
 首页
首页 登录
登录 注册
注册



 下载:
下载:

-
深空探测的重要目标之一是对地外天体星壤样品进行研究,地外天体星壤为揭示地外资源、宇宙演化、物质结构、生命起源等前沿科学问题提供了重要的研究依据,星壤样品始终为天体探测的热点课题[1]。随着探测技术发展,星壤样品的分析方式由原位测量转变为样品返回地球研究,如何采集、封装星壤样品并最大限度保证样品成分不变,成为决定地外天体采样任务成败的关键。
自20世纪六七十年代以来,国外已开展了多次地外天体采样返回任务,其中包括:前苏联“Luna” 系列无人自动月球采样返回任务、美国“阿波罗”系列载人月球采样返回任务、美国“星尘号”彗星样品采样返回任务、日本“隼鸟”系列小行星采样返回任务、美国“奥西里斯号”小行星采样返回任务、美国“火星样品返回计划”火星采样返回任务等。除此之外,中国也于2020年11月发射了“嫦娥五号”月球探测器,成功实施了月球样品的采样返回任务。
随着科技进步,中国的探测任务将逐步由近地探测向深空探测转变,由月球样品的采样返回,向小行星、彗星、火星样品的采样返回转变,由无人自动采样向载人登陆采样转变。飞行时间的增长、传送距离的增加、样品采样和运输环境的变化势必对采样和密封技术带来新的挑战。
鉴于此,本文综述了国内外地外天体采样和密封技术的研究进展,重点介绍了不同星体表面环境、引力大小、样品成分与不同采样和密封方案的适配性,总结了不同采样和密封方案的特点与不足。在此基础上,对地外天体采样密封技术的下一步发展进行了展望,为中国未来深空探测中星壤样品收集方式和密封技术的选择提供参考建议,促进了采样密封技术的进一步发展。
-
月球表面引力约为地球的1/6,探测器可附着于月球表面完成采样和封装。月球表面风化层样品形态主要为粉末、碎屑、角砾和撞击熔融玻璃等,粒径尺寸分布范围广,颗粒形态差别大[2]。月海区风化层厚度约为4~5 m,月陆区风化层深度可达10 m[3-4],因此月球表面的采样工作主要为风化层采样,可采用表面铲取或钻取的采样方式。月表大气压约为10−8~10−10 Pa,且月表不存在液态水,月壤在采样封装前始终处于超高真空、强辐射、干燥的环境[5]。鉴于此,月壤在返回地球过程中需要进行真空密封,将月壤与地球大气隔绝,避免月壤被大气环境中的水、氧或其他有机质污染。
基于上述原因,各国对月壤的采样方式基本上为探测器着陆于月球后,对其开展钻取、铲取或钻/铲相结合的采样方式。为了避免月壤被大气污染,各国均对月壤进行真空密封,采用橡胶圈密封、金属密封或橡胶圈/金属相结合的密封方式。
-
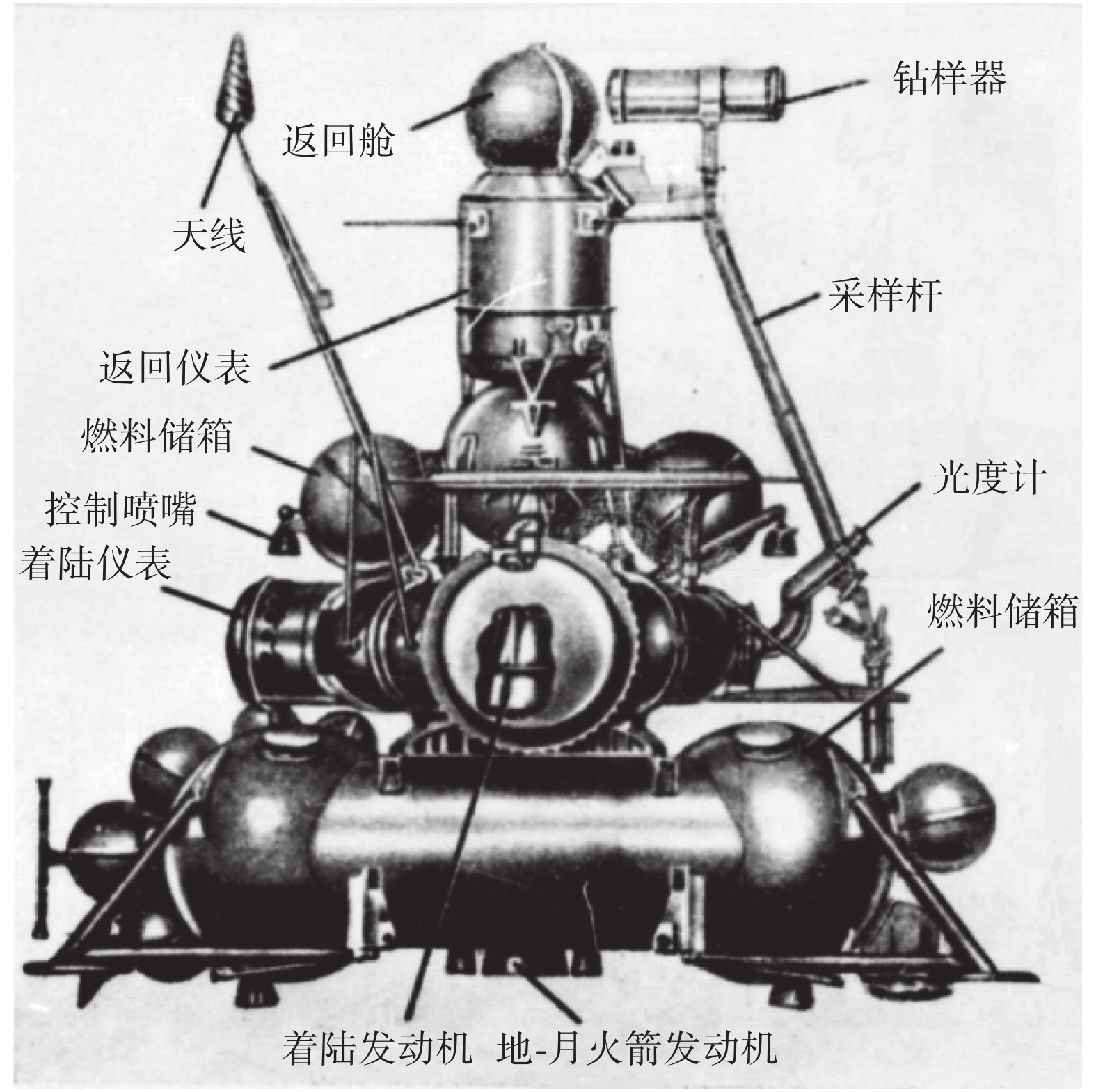
苏联于1970年发射了人类历史上首个无人自动月球采样返回探测器Luna-16号,结构如图1所示[6],采用右侧钻样器对月球表面进行钻取采样,采样深度为350 mm,共收集了101 g粉末状样品,样品平均直径≤1mm[7-8]。
Luna-16号的采样过程如下:当采样开始时,采样杆顺时针旋转120°,钻样器与月表接触,进行样品钻取操作。采样结束后,采样杆逆时针转回,将钻样器提升至与地面平行位置。随后钻样器绕采样杆轴向旋转180°,将装有土壤样品的岩心管传递至样品密封容器内。密封盖体和返回舱舱门同时关闭,完成样品的收集和密封。样品密封容器盛装岩心样品后的结构如图2(b)所示。
样品密封容器为圆柱形结构,位于探测器顶部返回舱内,开口朝向返回舱侧壁,与侧壁舱门开口方向一致,如图2(a)所示。样品密封容器采用单道橡胶圈的密封结构,橡胶圈安装于密封容器盖体侧壁斜面上,当样品收集完毕合盖时,筒体挤压盖体密封圈,实现样品密封[9]。
1972年发射的Luna-20号,采样方式和密封方式与Luna-16号相同,由于采样过程出现样品滑落和掉样现象,只收集了55 g无层理信息的月壤样品 [10-12]。
1976年发射的Luna-24号是苏联最后一次月壤采样任务,共获得170.1 g月球样品。此次任务的采样方式仍为钻取采样,将钻取样装于软袋后螺旋缠绕于样品筒内,如图3所示,样品筒(含内部样品)密封于样品容器中。与之前任务相比,该存储方式既提升了采样量,又能保证样品层理信息一致。样品容器延续了Luna-16和Luna-20的设计[13-14]。
Luna系列月球样品容器在返回地球时发生泄漏,内部压力均升至大气压,具体原因为以下几点:返回舱在穿过大气时的振动和着陆冲击,造成了样品容器盖体与罐体轴心偏移,导致一侧橡胶圈的压缩率减小,密封容器发生泄漏;边缘锋利的月壤附着于橡胶圈,破坏了橡胶圈的完整性并产生了泄漏通道。以上分析说明地外天体采样返回任务采用单层橡胶圈密封效果有限。
-
1969年至1972年,美国发射了阿波罗11~17号载人飞船,共实施了6次载人登月采样任务,期间带回约381.7 kg月壤和月岩样品[16]。
由于Apollo系列为载人登月任务,因此采样工具均为手持式工具,主要包括以下几种:(1)驱动管(Apollo 11-14号)或取样钻头(Apollo 15-17号)对地下样品进行钻探采样;(2)采样铲对月表粉末样品进行铲取采样;(3)采样钳夹取表面石块样品。采样工具的形状和结构如图4所示[17]。
为了盛装月球样品,NASA设计了通用的月球样品返回容器和单独存储和密封样品的特殊样品容器。
-
月球样品返回容器的外观如图5所示,外包络尺寸为482 mm×292 mm×203 mm,内部容积为23 L,总重量约为6.8 kg。整个容器为薄壁金属铝容器,内壁衬有15层铝丝编织网,可对大块样品及特殊样品容器起到支撑和防护的作用,避免了内容物与器壁之间的碰撞。由于容器在低温下工作,容器外表面抛光处理。
在存储阶段,样品返回容器盖体关闭,仅有橡胶圈对其内部进行密封。到达月面后,宇航员使用工具手动完成采样、样品分装,随后手动打开容器并按顺序放置样品,样品间采用编织网隔开。完成装样操作后,宇航员手动取下样品防尘罩(限于Apollo11号任务)或折叠样品密封保护罩(Apollo12-17号任务)露出密封面,关闭容器盖体并旋转锁紧机构完成容器锁紧。
Apollo样品返回容器的密封结构为刀口刃入软金属与双道橡胶圈冗余密封结构,如图6所示。主密封为金属密封,选用铟含量90%、银含量10%的铟银合金。金属密封条在发射前熔焊于罐体密封槽内,底面和侧面均与罐体侧壁接触密封,顶面与密封槽齐平。盖体设有刀口结构,密封前刀口被防尘结构阻隔不与铟银合金接触(如图6(a)),密封后刀口刃入铟银合金内(如图6(b)),刃入深度约为0.1~0.2 mm。为了保证橡胶圈在低温下的工作性能,双层O型橡胶圈选用氟硅酮材料。整个密封系统的测试漏率优于1.79×10−9 Pa·m3/s。
Apollo 11号采用的防尘罩采用特氟龙和四氟乙烯薄膜两种材料焊接而成,其中特氟龙用于橡胶圈表面防尘,聚四氟乙烯薄膜用于金属密封面防尘,具体结构如图7(a)所示。防尘罩在存储阶段覆盖于密封结构上,样品关盖密封前,航天员手动取下防尘罩。Apollo 11号返回后,检测到样品返回容器密封结构失效,容器内部压力升高至一个大气压。为了提升防尘效果,NASA在Apollo 12~17号任务中采用了密封面保护罩,如图7(b)所示。保护罩的材料为特氟龙布与薄膜的复合材料,具有材料密度高、厚度薄、可折叠的特点,在存储时覆盖整个密封面和盖体,地面验证试验显示能够有效防止月尘穿过,但是在实际应用中,Apollo 12~17号样品返回容器的密封结构全部失效,返回地球后内部压力升高至一个大气压[18]。
-
为了满足特殊科学试验的要求,NASA设计了四种用于特殊样品单独存储的样品容器,分别为特殊环境样品容器(Special environmental sample container, SESC)、岩心样品真空容器(Core sample vacuum container, CSVC)、气体分析样品容器(Gas analysis sample container, GASC)和磁屏蔽样品容器(Magnetic shield sample container, MSSC),如图8所示。特殊样品容器可对特殊样品进行初级封装,由返回容器统一进行二次密封。
SESC、CSVC和GASC均为薄壁圆筒型真空容器,密封结构为刀口刃入铟银合金的金属密封,密封结构如图9所示。宇航员手动旋转盖体手柄,向密封面施加约2 N·m的扭矩,可将筒体的不锈钢刀口刃入盖体焊接的铟银合金内。为了避免月尘影响密封效果,特殊样品容器设有聚四氟乙烯密封保护罩,如图8(b)所示,在样品装填期间保护密封结构,样品合盖密封前移除。MSSC不是真空密封容器,主要功能是在低磁场环境中保护月球样品。罐体采用高磁场衰减因子的合金材料,外层包裹聚四氟乙烯保护套,盖体与罐体处不设有密封结构。
-
中国于2020年成功发射“嫦娥五号”月球探测器,成功带回1731 g月球样品,是中国首次地外天体采样返回任务[19-20]。
在发射准备阶段,月球样品密封封装装置经过内部真空除气、高温灭菌净化后,充入略高于大气压的高纯氮气,利用橡胶圈径向密封,防止大气污染容器内部。当探测器完成样品收集后,机械臂将表取样品和钻取样品依次放置于密封封装装置内。待确认样品收集完成后,电机驱动盖体向下运动,密封封装装置自动锁紧密封,由返回器带回地球[21]。
月球样品密封封装装置总质量为4.77 kg,内部有效容积4 L,样品盛装能力为5 kg,由主体框架、密封容器组件、盖体组件、开合机构组件和控制单元等组成,如图10所示。容器罐体为钛合金制成的薄壁筒体结构,能够承受返回时的着陆冲击和一个大气压的压差。主体框架采用钛合金和铝合金制作,侧壁做镂空设计,在保证结构强度和刚度的同时最大限度地减轻了重量。为了保证无人情况下的自动开合和锁紧密封,设计了基于丝杆传动原理的复合运动开合机构,实现了装置在月表的直线提升-旋转打开-旋转关闭-直线下降的功能[22]。
为了在返回地球后保持月壤原样,综合考虑月表的超高真空环境、样品采集自动化及密封可靠性的要求,采用软金属和O型橡胶圈的冗余密封结构,如图11所示。密封金属和O型橡胶圈均集成于密封容器盖体上,当盖体闭合时刀口刃入软金属内形成金属密封的同时,O形橡胶圈与封装容器内壁形成径向弹性密封[23]。橡胶圈选用改性低温硅橡胶,工作温度为−90℃~200℃,可适应月表的低温环境。金属密封材料采用铟银合金[24]。密封后,刀口刃入铟银合金深度为0.5 mm[25]。该密封结构在经历空间高低温环境后,仍能在常温下维持10−11 Pa·m3/s的密封漏率[26-27]。
-
美国于1999年发射了彗星采样返回的探测器“星尘号”,采样目标为怀尔德2号(Wild 2)彗星,共收集到1000个直径大于15 μm的彗星尘埃粒子和气体样品[28]。
彗星的组成物质是宇宙尘埃和冰,表面温度极低,且一直高速向外甩出尘埃形成彗尾。探测器一旦靠近彗核,彗尾的高速尘埃可能撞击探测器使其变形,甚至摧毁探测器;且探测器与彗星距离过近会引起彗星的加速运动,可能会造成彗星粒子形状和化学成分改变,甚至蒸发。因此传统的探测器着陆后实施钻/铲的采样方式难以应用于彗星的采样[29]。
“星尘号”创新性地研制了“网球拍”状的样品收集器,通过“飞越”彗尾的方式进行采样。样品收集器安装于返回舱内,具体结构和安装位置如图12所示。采样前,返回舱处于关闭状态,样品收集器位于返回舱内。当飞行至采样点时,返回舱舱门开启,样品收集器通过吊杆延伸到返回舱外,捕获外部气体和样品颗粒的自由流体。采样操作持续数分钟后,装有样品的收集器通过反向操作回收至返回舱,携带样品返回地球[30]。“星尘号”在飞行中共采集两次样品,一次是采用收集器的A侧收集怀尔德-2彗星样品,另一次是采用B侧收集飞行过程中遇到的星际尘埃粒子[31]。
样品收集器结构如图13所示,为铝制圆盘结构,直径为533 mm,厚度为101 mm,内部设有多个方形网格,网格中装有气凝胶材料,用于捕获飞行样品[32]。
气凝胶为多孔海绵结构的透明硅基固体,其中99.8%的体积为空气,密度仅为玻璃的1/1000。当样品颗粒高速撞击气凝胶时,气凝胶对样品颗粒施加阻力,使其速度减慢并逐渐停止。最终样品颗粒埋在气凝胶中,形成一条长度为自身长度200倍的狭窄锥形中空轨迹,如图14所示。返回地球后,科学家根据轨迹形态使用立体显微镜在气凝胶中搜寻样品粒子,并确定样品的运动方向和的最终位置。
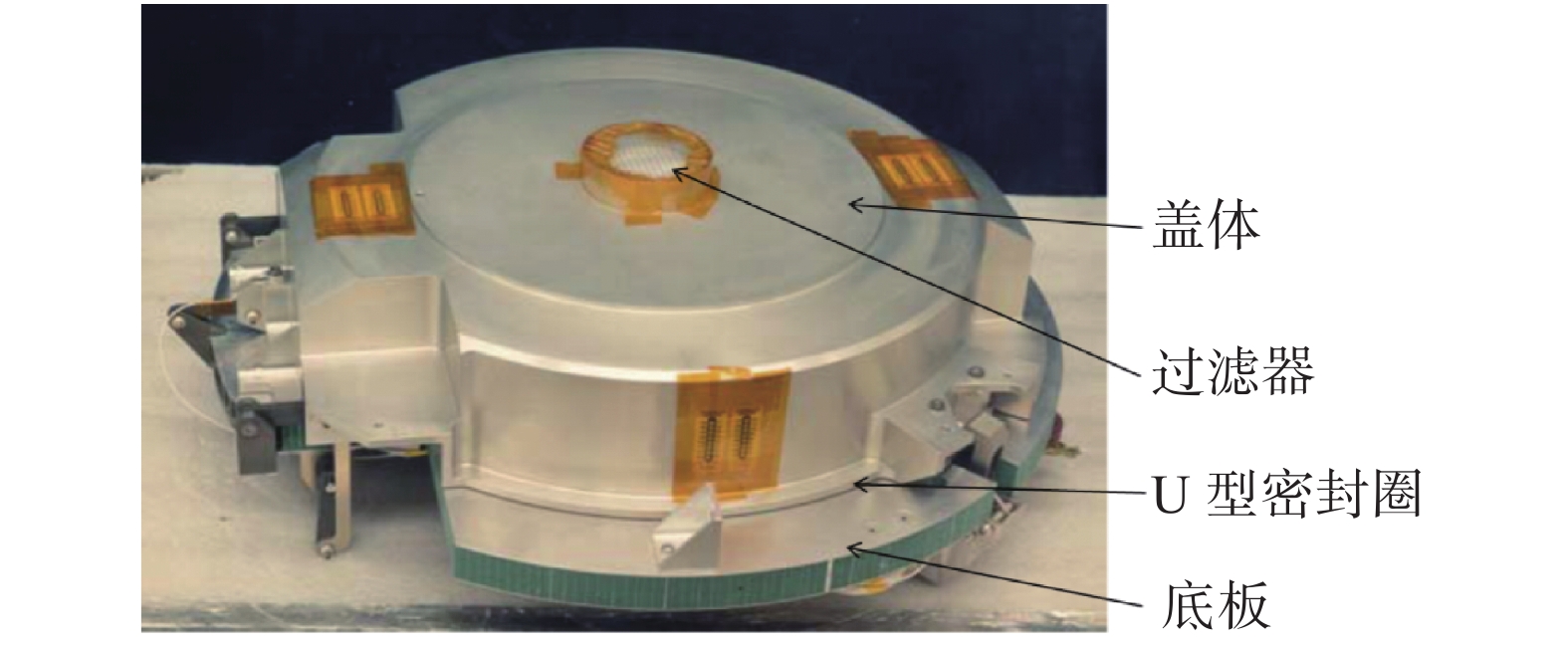
样品容器为类圆盘结构,分为底版和盖体两部分,具体结构如图15所示。底板采用全铝制蜂窝板,直径约610 mm,厚度为250 mm,表面覆盖铝板。盖体由铝合金制成,直径约503 mm,高度约为 102 mm。样品容器不采用真空密封结构,密封盖体边缘包裹聚四氟乙烯U型密封圈,顶部设有气体过滤器。U型密封圈能够保持容器内外6.9×103 Pa的压差。气体过滤器用于在发射升空和返回地球期间平衡容器内外压力,并吸附返回地球时隔热罩的烧蚀产物,避免污染样品。过滤器内部采用三层吸附结构,中间层为活性炭,对水、氧和部分有机物有吸附作用,保持容器内部相对湿度<10%,碳氢化合物含量<15 mg/L;内外两层为聚丙纤维过滤垫,可过滤直径>1 μm的粉尘颗粒[33-34]。
-
小行星表面为微重力环境,当探测器采样钻头向小行星地下钻取采样时,会受到向上的反作用力,探测器有可能会侧翻、弹飞甚至逃逸[35],因此常规附着钻取采样方式不适用于小行星表面采样。小行星绕飞轨道半径大,采样返回任务一般为发射一次采样探测器,同时完成“绕”、“探”、“采”、“返”的任务,具有采样地点地质环境不确定的特点,需要选择一种具有包络性的采样方法,无论是坚硬的岩石还是松散的风化层,都能将其变成散体收集[36]。
基于上述原因,在已经实施的小行星采样任务中,美国和日本均采用接触式采样。探测器悬停于小行星表面,仅通过采样机构与表面接触,将星壤离散化变成粉尘或小颗粒样品后,实施数秒的采样操作。样品密封容器和相对应的密封结构,与采样方式和小行星表面矿物质成分进行适配性设计。
-
日本于2004年发射的“隼鸟号”小行星采样任务,是人类历史上第一次针对小行星的采样任务[37]。“隼鸟号”的探测目标是S类小行星Itokawa(丝川),表面矿物质以硅酸盐和铁等无挥发特性的物质为主[38],表面风化层为碎石堆结构,碎石尺寸在毫米至厘米量级,形状极不规则[39]。由于“隼鸟号”采样机构故障,未收集到大颗粒样品,科学家仅在收集筒中发现了几千粒风化颗粒[40-42]。日本又于2014年发射了“隼鸟2号”小行星探测器,采样目标为C类近地小行星Ryugu(龙宫),该类小行星土壤中含有挥发成分,如水、不稳定有机分子和惰性气体等[43]。
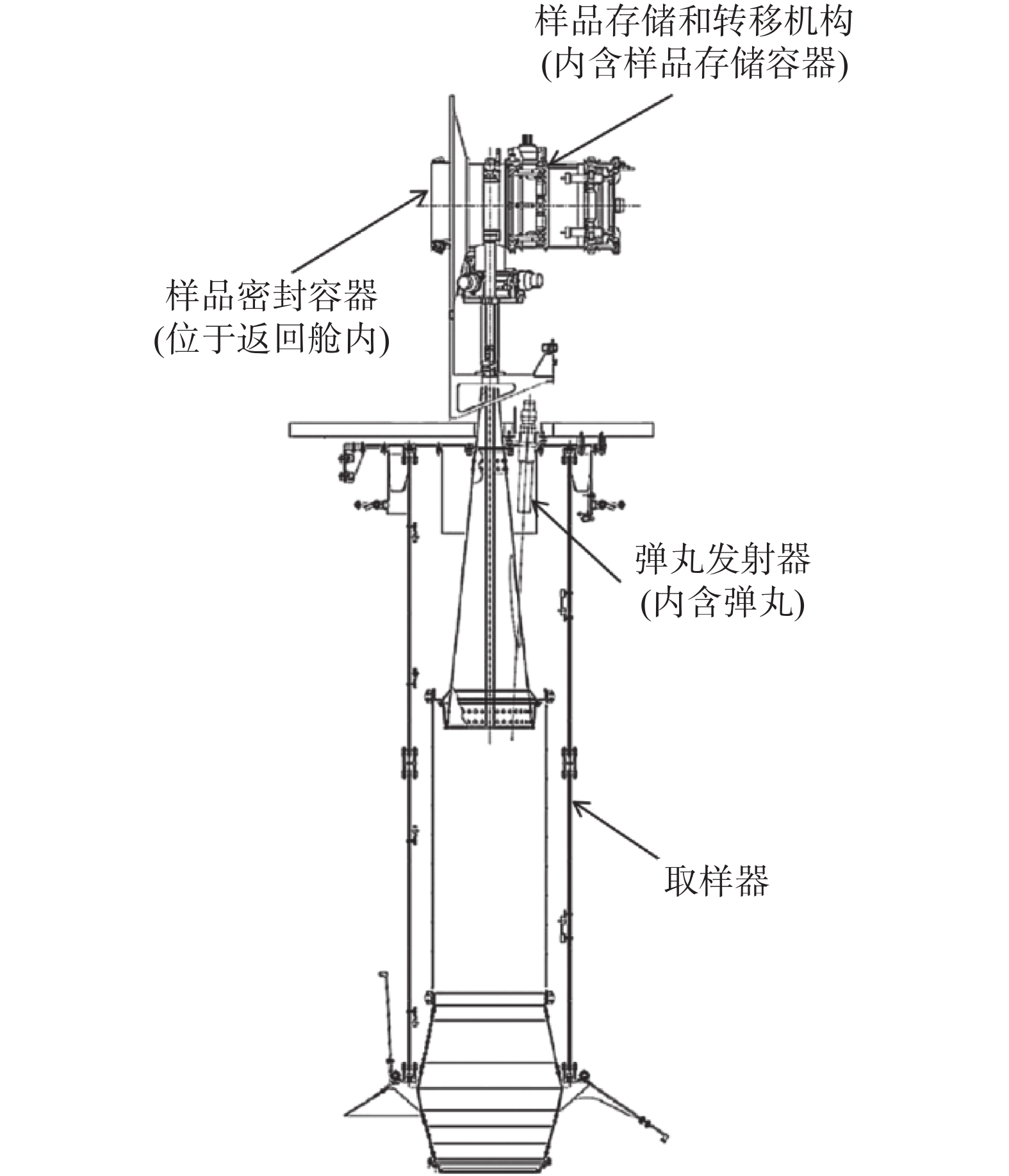
日本发射的两次小行星探测任务的采样系统和采样方式大致相同。采样系统由取样器、样品存储容器、样品密封容器、弹丸发射器和弹丸组成,如图16所示。探测器下方的取样器为喇叭型,一端连接样品存储容器,另一端为喇叭口,是小行星样品进入存储容器的入口。取样器内配备了弹丸发射器和多枚抛射弹丸,用于小行星表面分批、多次采样[44]。
“隼鸟号”与“隼鸟2号”采样的方式均为“即触即走”式采样。在存储模式,密封容器与存储容器分离,密封容器安装固定于返回舱内部中心位置,存储容器位于探测器中,与取样器连接。在第一次地表样品采集时,探测器缓缓靠近小行星表面,当采样器喇叭与小行星表面接触后,探测器悬停于距离小行星表面几米高度。随后弹丸发射器发射一枚5 g的弹丸,使其以300 m/s的速度撞击小行星表面,表面碎石飞溅,部分碎石沿取样器轴线方向运动至样品存储容器内。单次采样过程通常持续5 s,具体操作流程如图17所示。第一次采样完成后,探测器携带采集到的样品暂时飞离小行星表面[45]。“隼鸟号”共实施两次地表采样操作,“隼鸟2号”除了完成两次地表采样外,还将完成一次地下样品的收集。“隼鸟2号”探测器在距离小行星表面500 m时向小行星表面释放铜制撞击器,当探测器撤离至安全距离后,引爆撞击器使其以2 km/s的速度撞击小行星表面,向地面撞击形成直径约10 m的人工深坑。当探测器确认深坑的安全性后,飞行至撞击坑内,采用“即触即走”的方式采集一次坑内样品[44,46]。“隼鸟2号”计划在三个着陆点共收集100 mg样品。
当样品收集完成后,推杆同时将存储容器连同锁紧机构推入密封容器中,当密封材料与密封面接触后,推杆机构撤销推力。随后压缩弹簧反弹,弹簧一端向密封面传递29N压紧力,另一端推动锁紧机构向上运动,完成容器的锁紧。具体放样过程如图18所示。
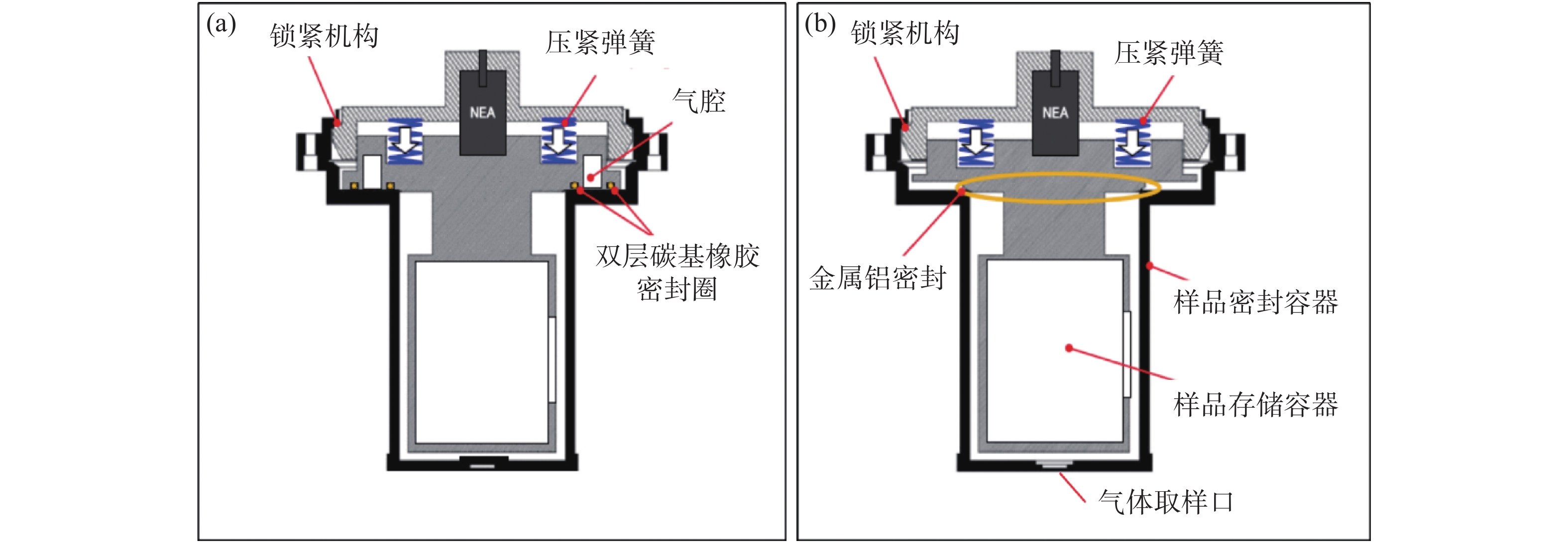
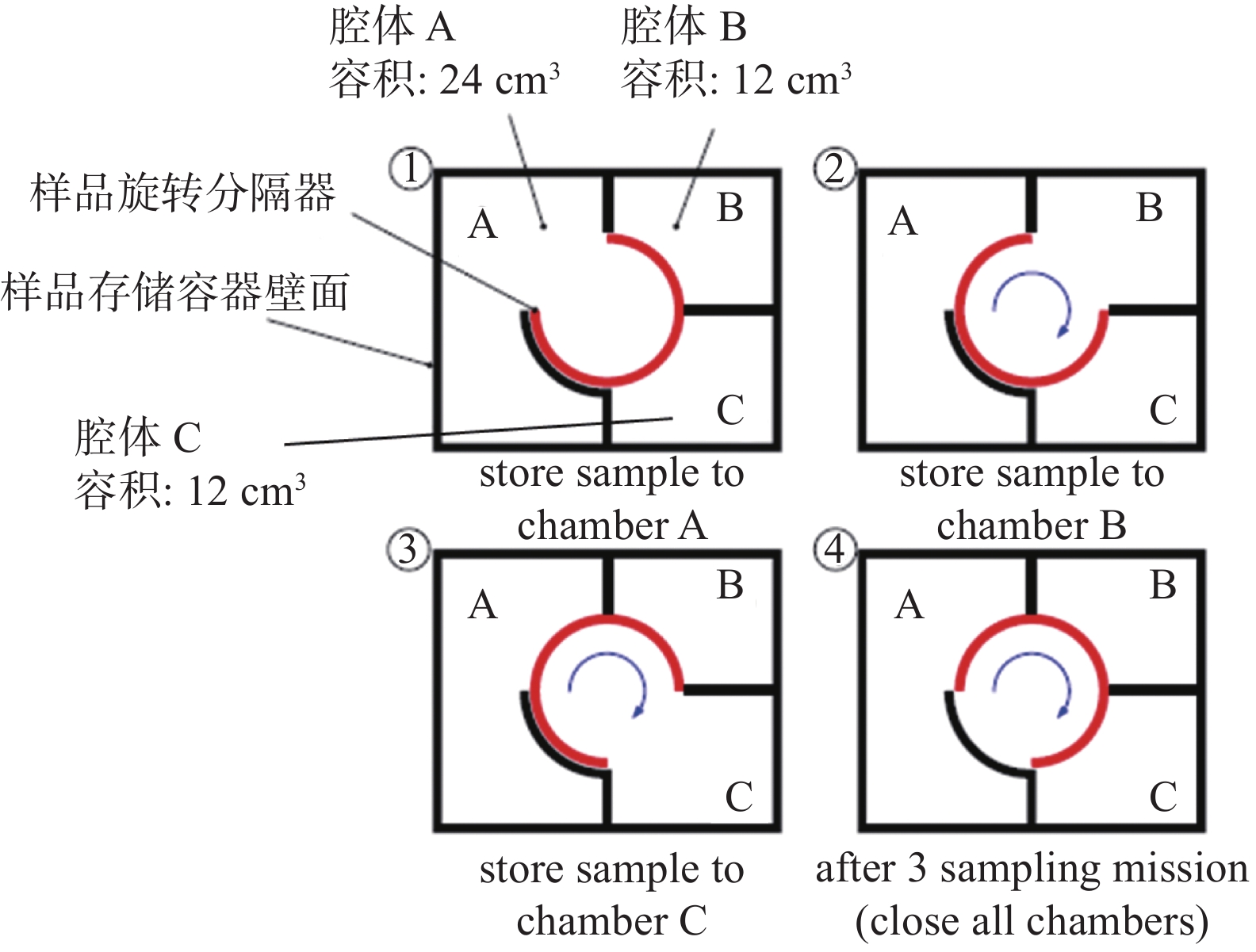
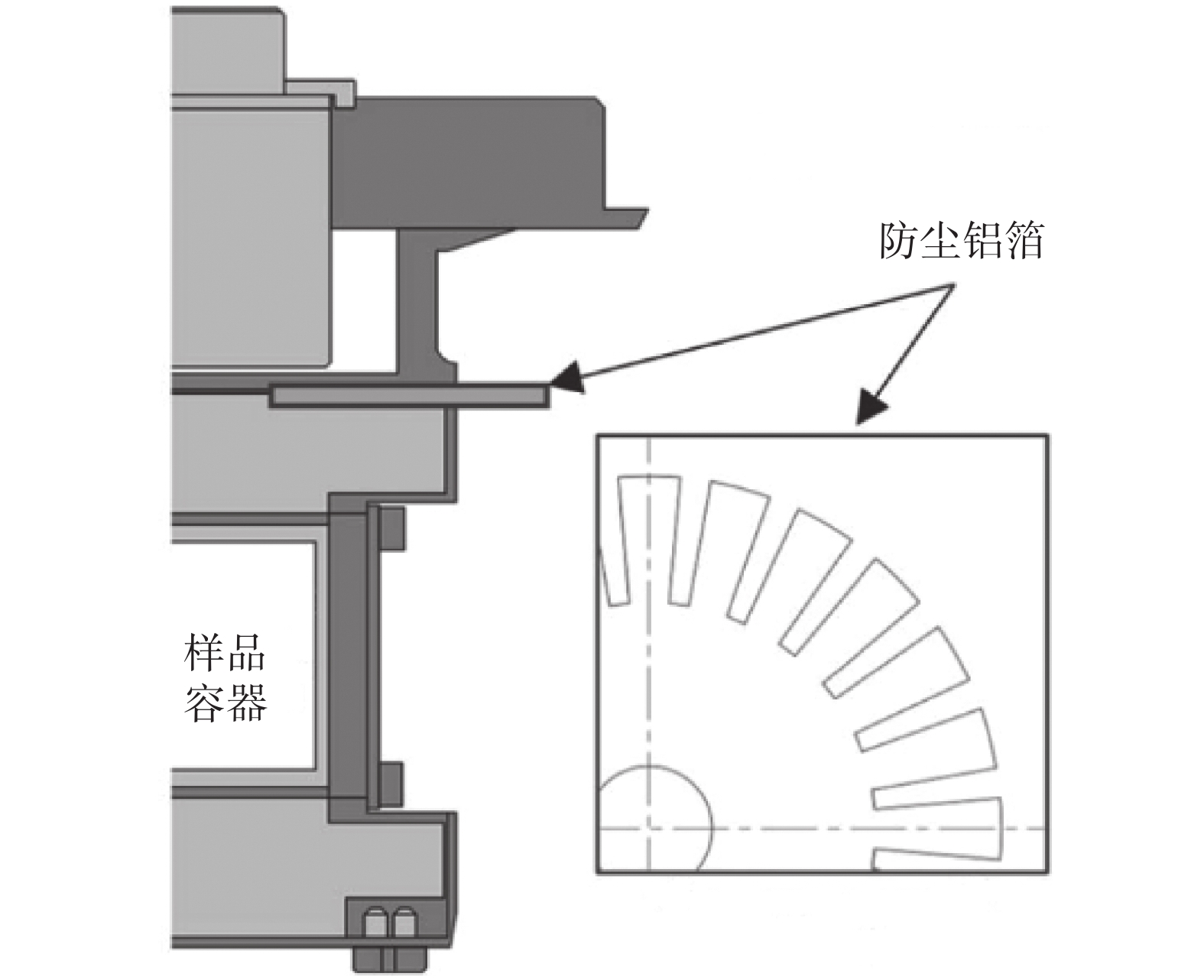
两次任务的密封装置相似,均由锁紧机构、压紧弹簧、密封结构、样品密封容器和样品存储容器几部分组成,内部结构如图19所示。两次任务中样品存储容积相同,均为48 cm3,理论上可盛装100 mg的样品,包括数个直径为毫米级的颗粒样品。“隼鸟号”样品存储容器有两个样品腔,分别盛装两个采样地点的地表样品,“隼鸟2号”升级为三个样品腔,盛装两份地表样品和一份地下样品。“隼鸟2号” 样品存储容器内部布局如图20所示,单向旋转作动器(NEA)驱动圆柱形分隔器旋转,使其开口指向不同的样品收集腔,完成A、B、C三个腔体样品收集,完成收集后,收集腔关闭。为了避免样品卡滞旋转分隔器,分隔器和隔板之间留有间隙,细小颗粒存在混合的可能性,因此细小颗粒的特性代表了小行星表面的全局特征。“隼鸟号”的密封结构为双层碳基橡胶密封圈,容器在返回地球的过程中发生泄漏,压力升至5 KPa[47]。“隼鸟2号”星壤中含有挥发性成分,因此采用漏率更低的金属密封。金属铝材料的密封容器刀口插入铝合金盖体内,提高了漏率的同时避免了橡胶圈引入的有机或无机挥发物污染,试验漏率约为1×10−8 Pa·m3/s[48]。“隼鸟2号”密封装置设计了除尘结构,如图21所示。防尘铝箔直径略大于密封容器内径,当推杆机构将存储容器推入密封容器时,在密封容器侧壁的阻挡下,防尘铝箔弯曲,刮去密封面附着的星壤颗粒。“隼鸟2号”增加了气体样品收集功能,密封容器底面中心厚度减薄,设置直径约1 mm的气体取样口,如图19(b)所示。样品密封容器返回地面后,用钨针刺穿气体取样口,收集容器内样品释放的气体,用于后续气体成分分析[49-52]。
-
“奥西里斯”(OSIRIS-REx)号是美国发射的首个小行星采样返回探测器,探测目标为B类碳质球状小行星Bennu[53-54],表面矿物质由碳和有机物等不具有挥发性的物质组成,表面风化层为细小颗粒,平均粒径小于10 mm[55],表面不含有对探测器产生影响的悬浮粉尘[56]。
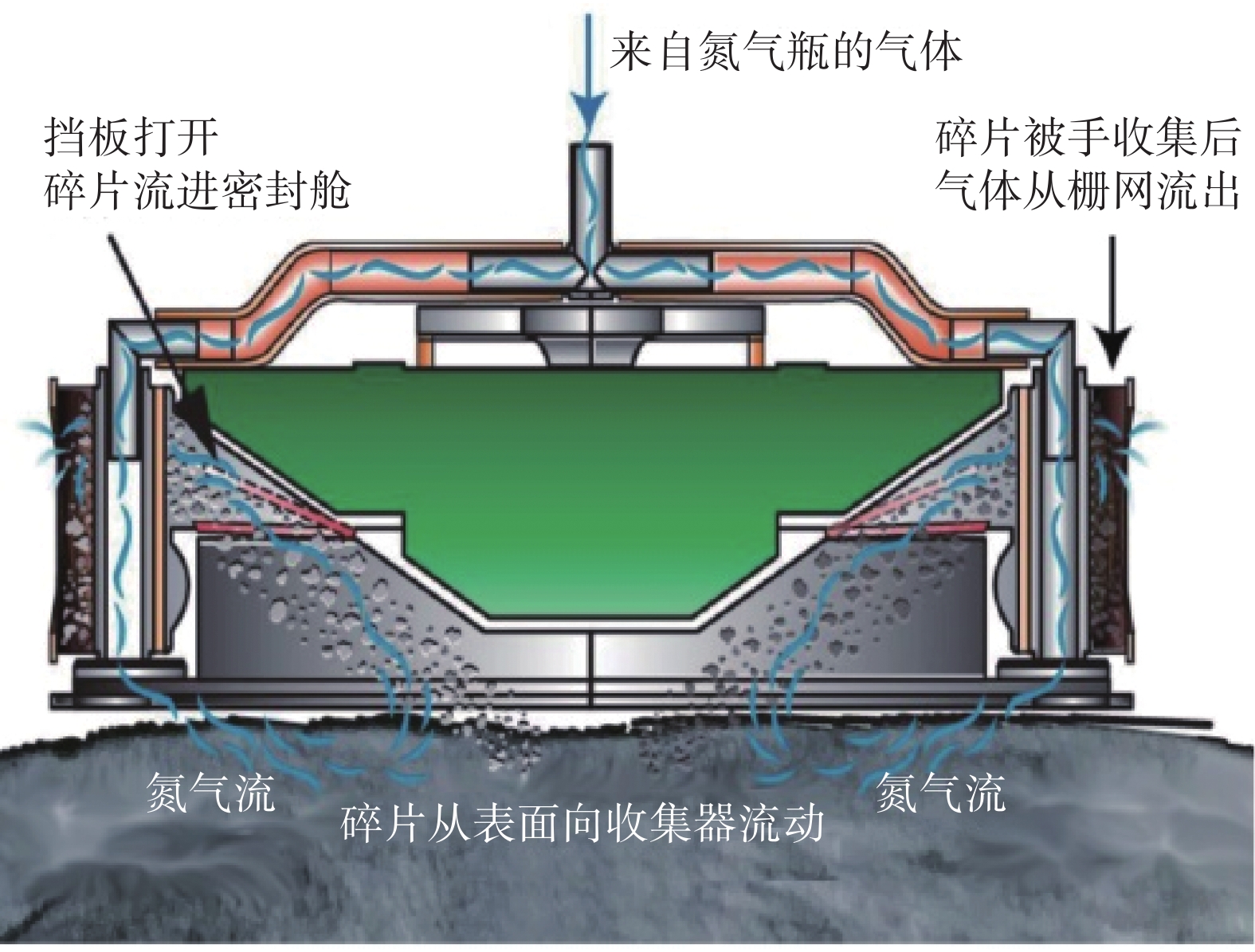
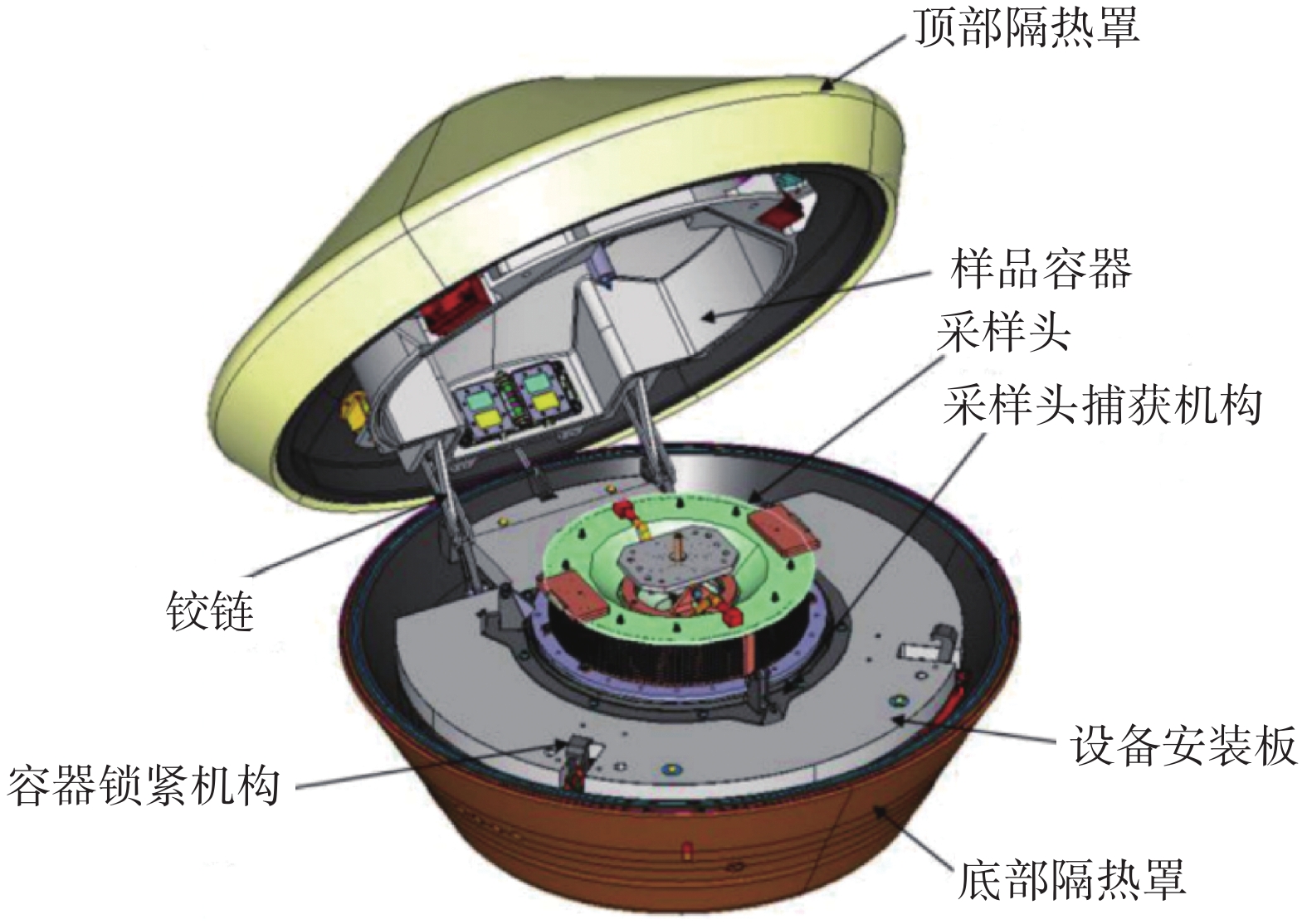
“奥西里斯”号探测器的采样方式为“一触即离”式采样。采样时探测器逐渐下落,在距离小行星表面几米高度时,采样头与小行星表面接触。氮气瓶喷射高纯氮气激发表面岩石和粉尘使表面碎屑流体化,气体携带表面样品颗粒打开聚酯薄膜柔性挡板流入环形采样头中,气体从采样头四周栅网流出,样品被阻隔于采样头内部。当气体流量小于某个设定值时,柔性挡板关闭,样品保留在采样头内部。气吹采样过程持续约5 s,采集样品直径最高可达20 mm,采样头工作示意图如22所示[57]。采样完成后,“奥西里斯”号探测器通过比较采样前后探测器旋转时角动量的变化测量样品质量。当采样量超过60 g时,机械臂将采样头放回位于返回器中心的样品容器内[58],爆炸螺栓断开采样头和机械臂之间的连接后关闭返回舱,完成样品收集密封[59-60]。为了保证采样成功,“奥西里斯”携带3个独立的氮气瓶,可进行3次采样尝试。
为了降低任务成本和风险,“奥西里斯”号样品容器的结构和密封方式延续了“星尘号”的设计,与返回舱的相对位置和结构如图23所示[61]。
2020年“奥西里斯”号完成采样后,头部摄像机拍摄图像显示,采样机构收集样品数量远大于目标采样量,导致用于封装样品的聚酯薄膜瓣被数块大石块揳开,航天器拍摄了整个泄漏过程。为了避免损失更多样品,NASA略去样品称重过程,直接将样品带回地球。
-
火星表面引力为地球引力的38%,探测器可降落并附着于表面完成采样和封装。火星表面地质结构与月球相似,覆盖了数米厚的风化层,风化层主要为红色细粒和角砾碎屑,因此火星的采样方式主要为钻取采样,既能对古早样品进行采集分析,又能保证样品的层理信息。由于火星星壤主要成分与地球相似,含有氧化铁、镁硫酸盐、氧化铁、碳酸盐等物质,并且水手9号红外探测证实,火星表面有冰或风化的含水矿物,具有一定挥发性,因此,在返回地球给过程中应对火星样品真空密封,避免挥发性物质损失,影响后续成分分析。
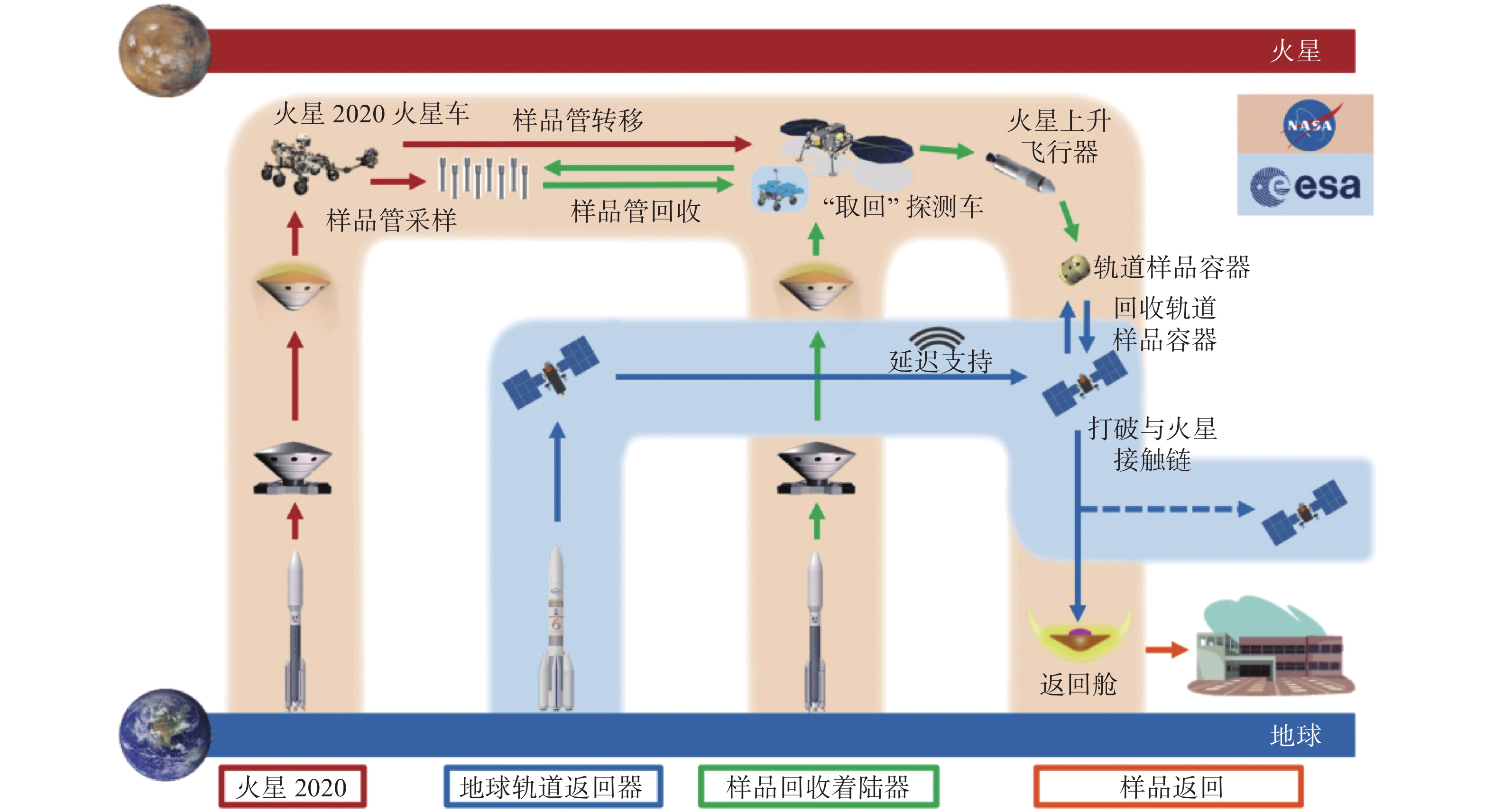
美国于2020年开展火星样品的采样返回任务——“火星样品返回计划(Mars Sample Return, MSR)” 。该计划不是一次性的采样任务,而是由一系列任务组成的探测工程,整个工程分为三个阶段:首先是采样阶段。NASA发射“火星 2020(Mars 2020)”号探测器,通过携带的“毅力号”(Persistence)火星车对多个地点进行钻取采样,同一地点样品独立密封于样品管中,临时存储在火星表面。第二阶段是将样品转移至低火星轨道。NASA在第二阶段将发射两个航天器,分别为“样品回收着陆器(Sample Retrieval Lander, SRL)”和“地球轨道返回器(Earth Return Orbiter, ERO)”。样品回收着陆器携带火星上升火箭(Mars Ascent Vehicle, MAV)、样品收集火星车(Fetch Rover, FR)和轨道样品容器(Orbiting Sample canister, OS)。样品收集火星车着陆于火星,收集“毅力号”留在火星表面的样品管,并将样品管转运至轨道样品容器内。轨道样品容器随后通过火星上升火箭发送至低火星轨道。第三阶段携带样品返回地球。地球轨道返回器捕获轨道样品容器后,对其进行密封和杀菌后由返回舱携带返回地球[62-65]。“火星样品返回计划” 的具体任务步骤如图24所示[66]。
-
“火星样品返回计划”共计划收集43份样品,其中5份样品为不同采样进程中产生的蒸汽沉积和颗粒污染物,用于监测火星车运动对环境污染的变化,其余38份样品为不同地点的岩石和风化层土壤。每份样品均单独存储和密封在无菌样品管中,既完全保留了当地的样品特性,又避免了不同地区样品的交叉污染[67-68]。
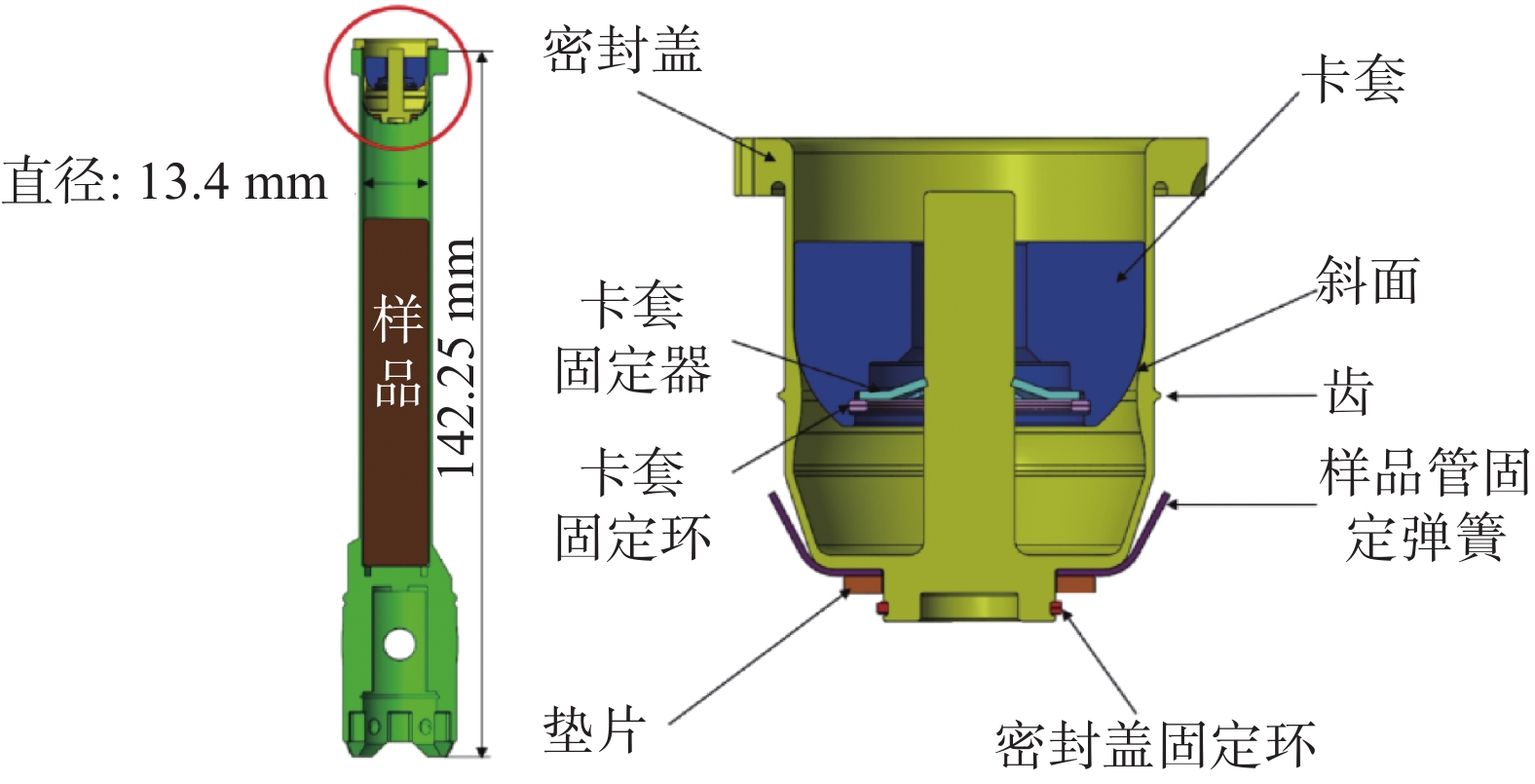
样品管如图25所示,为圆柱形结构,尺寸为:Φ25 mm×140 mm,样品盛装量大于15 g。主体材料为钛合金,内表面镀TiN层防止有机污染物吸附,外表面为氧化铝涂层以提高热控性能,使样品管在火星表面时,内部样品始终处于低温。每个样品管壁均刻有编号,便于科学家研究返回后的火星样品[65]。
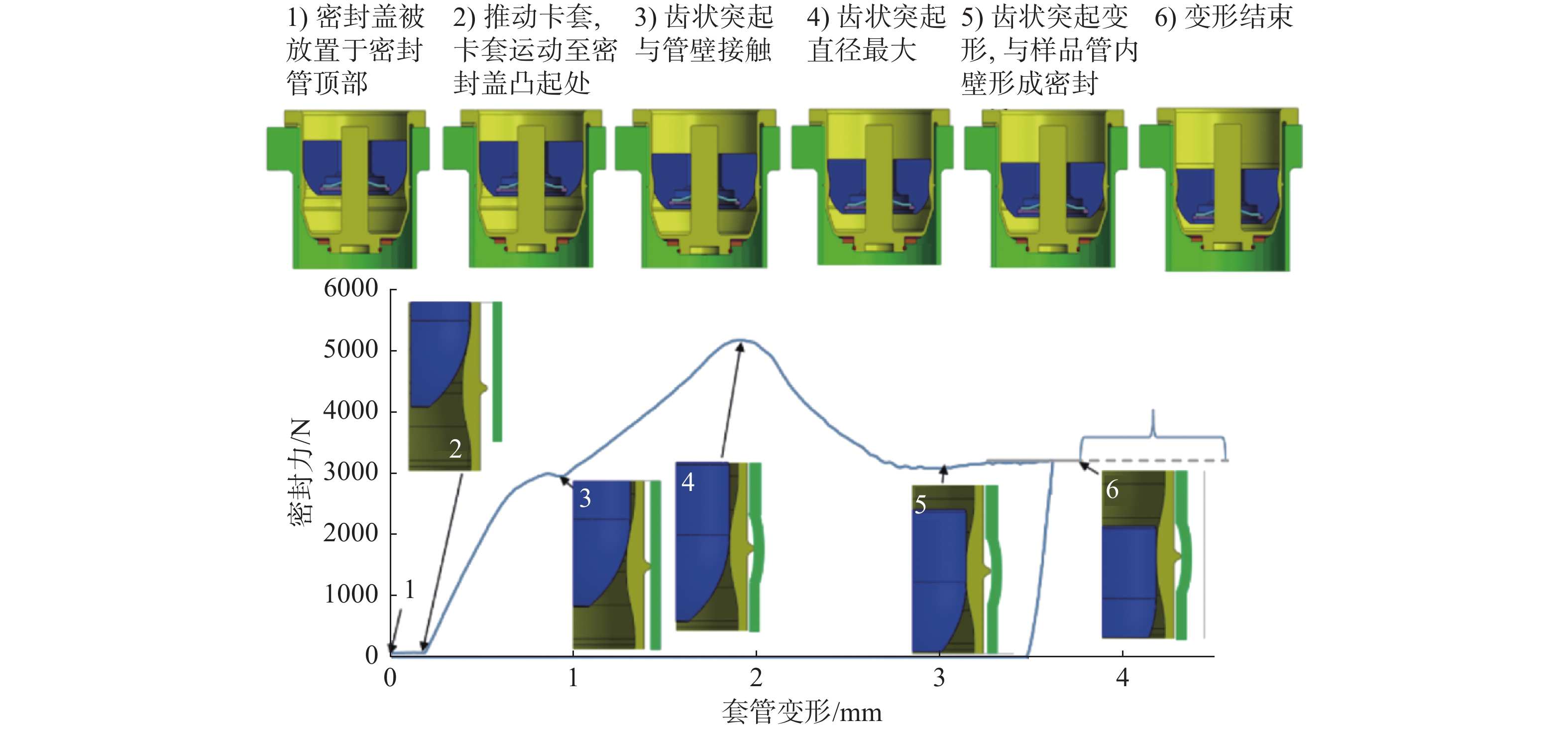
由于钻头在取样或放样过程中磨损密封面,且样品粉尘污染密封面,样品管密封结构具有一定容尘能力;样品密封后至少在火星表面存储四年,样品管在经受火星表面热力循环和沙尘环境后密封状态保持不变;样品管在返回地球的过程中经受火星表面发射、地球返回等振动和冲击环境影响后,密封状态保持不变。基于上述要求,NASA提出了扭矩密封塞、冷焊密封、弹性密封、钎焊密封、形状记忆合金密封等多种密封方案[69-70]。通过大量试验和仿真分析,并结合火星采样的实际需求,最终选择了Kristopher等提出的密封结构[71],如图26所示,设计了由密封盖、卡套、卡套固定器、垫片、卡套固定环、样品管固定弹簧、密封盖固定环组成的密封组件。
盛装样品后,密封组件放入样品管内,样品管固定弹簧收缩防止密封组件径向位移。随后密封推杆推动卡套使其沿着密封盖向下运动,卡套斜面挤压密封盖内凸起使密封盖直径增加,外部齿状结构直径也随之增加。当齿状结构外径增加至大于样品管内径时,齿状结构与样品管内壁挤压。由于齿状结构外表面镀金,在挤压时部分齿状结构刃入样品管内壁中产生挤压变形,表面镀金填充入缝隙,密封组件与样品管之间形成真空密封结构。密封结构的形成过程、该过程中密封力的变化以及密封盖的变形量如图27所示。
火星表面大气压为500~700 Pa,密封后样品管内部压力与火星表面相同。当样品管返回地球途中,经历火星气压、超高真空环境和地球大气压等多种外压环境,样品管的密封结构需要经历正压和负压两种环境下的漏率测试。NASA对样品管的密封结构进行多种温度、灰尘以及不同外压环境的测试,密封漏率优于1×10−11 Pa·m3/s。
-
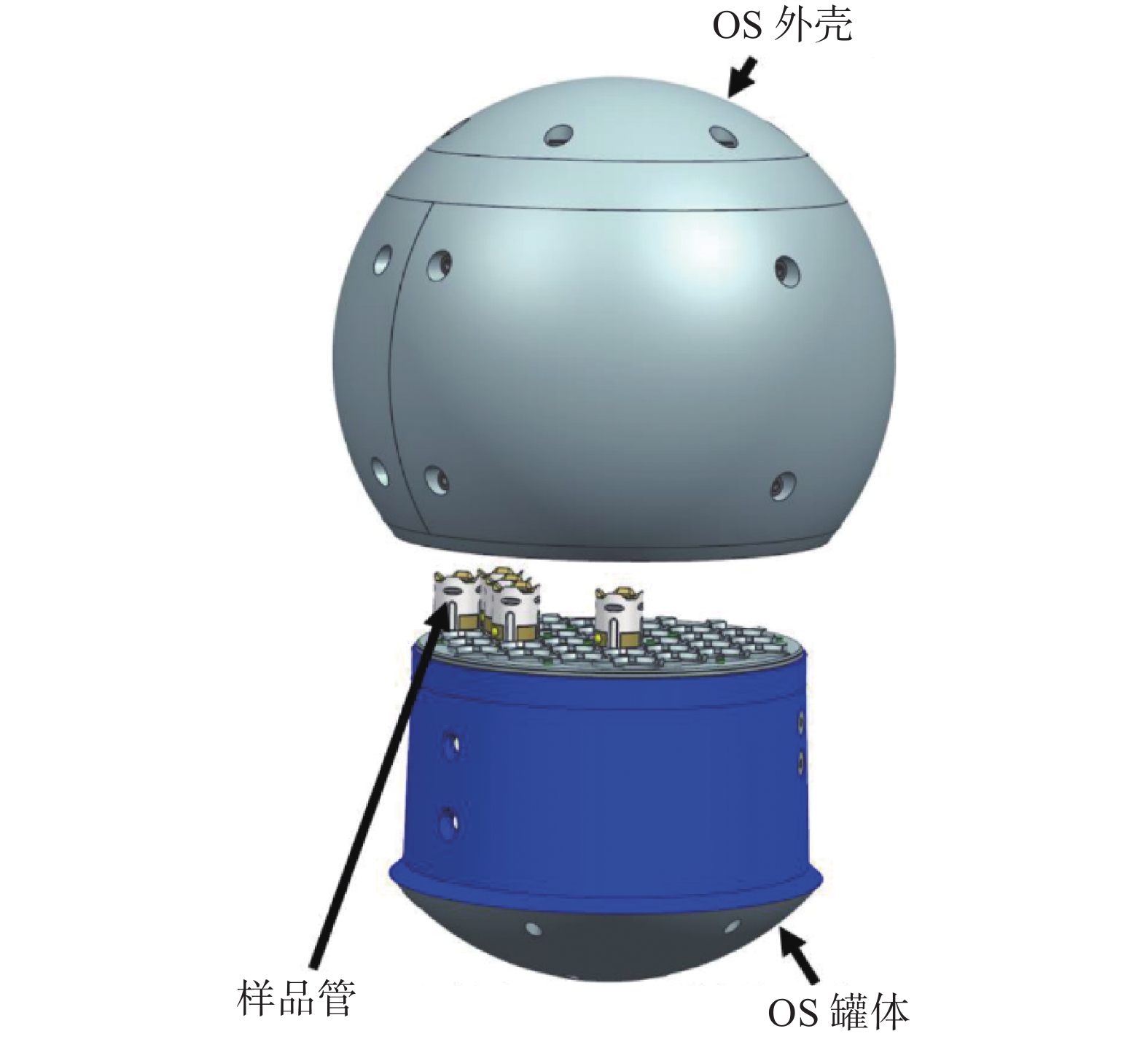
轨道样品容器(OS)的主要功能为收集和存储样品管,并将其携带至低火星轨道。OS的组成和结构如图28所示,主要由OS外壳和OS罐体组成。OS罐体底部设有2个气体样品收集区域,与火星大气通过两个串联的电磁阀连通,总共可储存140 ml火星大气样品。OS外壳集成了超高频跟踪信标,在发射至低火星轨道后,地球返回器可通过信标装置检测并捕获OS。OS外壳内设有轴向定位壳杆可与罐体集成的挠爪机构配合,完成OS的锁紧和内部样品管的固定,在火星发射、地球巡航、返回地球和降落冲击时,保持OS和内部样品管结构完整[66]。
根据行星保护政策要求,火星的行星保护等级为Ⅴ级,是行星保护中的最高级。该政策要求与火星采样返回任务相关的密封容器和其他部件应当与火星环境“打破接触链”(Break the Chain of Contact, BTC),即所有返回地球的硬件都不能与火星环境直接接触。基于上述要求,需要将OS真空密封于一个外部不接触火星环境的容器中,且对接缝处进行消毒杀菌[72]。
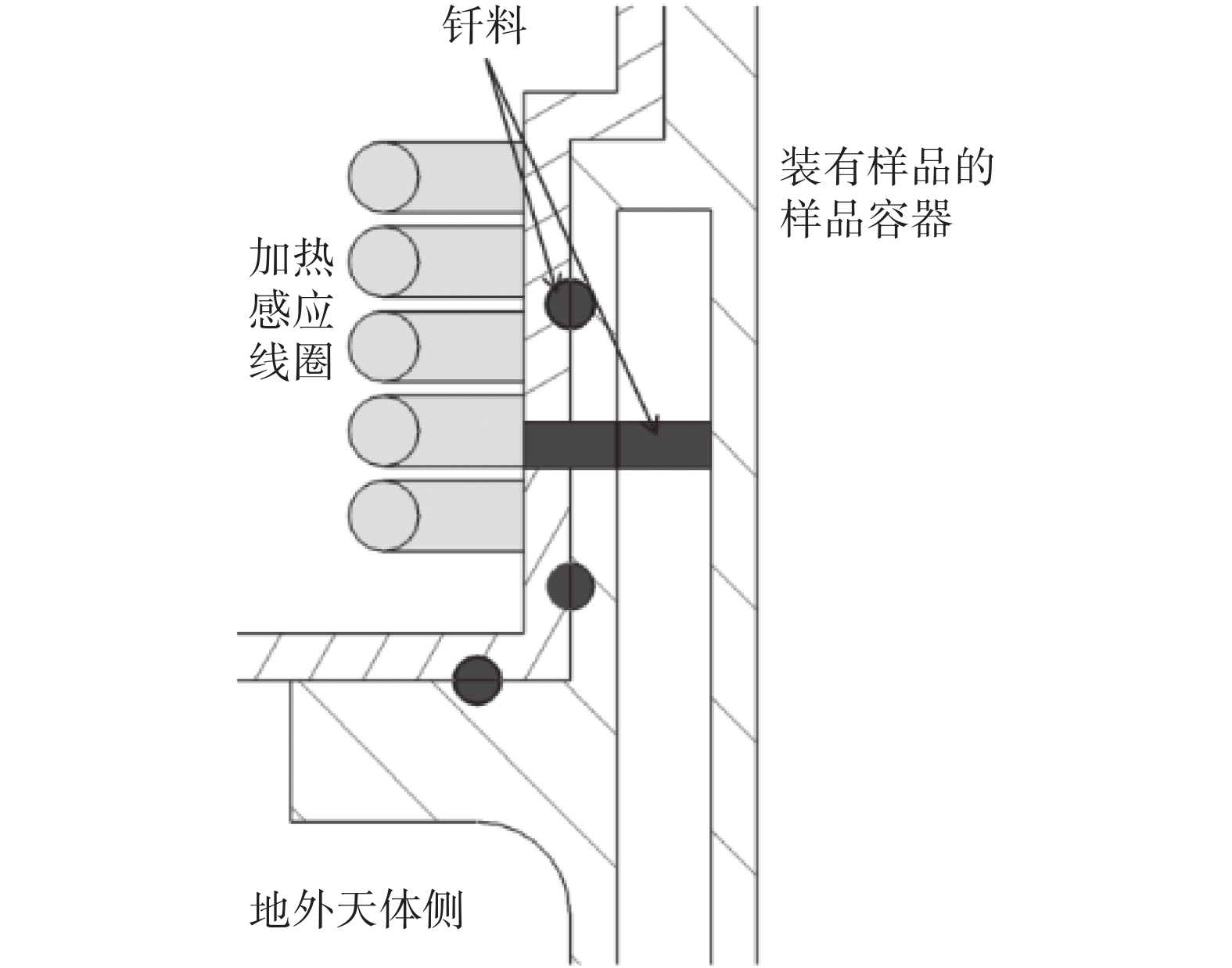
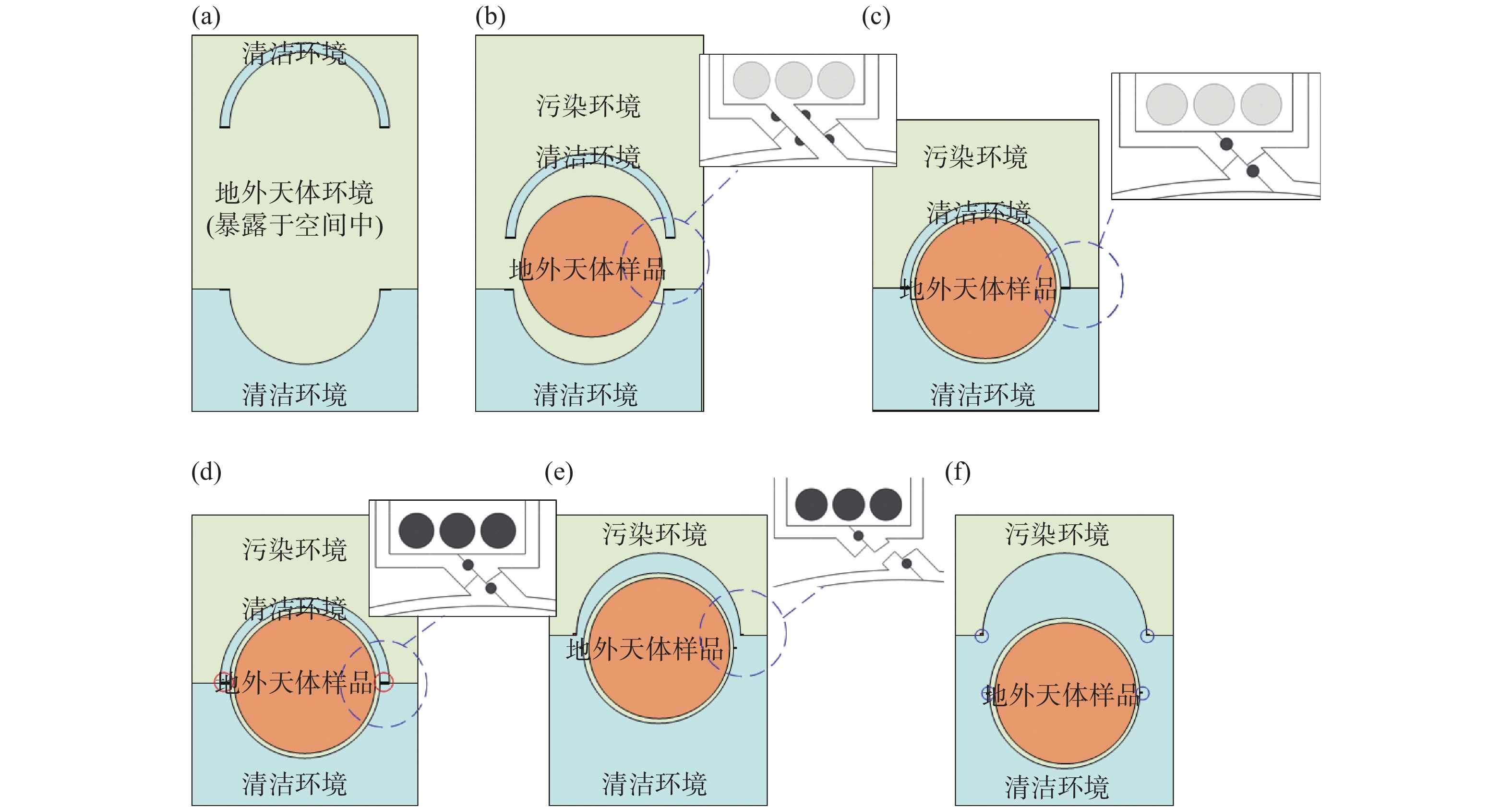
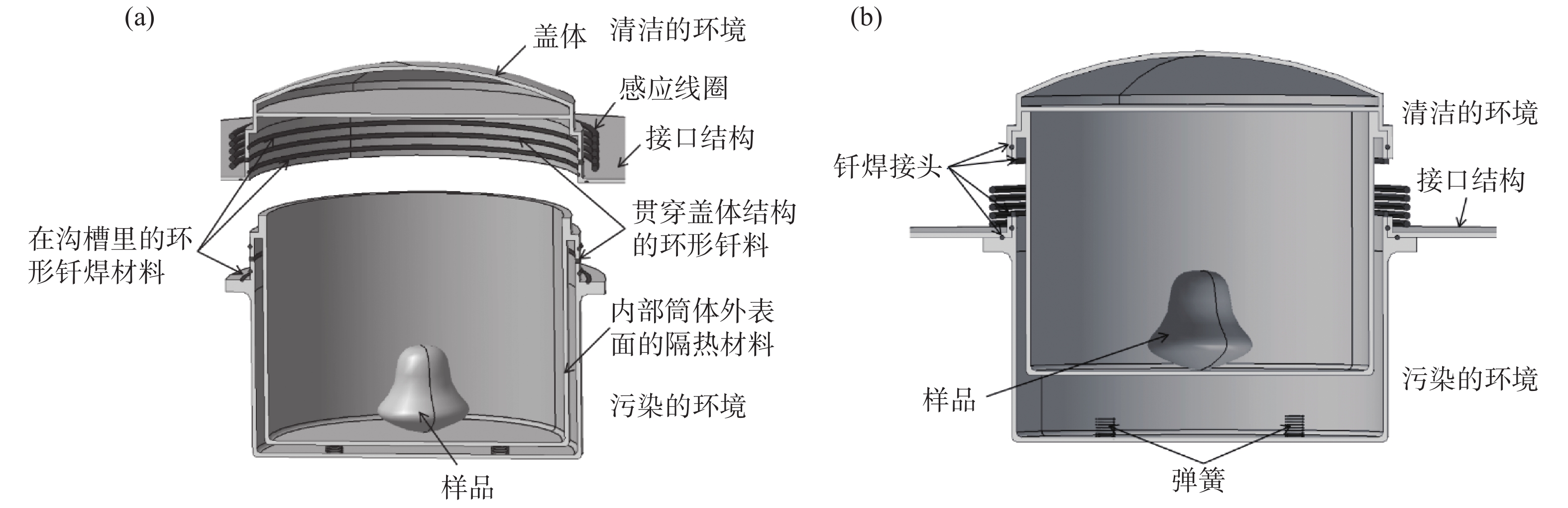
NASA提出爆炸焊接、钎焊或套袋等能够实现与火星接触面分离的密封方式[73],并且密封后对接缝处进行离子体、高温气体/电加热或其他表面处理方式进行生物灭菌。Yoseph Bar-Cohen等提出了“S3B”(Separation,Seaming,and Sealing using Brazing)形式的密封结构[74-75]。该结构为双层罐体感应钎焊密封,在满足密封漏率前提下,既能使OS与火星的接触面完全封存于密封容器内,又能高温加热样品密封容器,破坏容器表面和焊缝处的生物污染物[76]。样品密封容器设计为圆柱型,如图29(a)所示,由盖体、双层筒体、感应线圈和钎料等组成。内外筒体在地球上通过钎料焊接为一体,筒体之间为地球清洁环境。盖体与返回舱分隔板焊接为一体,盖体外表面不与火星环境接触。当样品盛装于容器后,推杆机构将筒体推入盖体中使其闭合。随后感应线圈加热钎料至熔点以上,图30中密封环(圆形区域)和分离环(矩形区域)在受热后处于熔融状态。在内筒体底部弹簧的作用下,内外筒从分离环处分离,如图29(b)所示。感应线圈停止加热后焊料凝固,盖体和内筒体钎焊形成一个整体,完成样品的钎焊密封。直接接触火星环境的外筒体与分隔板焊接,不随返回舱返回地球,返回舱将盖体和内筒体包裹的OS运送回地球。由于盖体和内筒体外侧始终未暴露于火星环境,外表面不被火星环境污染,阻断了火星生物的传染路径。
为了盛装更多样品,轨道样品容器设计为球形,Xiaoqi Bao等也将密封容器设计为球形[77]。具体的封装结构和密封过程与圆柱形相似,工作流程如图31所示。盖体(图中下半半圆)与航天器焊接为一体,盖体外壁不与火星环境接触。筒体为两个半圆形容器焊接在一起的双层结构。当样品收集完成后,盖体与筒体配合,启动钎焊加热程序,加热钎料至熔化温度,内外筒体分离。冷却后内筒体与盖体焊接于一体,外筒体焊接于航天器上。
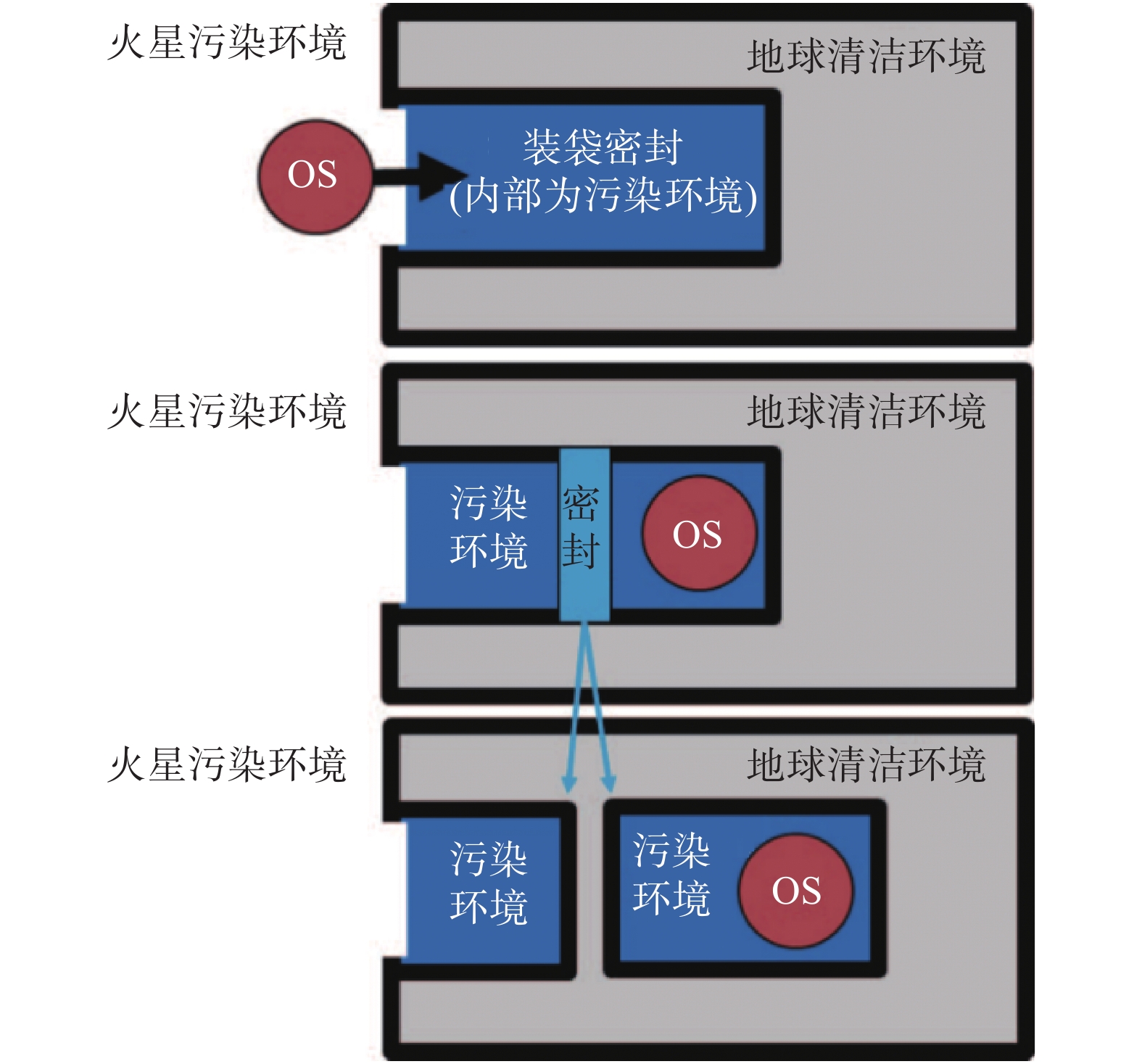
Yuki等提出了套袋密封的结构[78],基本原理是将OS包裹于聚合物样品袋内,与地球清洁环境之间形成屏障,避免OS与地球环境直接接触。套袋密封的具体流程如图32所示,当OS被放入样品袋后,关闭并加热样品袋入口,密封OS的同时完成接缝处的加热灭菌。待接缝冷却后,从接缝处切开样品袋,完成OS的封装和样品袋的分离。套袋密封具有轻便、灵活的特点,能够与多种形状的样品容器相匹配。
目前,能够实现BTC功能的密封结构仍在研制和试验中,最终“火星样品返回计划”选用的密封结构尚未形成定论。
-
面向未来复杂的飞行环境和采样星球的不确定性,地外天体采样密封技术具有以下发展趋势:
(1)根据地外天体特点选择合适的采样密封方式
随着探测技术的发展,未来势必会前往距离更远、表面环境更为特殊、采样难度更大的地外天体实施星壤样品采样返回工作,星壤样品的不确定性成为影响采样密封技术的主要因素。未来采样密封技术在选取时应在综合考虑飞行时间、表面环境、引力大小、样品成分等因素的基础上,选择与目标星体相匹配的采样密封方式。针对飞行时间长的天体,应选用密封寿命更长、可靠性更高、环境耐受性更好的密封方式;针对表面风化层颗粒小或大气中尘埃丰富的天体,选择具有容尘性更好的密封方式或设计可靠的防尘结构,避免星尘影响密封效果;针对表面微重力或零重力的天体,在采样时探测器应选择不接触表面的悬停方式,采样头与天体星壤单点接触,避免采样活动影响天体的运行轨迹;针对表面引力较大且探测器可附着的天体,可选择传统的探测器着陆后钻取或铲取的采样方式;针对天体表面星壤中含挥发性成分的情况,应在初步分析成分的基础上,有针对性地选择可保留挥发成分的真空密封材料和密封结构,并设计气体样品提取接口,便于返回地球后第一时间分析气体样品;针对表面星壤不含有挥发性成分的天体,既可以选择真空密封结构,也可以仅对星壤接触的气体进行过滤,避免水、氧和杂质颗粒污染样品。
(2)开发更为可靠的防尘方式
纵观以往成功实施的样品密封任务可以看出,月尘对样品容器的密封效果有很大的影响。苏联的Luna系列和美国的Apollo系列样品容器的密封结构均遭到了月尘的破坏,密封容器在返回地球后内部压力均升至一个大气压,容器发生泄漏。为了保证星壤样品能够在返回地球后保持原样,准确地表征地外天体特性,未来应重点关注密封容器的防尘设计。在Apollo系列使用过的覆盖防尘的基础上,开发喷吹除尘、电泳除尘、静电除尘、摩擦除尘等新型除尘结构,减少星壤样品粉尘对密封面的影响,提升密封可靠性。
(3)开发能够适应远距离、长时间飞行的样品密封结构。
随着未来先进通讯技术和推进技术的不断发展,中国的深空探测也逐渐向小行星、火星、木星、彗星等其他距离地球更远、返回飞行时间更长的天体转变,对密封技术的需求也从“封得住”向“封的久”转变,对密封材料环境适应性和密封时间的要求更高。目前,中国月球样品使用的密封方式是传统的橡胶密封圈和铟银合金相结合的冗余密封方式,橡胶圈易老化且低温、辐射环境适应性差,铟银合金具有长期密封过程中会蠕变的特点,使其难以满足更高的密封要求。未来应在充分考虑地外天体特性、飞行环境影响、返回时间跨度的基础上,研发新型密封结构、开发新型密封材料、建立基于不同重力环境下的密封模型,并对其进行理论分析和试验验证,满足未来深空探测任务中样品密封的要求。
(4)研究具有行星保护功能的灭菌方式或建立生物屏障。
中国在行星保护方面的研究尚处于起步阶段,且未对存在生命的天体进行采样返回操作,现有的地外天体采样密封容器不涉及行星保护相关设计。未来中国的深空探测任务可能会涉及火星、木卫二等可能存在生命的地外天体,在返回容器的设计中需要考虑行星保护设计,在保护样品不被地球大气污染的同时,避免样品在运输途中污染月球和地球环境。
(5)开发具有保温功能的密封容器
随着人类对可持续发展的迫切需求,地外天体表面水资源的分布是行星探测的重要科学目标之一,天体表面水冰/干冰的采样返回对研究地外天体宜居性具有重大意义。目前已探测到月球极区和火星部分地区含有大量水冰/干冰,如何将星壤样品中的水冰/干冰在不解冻的情况下保持原样带回,成为了亟待解决的问题。未来应开发具有保温功能的样品密封容器,在返回地球的过程中样品含有的水始终保持固态原样,星壤的成分和比例保持不变,对研究天体星壤的物质组成、资源分布及存在形式有重要意义。
-
本文阐述了国内外地外天体采样密封技术的发展脉络,回顾了针对不同类型天体采取的采样和密封方式,通过对比可得到以下结论:
对于附着星体表面实施铲/钻采样的方式,优点为适用于引力大的天体,可在其表面进行多点多次采样,并能收集到地下一定深度的样品,返回地球后可对星壤的层理信息进行分析,但是缺点为探测器需要在星体表面着陆,搭载采样车、着陆装置、钻样机构、上升发动机等组件,探测器重量最重。由于钻/铲取样品会引起星壤尘埃在地表漂浮,相对应的密封容器在设计时应重点考虑密封面的防尘问题,避免星壤样品附着于密封面,造成容器泄露。
对于飞跃星体的采样方式,优点为适用于彗星等喷射地表样品的星体,可在不接触星体表面的情况下完成样品收集,缺点为仅能收集到微小颗粒样品,并且采样量较小。由于样品被气凝胶包裹,且不含有挥发性气体,对应的样品容器在设计时可不把密封作为设计重点,仅对样品进行防护,避免地球大气污染样品。
对于接触采样的方式,优点为适用于无法着陆的体积较小星体,且对星体表面地形要求低,缺点为采样量较小,且难以保证样品的层理信息。样品容器的设计难点为取样器与容器间的接口,在保证样品能够轻松进入容器的前提下,避免在后续转样过程中的损失。
在文章的最后对未来的发展趋势进行了展望,地外天体采样密封技术逐渐从近地天体单一环境采样密封向深空探测中复杂环境的采样密封转变。对存在生命迹象天体采样密封容器进行生物保护设计,对水冰/干冰采样的密封容器进行保温设计等。本文为中国未来小行星探测、火星探测、载人登月、月球极区探测等地外天体采样返回任务的设计提出了一条可行的探索路径,为地外天体采样密封容器的设计提供了新的发展思路。
地外天体样品采样密封技术进展与发展建议
The Technical Advance and Development Suggestions for Extraterrestrial Object Sampling and Sealing Technologies
-
摘要: 在回顾国内外地外天体样品采样密封技术发展状况的基础上,详细论述了地外天体特性与采样方式和密封容器的适配性设计,着重分析了样品密封技术的特点以及能够实现的漏率指标,深入剖析了包括防尘设计和生物灭菌在内的样品密封过程中的关键问题。最后展望了地外天体密封技术的发展趋势以及需要研究解决的技术问题,旨在为中国地外天体采样密封技术的发展提供参考。Abstract: Based on the review of extraterrestrial object sampling and sealing technologies, this paper elaborates adaptive design of extraterrestrial objects’ characteristics, sampling method, and sealing container. Then, sealing technology characteristics and leakage rate are analyzed respectively. Meanwhile, key issues during the sealing process, such as dustproof design and biological sterilization, are carefully researched. Finally, the prospects for the research and technology issues needed to be resolved are also analyzed, providing a reference for the development of extraterrestrial object sampling and sealing technology in China.
-
Key words:
- Extraterrestrial objects /
- Soil samples /
- Sampling /
- Sealing .
-

-
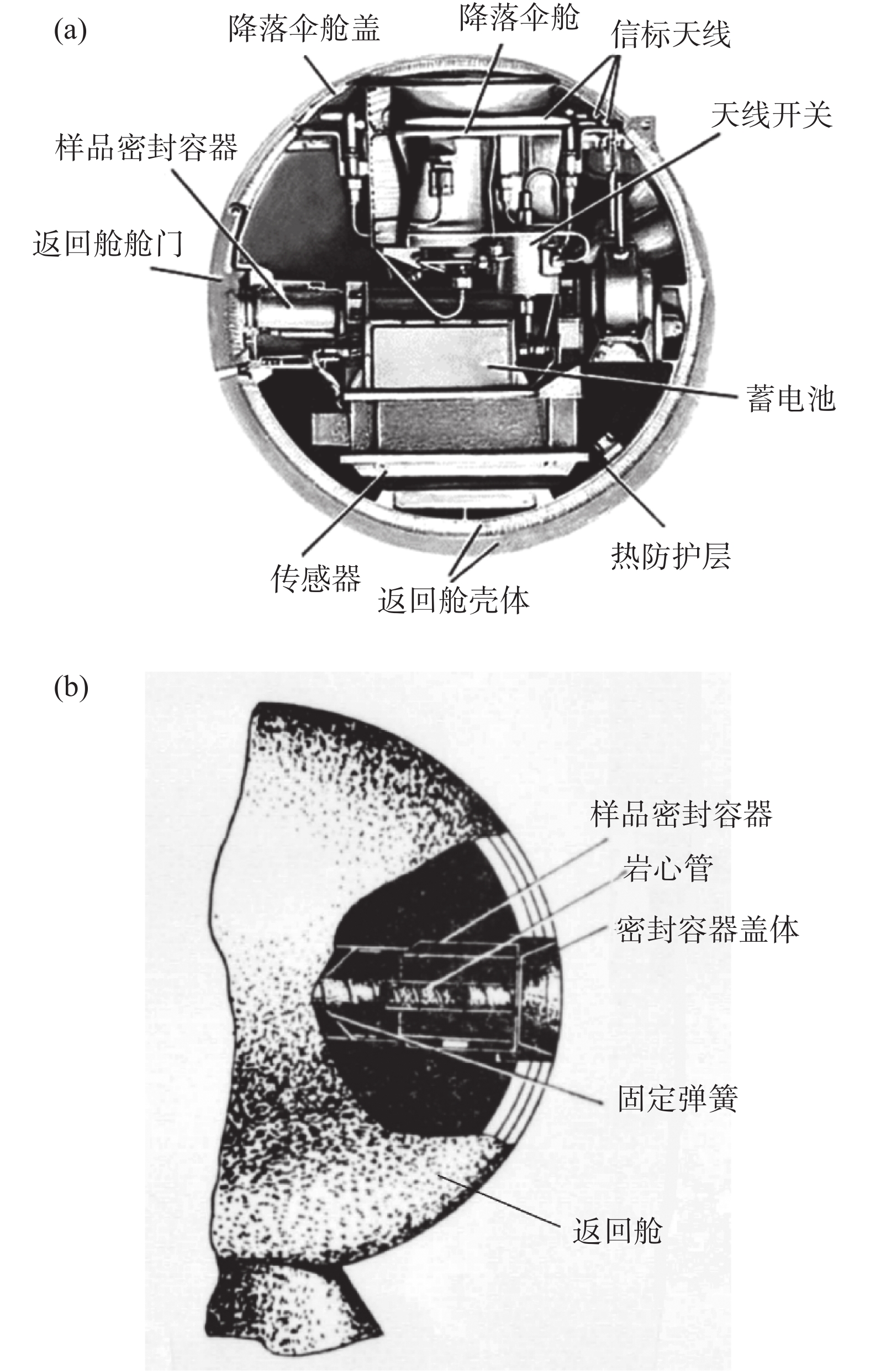
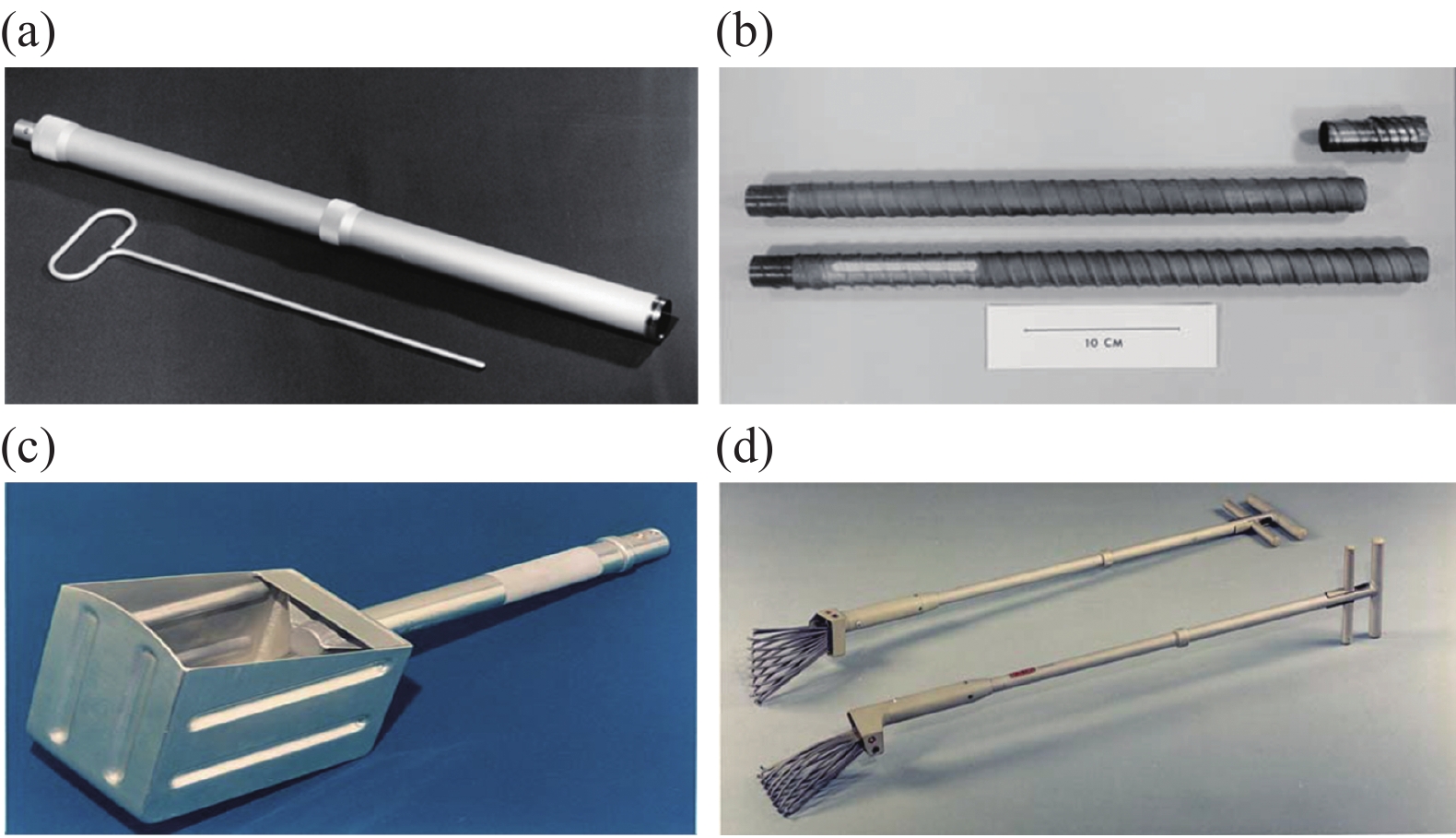
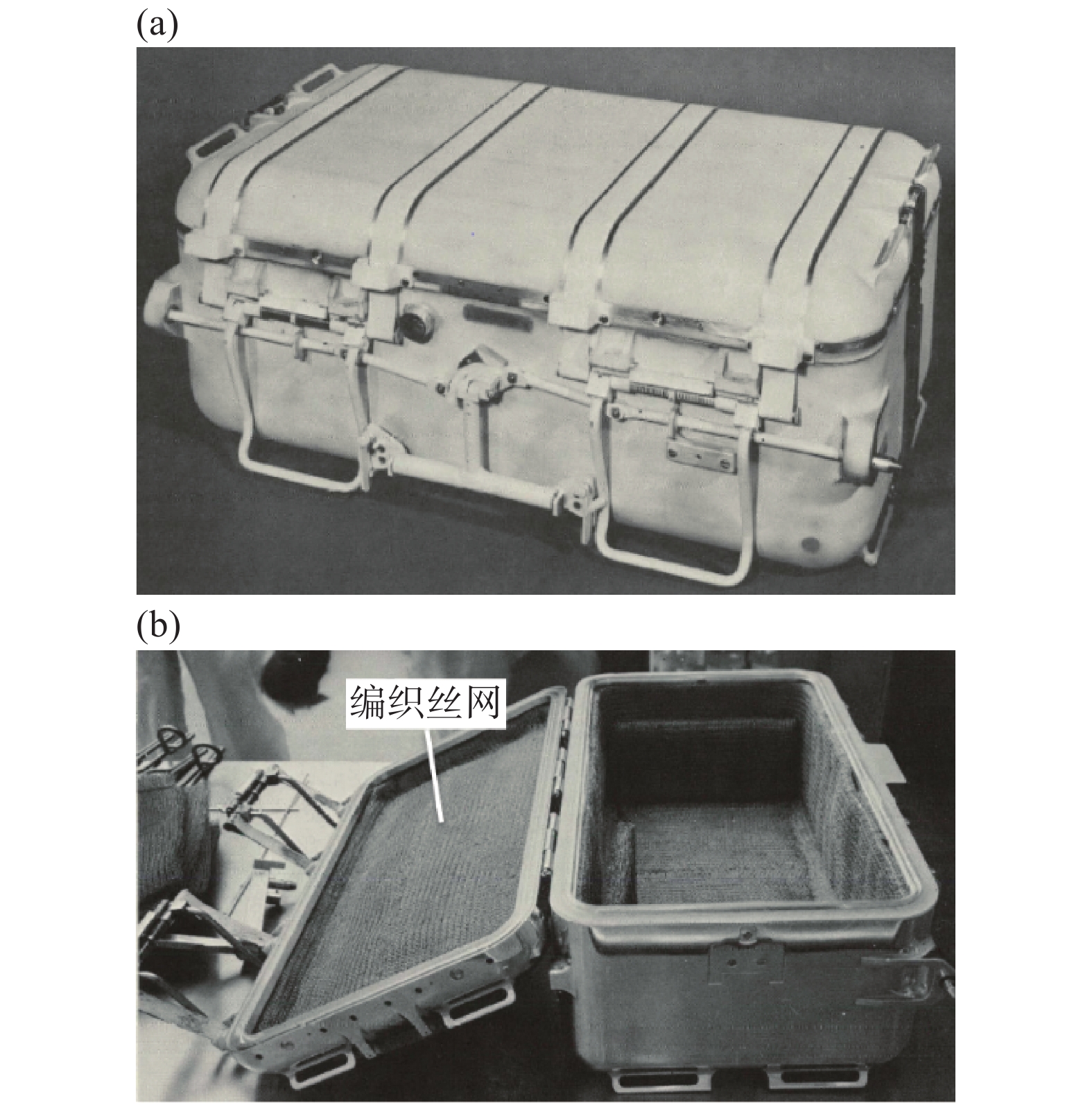
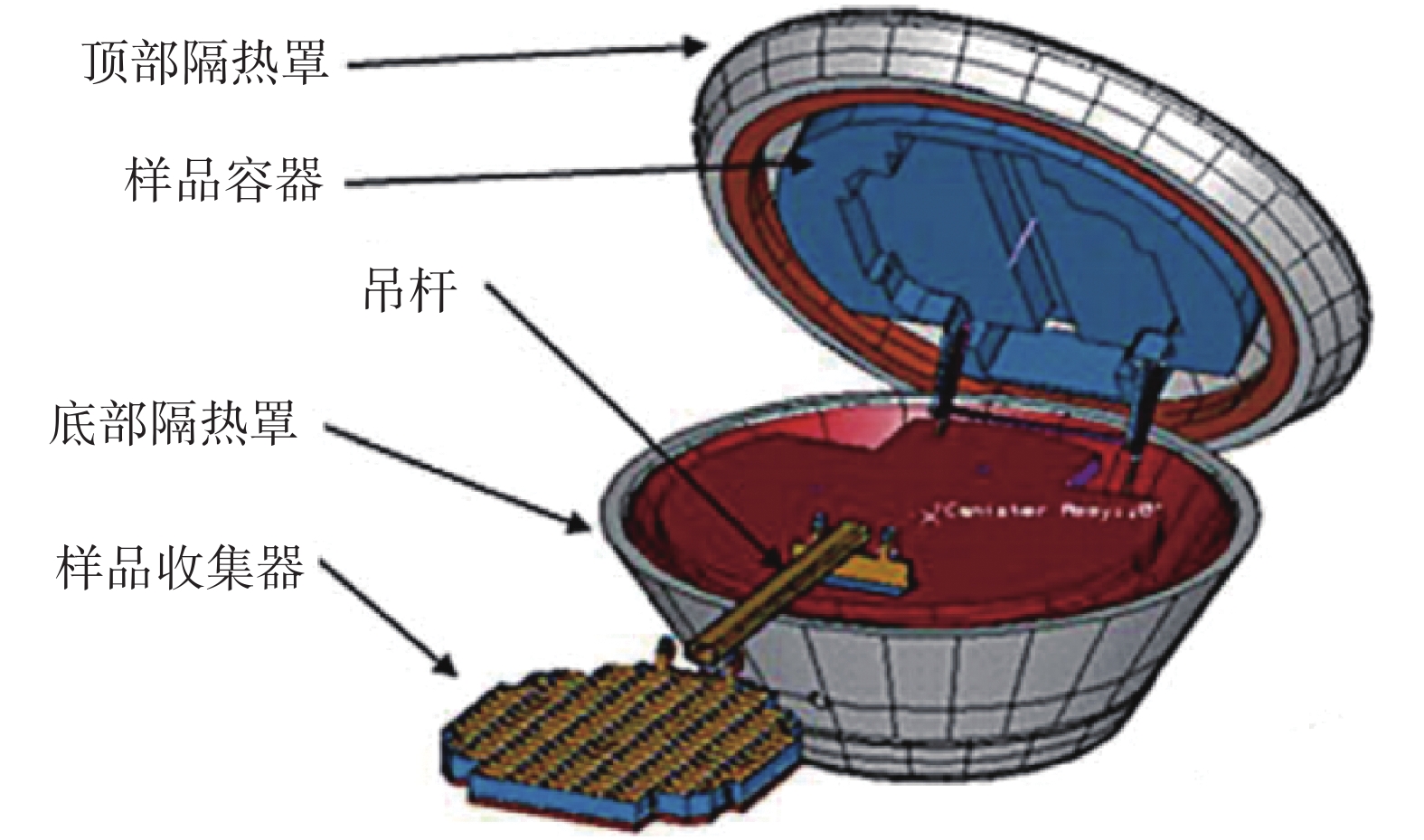
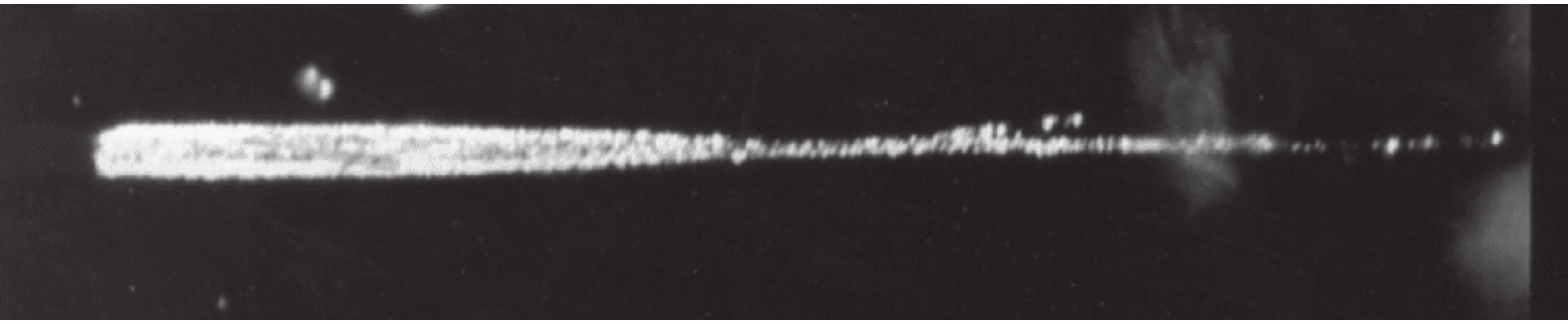
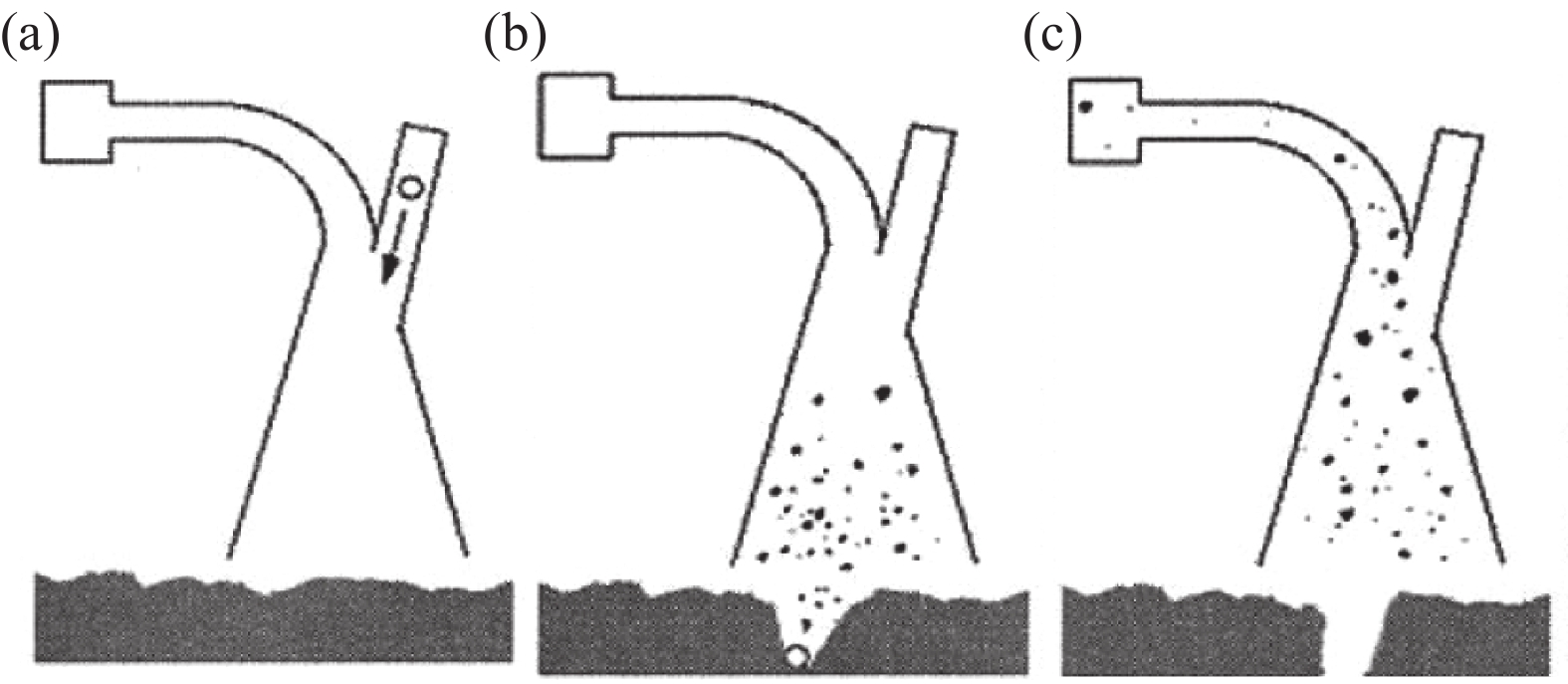
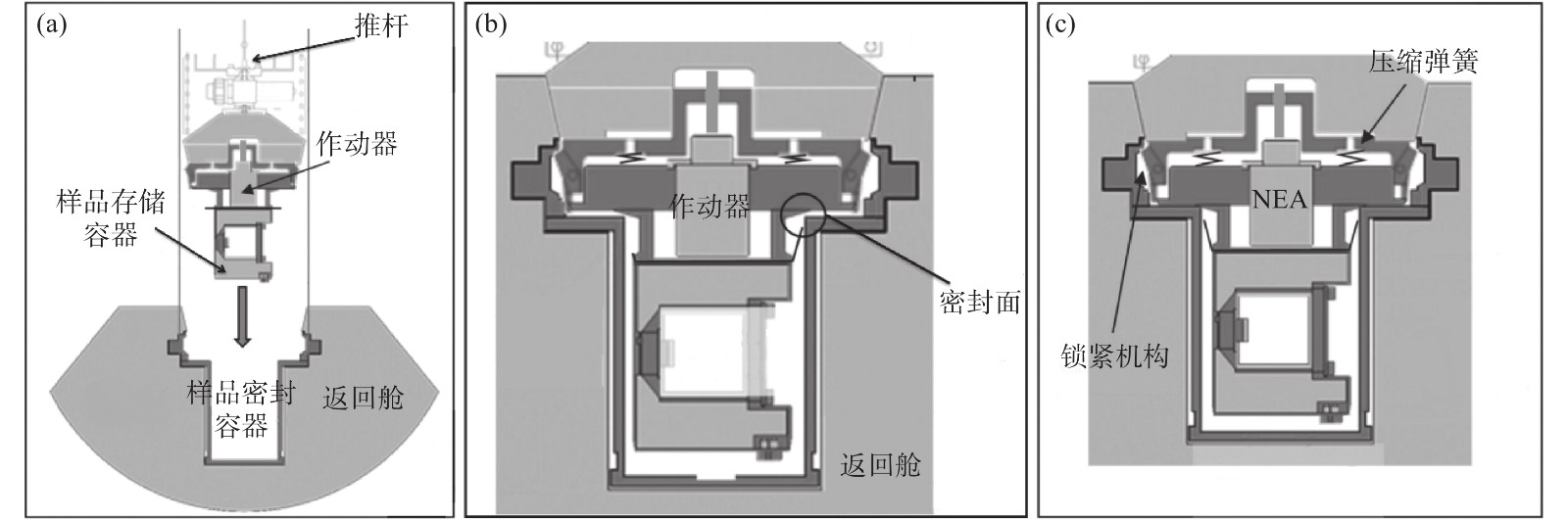
图 18 样品存储和密封容器工作流程图[44]。(a)存储容器被推入样品容器和返回舱内(b)存储容器与样品容器相连接(c)弹簧应力释放,弯曲的盖体与样品容器边缘挤压
Figure 18. Schematic diagram of the sample catcher and container of Hayabusa[44] (a) The sample catcher is transferred forward to the sample container and the re-entry capsule , (b) The sample catcher is combined with the sample container in place, (c) The curved-surface lid is thrusted on the edge of the sample container by release of the spring tension
-
[1] Beaty D W,Grady M M,Mcsween H Y. The potential science and engineering value of samples delivered to Earth by Mars sample return[J]. Meteoritics & Planetary Science,2019,54(3):667−671 [2] Cherkasov I I,Mikheev V V,Smorodinov M I,et al. 20 years of soviet investigation of lunar soils[J]. Soil Mechanics & Foundation Engineering,1986,23(6):241−244 [3] Tang J Y,Deng Z Q,Chen C B,et al. Review of planetary drilling & coring technologies oriented towards deep space exploration[J]. Journal of Astronautics,2017,38(6):555−565 (唐钧跃,邓宗全,陈崇斌,等. 面向深空探测的星球钻取采样技术综述[J]. 宇航学报,2017,38(6):555−565(in chinese) Tang J Y, Deng Z Q, Chen C B, et al. Review of planetary Drilling & Coring Technologies Oriented Towards Deep Space Exploration[J]. Journal of Astronautics, 2017, 38(6): 555-565 [4] Wang Y J,Zhao C X,Li D T,et al. Progress and development proposals of space dust detection[J]. Science and Technology Foresight,2022,1(1):38−50 (王永军,赵呈选,李得天,等. 空间尘埃探测进展与发展建议[J]. 前瞻科技,2022,1(1):38−50(in chinese) Wang Y J, Zhao C X, Li D T et al. Progress and Development Proposals of Space Dust Detection[J]. Science and Technology Foresight, 2022, 1(1): 38-50 [5] 欧阳自远, 月球科学概论[M]. 北京: 中国宇航出版社, 2005: 124-153 Ou-yang Z Y, Introduction to Lunar Science[M]. Beijing: China Astronautic Publishing House, 2005 [6] Kemurdzhian A L, Gromov V V, Cherrasov I I, et al. Automatic stations to study the lunar surface[R]. National Aeronautics and Space Administration, 1977 [7] Vinogradov A P. Preliminary data on lunar regolith returned by Luna-16 automatic probe[R]. NASA Technical Translation, 1971 [8] Robert Christy. The Mission of Luna 16[EB/OL]. http://www.zarya.info/Diaries/Luna/Luna16.php. [9] Erickson R J. Luna-16: an outstanding new achievement of soviet space science[R]. Foreign Technology Division, 1970 [10] Vinogradov A P. Preliminary data on lunar soil collected by the Luna-20 automatic station[R]. NASA Technical Translation, 1973 [11] 中国科学院地球化学研究所, 月质学研究进展[M]. 北京: 科学出版社, 1977: 41-48 Institute of Geochemistry. Advance in the research of lunar geology[M]. Beijing: Science Press, 1977 [12] Robert C. The Mission of Luna 20[EB/OL]. http://www.zarya.info/Diaries/Luna/Luna20.php [13] Sagdeyev R Z, Shtern M I. Mastery of outer space in the USSR in 1976[R]. National Aeronautics And Space Administration, 1979 [14] Robert C. The mission of Luna 24 [EB/OL]. http://www.zarya.info/Diaries/Luna/Luna24.php. [15] Mundt F D, Schreyer J M, Wampler W E, et al. Apollo lunar sample return container: summary report [R]. OAK RIDGE Y-12 PLANT, 2013 [16] Allton J H,Bagby J R,Stabekis P D,et al. Lessons learned during Apollo lunar sample quarantine and sample curation[J]. Advances in Space Research,1998,22(3):373−382 doi: 10.1016/S0273-1177(98)00034-9 [17] Allton J H. Lunar Samples: Apollo collection tools, curation handling, surveyor III and soviet luna samples [R]. Johnson Space Center, 2009 [18] Taylor L A, Schmitt H H, Carrier W D. The lunar dust problem: from liability to asset[C]. 1st Space Exploration Conference: Continuing the Voyage of Discovery, 2005 [19] Ou-yang Z Y. Scientific objectives of chinese lunar exploration project and development strategy[J]. Advance in Earth Science,2004,19(3):351−358 (欧阳自远. 我国月球探测的总体科学目标与发展战略[J]. 地球科学进展,2004,19(3):351−358(in chinese) doi: 10.3321/j.issn:1001-8166.2004.03.001 Ou-yang Z Y, Scientific Objectives of Chinese Lunar Exploration Project and Development Strategy[J]. Advance in Earth Science, 2004, 19(3): 351-358 doi: 10.3321/j.issn:1001-8166.2004.03.001 [20] Ye P J,Peng j. Deep space exploration and its prospect in china[J]. Engineering Science,2006,8(10):13−18 (叶培建,彭兢. 深空探测与我国深空探测展望[J]. 中国工程科学,2006,8(10):13−18(in chinese) doi: 10.3969/j.issn.1009-1742.2006.10.003 Ye P J, Peng j. Deep Space Exploration and Its Prospect in China[J]. Engineering Science, 2006, 8(10): 13-18 doi: 10.3969/j.issn.1009-1742.2006.10.003 [21] Li H L,Wang C Y,Liu Y X,et al. Gathering and sealing of lunar sample in container filled with pure nitrogen[J]. Chinese Journal of Vacuum Science and Technology,2017,37(1):7−11 (李昊璘,王春勇,刘轶鑫,等. 月球样品充氮保护密封技术的研究[J]. 真空科学与技术学报,2017,37(1):7−11(in chinese) Li H L, Wang C Y, Liu Y X, et al. Gathering and Sealing of Lunar Sample in Container Filled with Pure Nitrogen[J]. Chinese Journal of Vacuum Science and Technology, 2017, 37(1): 7-11 [22] Wang C Y,Fu Z H,Li H L,et al. The lunar sample encapsulation[J]. Vacuum & Cryogenics,2021,27(1):100 (王春勇,付朝晖,李昊璘,等. 月球样品密封封装装置[J]. 真空与低温,2021,27(1):100(in chinese) Wang C Y, Fu Z H, Li H L, et al. The Lunar Sample Encapsulation[J]. Vacuum & Cryogenics, 2021, 27(1): 100 [23] Wang C Y,Li H L,Sun L,et al. Experimental investigation on adaptability of lunar samples vacuum sealing structure[J]. Lubrication Engineering,2017,42(6):88−91 (王春勇,李昊磷,孙亮,等. 月球样品真空密封结构适应性试验研究[J]. 润滑与密封,2017,42(6):88−91(in chinese) Wang C Y, Li H L, Sun L, et al. Experimental Investigation on Adaptability of Lunar Samples Vacuum Sealing Structure[J]. Lubrication Engineering. 2017, 42(6): 88-91 [24] Wu X J,Wang K C,Yang Z R,et al. Study on preparation and characterization of In-Ag solders[J]. Precious Matals,2019,40(1):57−62 (吴宪吉,王克成,杨志荣,等. 铟银软钎料的制备与钎焊性研究[J]. 贵金属,2019,40(1):57−62(in chinese) Wu X J, Wang K C, Yang Z R et al. Study on Preparation and Characterization of In-Ag solders[J]. Precious Matals, 2019, 40(1): 57-62 [25] Fu Z H,Xu M,Du Y G,et al. Noval ultra high vacuum sealing technique with soft metal knife edge for space crafts[J]. Chinese Journal of Vacuum Science and Technology,2014,34(3):221−224 (付朝晖,许旻,杜永刚,等. 极高真空环境下软金属刀口密封研究[J]. 真空科学与技术学报,2014,34(3):221−224(in chinese) Fu Z H, Xu M, Du Y G et al. Noval ultra high vacuum sealing technique with soft metal knife edge for space crafts[J]. Chinese Journal of Vacuum Science and Technology, 2014, 34(3): 221-224 [26] Li D T,Wang Y J,Zhang H Z,et al. Applications of vacuum measurement technology in China’s space programs[J]. Space: Science & Technology,2021,1(1):21−36 [27] Li D T,Xi Z H,Wang Y G,et al. Vacuum metrology technology and its space application[J]. Chinese Journal Vacuum Science And Technology,2021,41(9):795−816 (李得天,习振华,王永军,等. 真空测试计量技术及其航天应用[J]. 真空科学与技术学报,2021,41(9):795−816(in chinese) Li D T, Xi Z H, Wang Y G, et al. Vacuum Metrology Technology and its Space Application[J]. CHINESE JOURNAL VACUUM SCIENCE AND TECHNOLOGY, 2021, 41(9): 795-816 [28] Duxbury T C. NASA Stardust sample return mission[R]. Jet Propulsion Laboratory, 2004 [29] Zega T, Zare R N, Young E D, et al. Comet 81P/Wild 2 under a microscope[R]. Lawrence Livermore National Laboratory, 2009 [30] Willcockson W H. Stardust sample return capsule design experience[J]. Journal of Spacecraft And Rockets, 36 (3): 470-474 [31] https://solarsystem.nasa.gov/stardust/tech/index.html [32] Tsou P. Stardust: a comet coma flyby sample return[C]. 2009 IEEE Aerospace conference, Big Sky, MT, USA, March 7-14, 2009 [33] Brownlee D E,Tsou P,Anderson J D,et al. Stardust: comet and interstellar dust sample return mission[J]. Journal of Geophysical Research,2003,108(E10):1−15 [34] Tsou P, Brownlee D E, Sandford S A, et al. Wild 2 and interstellar sample collection and earth return[J]. Journal of Geophysical Research. 108 (8113) (2003) 3-1–3-21 [35] Xu W B,Zhao H B. Deep space exploration of asteroids: the science perspectives[J]. Advances in Earth Science,2005,20(11):31−38 (徐伟彪,赵海斌. 小行星深空探测的科学意义和展望[J]. 地球科学进展,2005,20(11):31−38(in chinese) Xu W B, Zhao H B. Deep Space Exploration of Asteroids: the Science Perspectives[J]. Advances in Earth Science, 2005,20(11):31-38 [36] 赵忠贤, 小行星冲击碎岩器设计分析与实验研究[D]. 北华航天工业学院, 2020 Zhao Z X. Design, analysis, experiment and research of the asteriod impact rock crusher[D]. North China Institute of Aerospace Engineering, 2020 [37] Siddiqi A A. Beyond earth: a chronicle of deep space exploration, 1958-2016[M]. National Aeronautics and Space Administration, Office of Communications, NASA History Division, 2018 [38] Binzel R P,Rivkin A S,Bus S J,et al. MUSES-C target asteroid (25143) 1998 SF36: A reddened ordinary chondrite[J]. Meteoritics & Planet Science,2001,36(8):1167−1172 [39] Miyamoto H,Yano H,Scheeres D J,et al. Regolith migration and sorting on asteroid Itokawa[J]. Science,2007,316(5827):1011−1014 doi: 10.1126/science.1134390 [40] Keller L P,Berger E L,et al. A transmission electron microscope study of Itokawa regolith grains[J]. Earth, Planets and Space,2014,66(1):89 doi: 10.1186/1880-5981-66-89 [41] Tomoki N,Takaaki N,Masahiko T,et al. Itokawa dust particles: a direct link between S-type asteroids and ordinary chondrites[J]. Science,2011,333(6046):1113−1116 doi: 10.1126/science.1207758 [42] Yada T,Fujimura A,Abe M,et al. Hayabusa-returned sample curation in the planetary material sample curation facility of JAXA[J]. Meteoritics & Planetary Science,2014,49(2):135−153 [43] Sei-ichiro W,Yuichi T,Makoto Y,et al. Hayabusa2 mission overview[J]. Space Science Reviews,2017,208(1-4):3−16 doi: 10.1007/s11214-017-0377-1 [44] Saiki T,Imamura H,Arakawa M,et al. The small carry-on impactor (SCI) and the Hayabusa2 impact experiment[J]. Space Science Reviews,2017,208(1-4):165−186 doi: 10.1007/s11214-016-0297-5 [45] Sawada H,Okazaki R,Tachibana S,et al. Hayabusa2 sampler: collection of asteroidal surface material[J]. Space Science Reviews,2017,208(1-4):81−106 doi: 10.1007/s11214-017-0338-8 [46] Arakawa M,Wada K,Saiki T,et al. Scientific objectives of small carry-on impactor (SCI) and deployable camera 3 digital (DCAM3-D): observation of an ejecta curtain and a crater formed on the surface of Ryugu by an artificial high-velocity impact.[J]. Space Science Reviews,2017,208(1-4):187−212 doi: 10.1007/s11214-016-0290-z [47] Okazaki R,Nagao K,Miura Y N,et al. Noble gases recovered from the Hayabusa sample container (abstract)[J]. Lunar Planet Sci,2011:1653 [48] Ryuji O,Hirotaka S,Shinji Y,et al. Hayabusa2 sample catcher and container: metal-seal system for vacuum encapsulation of returned samples with volatiles and organic compounds recovered from C-Type Asteroid Ryugu[J]. Space Science Reviews,2017,208(1-4):107−124 doi: 10.1007/s11214-016-0289-5 [49] Yada T, Abe M, Uesugi M, et al. A nature of particles in the Hayabusa sample catcher and contamination controls for Hayabusa 2 sample containers[C]. 77th Annual Meeting of the Meteoritical Society, 2014 [50] Yamada T, Yoshihara K, Yamada K, et al. Development of a Hayabusa-2 sample return capsule [C]. 30th ISTS, 2015 [51] Yamada T,Yoshikawa M,Abe M,et al. System design of the Hayabusa 2-asteroid sample return mission to 1999 JU3[J]. Acta Astronautica,2013,91:356−362 doi: 10.1016/j.actaastro.2013.06.028 [52] Sawada H, Okazaki R, Okamoto C, et al. The sampling system of Hayabusa2 missions (abstract) [C]. 63rd International Astronautical Congress 2012, 2012 [53] Clark B E,Binzel R P,Howell E S,et al. Asteroid (101955) 1999 RQ36: Spectroscopy from 0.4 to 2.4 μm and meteorite analogs[J]. Icarus,2011,216(2):462−475 doi: 10.1016/j.icarus.2011.08.021 [54] Hergenrother C W,Nolan M C,Binzel R P,et al. Lightcurve, color and phase function photometry of the OSIRIS-REx target asteroid (101955) Bennu[J]. Icarus,2013,226(1):663−670 doi: 10.1016/j.icarus.2013.05.044 [55] Delbo M,Harris A W,Mottola S,et al. Thermal inertia of near-earth asteroids and implications for the magnitude of the Yarkovsky effect[J]. Icarus,2007,190(1):236−249 doi: 10.1016/j.icarus.2007.03.007 [56] Emery J P,Fernandez Y R,Kelley M S,et al. Thermal infrared observations and thermophysical characterization of OSIRIS-REx target asteroid (101955) Bennu[J]. Icarus,2014,234(1):17−35 [57] Clark B C, Bierhaus E B, Harris J W, et al. TAGSAM: A gas-driven system for collecting samples from solar system bodies[C]. 2016 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2016 [58] https://solarsystem.nasa.gov/missions/osiris-rex/in-depth/. [59] Beshore E, Lauretta D, Boynton W, et al. The OSIRIS-REx asteroid sample return mission[R]. NASA goddard space flight center, 2015 [60] Bierhaus E B, Clark B C, Harris J W, et al. The OSIRIS-REx spacecraft and the touch-and-go sample acquisition mechanism (TAGSAM)[J]. Space Sci Rev 214 (2018) 107 [61] Ajluni T, Linn T, Willcockson W, et al. OSIRIS-REx returning the asteroid sample[C]. 2015 IEEE Aerospace CONFERENCE, Big Sky, MT, USA, March 7-14, 2015 [62] Nilsen E, Whetsel C, Mattingly R, et al. Mars sample return campaign status[C]. 2012 IEEE Aerospace Conference, Big Sky, MT, USA, Mar. 3-10, 2012 [63] O’Neil W, Cazaux C, et al. The mars sample return project[C]. 50th International Astronautical Congress, Amsterdam, USA, October4-8, 1999 [64] Monica M G. Exploring Mars with Returned Samples[J]. Space Sci Rev,2020,216(51):1−21 [65] Farley K A,Williford K H,Stack K M. Mars 2020 mission overview[J]. Space Sci Rev,2020,216(142):1−41 [66] Perino S, Cooper D, Rosing D, The evolution of an orbiting sample container for potential mars sample return[C]. 2017 IEEE Aerospace Conference, Big Sky, MT, USA, March 4-11, 2017 [67] Neal C. Issues involved in a martian sample return: integrity preservation and the curation and analysis planning team for Extraterrestrial materials (CAPTEM) position[J]. Journal of Geophysical Research, 2000, 105(E9), 22487-22506 [68] Mepac N. Science Priorities for Mars Sample Return[J]. Astrobiology, 2008, 8(3), 489-535 [69] Younse P, Thimal A, Backes P, et al. Sample sealing approaches for Mars Sample Return caching[C]. 2012 IEEE Aerospace Conference, Big Sky, MT, USA, March 3-10, 2012 [70] Bao X Q, Younse P, Bhandari P. FE simulation of SMA seal for mars sample return[C]. Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2013, San Diego, California, USA, April 19, 2013 [71] Kriechbaum K, Youns P e, Kulczycki E, Design of robust sealing mechanism for mars 2020 sample tubes[J]. Journal of Spacecraft and Rockets, 2020, 57(5): 964-974 [72] Gershman R, Bar-Cohen Y, Hendry M, et al. Break-the-chain technology for potential mars sample return[C]. 2018 IEEE Aerospace Conference, Big Sky, MT, USA, March 3-10, 2018 [73] Younse P, Strahle J W, Dolci M, el at. An orbiting sample capture and orientation system architecture for potential mars sample return[C]. 2018 IEEE Aerospace Conference, Big Sky, MT, USA, March 3-10, 2018 [74] Bar-Cohen Y, Rivellini T P, Wincentsen J E, el at. Separation and sealing of a sample container using brazing[R]. Jet Propulsion Laboratory, 2007 [75] Bar-Cohen Y, Wu J, Olorunsola A K. Simultaneous separation, seaming and sealing using brazing (S3B) for sample containerization and planetary protection[C]. Smart Structures and Materials 2005: Industrial and Commercial Applications of Smart Structures Technologies. International Society for Optics and Photonics, San Diego, California, USA, May 5, 2006 [76] Bar-Cohen Y, Badescu M, Sherrit S, el at. Synchronous separation, seaming, sealing and sterilization (S4) using brazing for sample containerization and planetary protection[C]. Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2017, Denver, Colorado, USA, April 12 2018 [77] Bao X Q, Badescu M, Sherrit S. Heating and thermal control of brazing technique to break contamination path for potential Mars sample return[C]. Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2017, Portland, Oregon, USA, April 10, 2017 [78] Cholakian T, Chung S, Kulczycki E. Bio-Barriers: preventing forward contamination and protecting planetary astrobiology instruments[C]. 2007 IEEE Aerospace Conference, Big Sky, MT, USA, March 3-10, 2007 -
图( 32)
计量
- 文章访问数: 2315
- HTML全文浏览数: 2315
- PDF下载数: 5
- 施引文献: 0