinese) Shan Y M, Ren L J, Shen W J. Study on 2D electrostatic-driven micro scanning mirror applied to LiDAR[J]. Sensor and Microsystem, 2021, 40(2): 65−68+72 [20] Farrugia R, Portelli B, Grech I, et al. Design and fabrication of high performance resonant micro-mirrors using the standard SOIMUMPs process[C]. 2020 Symposium on Design, Test, Integration & Packaging of MEMS and MOEMS (DTIP), Lyon, France, 2020: 1−6 [21] 张晓磊, 徐永青, 杜妙璇. 光MEMS芯片驱动结构自对准技术[J]. 微纳电子技术, 2018, 55(5): 366−370 (in Chinese) Zhang X L, Xu Y Q, Du M X. Self-aligned technique for the driving structure of optical MEMS chips[J]. Micro and Nano Electronics Technology, 2018, 55(5): 366−370 [22] Urey H, Kan C, Davis W O. Vibration mode frequency formulae for micromechanical scanners[J]. Journal of Micromechanics and Microengineering, 2005, 15(9): 1713−1721 doi: 10.1088/0960-1317/15/9/013 [23] 付罗均, 彭岚, 吴龙. 谐响应分析在设备减振中的应用[J]. 中国特种设备安全, 2022, 38(6): 20−25 (in Chinese) Fu L J, Peng L, Wu L. Application of harmonic response analysis in equipment vibration reduction[J]. China Special Equipment Safety, 2022, 38(6): 20−25 [24] Qiao D, Zhao R, Zhang Y, et al. An exploration for the degradation behavior of 2-D electrostatic microscanners by accelerated lifetime test[J]. Microelectronics Reliability, 2018, 80: 284−293 doi: 10.1016/j.microrel.2017.07.062 [25] Aunion Tech Co., Ltd. A5M24.2-2400AL [DB/OL]. 2023.12. https:/www.auniontech.com/details-793.html -
计量
- 文章访问数: 346
- HTML全文浏览数: 346
- PDF下载数: 1
- 施引文献: 0