
 首页
首页 登录
登录 注册
注册



-
在大气环境遥感监测领域, 以卫星[1,2]和大型飞机[3,4]作为观测平台, 具有覆盖范围广、数据采集能力强的特点, 可进行大范围内目标物的识别、监测和分析. 然而, 卫星遥感监测无法满足例如城市微环境等高精度的任务需求[5], 同时容易受气象因素干扰, 例如云层遮挡、自然光强度不足等因素[6]. 大型飞机通常是固定翼飞机, 高空飞行时需要航空当局的许可并且飞行成本较高, 难以在较小的重点目标区内进行精细化监测[7]. 旋翼无人机由于其具有垂直起降、空中悬停、飞行稳定和使用简单等优点, 为环境监测提供了新的途径[8]. 国内外研究人员纷纷尝试将旋翼无人机应用到大气科学等遥感领域. 2021年Wu等[9]使用六旋翼无人机平台探测深圳城市地区的黑碳颗粒物和 O3浓度的垂直分布情况. 同年Li等[10]在无人机平台上搭载PM2.5, PM10传感器, 研究严重污染天气条件下近地表气溶胶的垂直分布特征. 2022年Arroyo等[11]集成多类型传感器模块结合无人机进行悬停和移动时的污染物和空气质量检测.
多轴差分吸收光谱技术(MAX-DOAS)[12]是一种可快速准确同时获取大气多污染物的遥测方法, 将MAX-DOAS技术与旋翼无人机结合起来构建机载遥感系统, 这为大气污染监测提供了新的解决方案. 2022年, Liu等[13]利用多旋翼无人机设计一种无人机载超光谱遥测系统, 精准追溯污染源位置. 2023年, Chen等[14]利用安装在无人机上的成像光谱仪开展了成都电厂NO2排放量的监测研究. 2024年, Xing等[15]以典型内陆城市合肥及其周边农田排放的大气活性氮氧化物为研究对象, 开展了卫星遥感、高光谱无人机遥感和MAX-DOAS观测相结合的立体观测实验.
鉴于大气环境监测需要掌握污染物在不同高度的浓度分布情况, 目前主要采用观测高塔的方式[16,17], 在塔的不同高度放置监测设备, 但是存在观测范围固定、位置固定、布局受限等局限性[18,19], 难以全面反映不同高度和角度的污染物分布情况. 相比之下, 基于旋翼无人机平台的差分光学吸收二维探测系统具有更大的灵活性和机动性, 可以在不同高度全方位进行观测获取大气污染物的空间分布. 本文以小型二维MAX-DOAS为主体, 结合多个传感器技术搭建了一套轻量化、低成本的差分光学吸收二维探测系统, 将该系统安装在旋翼无人机平台上, 探测和研究大气污染气体的垂直分布特征. 本研究为制定地区大气污染治理决策提供数据支持.
-
旋翼型无人机主要分为无人直升机(单旋翼)和多旋翼飞机(四旋翼、六旋翼、八旋翼等), 飞行时可实现垂直起降、空中悬停、灵活调转方向. 凭借较高的空间分辨率, 可用于近距离不同高度污染分布监测. 本研究选用X6-1000无人机架, 具有对称分布的六根轴. 该无人机平台主要由机身、动力系统、飞行控制系统以及连接在起落架处的机舱组成. 机身支架、六根轴管和机舱均采用碳纤维材料, 该材料具有强度高、质地轻的特点, 可以减小无效载荷. 动力系统主要由每根轴末端安装的无刷电机、电子调速器和旋翼组成. 飞行控制系统负责处理传感器数据并控制无人机的姿态和飞行稳定性. 飞控内部的气压计等传感器、细杆固定支撑的GPS用于定位和导航. 最大飞行距离为无障碍1000 m, 最大飞行速度为50 km/h, 抗风等级为4级, 最大载荷为4 kg. 根据整个差分光学吸收二维探测设备自身重量选取合适的电机、电调、电池等部件构建无人机平台, 并设计符合该设备储放的轻质机舱, 其中倾角传感器置于机舱顶部, 用于检测平台的稳定性. Hedworth等[20]发现探测设备在多旋翼无人机上的安装位置会对探测精度产生影响, 结合流场分析发现, 气象和污染物探测传感器应当安装在靠近无人机中心轴的位置, 并且在高度上应当靠近旋翼旋转平面的相对静风区, 重量较大的设备可安装在无人机下方, 如图1所示.
-
构建的机载差分光学吸收二维系统如图2所示, 由MAX-DOAS光谱采集系统、控制系统和飞行环境监测系统三部分组成. 由迷你电脑控制自行研发的小型MAX-DOAS系统, AvaSpec-NXS2048CL光谱仪通过光纤连接由二维舵机云台、望远镜、摄像头组成的光谱采集系统. 光谱范围为280—438 nm, 光谱分辨率为0.34 nm, 重量为277.5 g. 摄像头用来实时监控飞行过程中望远镜的扫描视野, 以确保没有障碍物遮挡光线. 环境监测系统则由倾角传感器、GPS导航记录仪、高度传感器等组成, TOPGNSS-100B导航记录仪通过输出标准的NMEA0183数据协议解析经纬度信息等. 其中高度传感器附带检测温湿度变化的功能, 有利于后续对光谱数据的反演和分析[21]. 整体系统进行了集成化及轻量化设计, 加上机舱总体重量小于2.5 kg, 适用于无人机平台的搭载. 其中二维云台作为光谱采集系统的核心组件, 选用两个DS3218型数字舵机组装而成, 扭矩大且角度精准, 通过单片机精确控制二维舵机与望远镜协同工作, 从而实现光谱采集.
图3为差分光学吸收二维系统搭建在旋翼无人机平台的整体实物图. 测量前设置好二维舵机平台转动的角度指令, 电脑通过串口发送指令驱动二维舵机云台转动相应角度, 从而控制云台上方的望远镜方位角及其俯仰角的变化, 并通过摄像头记录光线是否被遮挡. 望远镜收集到的太阳散射光通过光纤传输到光谱仪光学入口, 经光栅分光及CCD光电转换后传输给控制电脑并通过上位机程序保存在固定文件夹内. 同时采集飞行状态时的高度数据、温湿度, 将其可视化于上位机程序界面, 与GPS地理位置数据一同保存在光谱数据文件当中. 利用高度数据获取光谱数据的采集位置, 温湿度数据主要用于记录飞行环境状态, 同步记录无人机飞行倾角状态, 筛选出飞行状态异常时采集的光谱数据.
-
无人机姿态的变化将影响机载系统的稳定性, 在无人机飞行稳定性分析中, 偏航、俯仰与翻滚三种基本姿态的检测与控制至关重要. 故在机载系统上安装倾角传感器实时检测机载设备系统在飞行过程中角度的变化, 通过外接传感器检测到的角度偏差来判断此刻无人机的飞行状态.
图4展示了2024年5月21日观测时间内无人机悬停过程中的角度变化. 在此时间段内, 传感器的采样时间设置为500 ms, 间隔10 s取固定值进行数据分析. 飞行过程中姿态变化会引起探测路径的变化, 从而影响吸收光路的长度和探测结果. 从图4(b)可看出, 机载设备的角度偏差均值分别为0.07°, –0.13°, –0.12°, 均方误差小于1.5°, 3种姿态在整体上呈现出稳定的趋势, 若个别时刻出现机身动荡的情况, 则针对性地筛选出这些动荡时段的数据, 并对剩下的数据进行进一步的处理和分析.
-
旋翼无人机载系统反演算法亦是基于朗伯-比尔定律(Lambert-Beer’s law)来反演大气中微量气体含量:
其中,
$ {I_0}(\lambda ) $ 为原始光强;$ I(\lambda ) $ 为经过大气吸收及散射后的光强;$ {\sigma _j}(\lambda ) $ 为第j种气体的吸收截面;$ {\text{SC}}{{\text{D}}_j} $ 为其斜柱浓度, 表示气体浓度在路径上的积分;$ g(\lambda ) $ 代表大气中瑞利散射、米散射等对光强造成的衰减;$ \sigma _j'(\lambda ) $ 为痕量气体分子吸收截面随波长快变化部分,$ \sigma _j^{\text{b}}(\lambda ) $ 为慢变化部分. 去除痕量气体的差分吸收结构, 此时差分光学厚度$ {D}^{\prime }={\mathrm{ln}}\dfrac{{I}_{0}^{\prime }(\lambda )}{I(\lambda )}= -\displaystyle\sum\nolimits _{j}^{n}\left[{\sigma }_{j}^{\prime }(\lambda )\cdot {\text{SCD}}_{j}\right] $ , 由于大气中瑞利散射、米散射通常随波长进行慢变化, 因此可通过高通滤波的方式去除$ \sigma _j^{\text{b}}(\lambda ) $ 、瑞利散射、米散射等的影响, 只留下分子吸收的快变部分, 通过与标准吸收截面进行非线性最小二乘拟合, 即可得到各痕量气体的浓度信息SCD.机载差分光学吸收二维探测系统通过测量天顶方向和其他测量方向的大气吸收光谱来获取大气痕量气体的浓度信息, 其中天顶方向被认为是“相对干净”的参考谱参与拟合过程.
-
为了验证机载系统采集光谱数据的准确性, 采用商用地基MAX-DOAS仪器[22]观测数据与同步观测的机载数据进行对比. 观测地点 (淮北师范大学物理楼, 33°58' (N), 116°48' (E)) 位于淮北北部郊区, 商用地基 MAX-DOAS 系统安装在物理楼 5 楼楼顶, 观测时望远镜指向市区方向, 自动记录11个仰角(1°, 2°, 3°, 4°, 5°, 6°, 8°, 10°, 15°, 30°和90°)的散射阳光光谱序列.
对比验证时, 将机载系统置于商用地基MAX-DOAS相同的方位角, 设置6个观测仰角(1°, 2°, 5°, 6°, 8°, 15°)进行连续24 h的观测. 参考光谱选用正午时刻的90°仰角测量光谱, 两个系统均根据光强来调整积分时间, 时间分辨率基本一致. 图5为观测期间机载系统与商用地基MAX-DOAS观测的NO2差分斜柱浓度的时间序列对比图, 可看出在08:00之后随着人为活动增强早高峰开始, 工厂生产过程排放以及道路机动车辆排放增加, NO2浓度不断升高并在 09:00 达到峰值, 之后伴随着早高峰结束, 大气边界层升高, 太阳辐射增强, 光化学反应开始变活跃导致 NO2浓度不断降低, 接着随着晚高峰的到来NO2浓度不断回升. 图6将6个仰角的对比结果分别进行相关性分析, 得到相关系数分别为0.96, 0.94, 0.96, 0.94, 0.94, 0.92, 证明两个数据之间的一致性较高, 机载系统可用来精确获取大气环境污染气体的浓度信息. 其中低仰角的相关系数高于高仰角, 可能因为低仰角下光穿过大气的传输路径相对较长从而能反映近地面污染物分布情况, 而高仰角观测则更多地受到高空及整个大气层的影响, 变动因素更多.
-
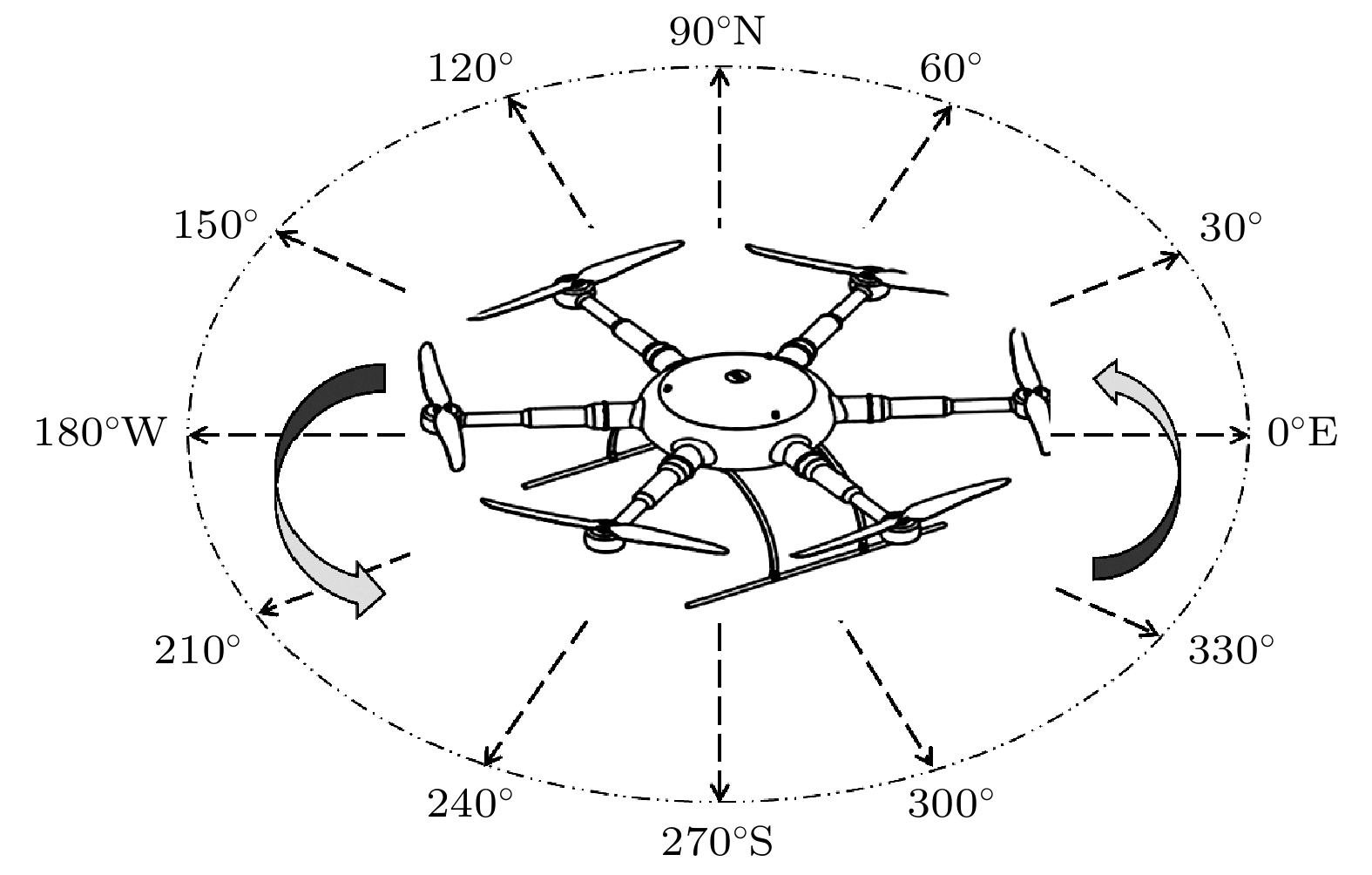
于2024年5月22—25日、27日在安徽省淮北市淮北师范大学(北纬33.96°, 东经116.79°)进行实验观测, 图7为测量地点的卫星图及飞行实景图. 实验中采用无人机平台搭载机载差分系统分别飞行距离水平面至30, 60, 90 m不同高度进行水平观测, 水平观测时仰角设置为0°, 方位角从0°—360°每隔30°逆时针方向进行一次测量(0°为正东方向), 具体测量方式如图8所示, 虚线箭头代表无人机悬停测量时的方位角度, 虚线圆环代表悬停的高度层, 以此获取测量地点不同方位角上的痕量气体NO2, SO2, HCHO随高度变化的浓度分布图.
-
图9所示为2024年5月21日中午1:13时的一条测量数据拟合效果实例, 采集光谱的平均时间分辨率为10 s, 此时无人机飞行高度为30 m, 方位角为330°, 参考谱选取无人机达到指定高度时的天顶观测谱. 实验具体拟合参数为表1所列, Ring效应以吸收截面的方式予以扣除, 拟合得到的NO2差分斜柱浓度为 2.95×1016 molec/cm2, 剩余噪声均方值约为1.21×10–3. SO2差分斜柱浓度为3.48×1016 molec/cm2, 剩余噪声均方值约为1.19×10–3. HCHO差分斜柱浓度为3.65×1016 molec/cm2, 剩余噪声均方值约为7.02×10–4.
-
在实验中, 选取2024年5月21日水平观测时测得固定仰角模式下不同方位角、不同高度的NO2, SO2, HCHO差分斜柱浓度DSCD分布如图10—图12所示, NO2, SO2, HCHO最高浓度为3.21×1016, 3.54×1016, 4.12×1016 molec/cm2, 最低浓度分别为0.76×1016, 1.09×1016, 1.55×1016 molec/cm2, 3种气体拟合残差平均值分别为1.44×10–3, 1.58×10–3, 2.01×10–3, 残差方差分别为5.35×10–8, 7.26×10–8, 8.30×10–8. 可以看出3种气体都存在浓度随高度升高而下降的趋势. 不同高度之间的浓度差异可能是由于污染源主要来源于近地面, 因此污染物浓度随高度增大而降低. 从方位角上看, 观测地点水平观测下不同高度时东南方向各气体浓度均较高, 西南和西北方向浓度较低, 表明东南方向可能存在排放源. 但高度为30, 60 m时SO2浓度分布的高值出现在正东和东北方向, 90 m处高值出现在东南方向, 原因可能是西北方向存在山体会遮挡气流, 且东南方向存在高架点源导致排放污染物在较高的高度层进行积累. 结合高度变化进一步分析观测期间的NO2, SO2, HCHO浓度变化结果如图13所示, 三者浓度均随高度升高而降低, 且NO2, SO2浓度下降速率也随高度升高而降低, HCHO浓度下降速率则变化不明显.
-
本文构建了一套轻量化、低成本的机载差分光学吸收二维探测系统, 主要将小型二维MAX-DOAS集成多个传感器搭建于旋翼无人机平台上, 对大气污染物浓度进行实时观测. 为了验证该系统的性能, 将其与商用地基MAX-DOAS系统进行了对比实验, 结果显示两者在数据拟合上具有良好的一致性. 实验设置无人机飞行指定高度后通过水平观测方式获取不同高度以及不同方位角下的NO2, SO2, HCHO浓度分布情况, 结果表明3种气体都存在浓度随高度升高而下降的趋势, 观测地点东南方向各气体浓度均较高, 西南和西北方向浓度较低. 该研究中的旋翼无人机载差分吸收光谱系统, 可灵活便捷获取大气多污染气体的垂直分布特征, 为制定地区大气污染治理决策提供数据支持.
旋翼无人机载差分光学吸收二维探测系统的研究及应用
Research and application of differential optical absorption two-dimensional detection system for rotorcraft unmanned aerial vehicle
-
摘要:
针对机载探测系统的小型化、多角度、多高度、快速同时获取大气多污染物的技术需求, 研制了一套融合多传感实现不同高度和不同方位角的轻量化、低成本的小型差分光学吸收二维机载观测系统, 并将其搭建于旋翼无人机平台上应用于大气环境污染物的观测. 本文详细介绍了研制的旋翼无人机平台和机载差分光学吸收系统构成, 开展了系统稳定性研究, 机载设备偏航角、翻滚角以及俯仰角的角度偏差均值分别为0.07°, –0.13°, –0.12°, 满足监测稳定性要求. 将机载系统与商用地基差分光学吸收系统进行比对观测实验, 比对结果显示二者监测数据相关系数均大于0.92. 最后利用该机载系统开展外场飞行实验, 机载差分系统分别飞行距离水平面至30, 60, 90 m高度进行观测, 观测时仰角设置为0°, 方位角从0°到360°每隔30°进行一次测量, 获得了不同方位角以及不同高度下的NO2, SO2, HCHO浓度分布信息. 研究结果表明该研发系统满足大气多污染物同时快速多角度多高度的探测技术需求.
Abstract:In order to meet the technical requirements for miniaturization, multi-angle, multi-altitude, and fast simultaneous acquisition of atmospheric pollutants, this study develops an integrated, lightweight, and cost-effective airborne differential optical absorption spectroscopy (DOAS) system. This system is designed in order to be used on a rotorcraft unmanned aerial vehicle (UAV) platform for monitoring atmospheric pollutants. The compositions of the hexacopter UAV platform and the airborne DOAS system are detailed in this work. The system includes a multi axis differential optical absorption spectroscopy (MAX-DOAS) spectral acquisition system, a control system, and a flight environment monitoring system. Commands are sent from a computer via serial communication to drive a gimbal, controlling the azimuth angle and elevation angle of the telescope, with a camera recording the light obstruction. The sunlight scattered by the atmosphere is collected by the telescope and transmitted via fiber optics to the spectrometer, which then transmits the data to the control computer. Additionally, the system captures data of altitude, temperature, humidity, and GPS location during flight, and filters out spectral data obtained under abnormal flight conditions. Stability studies indicate that the mean angular deviations for yaw, roll, and pitch are 0.07°, –0.13°, and –0.12° respectively, which meet the requirements for monitoring stability. Comparative experiments with a commercial ground-based DOAS system show that the correlation coefficients between the monitoring data of both systems are both greater than 0.92, confirming the reliability of the airborne system. In field flight experiments, the airborne DOAS system conducts observations at altitudes of 30 m, 60 m, and 90 m, with the elevation angle set at 0° and the azimuth angle measured every 30° from 0° to 360°. The system successfully obtains the concentration distributions of NO2, SO2, and HCHO at different azimuth angles and altitudes. The results indicate that the concentrations of these three gases decrease with altitude increasing, with higher concentrations observed in the southeast direction, indicating the presence of pollution sources in that direction. Further analysis with considering altitude changes indicates that the rate of decrease in NO2 concentration and SO2 concentration slow down with altitude increasing, while the rate of decrease in HCHO remains relatively constant. These findings indicate that this system effectively meets the technical requirements for simultaneous, rapid, multi-angle, and multi-altitude detection of atmospheric pollutants, providing essential support for the detailed monitoring of complex urban micro-environments.
-

-
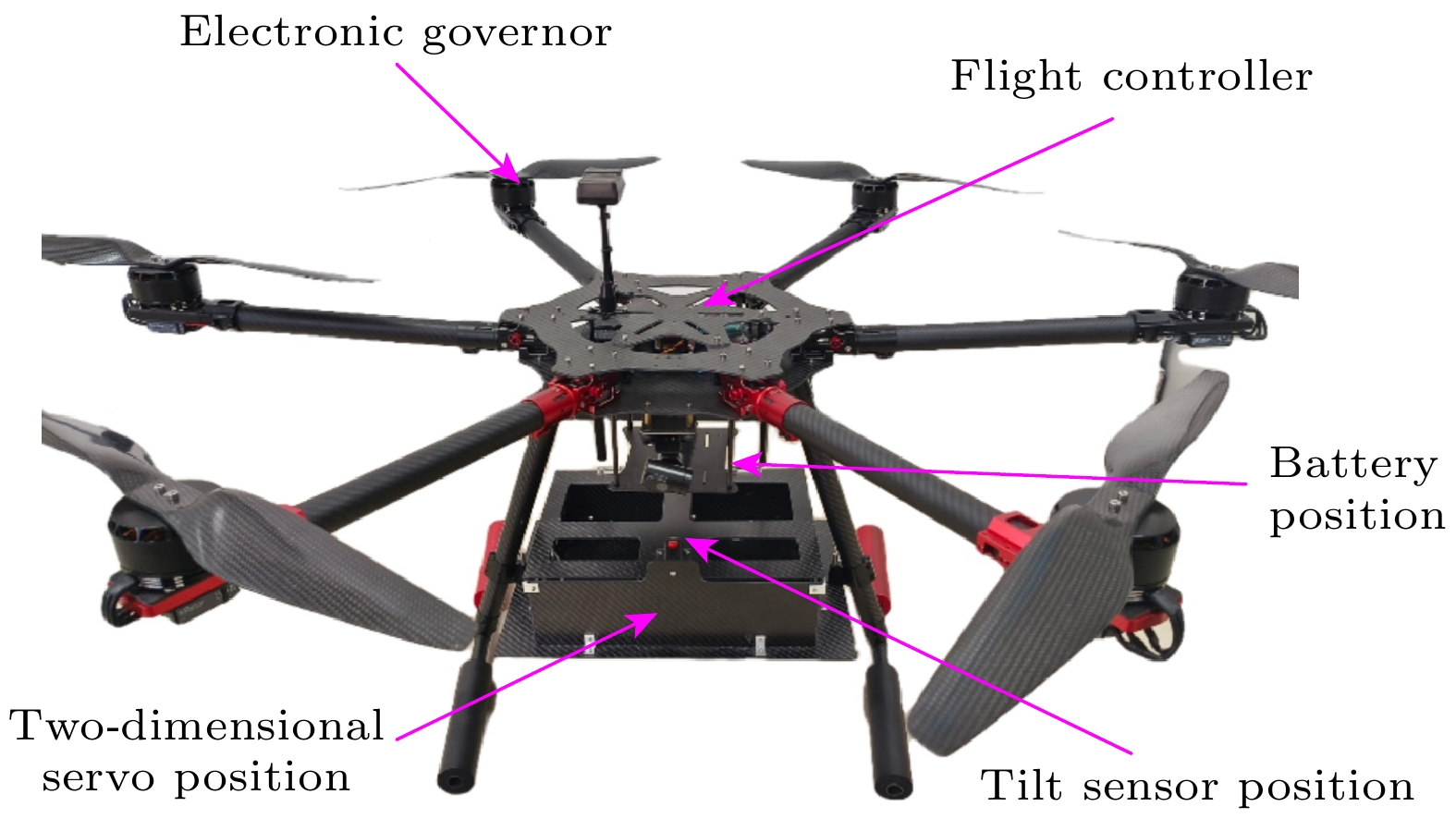
图 1 旋翼无人机平台实物图
Figure 1. Photograph of the rotorcraft unmanned aerial vehicle platform.
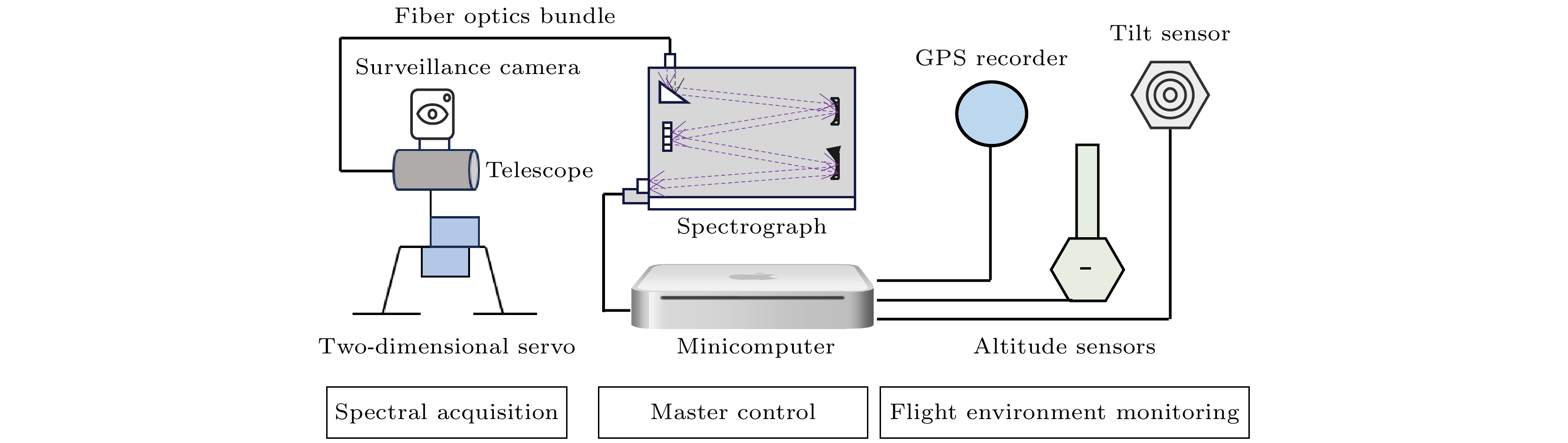
图 2 机载差分光学吸收二维系统结构示意图
Figure 2. Schematic diagram of the airborne differential optical absorption 2D system.
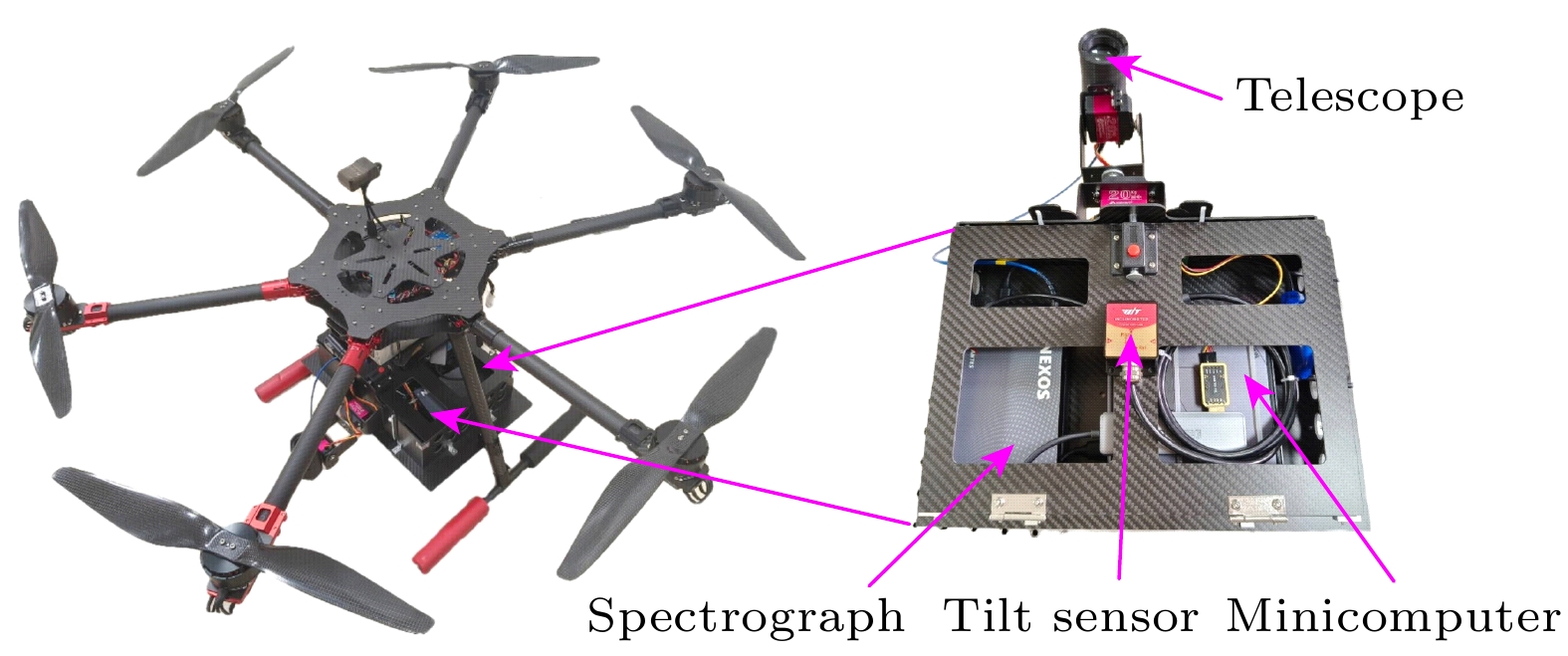
图 3 旋翼无人机载差分光学吸收二维探测系统实物图
Figure 3. Photograph of the differential optical absorption 2D detection System mounted on a rotorcraft unmanned aerial vehicle.
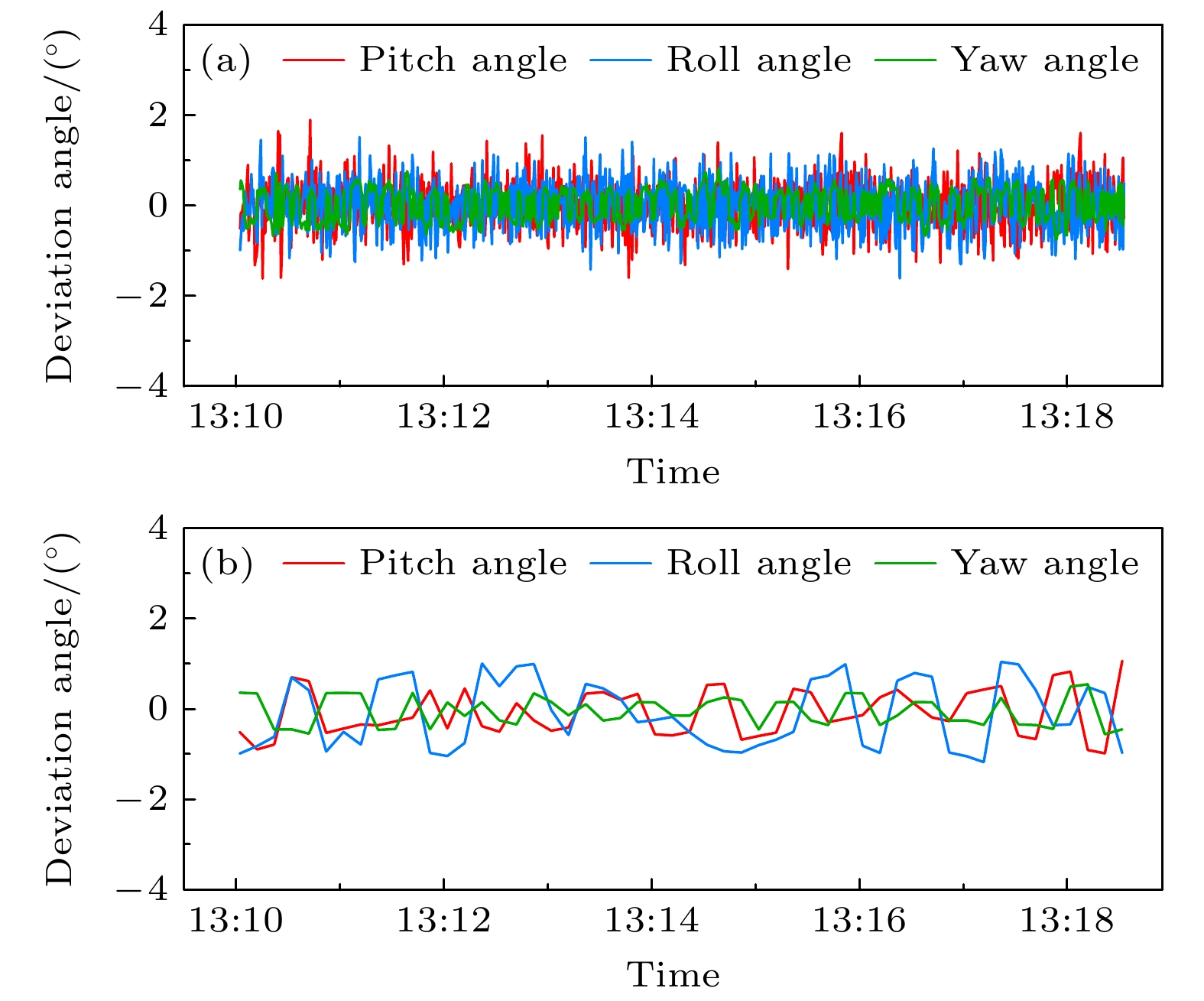
图 4 机载系统3种飞行姿态的角度偏差图 (a) 500 ms采样数据; (b)固定间隔采样数据
Figure 4. Angle deviation diagram of the three flight attitudes of the airborne system: (a) 500 ms sampled data; (b) data sampled at fixed intervals.
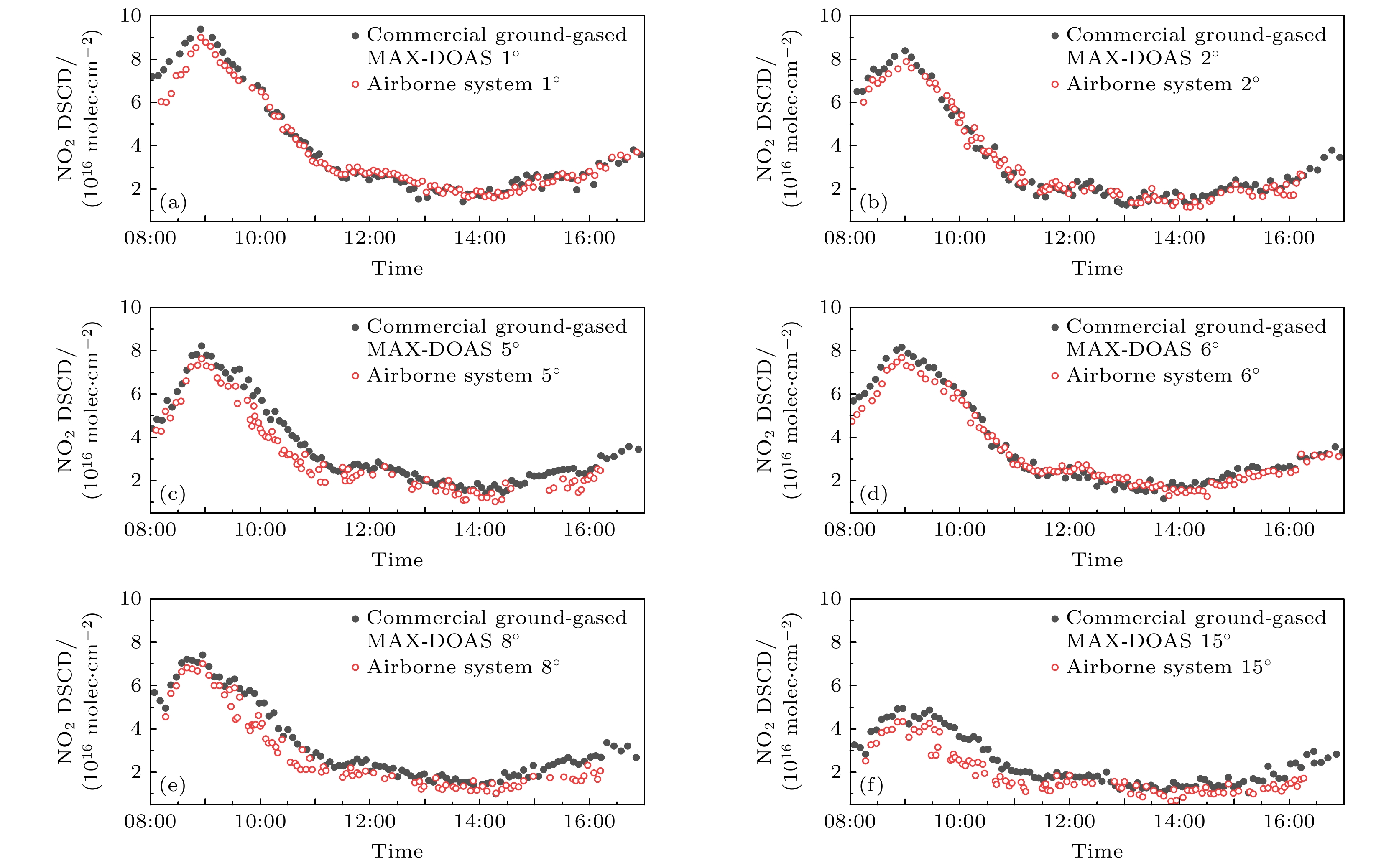
图 5 机载系统与商用地基MAX-DOAS观测的NO2差分斜柱浓度时间序列对比图 (a)仰角为1°; (b)仰角为2°; (c)仰角为5°; (d)仰角为6°; (e)仰角为8°; (f)仰角为15°
Figure 5. Comparison of NO2 differential slant column density time series observed by airborne system and commercial ground-based MAX-DOAS: (a) Elevation angle of 1°; (b) elevation angle of 2°; (c) elevation angle of 5°; (d) elevation angle of 6°; (e) elevation angle of 8°; (f) elevation angle of 15°.
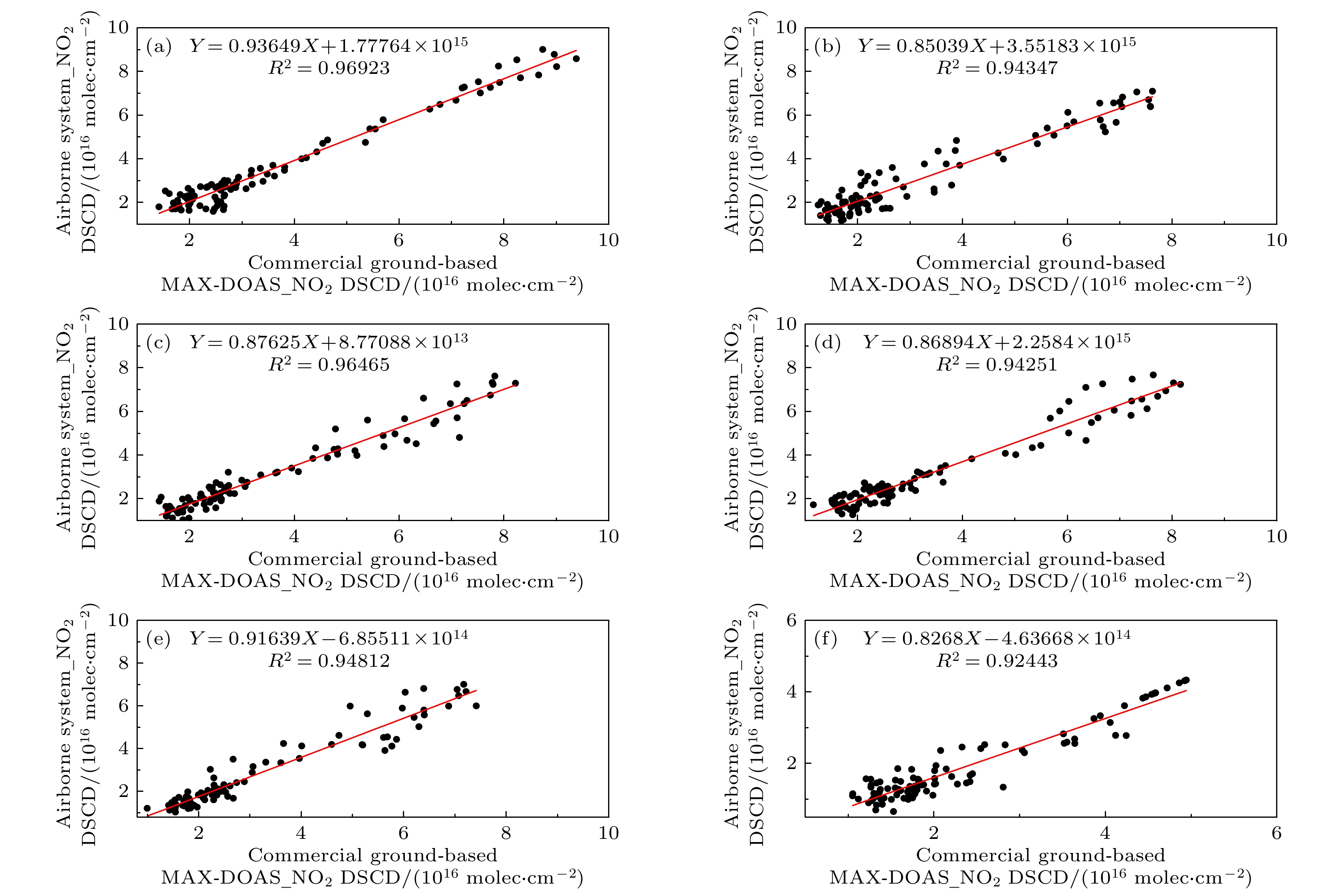
图 6 机载系统与商用地基MAX-DOAS观测的NO2差分斜柱浓度的对比相关图 (a)仰角为1°; (b)仰角为2°; (c)仰角为5°; (d)仰角为6°; (e)仰角为8°; (f)仰角为15°
Figure 6. Comparison correlation plot of NO2 differential slant column density observed by airborne system and commercial ground-based MAX-DOAS: (a) Elevation angle of 1°; (b) elevation angle of 2°; (c) elevation angle of 5°; (d) elevation angle of 6°; (e) elevation angle of 8°; (f) elevation angle of 15°.

图 7 无人机外场实验 (a)测量地点; (b)实景图
Figure 7. UAV field experiment: (a) Measurement site; (b) real-world image.
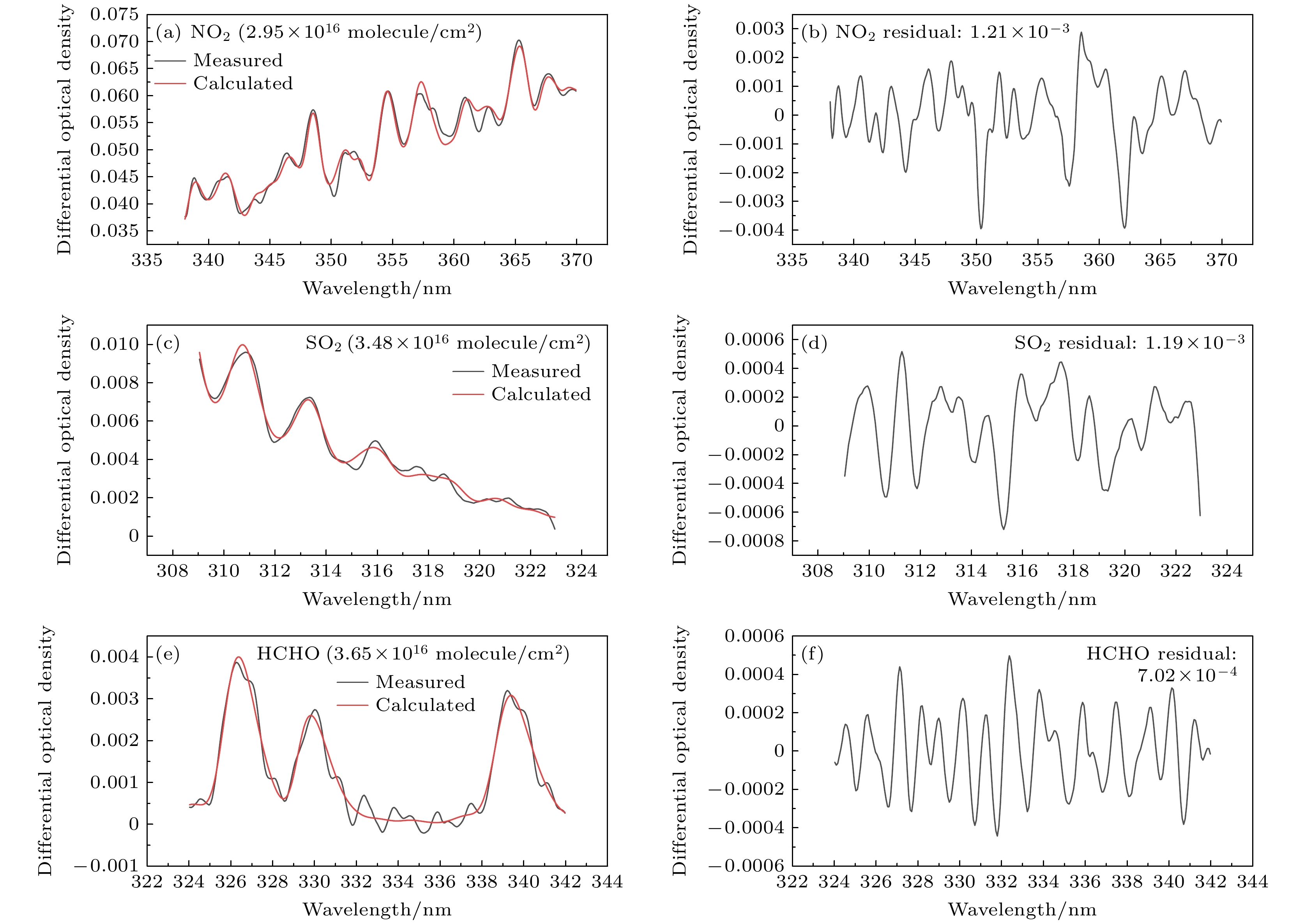
图 9 NO2, SO2, HCHO光谱拟合效果实例 (a) NO2光谱拟合; (b) NO2斜柱浓度拟合残差; (c) SO2光谱拟合; (d) SO2斜柱浓度拟合残差; (e) HCHO光谱拟合; (f) HCHO斜柱浓度拟合残差
Figure 9. Examples of spectral fitting results for NO2, SO2 and HCHO: (a) NO2 spectral fitting; (b) fitting residuals of NO2 slant column density; (c) SO2 spectral fitting; (d) fitting residuals of SO2 slant column density; (e) HCHO spectral fitting; (f) fitting residuals of HCHO slant column density.
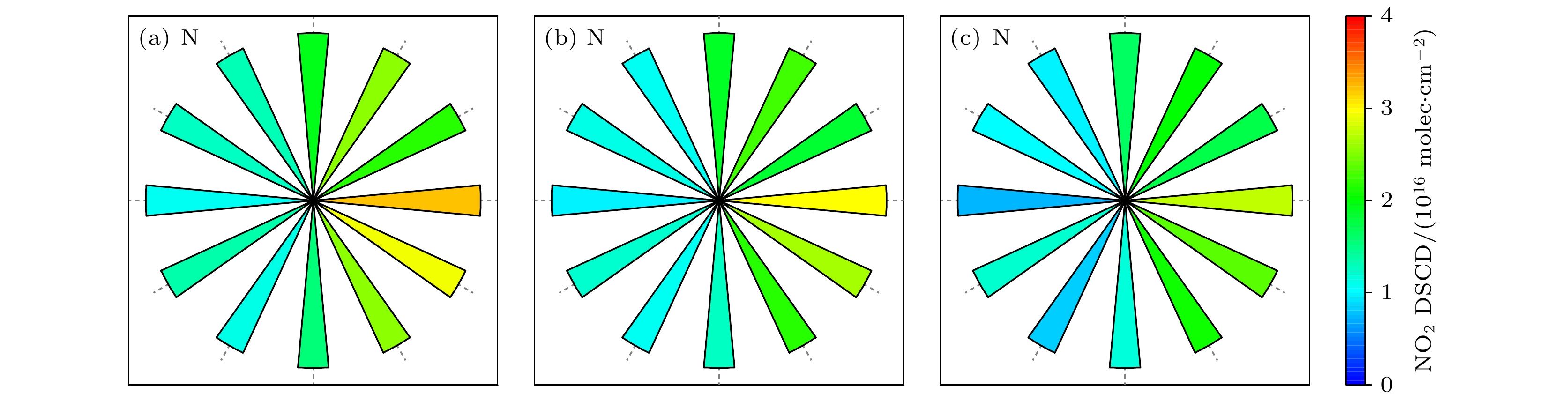
图 10 水平观测下不同高度的NO2浓度分布图 (a)高度为30 m; (b)高度为60 m; (c)高度为90 m
Figure 10. Distribution of NO2 concentration at different heights under horizontal observation: (a) Height of 30 m; (b) height of 60 m; (c) height of 90 m
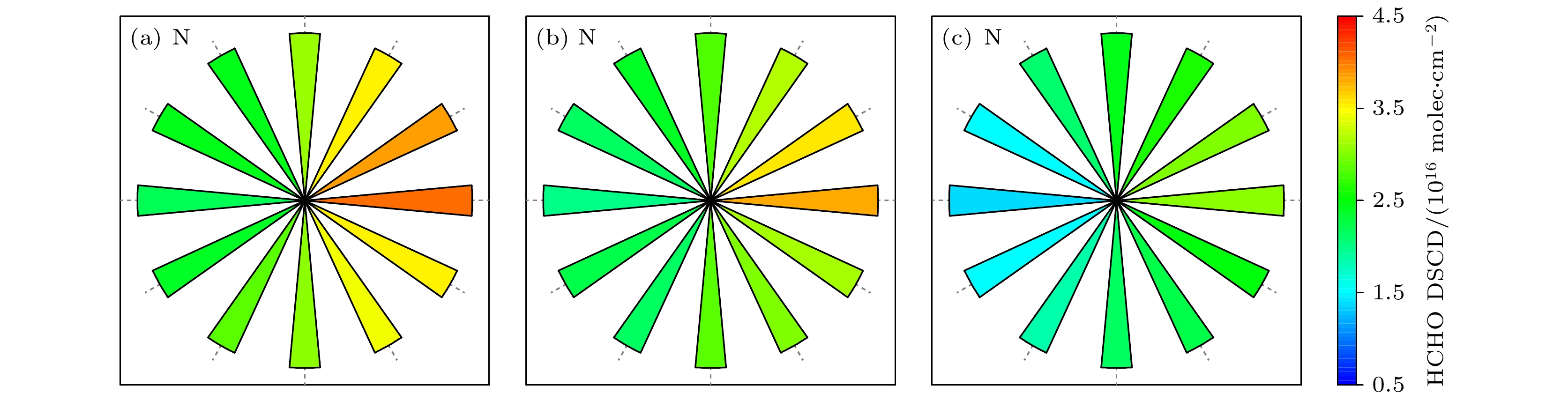
图 12 水平观测下不同高度的HCHO浓度分布图 (a)高度为30 m; (b)高度为60 m; (c)高度为90 m
Figure 12. Distribution of HCHO concentration at different heights under horizontal observation: (a) Height of 30 m; (b) height of 60 m; (c) height of 90 m.
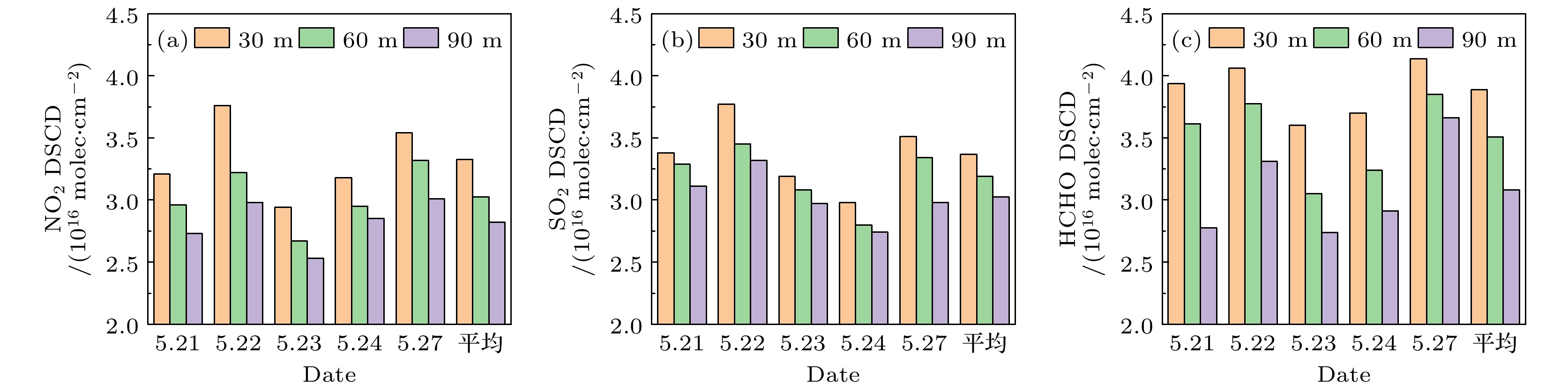
图 13 观测期间0°方位角下不同高度的NO2, SO2, HCHO浓度变化图 (a) NO2; (b) SO2; (c) HCHO
Figure 13. Variation of NO2, SO2, HCHO concentrations at different heights under 0° azimuth during the observation period: (a) NO2; (b) SO2; (c) HCHO.
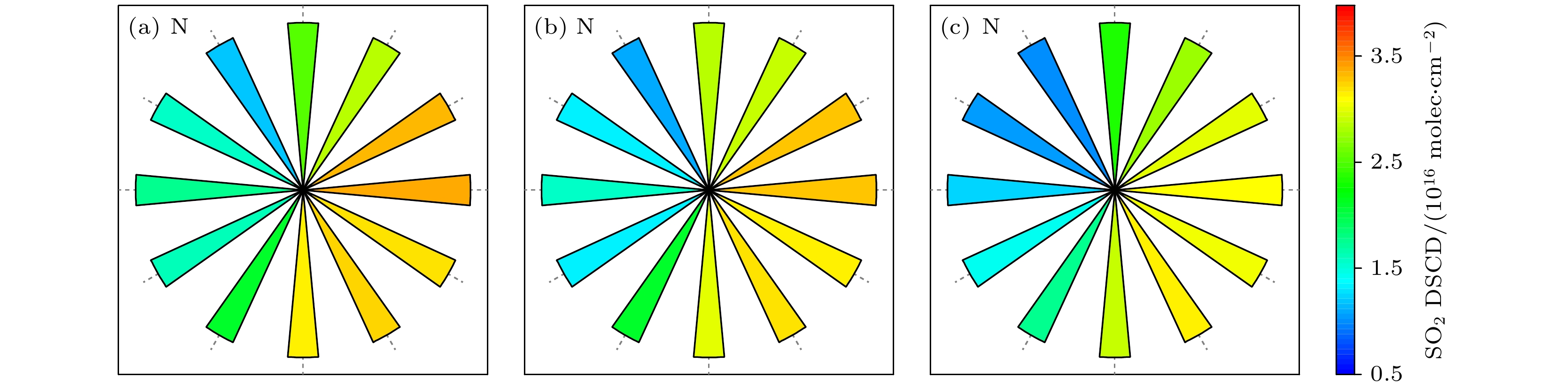
图 11 水平观测下不同高度的SO2浓度分布图 (a)高度为30 m; (b)高度为60 m; (c)高度为90 m
Figure 11. Distribution of SO2 concentration at different heights under horizontal observation: (a) Height of 30 m; (b) height of 60 m; (c) height of 90 m.
表 1 具体实验拟合参数
Table 1. Specific parameters of experimental fitting.
Parameter NO2 SO2 HCHO Fitting wavelength/nm 337—370 309—323 324—342 Polynomial degree 5 5 5 Intensity offset Constant Constant Constant NO2 220 K, 294 K[23] 294 K[23] 294 K[23] SO2 — 293 K[24] — HCHO 297 K[25] — 297 K[25] O3 223 K, 243 K[26] 223 K, 243 K[26] 223 K, 243 K[26] O4 293 K[27] — 293 K[27] Bro 223 K[28] — — Ring Calculated with FRS Calculated with FRS Calculated with FRS  下载: 导出CSV
下载: 导出CSV
-
[1] Su W J, Liu C, Chan K L, Hu Q H, Liu H, Ji X G, Zhu Y Z, Liu T, Zhang C X, Chen Y J, Liu J G 2020 Atmos. Meas. Tech. 13 6271 doi: 10.5194/amt-13-6271-2020 [2] Wu S S, Huang B, Wang J H, He L J, Wang Z Y, Yan Z, Lao X Q, Zhang F, Liu R Y, Du Z H 2021 Environ. Pollut. 273 116456 doi: 10.1016/j.envpol.2021.116456 [3] 徐晋, 谢品华, 司福祺, 李昂, 刘文清 2012 物理学报 61 282 doi: 10.7498/aps.61.024204 Xu J, Xie P H, Si F Q, Li A, Liu W Q 2012 Acta Phys. Sin. 61 282 doi: 10.7498/aps.61.024204 [4] 梁帅西, 秦敏, 段俊, 方武, 李昂, 徐晋, 卢雪, 唐科, 谢品华, 刘建国 2017 物理学报 66 090704 doi: 10.7498/aps.66.090704 Liang S X, Qin M, Duan J, Fang W, Li A, Xu J, Lu X, Tang K, Xie P H, Liu J G 2017 Acta Phys. Sin. 66 090704 doi: 10.7498/aps.66.090704 [5] Zhang H K, Huang B, Zhang M, Cao K, Yu L 2015 Int. J. Remote Sens. 36 4411 doi: 10.1080/01431161.2015.1083633 [6] Liu M X, Liu X N, Wu L, Zou X Y, Jiang T, Zhao B Y 2018 Remote Sens. 10 772 doi: 10.3390/rs10050772 [7] Zhou B, Zhang S B, Xue R B, Li J Y, Wang S S 2023 J. Environ. Sci. 123 3 doi: 10.1016/j.jes.2021.12.008 [8] Pang X B, Chen L, Shi K L, Wu F, Chen J M, Fang S X, Wang J L, Xu M 2021 Sci. Total Environ. 764 142828 doi: 10.1016/j.scitotenv.2020.142828 [9] Wu C, Liu B, Wu D, Yang H L, Mao X, Tan J, Liang Y, Sun J Y, Xia R, Sun J R, He G W, Li M, Deng T, Zhou Z, Li Y J 2021 Sci. Total Environ. 801 149689 doi: 10.1016/j.scitotenv.2021.149689 [10] Li X M, Xie P H, Li A, Xu J, Ren H M, Ren B, Li Y Y, Li J 2021 J. Environ. Sci. 107 1 doi: 10.1016/j.jes.2020.12.015 [11] Arroyo P, Gómez-Suárez J, Herrero J L, Lozano J 2022 Sens. Actuators B Chem. 364 131815 doi: 10.1016/j.snb.2022.131815 [12] Platt U, Stutz J, Platt U, Stutz J 2008 Differential Absorption Spectroscopy (Berlin Heidelberg: Springer) pp135–174 [13] Liu C, Xing C Z, Hu Q H, Wang S S, Zhao S H, Gao M 2022 Earth Sci. Rev. 226 103958 doi: 10.1016/j.earscirev.2022.103958 [14] Chen X, Chen Y P, Chen Y X, Fang Y X, Yu J X, Sun Y 2023 IEEE International Geoscience and Remote Sensing Symposium United States of America, July 16–21, 2023 p3866 [15] Xing C Z, Liu C, Li Q H, Wang S S, Tan W, Zou T L, Wang Z, Lu C 2024 Sci. Total Environ. 915 169159 doi: 10.1016/j.scitotenv.2023.169159 [16] Li L, Lu C, Chan P W, Zhang X, Yang H L, Lan Z J, Zhang W H, Liu Y W, Pan L, Zhang L 2020 Atmos. Environ. 220 117083 doi: 10.1016/j.atmosenv.2019.117083 [17] Mo Z W, Huang S, Yuan B, Pei C L, Song Q C, Qi J P, Wang M, Wang B L, Wang C, Shao M 2022 Environ. Pollut. 292 118454 doi: 10.1016/j.envpol.2021.118454 [18] Chen L, Pang X B, Li J J, Xing B, An T C, Yuan K B, Dai S, Wu Z T, Wang S Q, Wang Q, Mao Y P, Chen J M 2022 Sci. Total Environ. 845 157113 doi: 10.1016/j.scitotenv.2022.157113 [19] Zheng Z L, Wang H C, Chen X R, Wang J, Li X, Lu K D, Yu G H, Huang X F, Fan S J 2024 Atmos. Environ. 321 120361 doi: 10.1016/j.atmosenv.2024.120361 [20] Hedworth H, Page J, Sohl J, Saad T 2022 Drones 6 253 doi: 10.3390/drones6090253 [21] 刘进, 司福祺, 周海金, 赵敏杰, 窦科, 王煜, 刘文清 2015 物理学报 64 34217 doi: 10.7498/aps.64.034217 Liu J, Si F Q, Zhou H J, Zhao M J, Dou K, Wang Y, Liu W Q 2015 Acta Phys. Sin. 64 34217 doi: 10.7498/aps.64.034217 [22] Mou F S, Luo J, Zhang Q J, Zhou C, Wang S, Ye F, Li S W, Sun Y W 2023 Atmosphere 14 739 doi: 10.3390/atmos14040739 [23] Vandaele A C, Hermans C, Simon P C, Carleer M, Colin R, Fally S, Mérienne M F, Jenouvrier A, Coquart B 1998 J. Quant. Spectrosc. Radiat. Transf. 59 171 doi: 10.1016/S0022-4073(97)00168-4 [24] Bogumil K, Orphal J, Homann T, Voigt S, Spietz P, Fleischmann O C, Vogel A, Hartmann M, Kromminga H, Bovensmann H, Frerick J, Burrows J P 2003 J. Photoch. Photobio. A 157 167 doi: 10.1016/S1010-6030(03)00062-5 [25] Meller R, Moortgat G K 2000 J. Geophys. Res 105 7089 doi: 10.1029/1999JD901074 [26] Serdyuchenko A, Gorshelev V, Weber M, Chehade W, Burrows J P 2014 Atmos. Meas. Tech. 7 625 doi: 10.5194/amt-7-625-2014 [27] Thalman R, Volkamer R 2013 Phys. Chem. Chem. Phys. 15 15371 doi: 10.1039/c3cp50968k [28] Fleischmann O C, Hartmann M, Burrows J P, Orphal J 2004 J. Photochem. Photobiol. A Chem. 168 117 doi: 10.1016/j.jphotochem.2004.03.026 -
计量
- 文章访问数: 403
- HTML全文浏览数: 403
- PDF下载数: 3
- 施引文献: 0