
 首页
首页 登录
登录 注册
注册



-
磁悬浮分子泵具有高抽气特性、体积小、高清洁等诸多优点,在半导体真空获得设备、工业镀膜、核能及航空航天等领域有广泛的应用[1-6]。然而磁悬浮分子泵位移波动大、振动大的问题一直是制约其发展的瓶颈之一。磁悬浮分子泵结构紧凑,定、转子之间装配间隙非常小,因此当磁悬浮分子泵的径向位移波动较大时,产生的剧烈振动,不仅影响了产品运行的稳定性,减少磁悬浮分子泵的使用寿命,而且极有可能造成磁悬浮分子泵的毁灭性破坏。针对磁悬浮分子泵转子径向位移波动的抑制问题,国内外学者进行了相关的研究,提出了以现代控制理论为基础的控制方法[7-13],从控制的角度抑制陀螺效应引起的刚体章动,从而实现抑制磁悬浮分子泵径向位移波动的目的。还有学者提出提高磁悬浮分子泵转子的一阶弯曲频率[14],以提高该挠性转子的稳定性;针对大转动惯量转子给出了其刚体模态的相对稳定性判断方法[15]等等。通过磁悬浮分子泵转子的结构变化来抑制其径向位移波动的方法还未见报道。
综上,本文以一台1.5 kW,27720 r/min磁悬浮涡轮分子泵为研究对象,首先提出一种基于改变磁悬浮分子泵转子结构抑制其径向位移波动的方法,对磁悬浮分子泵转子径向位移波动机理进行分析,确定磁悬浮分子泵转子径向位移波动频率与转子轴向长度变化之间的解析关系,最后通过与研制样机在全转速范围内径向位移波动试验对比分析,验证了此方法的准确性,此方法可有效抑制磁悬浮分子泵转子径向位移波动,对高转速磁悬浮分子泵的设计具有一定的理论价值与工程参考意义。
-
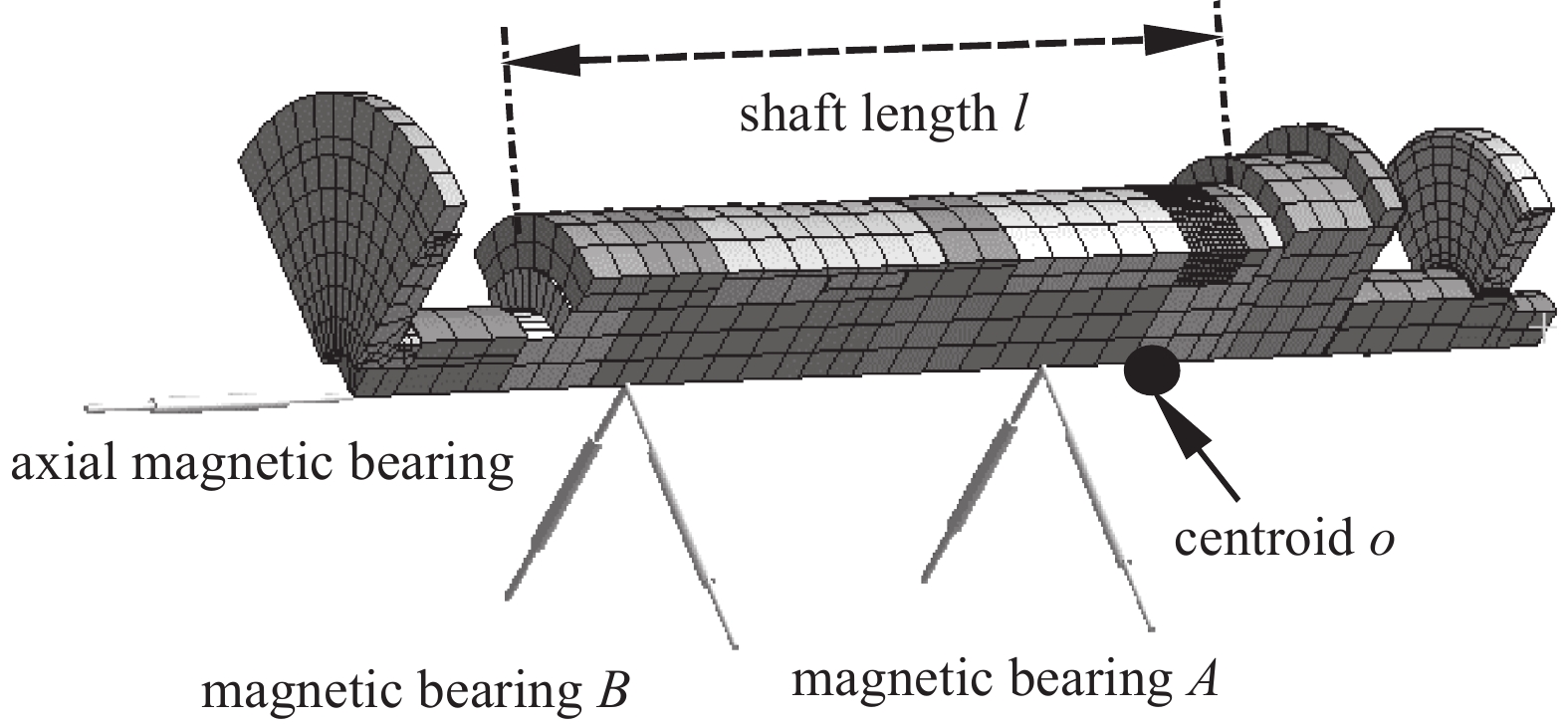
为了描述涡轮转子与磁轴承之间的位置关系,图1给出磁悬浮分子泵的转子与磁轴承关系结构简图,表1给出磁悬浮分子泵的主要参数。以磁悬浮分子泵转子的质心o为原点,建立空间直角坐标系,磁轴承A、B距离转子质心的距离分别为
$ {L}_{a} $ 、$ {L}_{b} $ ,转子所受由A、B端径向磁悬浮轴承提供的沿x方向与y方向的电磁支承力分别为$ {F}_{ax} $ 、$ {F}_{bx} $ 和$ {F}_{ay} $ 、$ {F}_{by} $ 。用于限制转子沿x方向与y方向的平动及转动,转子轴向所受力及负载与轴向磁轴承提供的支承力互相平衡,最终实现悬浮和运转。由于磁悬浮分子泵转子叶片众多,为了简化计算分析过程,可将叶片模态和转子模态分析分开进行计算,在对整个转子进行模态及临界转速分析时,可将叶轮简化成质量块的形式添加到转子结构中,质量块模型与真实叶轮具有相同的重心及转动惯量参数,与真实的转子具有相同的动力学特性,边界条件包括:将磁悬浮轴承均等效成弹簧阻尼单元,进行挠性支承计算,不进行固定约束;整个模型添加转速;打开陀螺效应。磁悬浮分子泵转子主轴直径为d,主轴长度为l,简化后的计算模型如图2所示。
-
磁悬浮分子泵根据转子动力学建立转子−轴承−系统的数学模型如式(1)所示,
式(1)中,M为质量矩阵,J为陀螺力矩有关的矩阵,K为刚度矩阵,R为外力矩阵,Ω为转动角速度,其中
$ {\boldsymbol{X}=\left\{{x}_{1},{\theta }_{x1},{y}_{1},{\theta }_{y1},\cdots,{x}_{n},{\theta }_{xn},{y}_{n},{\theta }_{yn},{{\textit{z}}}_{n},{\theta }_{{\textit{z}}n}\right\}}^{T} $ 为各质量块广义位移矩阵。进一步地,为了计算磁悬浮分子泵的临界转速,以质心o的坐标x、y和转角$ {\theta }_{x} $ 、$ {\theta }_{y} $ 表示转子在运动过程中任意瞬时的位置。可得到磁悬浮分子泵转子的四个微分方程如式(2)所示,式(2)中m为转子质量,
$ {J}_{P} $ 为极转动惯量,Ω为转动角速度,$ {J}_{d} $ 为直径转动惯量,$ {k}_{11} $ 为转子叶轮质心o在x方向有单位位移时所需加于o点而沿x方向的力,$ {k}_{22} $ 为转子叶轮质心o在y方向有单位位移时所需加于o点而沿y方向的力,$ {k}_{33} $ 为转子绕ox轴有单位转角时需对ox轴的力矩,$ {k}_{44} $ 为转子绕oy轴有单位转角时需对oy轴的力矩,$ {k}_{14} $ 为转子绕oy轴有单位转角时所需加于o点而沿x方向的力,$ {k}_{23} $ 为转子绕ox轴有单位转角时所需加于o点而沿y方向的力,$ {k}_{32} $ 为转子质心o在y方向有单位位移时所需对ox轴的力矩,$ {k}_{41} $ 为转子质心o在x方向有单位位移时所需对oy轴的力矩。当磁悬浮分子泵转子质心旋转一个角度θ时,可得到转子质心处位移与磁悬浮轴承处位移的关系为式(3)。式(2)与式(3)联立即可建立磁悬浮分子泵转子平动与转动的四自由度传递函数。
-
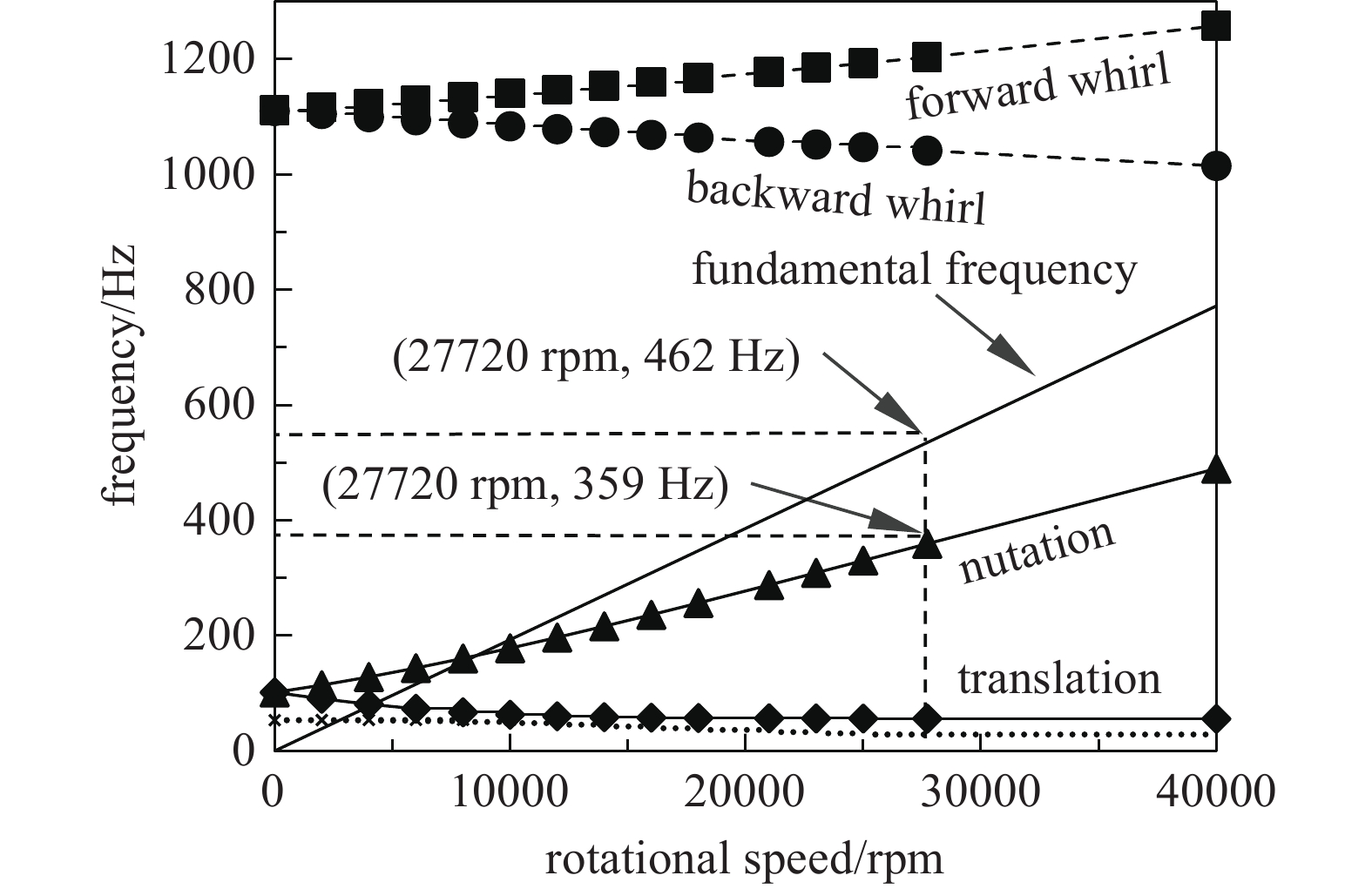
磁悬浮分子泵转子有复杂的动力学特征,包括叶轮叶片振动、转子弯曲振动及刚体振动等等。就转子结构设计而言,为了避免其超越临界转速运行,即保证转子是刚性转子,转子的一阶弯曲频率需远离转子工作频率,以上文图2的计算模型为基础计算得到转子的坎贝尔图如图3所示,为了进行网格无关性验证,本文分别对7 mm、12 mm及20 mm的网格单元进行计算,额定转速下章动频率分别为359.5 Hz、363 Hz及368.5 Hz,可见计算结果与网格大小无关。公式(4)给出了整个磁悬浮分子泵转子涡动频率计算方法,其中
$ {\omega }_{r1} $ 、$ {\omega }_{r2} $ 分别为转子的正向涡动和反向涡动,$ {k}_{\varphi } $ 为磁悬浮轴承的支承刚度。由图3和公式(4)可知,在额定转速范围内,整个磁悬浮分子泵转子整体呈现平动和章动,一阶弯曲频率发生在1092 Hz,随着转速的增加,弯曲模态中,正向涡动频率随转速升高而增加,反向涡动频率随转速升高而减小。一阶弯曲频率远高于额定转速频率,磁悬浮分子泵转子为刚性转子。然而,二阶刚体正向涡动(即刚体章动)频率随转速升高而显著增加,刚体反向涡动(刚体进动)频率趋近于0,当转速升高至27720 r/min时,刚体正向涡动频率为359.5 Hz,此频率非常接近转子额定转速频率462 Hz,此时磁悬浮分子泵转子径向位移波动明显,转子刚体章动频率是导致转子径向位移波动的主要因素。
磁悬浮分子泵转子极转动惯量与直径转动惯量的比值较大,转子在高转速下陀螺效应明显,考虑到转子叶轮是整个转子转动惯量的主要贡献单元,为了进一步分析叶轮影响整个转子章动频率升高的灵敏度,本文分别计算叶轮极转动惯量和直径转动惯量对整个转子章动频率的影响如图4、图5所示,叶轮极转动惯量增加会提高整个转子的章动频率,叶轮直径转动惯量增加会减小整个转子的章动频率,故选择较小转动惯量比(极转动惯量与直径转动惯量的比值)的叶轮可有效减小转子的章动频率,但具有小转动惯量比的叶轮会限制磁悬浮分子泵的抽气性能,为了不影响磁悬浮分子泵的抽气性能,通过减小叶轮的转动惯量比的方式抑制整个转子的章动频率显得几无可能。
-
为了有效抑制章动频率对转子径向位移波动的影响,本文通过改变主轴长度l及其所在主轴直径d两个结构对抑制转子章动频率的敏感性进行分析,图6给出了转子主轴长度l变化对转子章动频率的影响关系。
由图6可知增加主轴长度可以抑制整个磁悬浮分子泵转子的章动频率,且抑制效果可达到80 Hz以上,磁悬浮分子泵转子的章动频率对转子长度变化较为敏感。但是增加主轴长度会降低一阶弯曲模态反向涡动频率,图7给出增加主轴长度对一阶弯曲模态反向涡动频率的影响关系,可见,随着主轴长度的增加,一阶弯曲反方向涡动频率会逐渐减小,使其无限接近磁悬浮分子泵转子工作转速频率(462 Hz),激发整个转子的弯曲变形。综上,增加主轴长度60 mm可有效抑制整个转子的章动频率80 Hz,此时一阶反向涡动频率896 Hz,依然远离磁悬浮分子泵转子工作转速频率,不会激发整个转子弯曲变形。
上文验证了增加主轴长度可有效的抑制整个转子的章动频率,为了进一步分析主轴伸长量∆l所在轴段直径d的变化对整个转子章动频率及弯曲频率的影响关系,取主轴伸长量∆l=60 mm(即主轴长度为184 mm),直径d变化范围在30 mm~90 mm之间,图8、图9分别给出了直径d的变化对章动频率和弯曲频率的影响关系,可知章动频率受直径d的变化的影响的敏感性较低,变化范围小于15 Hz,直径d变化对章动频率几乎无影响。但是主轴直径d的增加会有效提高整个转子的一阶弯曲频率,随着直径d的增加,弯曲频率有效的远离工作转速频率,远离趋势先增加后平稳不变。故增加转子长度及直径,可有效抑制章动频率和提高弯曲频率。
综上,根据主轴长度和直径对抑制章动频率的敏感性分析结果可知,抑制章动频率只与主轴长度有关而与主轴直径无关。结合上文图6主轴长度l对转子章动频率的影响关系,进行二项式拟合并求导,可求得章动频率值
$ \mathrm{\delta } $ 与主轴长度l之间的微分方程如公式(5)所示,其中$ \mathrm{\delta } $ 为章动频率,l为主轴的长度。进一步地由公式(4)可知,随着转子转速的升高,涡动频率只与转子的转动惯量比(极转动惯量与直径转动惯量的比值)及转速有关,类似地可探讨转动惯量比和转速对章动的影响规律。因此,在相同转动惯量比时,分别计算了27720 r/min、23000r/min、21000 r/min、18000 r/min及16000 r/min工况下,主轴长度对章动频率的影响如图10所示,可见不同转速下,主轴长度对章动频率的影响呈现为开口向上的抛物线束,图11给出相同主轴长度,不同转速对抑制章动频率变化量的影响关系,可见,转速越高抑制章动频率量越高,即不同转速下,章动频率变化率
$ \dot{\delta } $ 与转速成正比关系。进一步地,结合公式(5)与图11可求得相同转动惯量比时,任意转速下主轴长度对抑制章动频率的微分方程如公式(6)所示,其中
$ \dot{{\delta }_{p}} $ 为任意转速下的章动频率变化率,$ p $ 为任意转速,单位为r/min。为了验证公式(6)的正确性,当磁悬浮分子泵转速为25000 r/min时,本文进行了公式(6)解析计算与仿真计算的对比分析如图12所示,可见解析计算结果与仿真计算基本吻合,误差小于5 Hz,公式(6)正确。
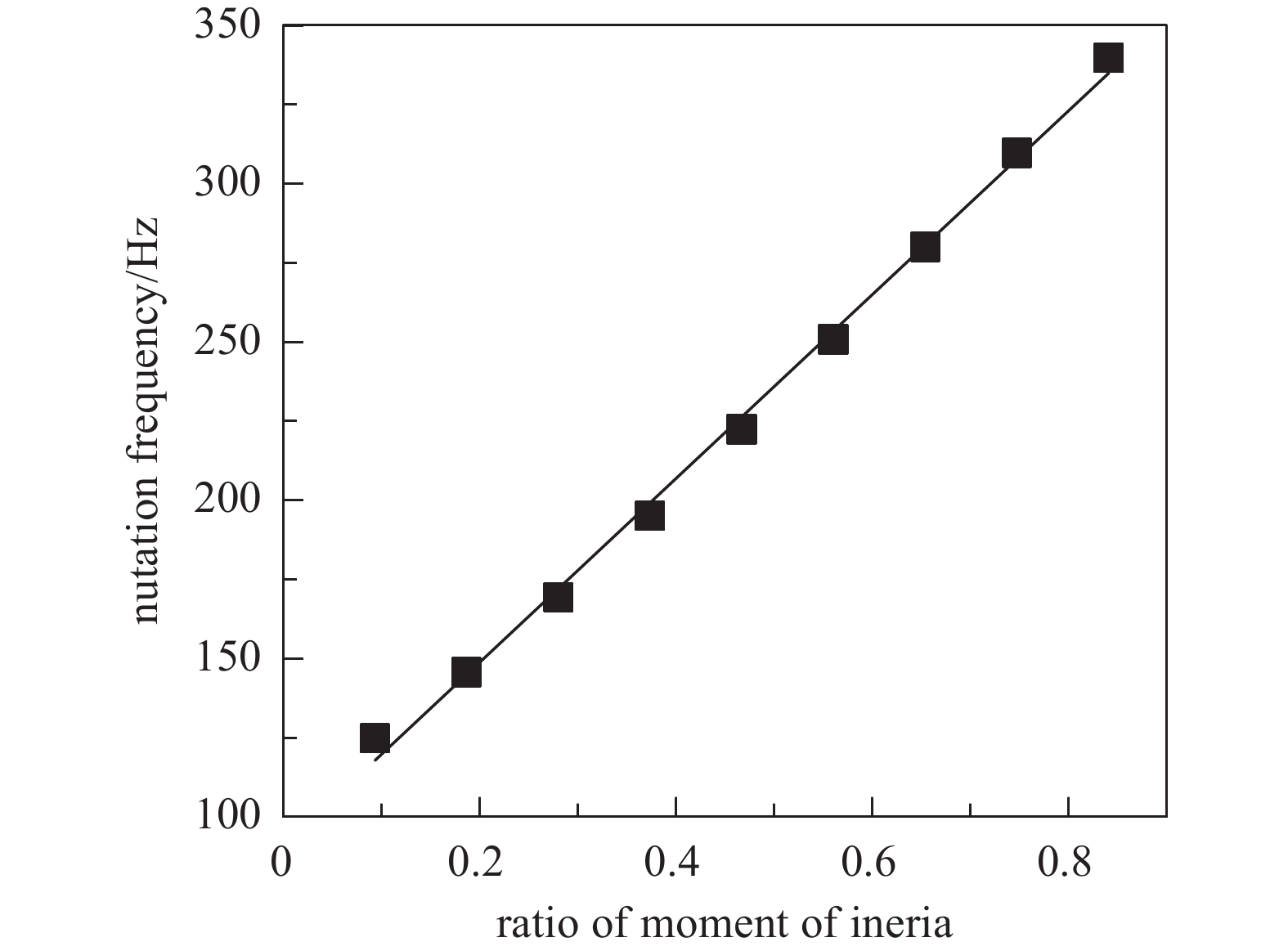
上文给出了相同转动惯量比,任意转速下章动频率与主轴长度的解析关系,为了分析转动惯量比对章动频率的影响,本文计算了不同转动惯量比与章动频率的关系如图13所示,可见,转动惯量比越大,章动频率越大,即转动惯量比与章动频率
$ \mathrm{\delta } $ 成正比关系。磁悬浮分子泵均采用本文案例所示的扁平转子结构,结合上文的分析结论,可推导出任意转动惯量比、任意转速工况下,主轴长度对抑制章动频率的数学解析关系如公式(7)所示,其中
$ \dot{{\delta }_{pn}} $ 为任意转动惯量比、任意转速的章动频率变化率,n为转动惯量比。为了验证公式(7)具有通用性,以转子转动惯量比为0.69的磁悬浮分子泵为计算对象进行验证,具体参数如表2所示。图14给出仿真计算与公式(7)解析计算结果对比,可见公式(7)解析计算结果与仿真计算结果两者基本吻合,两者误差平均小于5 Hz,验证了公式(7)的准确性及通用性。
-
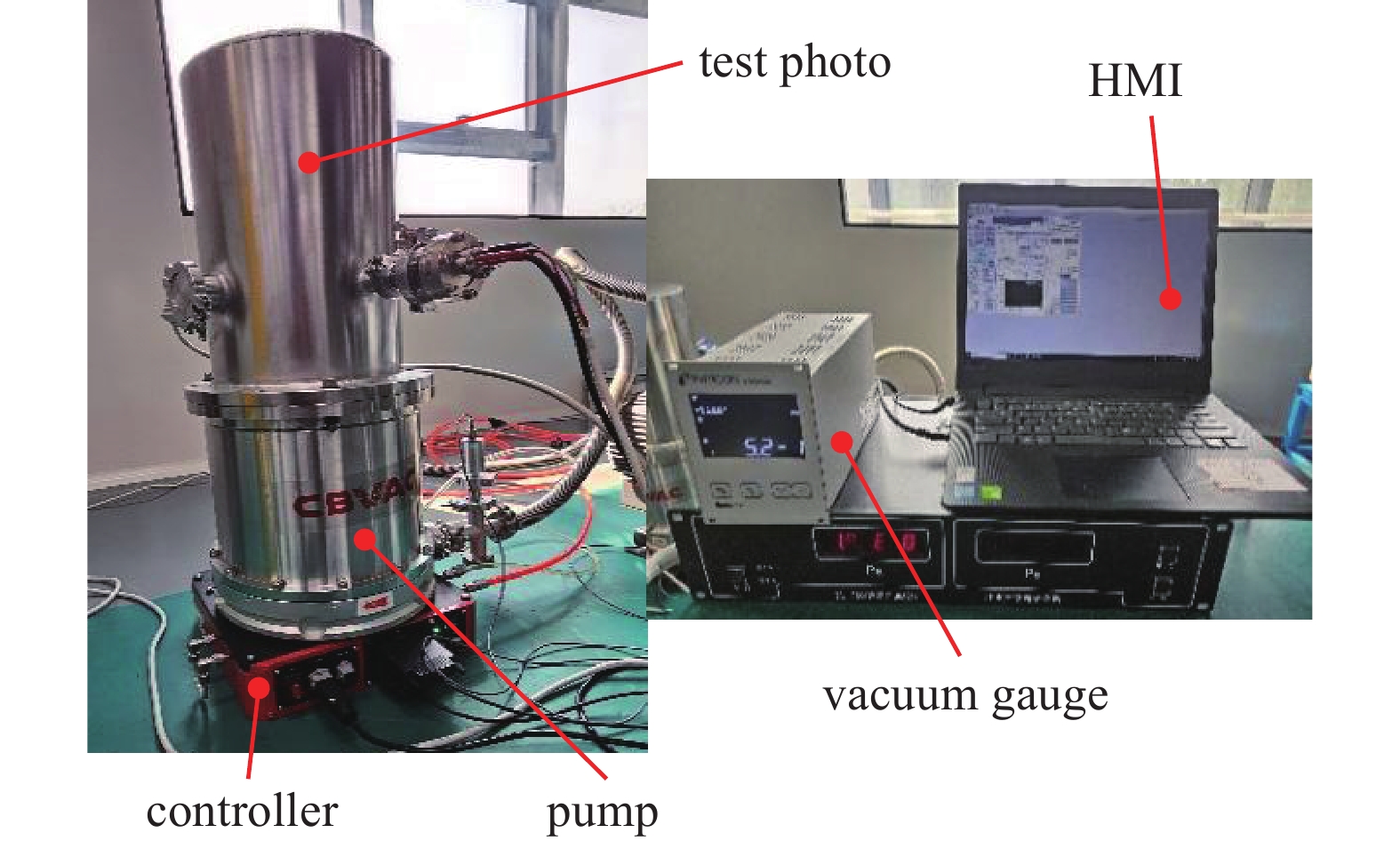
为了验证上文中抑制磁悬浮分子泵转子章动频率方法的正确性及仿真计算的准确性,搭建了磁悬浮分子泵试验平台。磁悬浮分子泵试验平台如图15所示。试验平台由磁悬浮分子泵(参数见表1)、测试罩、真空计、上位机及其他真空辅助设备组成。其中测试罩模拟真空腔体,采用英福康全量程真空规(BPG400,精度15%),抽速30000 L/s的干泵机组(Edwards_iXH1820H)作为磁悬浮分子泵的前级泵,控制器与磁悬浮分子泵为一体式。先启动前级泵,待腔体压力小于10 Pa时,启动磁悬浮分子泵。
工作时,磁悬浮分子泵中的电涡流式非接触位移传感器(ECDS-4-1,精度0.12 μm)检测磁悬浮轴承A、B端位移波动,即传感器可直接检测到转子位移振动,并将位移信号传输至控制器中,经过控制器系统的实时计算,将合适的控制信号传输至功率放大器,再由功率放大器输出合适的控制电流,最终使得磁悬浮轴承产生旋转的电磁力,实现闭环控制。
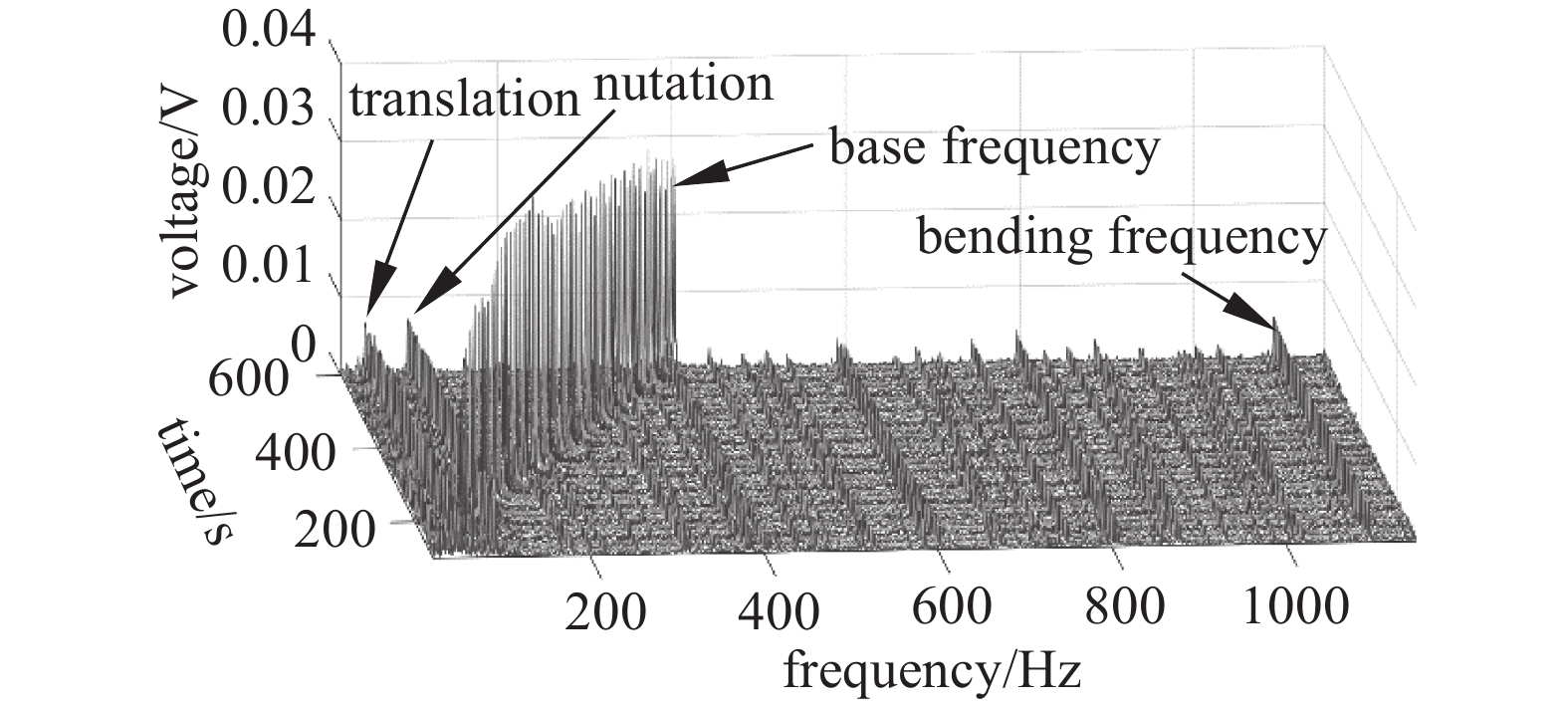
在磁悬浮分子泵升速的过程中,在47 Hz、97 Hz处有明显的振幅,经过信息采集卡(SMACQ,精度4.8 mV)的数据采集,绘制出了磁悬浮分子泵全转速范围内的振动瀑布图如图16所示,图中刚体平动频率和章动频率及弯曲频率均有较高的振幅,与升速过程中位移波动表现一致。表3给出了磁悬浮涡轮分子泵(参数见表1)刚体平动、章动频率与弯曲频率的试验值与计算值(见图3)的数据对比。结果表明两者误差小于5%,验证了计算结果的正确性及抑制章动频率方法的准确性。
-
(1)本文利用有限元法准确计算了磁悬浮分子泵的刚体振动频率及一阶弯曲频率,刚体章动频率的增加是磁悬浮涡轮分子泵径向位移波动大的主要因素。
(2)针对抑制章动频率,本文给出了增加磁悬浮分子泵主轴长度来抑制章动频率的方法,并给出抑制章动频率量与主轴长度增加量之间的解析关系式。此方法可有效抑制转子章动频率量80 Hz以上。
(3)本文所提出的方法可推广应用于转子具有较大转动惯量比的磁悬浮分子泵,为产品的稳定可靠运行提供了有效的解决方案,本文的研究成果对相关产品的设计具有较大的指导意义和参考价值。
磁悬浮分子泵转子径向位移波动抑制机理的研究
The Mechanism of Suppressing Radial Displacement Fluctuations in Magnetic Levitation Molecular Pumps
-
摘要: 针对高转速下磁悬浮分子泵径向位移波动量大极易失稳的问题,提出一种基于磁悬浮分子泵转子结构抑制其径向位移波动的方法。以一台1.5 kW,27720 r/min高速磁悬浮分子泵为例,建立三维计算模型,利用有限元法对转子刚体模态、弯曲模态、临界转速以及挠性支承进行耦合求解,确定转子径向位移波动频率与转速间的变化规律,在此基础上,对磁悬浮分子泵转子结构变化对其径向位移波动的影响进行分析研究,揭示影响磁悬浮分子泵转子径向位移波动的机理,确定磁悬浮分子泵转子径向位移波动频率与转子轴向长度之间的解析关系,通过与研制样机在全转速范围内径向位移波动试验对比分析,验证了仿真计算的准确性。此方法可抑制磁悬浮分子泵转子位移波动频率量在80 Hz以上,为高速磁悬浮分子泵设计提供参考。Abstract: To address the issue of significant radial displacement fluctuations and instability of magnetic levitation molecular pumps at high rotational speeds, a method based on the rotor structure of the magnetic levitation molecular pump to suppress its radial displacement fluctuations is proposed. Taking a 1.5 kW, 27720 r/min high-speed magnetic levitation molecular pump as an example, a three-dimensional computational model is established. The finite volume method is used to solve the rotor rigid mode, bending mode, critical speed, and flexible support, determining the analytical relationship between the rotor radial displacement fluctuation frequency and the rotational speed. On this basis, the influence of changes in the magnetic levitation molecular pump rotor structure on its radial displacement fluctuations is analyzed and studied, revealing the mechanism affecting the radial displacement fluctuations of the magnetic levitation molecular pump rotor. The relationship between the frequency of radial displacement fluctuations and the axial length of the rotor is determined. Through comparative analysis of the radial displacement fluctuation tests of the developed prototype over the full speed range, the accuracy of the simulation calculations is verified. This method can suppress the radial displacement fluctuation frequency of the magnetic levitation molecular pump rotor above 80 Hz, providing a reference for the design of high-speed magnetic levitation molecular pumps.
-
Key words:
- Magnetic levitation molecular pump /
- Vibration /
- Radial displacement fluctuation /
- Finite element .
-

-
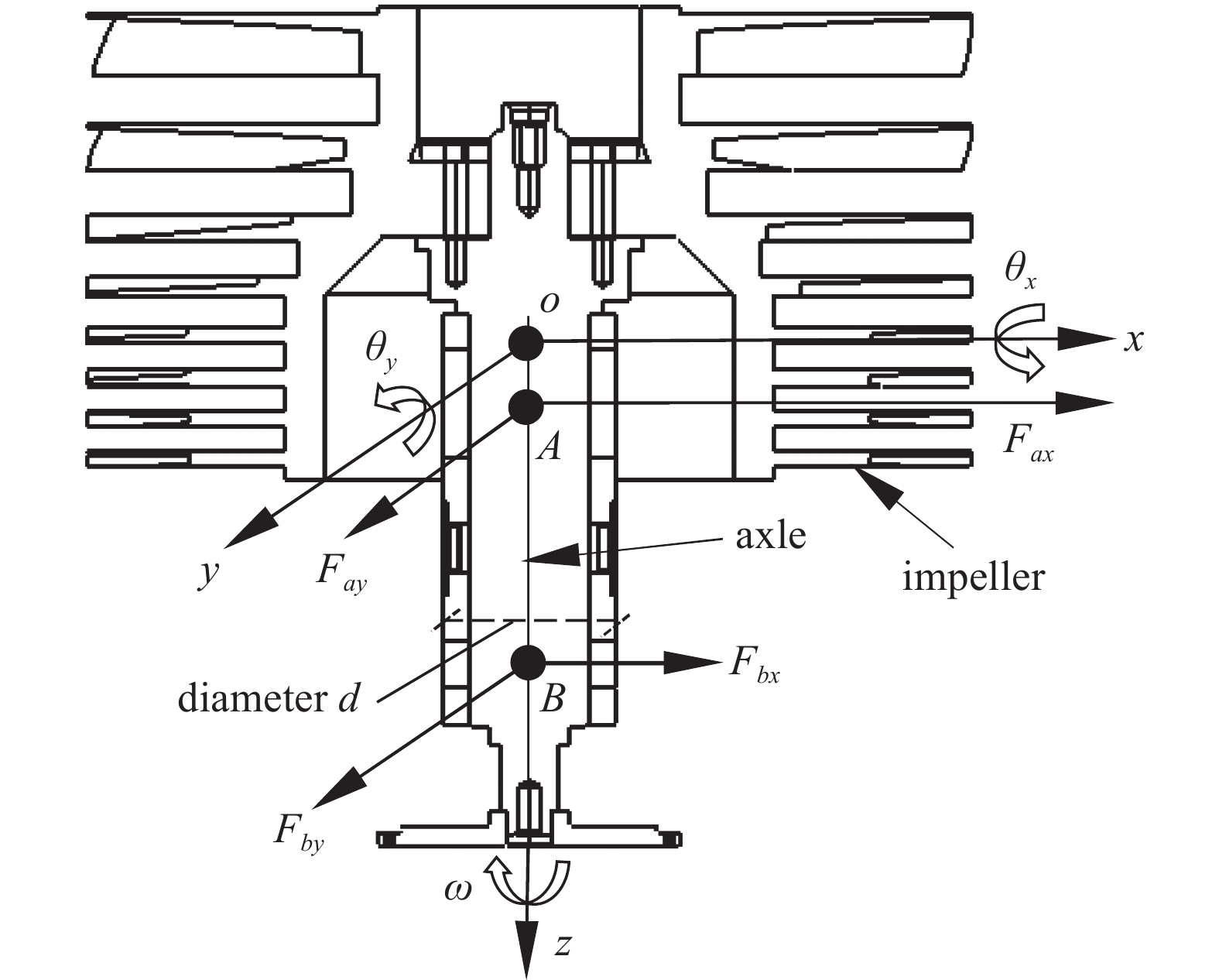
图 1 磁悬浮分子泵转子及坐标系模型
Figure 1. Magnetic levitation molecular pump rotor and coordinate system model
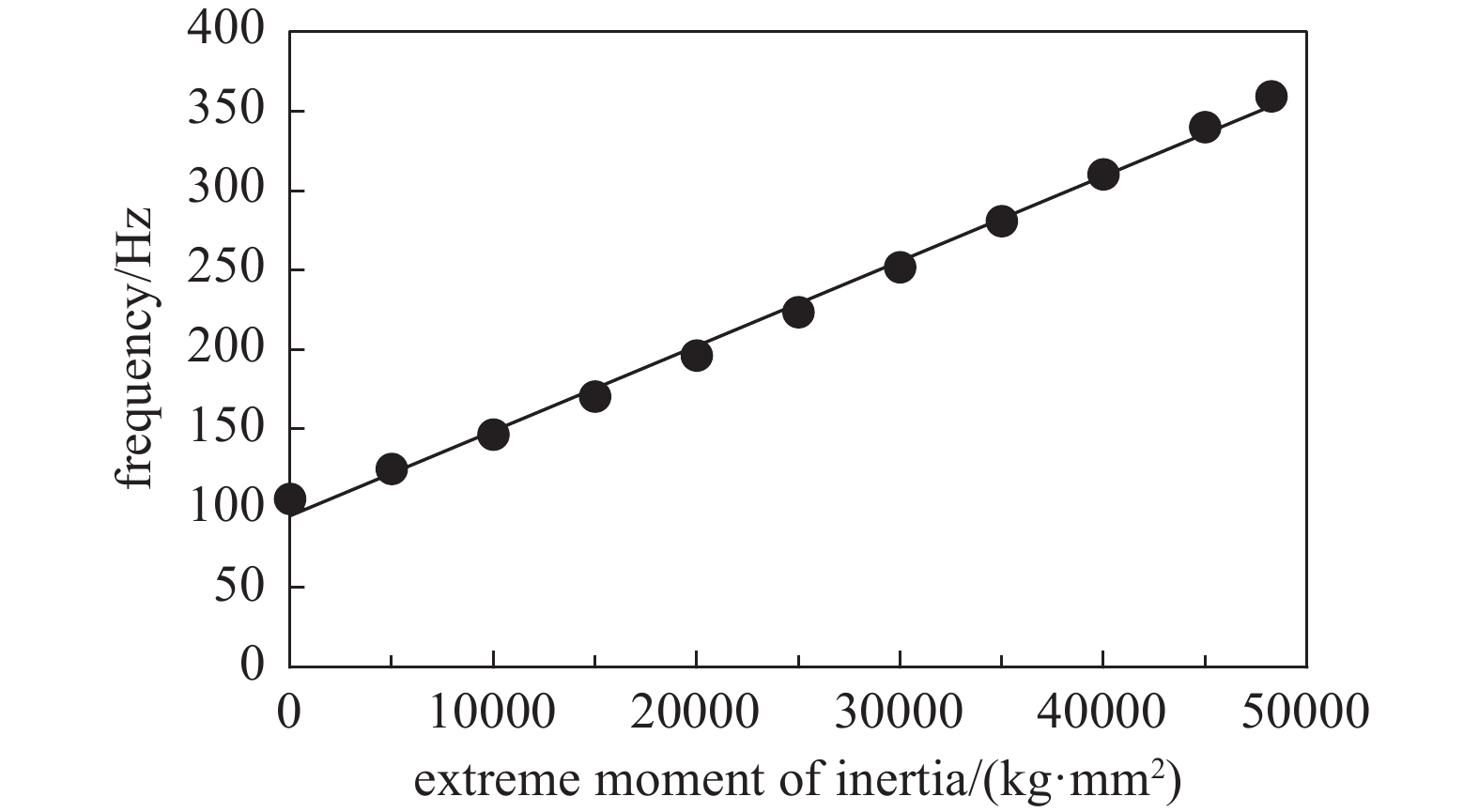
图 4 叶轮极轴转动惯量对章动频率的影响
Figure 4. The effect of the impeller polar moment of inertia on the nutation frequency
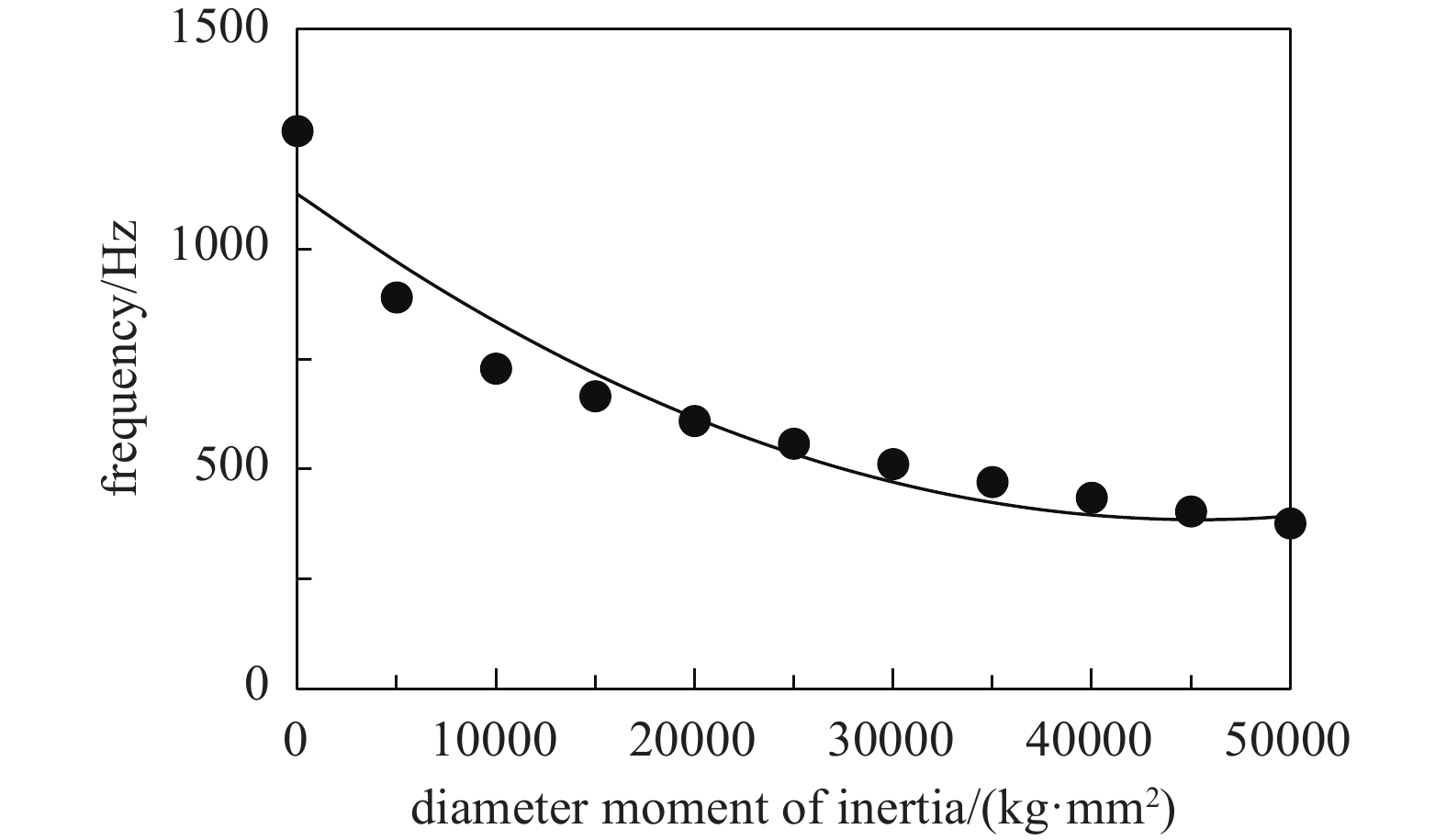
图 5 叶轮直径转动惯量对章动频率的影响
Figure 5. The effect of impeller diameter and moment of inertia on nutation frequency
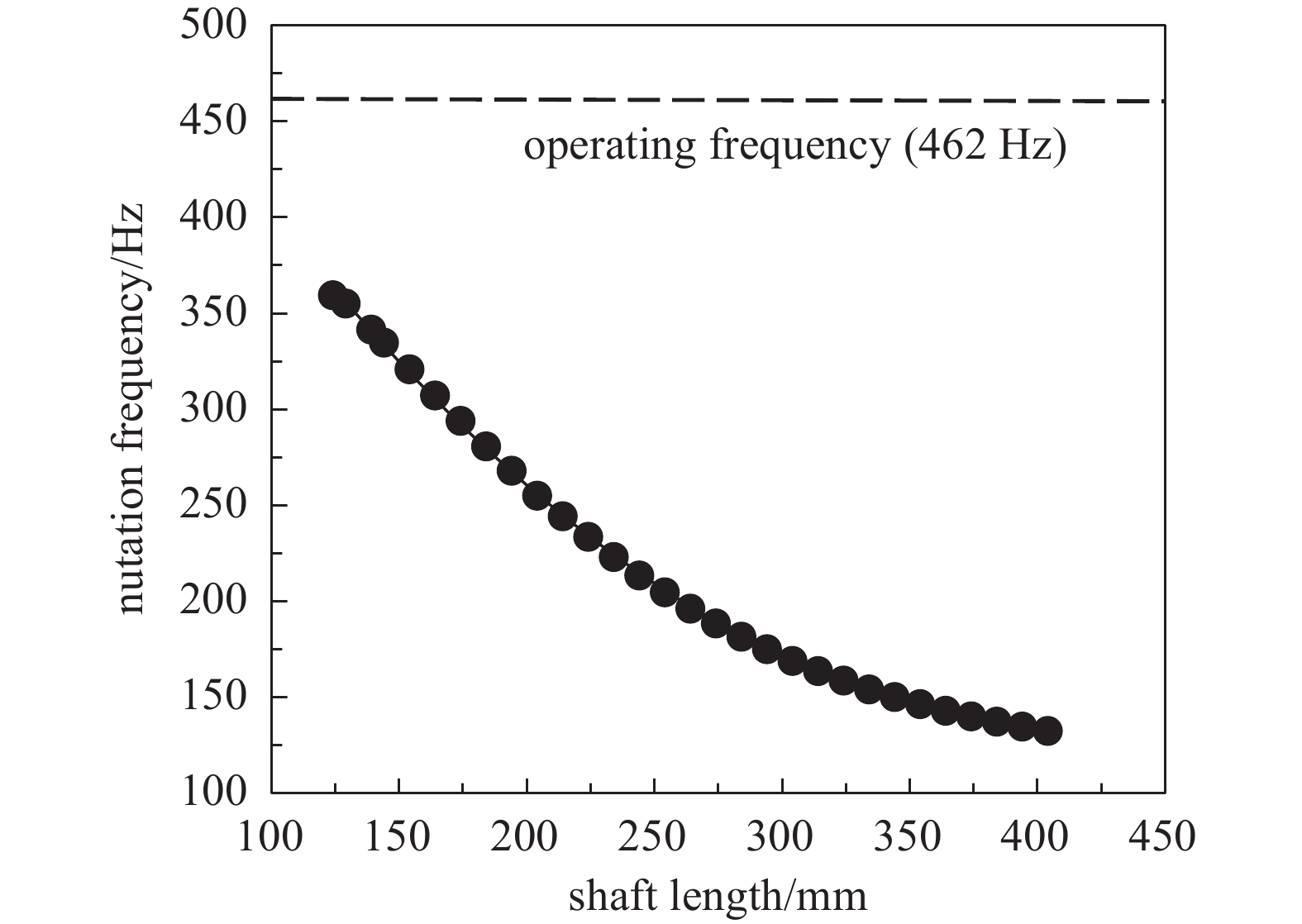
图 6 主轴长度l对转子章动频率的影响
Figure 6. The effect of spindle length l on the nutation frequency of the rotor
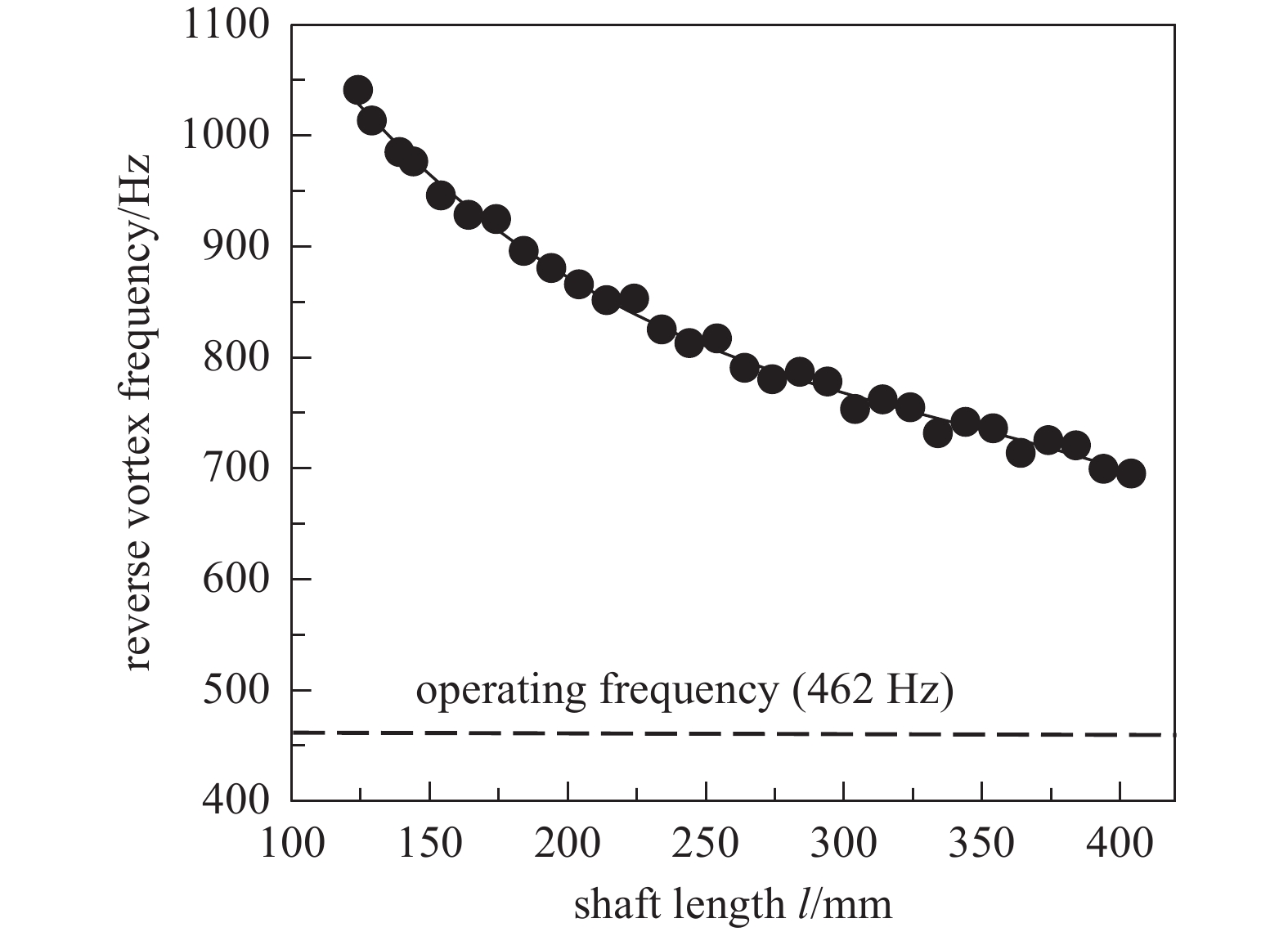
图 7 主轴长度l对转子反向涡动频率的影响
Figure 7. The effect of spindle length l on the reverse whirling frequency of the rotor
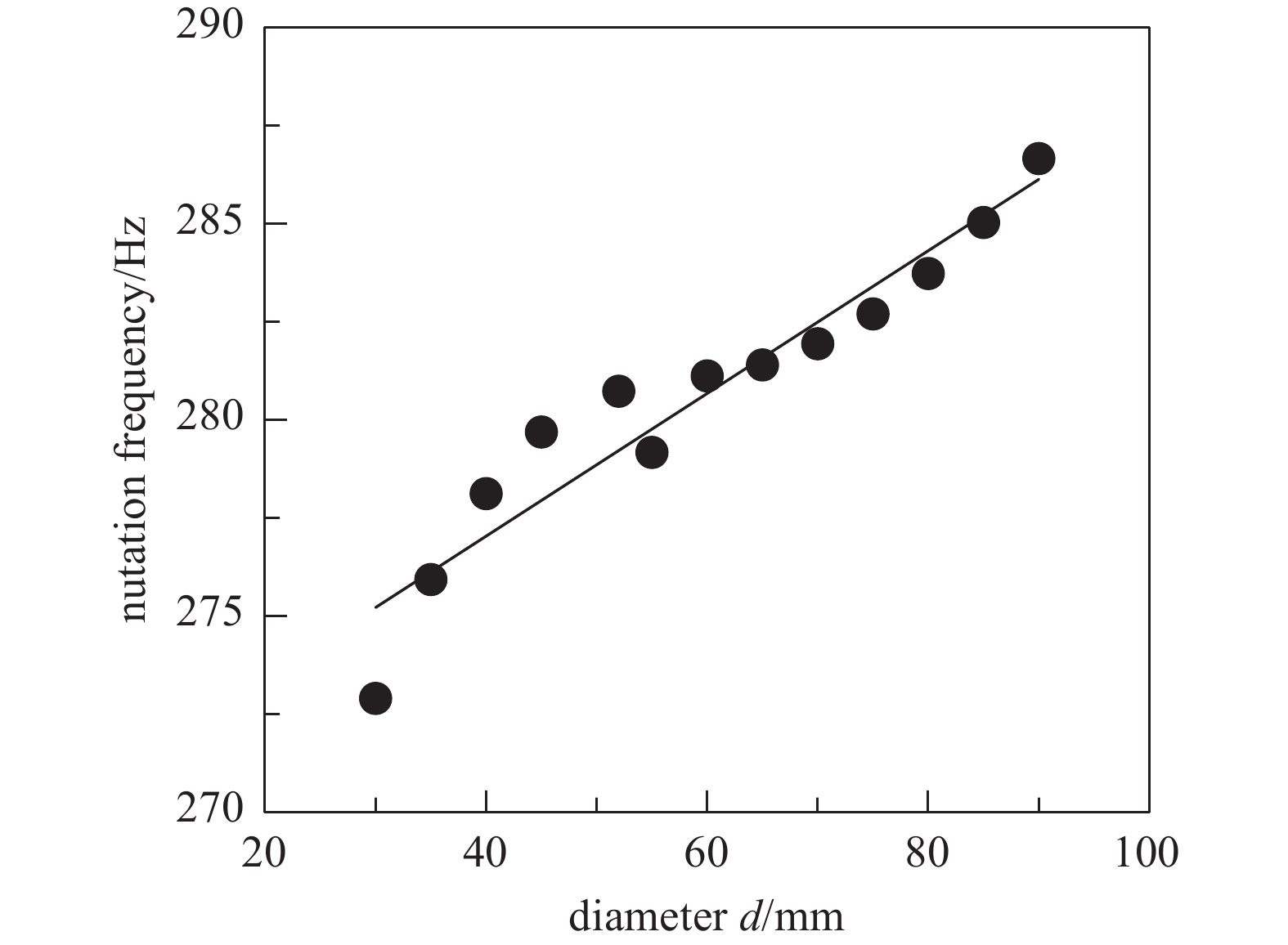
图 8 主轴直径d对转子章动频率的影响
Figure 8. The effect of spindle diameter d on the nutation frequency of the rotor
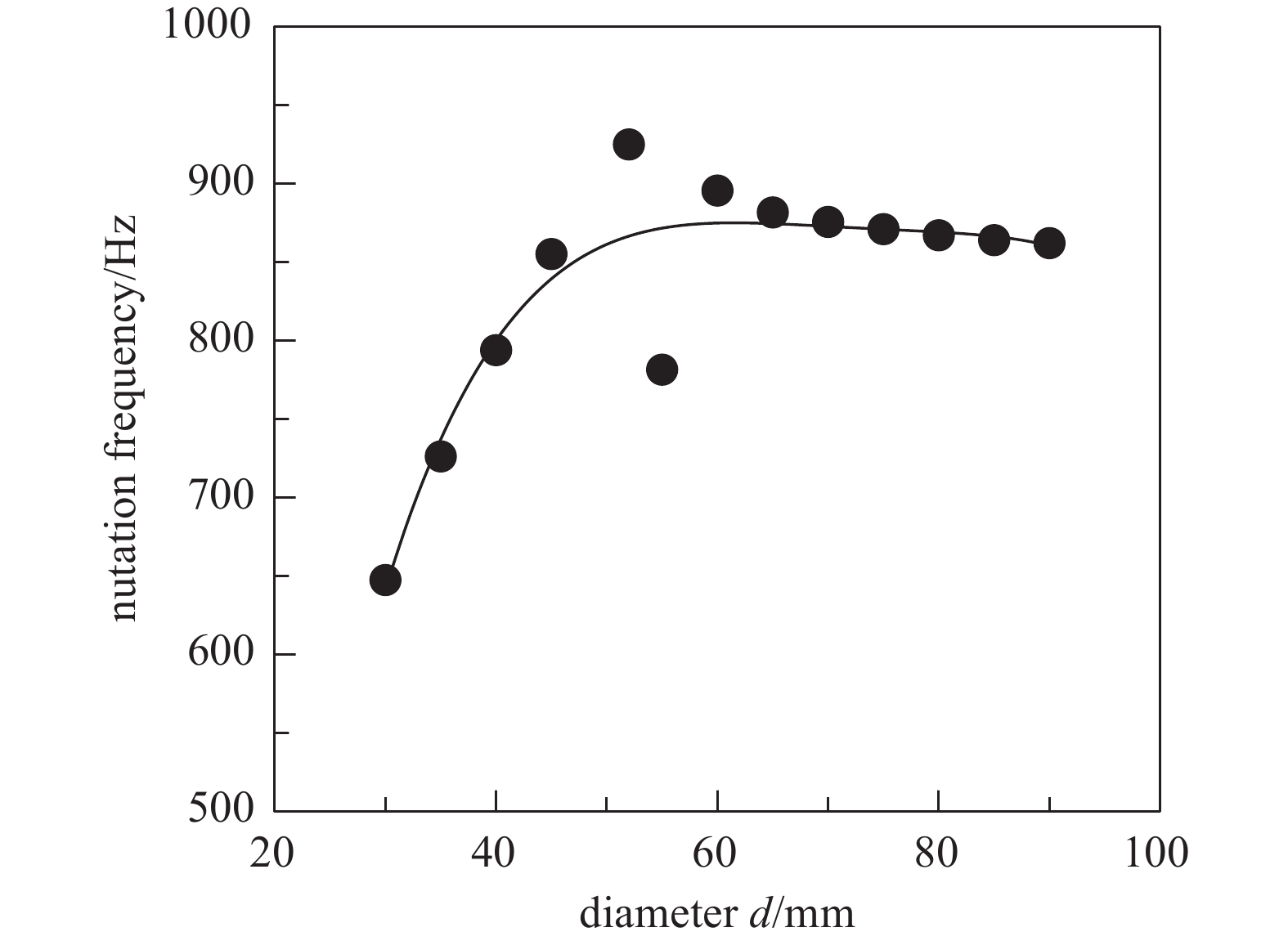
图 9 主轴直径d对转子弯曲频率的影响
Figure 9. The effect of spindle diameter d on rotor bending frequency
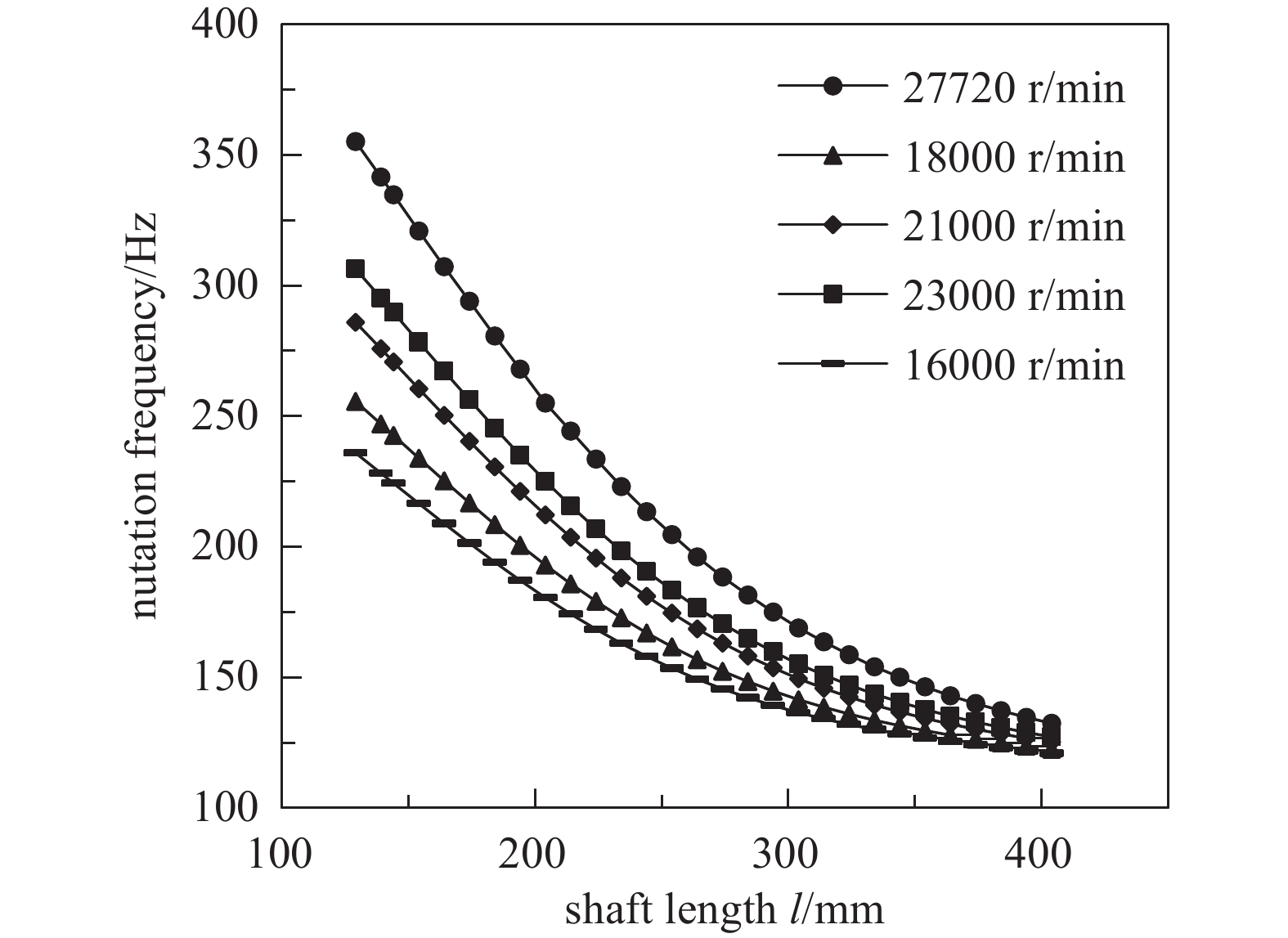
图 10 不同转速下主轴长度l对章动频率的影响
Figure 10. The effect of spindle length l on nutation frequency at different rotation speeds
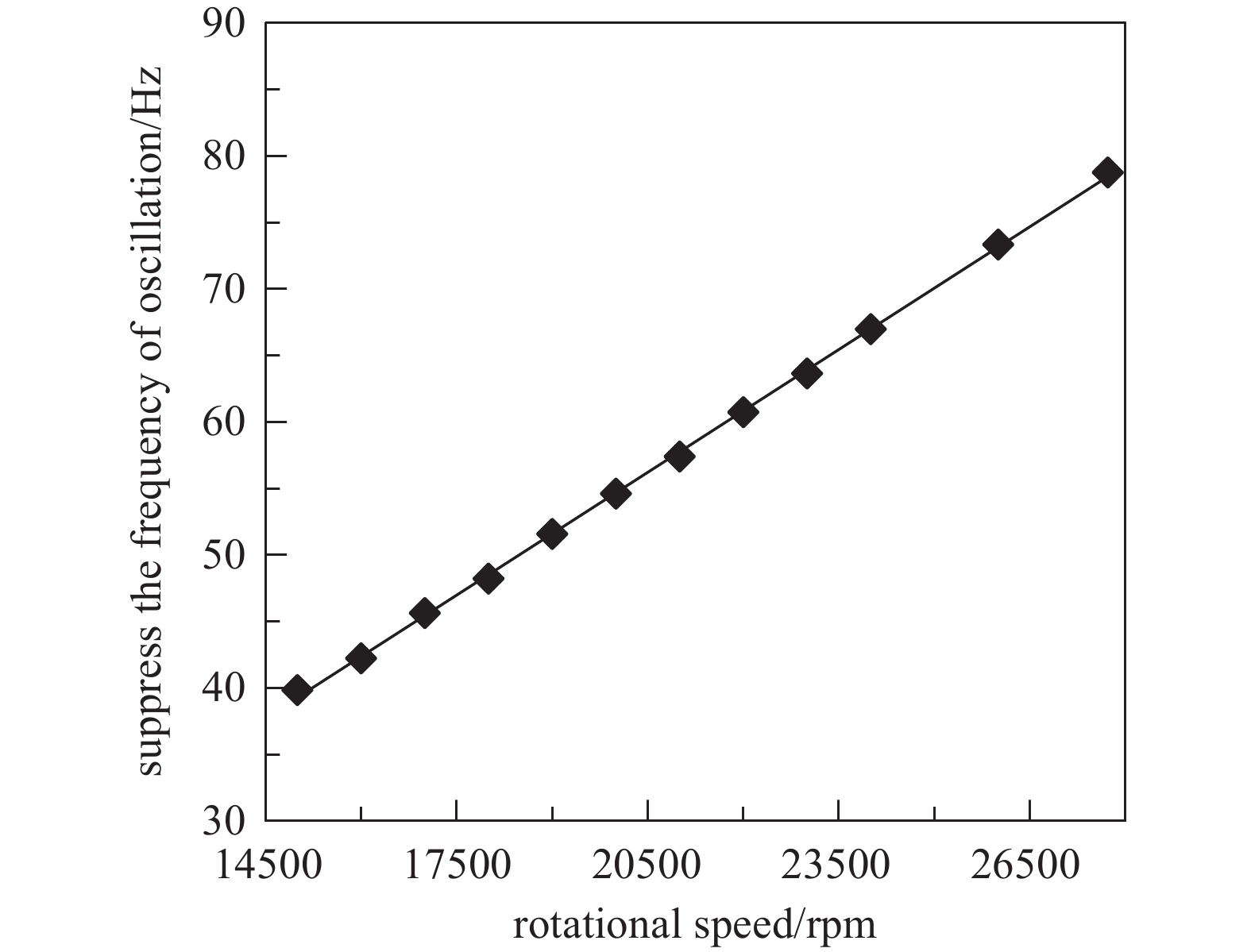
图 11 转速对抑制章动频率的影响
Figure 11. The effect of rotation speed on nutation frequency suppression
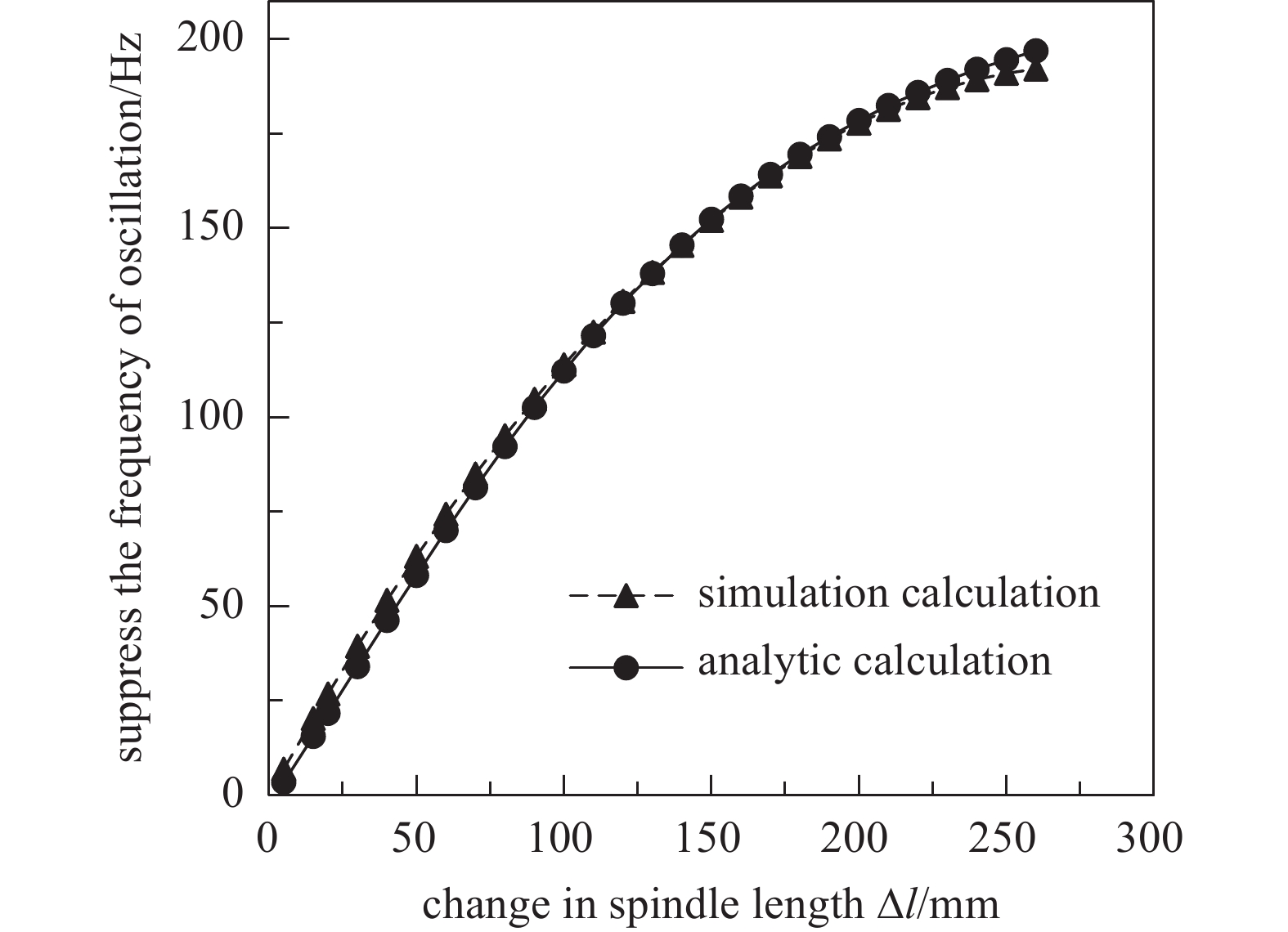
图 12 公式(6)解析计算与仿真计算结果对比
Figure 12. Formula (6) comparison of analytical calculation and simulation results
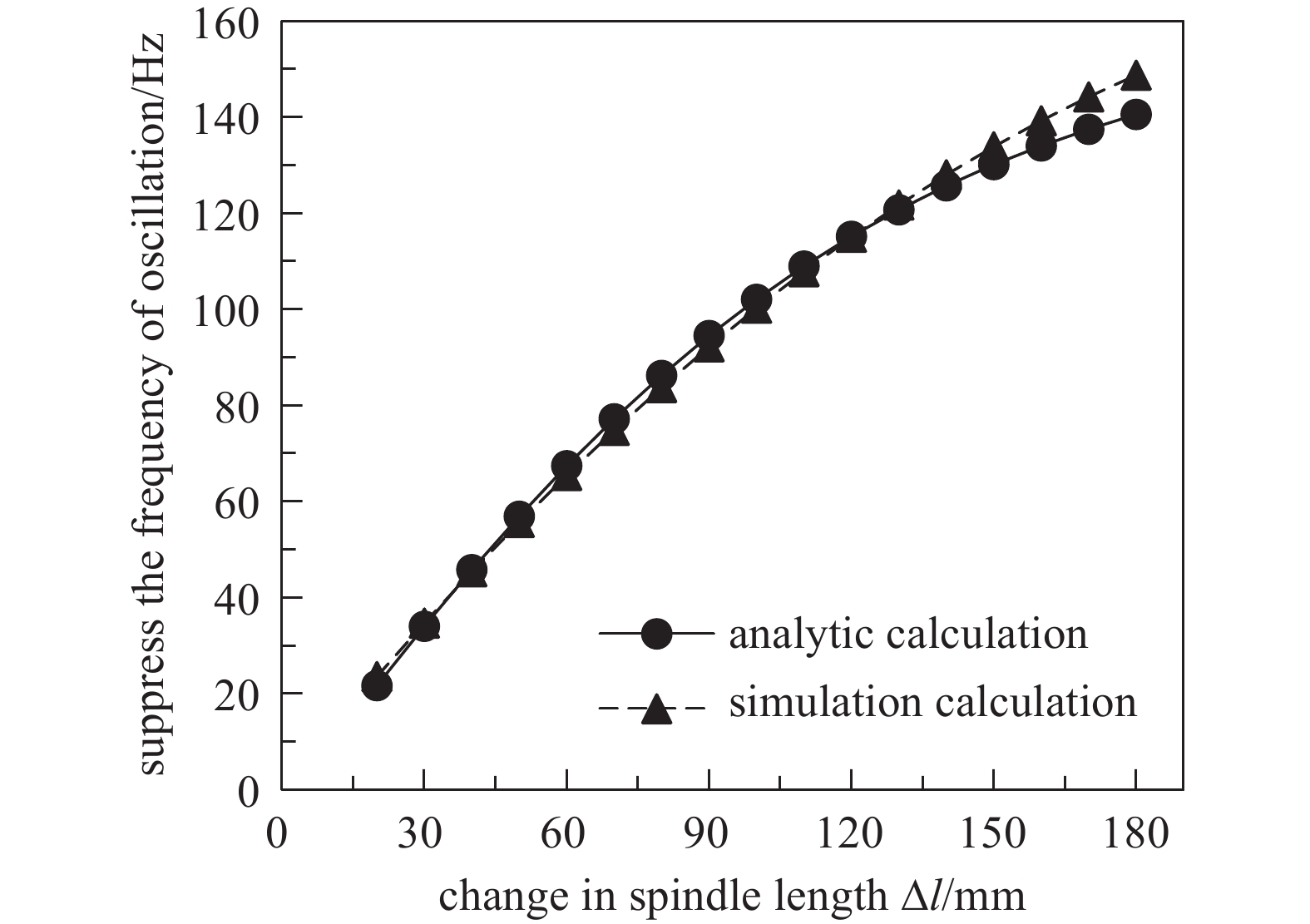
图 14 解析计算与仿真计算结果对比
Figure 14. Analysis of the comparison between computational and simulation results
表 1 磁悬浮分子泵参数表
Table 1. Magnetic levitation molecular pump parameter table
名称 数值 转子直径转动惯量 $ {J}_{d} $ /(kg·mm2)66454 转子极转动惯量 $ {J}_{p} $ /(kg·mm2)47278 额定转速/(r/min) 27720 额定功率/kW 1.5 转动惯量比 0.71 径向磁轴承刚度/(N/mm) 800 轴向磁轴承刚度/(N/mm) 1200 阻尼/(N·s/mm) 0.1  下载: 导出CSV
下载: 导出CSV
表 2 验证公式(5)所用磁悬浮分子泵参数表
Table 2. Verification of the parameters of the magnetic levitation molecular pump used in formula (5)
名称 数值 转子直径转动惯量 $ {J}_{d} $ /(kg·mm2)48344 转子极转动惯量 $ {J}_{p} $ /(kg·mm2)33544 额定转速/(r/min) 20000 额定功率/kW 1.5 转动惯量比 0.69 径向磁轴承刚度/(N/mm) 800 轴向磁轴承刚度/(N/mm) 1200 阻尼/(N·s/mm) 0.1
下载: 导出CSV
表 3 计算值与实验值振动频率对比
Table 3. Comparison of calculated and experimental vibration frequencies
名称 计算结果 试验结果 刚体平动/Hz 53 47 刚体章动/Hz 101 97 弯曲频率/Hz 1110 1092
下载: 导出CSV
-
[1] 王晓东, 张鹏飞, 李博, 等. 分子真空泵研究进展[J]. 真空科学与技术学报, 2021, 41(9): 817−825 (in Chinese) Wang X D, Zhang P F, Li B, et al. Research progress of molecular vacuum pump[J]. Chinese Journal of Vacuum Science And Technology, 2021, 41(9): 817−825 [2] 巴德纯, 王晓冬, 刘坤, 等. 现代涡轮分子泵的进展[J]. 真空, 2010, 47(4): 1−6 (in Chinese) Ba D C, Wang X D, Liu K, et al. Progress in R&D of modern turbo-molecular pumps[J]. Vacuum, 2010, 47(4): 1−6 [3] 匡永麟, 王晓冬, 黄海龙, 等. 涡轮分子泵叶列抽气性能的计算方法改进[J]. 真空科学与技术学报, 2022, 42(1): 26−30 (in Chinese) Kuang Y L, Wang X D, Huang H L, et al. Improvement of the calculation method of the pumping performance of the turbomolecular pump blade row[J]. Chinese Journal of Vacuum Science and Technology, 2022, 42(1): 26−30 [4] 孙坤, 邓海顺, 胡鑫, 等. 高转速背景下涡轮分子泵的发展机遇与挑战[J]. 真空科学与技术学报, 2024, 44(8): 657−667 (in Chinese) Sun K, Deng H S, Hu X, et al. The development opportunities and challenges of turbomolecular pump under the background of high rotational speed[J]. Chinese Journal of Vacuum Science And Technology, 2024, 44(8): 657−667 [5] 谢元华, 佟英博, 谢天意, 等. 径向涡轮分子泵叶片结构优化及仿真分析[J]. 真空科学与技术学报, 2025, 45(1): 36−42 (in Chinese) Xie Y H, Tong Y B, Xie T Y, et al. Structural optimization and simulation analysis of radial turbomolecular pump blade[J]. Chinese Journal of Vacuum Science and Technology, 2025, 45(1): 36−42 [6] 巴德纯, 王晓冬. 分子真空泵的理论与实践[M]. 北京: 科学出版社, 2021 (in Chinese) Ba D C, Wang X D. The theory and practice of molecular vacuum pump[M]. Beijing: Science press, 2021 [7] 郑世强, 陈诚, 刘刚, 等. 磁悬浮分子泵高速转子章动相位裕度跟踪补偿控制[J]. 机械工程学报, 2018, 54(17): 100−107 (in Chinese) doi: 10.3901/JME.2018.17.100 Zheng S Q, Chen C, Liu G, et al. High-speed rotor nutation phase margin tracking compensation control of magnetic suspension molecular pump[J]. Journal of Mechanical Engineering, 2018, 54(17): 100−107 doi: 10.3901/JME.2018.17.100 [8] 姚润晖, 周瑾, 丁嵩. 磁悬浮分子泵转子振动抑制研究[J]. 振动与冲击, 2024, 43(1): 116−122 (in Chinese) Yao R H, Zhou J, Ding S, et al. Vibration suppression of magnetic levitation molecular pump rotor[J]. Journal of Vibration and Shock, 2024, 43(1): 116−122 [9] 付磊, 徐向波, 李俊峰. 无转速传感器的磁悬浮分子泵陀螺效应抑制[J]. 光学精密仪器, 2024, 32(21): 3211−3221 (in Chinese) doi: 10.37188/OPE.20243221.3211 Fu L, Xu X B, Li J F. Gyroscopic effect suppression of magnetic levitation molecular turbo without speed sensor[J]. Optics and Precision Engineering, 2024, 32(21): 3211−3221 doi: 10.37188/OPE.20243221.3211 [10] 熊万里, 孙文彪, 刘侃, 等. 高速电主轴主动磁悬浮技术研究进展[J]. 机械工程学报, 2021, 57(13): 1−17 (in Chinese) Xiong W L, Sun W B, Liu K, et al. Active magnetic bearing technology development in highspeed motorized spindles[J]. Journal of Mechanical Engineering, 2021, 57(13): 1−17 [11] 沈易霏, 韩邦成, 郑世强. 非对称大惯量刚性磁悬浮高速转子陀螺效应自适应抑制方法研究[J]. 振动与冲击, 2016, 35(22): 72−79 (in Chinese) Shen Y F, Han B C, Zheng S Q. Research on the adaptive suppression of gyroscopic effect of rigid asymmetric magnetically suspended high-speed rotor with large inertia[J]. Journal of Vibration and Shock, 2016, 35(22): 72−79 [12] 窦甄. 基于陀螺效应的磁悬浮飞轮涡动与RBFNN滑模控制[D]. 哈尔滨: 哈尔滨工程大学, 2022 (in Chinese) Dou Z. Vortex of magnetic levitation flywheel and RBFNN sliding mode control based on gyro effect[D]. Harbin: Harbin Engineering University, 2022 [13] 陈亮亮, 祝长生, 王忠博. 电磁轴承高速飞轮转子模态分离-状态反馈解耦控制[J]. 中国电机工程学报, 2017, 37(18): 5461−5472,5546 (in Chinese) Chen L L, Zhu C S, Wang Z B. Decou-pling control for active magnetic bearing high-speed flywheel rotor based on mode separation and state feedback[J]. Proceedings of the CSEE, 2017, 37(18): 5461−5472,5546 [14] Zhang K, Dong J P, Dai X J, et al. Vibration control of a turbo molecular pump suspended by active magnetic bearings[C]. Canada: Proceedings of ASME Turbo Expo 2011, 2011 [15] Fang J C, Ren Y, Fan Y H. Nutation and precession stability criterion of magnetically suspended rigid rotors with gyroscopic effects based on positive and negative frequency characteristics[J]. IEEE Transactions on Industrial Electronics, 2013, 61(4): 2003−2014 -
计量
- 文章访问数: 77
- HTML全文浏览数: 77
- PDF下载数: 1
- 施引文献: 0