
 首页
首页 登录
登录 注册
注册



-
为实施海洋生态保护、海洋安全保障等国家重大战略, 我国亟需发展海洋仿生航行器等深海装备[1]. 蝠鲼是一种兼具高效率滑翔与高机动扑动能力的大型鱼类, 能够根据洋流状态及海底环境, 自主选择弓形滑翔、连续扑动、滑扑结合或集群游动等多种模态的运动形式[2,3]. 以蝠鲼为原型的仿生航行器具有广域长时监测、复杂地形原位观测、生物同游抵近侦察等能力[4]. 为探究仿生航行器多模态游动机理, 提升水动力性能, 研究人员广泛采用计算流体力学(CFD)方法对蝠鲼进行数值仿真研究[5,6]. Wang等[7]使用浸没边界法对不同攻角下蝠鲼弓形滑翔水动力性能进行了数值模拟. Gao等[8,9]通过IB-SGKS算法分析了多条蝠鲼交错游动的流场机制, 并提出了提高集群推进效率的策略. 然而, 蝠鲼的数值模拟研究涉及三维柔性大变形非定常流场计算, 单工况模拟往往需要数十个CPU核时, 大量计算资源与时间消耗成为该方法的主要挑战.
近年来, 人工智能用于流场预测为降低CFD计算成本提供了新途径[10,11], 该方法在流场特征识别[12]、快速建模[13]、超分辨率重构[14]及多源数据融合[15]等领域均取得了显著成效. 在非定常流场重构预测中, Li等[16]利用多层感知机、卷积神经网络和对抗神经网络对高雷诺数三维圆柱流场进行了重构, 评估了算法的准确性、效率及泛化能力. Caraccio等[17]利用cGAN重构二维翼型速度场, 其精度较TCNN提高70%. Qiu等[18]采用变分贝叶斯卷积神经网络, 通过离散压力点信息预测泵喷推进器的瞬态速度场, 误差小于5%. Gao等[19]使用BP神经网络预测螺旋桨叶尖涡结构的演化, 与实验数据吻合良好. 以上研究证明了人工智能在流场重构中的准确性和可靠性, 但在蝠鲼流场研究中仍存在以下不足: 首先, 现有研究主要针对圆柱、机翼、螺旋桨等经典流场问题, 尚未应用于蝠鲼扑动模态非定常流场预报. 此外, 目前常用的深度、卷积等神经网络算法框架在处理复杂高维上采样问题时, 常受限于其非线性拟合和数据维度扩展能力; 对抗神经网络则在收敛性上存在挑战, 导致以上方法在实现蝠鲼运动参数到三维流场数据的映射问题上存在困难.
生成式人工智能(generative AI)通过学习现有数据分布, 能够生成具有相似特征但独立于原始数据集的新内容[20], 已在自然语言处理[21]、高质量图像和视频生成[22]等领域得到广泛应用, 并在高维数据上采样和寻找复杂非线性映射关系中展现出巨大潜力. 其中, Ho等[23]于2020年开发的去噪概率扩散概率模型(DDPM)因具备训练稳定性强、生成数据保真度高、泛化能力和噪声鲁棒性强等优势, 成为众多生成式模型的理论基础. 随后, 研究者们致力于提升扩散模型的数据处理能力与生成效率, 并提出了多种改进的神经网络结构. Rombach等[24]提出的潜在扩散模型(LDM)通过集成预训练的自动编码器, 大幅减少计算需求, 并在无条件图像生成和超分辨率重建任务中表现优异. DDIM模型通过跳过部分去噪生成步骤有效地提高了预测速度[25]. Nichol等[26]开发的GLIDE扩散模型则实现了由文本条件信息引导图像生成, 并显著地提高了生成质量. 在流体力学领域, DDPM的应用尚处于起步阶段. Huang等[27]利用基础概率扩散模型实现了火焰燃烧流场的超分辨率重构, 增强了视觉效果. Rybchuk等[28]通过潜在扩散模型预测大气层二维流场的未知区域信息, 生成了多样化的大气云图样本. 然而, 这些方法多为无条件扩散模型, 其输入通常为与流场数据维度匹配的随机噪声或流场信息扩散后的噪声数据, 生成结果的随机性较强, 且在可控预测任务中的适用性存在一定局限. 在实际工程需求中, 流场预报通常关注来流工况、边界条件等先验信息对流场演化的约束, 以实现可控、精确的预测. 因此, 发展基于条件信息引导的扩散模型, 使其能够从特定初始或边界条件、模型运动参数等推演流场的时空演化, 是当前扩散模型进行流场预测的重要研究方向.
综上, 本文提出了一种基于生成式人工智能条件扩散模型的蝠鲼扑动模态流场预测方法(surf-DDPM). 该方法通过输入扑动幅值和频率等运动参数, 能快速准确重构出蝠鲼表面流场信息, 为仿生航行器的柔性材料结构强度评估与精准控制提供数据支持, 并显著缩短研发周期. 第2节介绍了蝠鲼扑动模态流场仿真与数据集预处理; 第3节阐述了surf-DDPM的算法原理, 并展示噪声扩散结果; 第4节分析了超参数对预测结果的影响, 展示了速度与压力场的预报结果, 并对准确性与不确定度进行量化分析; 第5节总结了研究结论并提出展望.
-
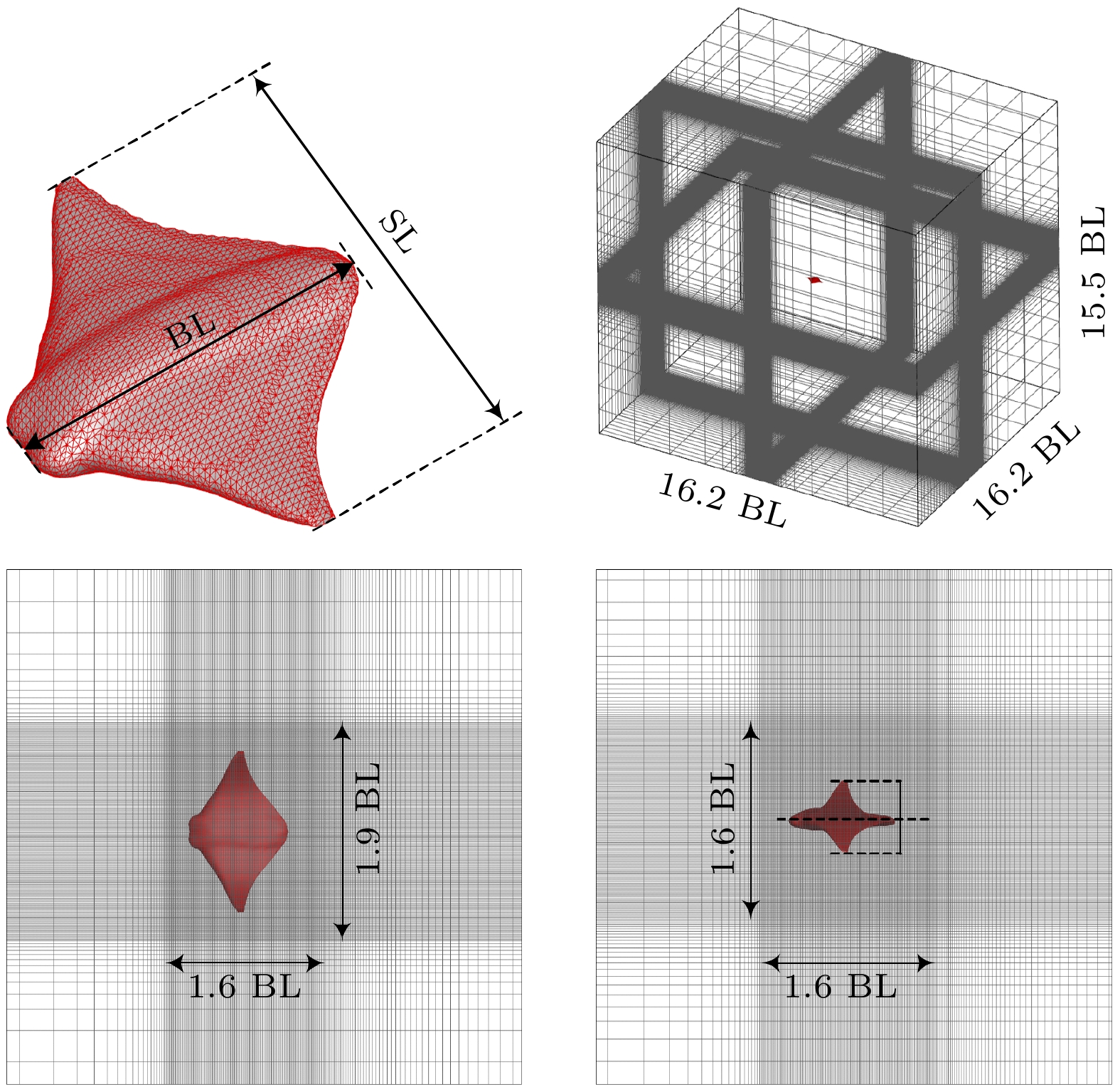
在此前的研究中, 我们对真实蝠鲼进行了观测和运动学建模, 并利用浸入边界法和球函数气体动理学格式(IB-SGKS)构建了蝠鲼扑动模态的非定常流场数值模拟方法[29,30]. 图1展示了蝠鲼计算模型及流场网格划分情况, 蝠鲼模型体长(BL)为1.85 m, 展长(SL) 2.9 m, 最大厚度(TL) 0.35 m, 使用ICEM软件生成模型表面非结构三角形面网格, 包含4414个节点. 这些节点随着蝠鲼扑动运动过程边界的变形而移动, 称作拉格朗日点. 流场部分通过均匀的六面体笛卡尔网格来离散计算域, 该节点被称为欧拉点, 流场范围设置为16.2 BL×16.2 BL×15.5 BL, 其中加密区大小为1.6 BL×1.9 BL×1.6 BL. 蝠鲼模型的运动控制方程为
其中
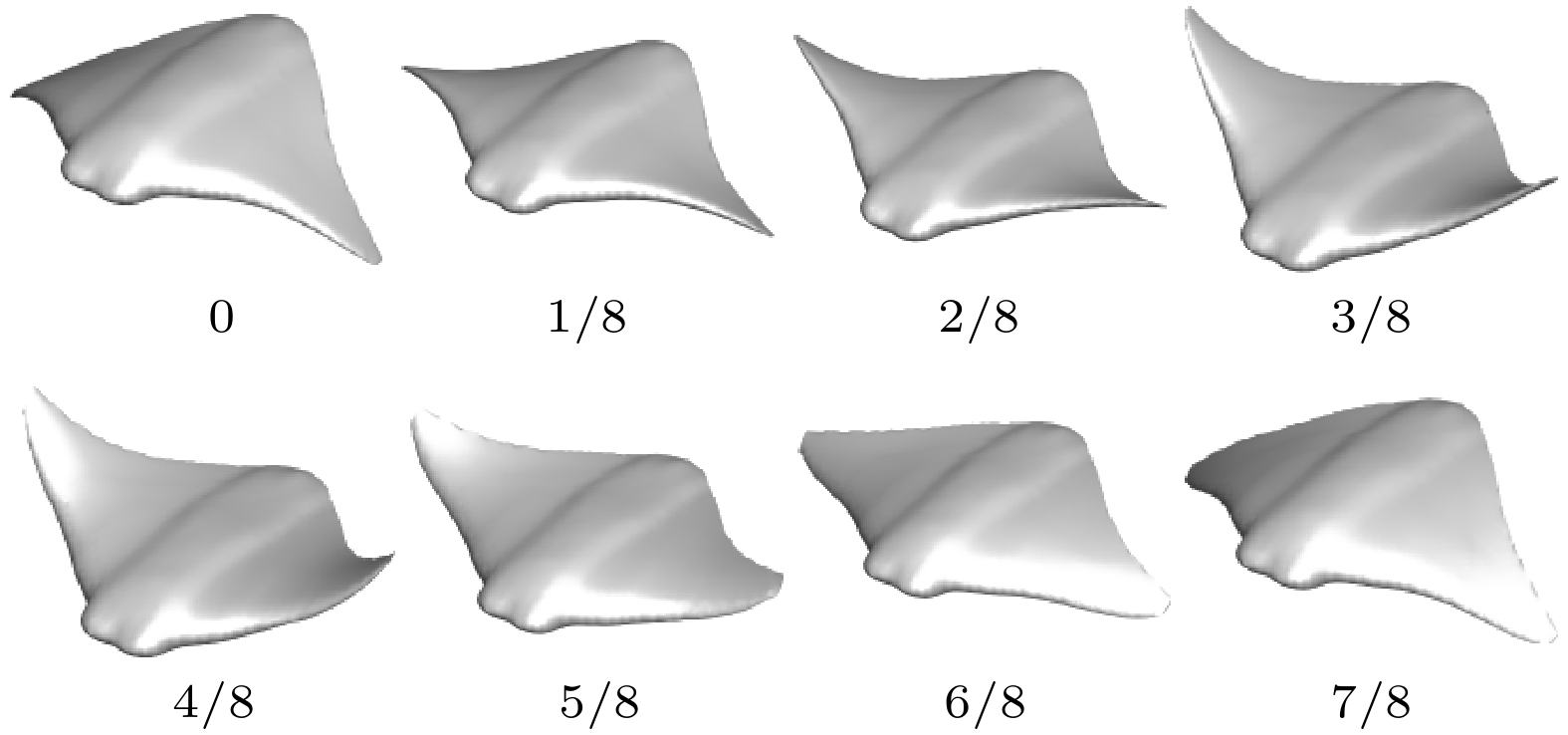
$ {\theta _{\max }} $ 与k是扑翼展向形变系数, W为扑翼弦向波数, f是扑动频率. 基于以上方程, 蝠鲼模型单周期内的运动模态如图2所示.流场仿真过程中, 模型表面三角形网格与流场笛卡尔网格间通过浸入边界法的思想, 结合光滑插值与最近点投影的几何技术, 以实现对模型边界与流域网格的耦合求解. 计算过程中, 拉格朗日节点上的变量通过Dirac delta函数插值与欧拉点上的变量进行关联, 如(2)式所示:
其中N为拉格朗日点的个数; M为每个拉格朗日点周围的欧拉点个数; h为流场网格中各方向上的网格间距; u为速度;
$ {\boldsymbol{x}}_{\text{B}}^I $ 为蝠鲼模型三角形网格边界上的坐标点;$ {{\boldsymbol{x}}_J} $ 为流场网格的坐标点$ D({{\boldsymbol{x}}_J} - {\boldsymbol{x}}_{\mathrm{B}}^I) $ 为连续分布delta函数, 其表达式为针对本文研究的蝠鲼三维多模态运动问题, 为确保变量在扑动过程中的平滑过渡, 每个拉格朗日点的物理量通过其周围64个欧拉点的变量插值获得. 在首次计算时, 采用地毯式搜索策略遍历所有欧拉网格节点, 并存储匹配的节点位置. 在后续时间步中, 搜索范围基于前一时间步存储的节点位置, 在6个方向上各延伸两个网格尺度, 以动态更新三角形面网格与六面体网格之间的物理量映射关系, 从而提高计算效率并确保数据插值的准确性.
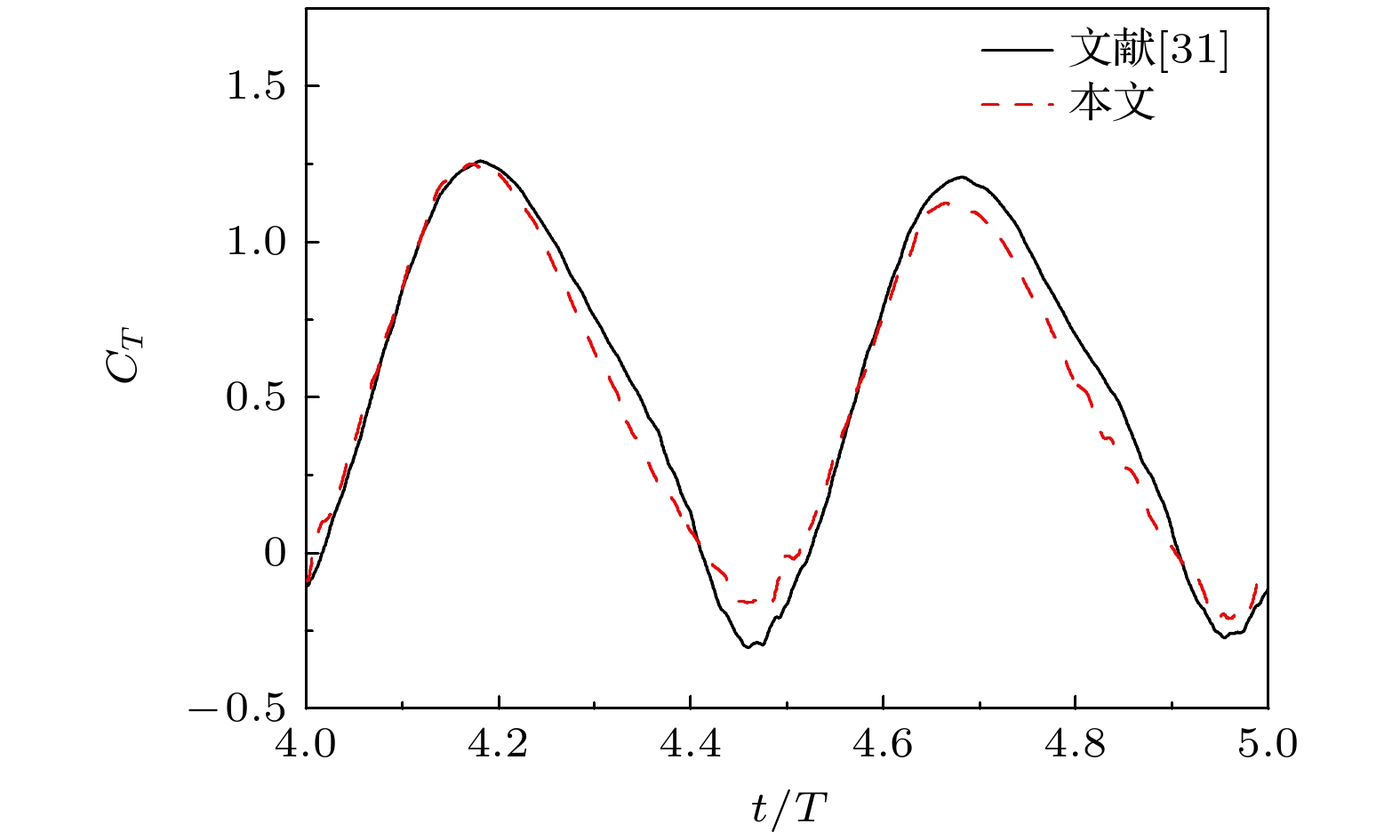
基于以上方法, 我们对蝠鲼多模态扑动运动状态进行流场数值模拟, 可调节的运动参数包括上扑幅值(Au), 下扑幅值(Ad)与扑动频率(f). 为结合已有文献数据验证仿真结果的有效性, 我们计算了相同流场环境Re = 1200, 相同扑动参数Au = Ad = 0.35 BL, f = 1 Hz, W = 0.4时的推力系数. 计算结果如图3所示, 与文献[31]相比, 推力系数曲线的峰值稍有差异, 但整体趋势基本符合, 说明本文方法所建立的数据集具备较高的准确性.
为获得充分且多样化的数据集, 本文对Au与Ad在[0.1 BL, 0.6 BL]范围内以0.1 BL为步长增长, f设置为[0.3, 0.5, 0.6, 0.7, 0.9] Hz的变量耦合工况进行仿真, 共获取180组扑动工况.
-
过拟合(overfitting)指神经网络模型在训练集上表现优异, 但在未知数据上性能显著下降的现象, 本质是模型过度拟合了训练数据中的噪声或特定样本特征, 导致泛化能力不足, 主要原因是数据样本量不足与数据分布缺陷. 数据增强指通过对原始数据集进行变换和处理, 扩展样本规模和多样性, 可有效地提升人工智能模型的泛化能力与鲁棒性, 降低过拟合风险. 针对如图3所示的蝠鲼模型周期性运动, 本研究通过在流场仿真过程中直接采样多时间步信息的方式, 同步完成数据增强. 该方法不仅能避免对高维流场数据进行维度重组、转置等增强操作时可能出现的逆过程不便与数据对齐错误风险, 也能减少仿真原始数据的预处理的负担. 如图4展示了不同扑动频率工况仿真过程中推力系数时序曲线, 可各频率对应的CFD收敛速度与单周期内时间步数各不相同. 为保证样本规模充足且数据分布规律, 避免数据异常值影响, 我们通过在每组工况的第三个稳定扑动整周期内, 均匀提取100个时间步流场信息的方式完成数据采样与增强, 具体采样的起始与间隔步数见表1. 通过该方法, 共获得18000组包含时空尺度信息的蝠鲼流场数据集, 为模型训练与验证提供了多样化且稳定的数据支持.
-
数据归一化指将原始流场数据转换到统一范围(通常为[0, 1])的过程, 以消除不同物理量之间的量纲差异, 防止数值较大的特征掩盖较小特征, 并增强模型的鲁棒性与拟合能力, 从而降低过拟合风险. 根据第2.2节所述方法求解获得蝠鲼模型多运动模态下三角形面网格上各节点的序号、坐标、压力与速度信息. 利用Tecplot软件可视化压力场与速度场云图, 如图5所示, 压力与速度值数据的分布区间分别在1与0附近范围波动. 为便于神经网络数据维度处理并避免引入奇异值, 我们在压力与速度场数据末端分别补1和0, 将4414个网格节点数据填充至5120个, 并在后续的神经网络处理过程中将维度重组为(5, 32, 32), 便于卷积模块进行数据处理. 随后采用最大最小归一化原理对每个节点的流场信息进行预处理处理, 如(3)式所示:
其中Pi指网格节点上的压力值, Ui为速度值, max与min分别指代整个数据集中所有网格节点上压力与速度的最大与最小值.
图6展示了当输入运动参数(Au, Ad, f)分别设定为(0.6 BL, 0.6 BL, 0.9 Hz)与(0.1 BL, 0.1 BL, 0.5 Hz)时, 各面网格节点上压力与速度物理量的仿真数据以及最大最小归一化后的结果. 可见各物理量分布于不同数值区间, 且峰谷值的波动范围在原始数据尺度上难以直观辨识. 经归一化处理后, 数据的波动范围变得显著, 可视化程度得到提高, 且所有数值都被规范到了[0, 1]的范围内.
基于2.2节所述的增强数据构建流场数据集, 并为每组流场数据添加标签(Au, Ad, f, tstep, P)及(Au, Ad, f, tstep, U). 我们将扑动频率f为[0.3, 0.5, 0.7, 0.9] Hz的数据全部划分为训练集, 将频率为0.6 Hz且幅值Au为[0.2, 0.4, 0.6] BL的数据作为验证集, 其余数据划分为测试集. 此方法确保了各数据集中扑动工况的互不重叠, 且数据比例为8∶1∶1. 最后, 我们对三组数据集分别进行随机排列, 以消除训练批次(batch)间潜在的数据分布偏差, 确保模型训练的稳定性.
-
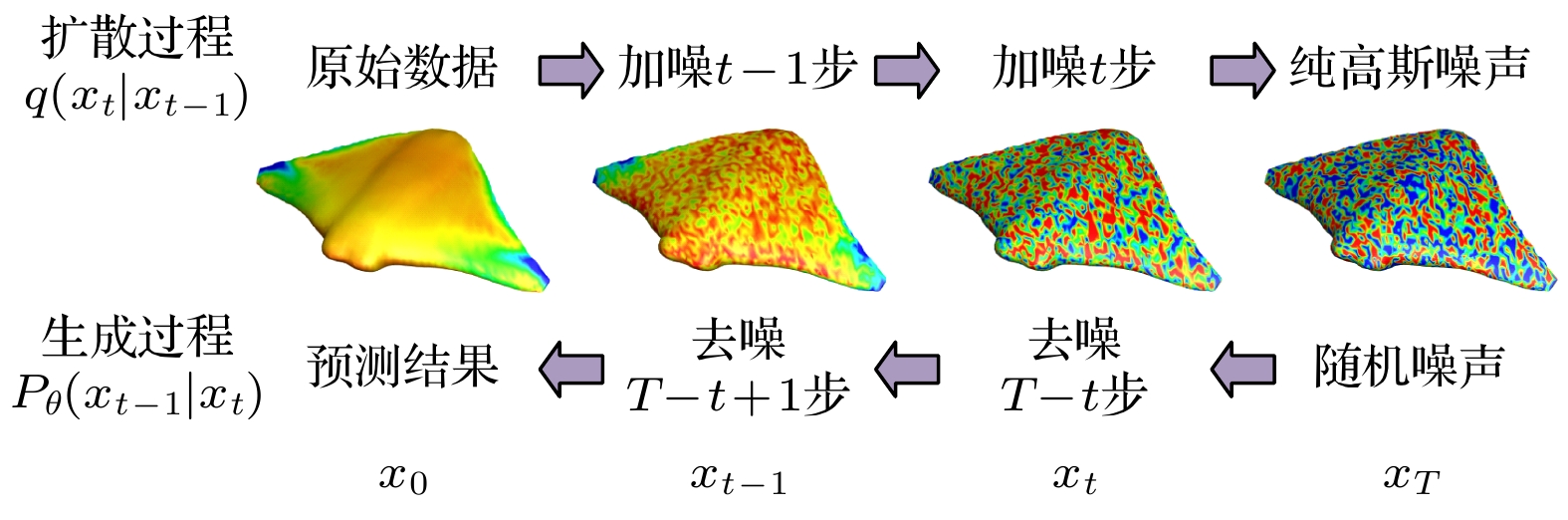
去噪扩散概率模型(denoising diffusion probabilistic models)是一种基于渐进噪声处理的生成式人工智能模型, 通常用于图像生成和修复. 该算法的逻辑是通过将数据逐步添加噪声进行破坏, 然后训练一个神经网络来逐步消除噪声, 重建原始数据. 因此, 该模型包括前向噪声扩散过程与反向去噪生成过程两个部分, 原理如图7所示. 前向扩散过程即向原始数据中逐步添加噪声, 其本质是一个马尔科夫链, 最终流场信息会被扩散为纯高斯噪声, 该过程可由(4)式表示. 反向生成过程如(5)式, 旨在从噪声中逐步恢复原始样本.
其中
$ {x_0} $ 是原始数据,$ {x_t} $ 为扩散t步噪声后的数据,$z\sim N(0, 1) $ 是纯高斯噪声,$ {\beta _t} $ 是噪声调度时间表函数, I为单位矩阵,$ {\mu _\theta }({x_t}, t) $ 是人工智能模型计算所得的去噪的均值,$\displaystyle \sum t $ 为方差.对原始输入数据
$ {x_0} $ , 该人工智能模型的训练过程如下: 逐步向$ {x_0} $ 添加噪声, 直至达到设置的总时间步T; 其次, 通过训练神经网络, 找出时间步t与t – 1之间的噪声数据映射关系; 最后, 将高斯噪声输入神经网络, 逐步预测出[T – 1, T – 2, ⋅⋅⋅, 1]时间步的数据, t = 1时的数据即为最终预测结果. -
本文建立的surf-DDPM神经网络在去噪扩散概率模型算法的基础上, 对输入的流场云图数据嵌入了扑动运动参数标签, 使模型能够生成研究所需且可控的结果, 而非噪声空间映射出的随机云图. 该神经网络的主体结构为U-Net架构, 并结合了标签嵌入神经网络模块与Transformer自注意力机制模块, 如图8所示.
标签嵌入神经网络模块如图8(a)所示, 首先将扑动运动参数标签通过全连接层与Transformer模块嵌入, 生成一段数据序列. 随后该序列被复制, 形成两条并行序列. 复制序列A通过层正则化(LayerNorm)方法进行处理, 生成输入序列1. 这里使用LayerNorm方法是因为该运算过程不依赖训练批次大小(batch size), 适合在Transformer模块后进行特征处理, 同时LayerNorm可以确保模型训练过程中的数据分布稳定在特定区间, 提高模型收敛性, 减小过拟合风险. 所得复制序列B与经时间编码模块处理后的噪声扩散时间步T的数据进行相加, 融合得到输入序列2. 标签嵌入神经网络的时间编码模块的原理如(6)式所示:
其中t∈[0, T]是当前加噪时间步, d为时间编码维度.
我们将流场CFD数据序列称为输入序列3, 与输入序列1与2同时作为U-Net的输入变量, 融合得到的新序列用于进行后续去噪生成模型的训练. 图8(b)展示了一个有两层下采样层的U-Net, 可通过输入加噪时间步t的融合了扑动参数的表压及速度场数据, 输出对应t–1时间步的流场. U-Net是一种卷积神经网络架构, 包括编码器(下采样)与解码器(上采样)两条路径. 编码器用于提取特征并缩小空间维度, 解码器则用于恢复数据的原始大小. 每层路径中加入跳跃连接, 使上采样过程能够直接利用低级特征, 从而防止随网络加深而造成的数据丢失, 提高算法的鲁棒性.
图8(c)展示的Transformer自注意力机制模块是一种擅长处理“序列-序列”预测任务的神经网络模型, 对长序列数据间的相互关系学习能力良好. 自注意力机制使模型在处理序列种的每个元素时, 可以通过三个权重矩阵Q, K, V同时融合其他元素的信息, 并通过多头注意力机制使该计算过程并行化, 以至于模型可以在不同子空间内学习信息. 算法原理表示为
其中Attention表示自注意力机制模块输出; Multihead表示多头注意力机制模块输出; concat表示直接连接合成数据; W表示权重矩阵; X为输入序列数据.
-
超参数是人工智能模型训练前需要人工设置的参数, 不参与模型自身学习过程, 但用于控制模型的训练性能. 在surf-DDPM流场预测框架中涉及到多种超参数, 如噪声调度时间表函数、噪声扩散步数、学习率、U-Net下采样层数、Transformer模块层数、正则化参数、注意力头数、数据批次大小等. 考虑到超参数对模型预测精度的关键影响, 本文重点探讨U-Net下采样模块层数、噪声调度时间表函数
$ {\beta _t} $ 及加噪总时间步数T对预测性能 的影响. 其中, U-Net下采样模块层数直接决定 了神经网络的结构、特征提取能力和中间层的数 据维度, 从而影响模型训练效率与预测精度. 噪声调度时间表函数和加噪总时间步数则主要决定扩散模型在前向扩散过程中每个时间步向流场数据中添加的噪声量及扩散步长, 从而影响U-Net去噪过程的模型输入输出. 此外, 扩散时间步数T还直接影响模型的采样效率与生成预测速度. 通常扩散模型的噪声调度时间表函数可以选择线性、余弦、Sigmoid与二次函数四种计算方法, 如(8)式所示:其中本文定义βmin与βmax值分别为0.0001与0.02.
损失函数在神经网络中用于监督模型训练, 评估预测性能. 对于蝠鲼表面流场数据的结构特征, 本文采用Huber损失函数:
其中y为真实值; f(x)为模型预测值; δ是一个阈值, 本文将其定义为0.5. 该函数是一种多用于回归预测的损失函数, 结合了均方误差与绝对误差的优点, 在数据存在突变值时表现良好, 能减小离群点的影响, 提高模型鲁棒性.
本研究蝠鲼表面流场数据集大小为1.15 G, 人工智能模型基于pytorch2.3.1架构搭建, 使用A800-PCIE-80 GB型号图形处理器进行训练, 优化器选择为Adam. 本文的神经网络模型核心部分与训练中tensorboard日志文件均上传至Github:
https://github.com/lingke12138/surf-DDPM . -
本节展示3.3节所述各超参数对模型训练效果的影响, 每种方案均训练20000步. 图9(a)展示了四种噪声调度时间表函数的预测误差曲线, 其中线性函数的收敛速度最快, 经过10000步训练后达到收敛, 且损失值可收敛至最低, 可达0.0009. 由图9(b)可得, U-Net的网络层数并非越深训练效果越好, 模型层数为2和4时, 收敛性几乎相同, 而三层下采样层数对应的模型收敛性最佳, 最优检查点处的损失函数比前两者降低了近30%. 图9(c)展示了噪声扩散步数为10—1000步的模型训练效果, 随着扩散时间步数的增加, 模型可收敛至更小的误差损失值. 然而, 由于surf-DDPM算法的生成过程需要的去噪步数与扩散步数相同, 该超参数会直接影响蝠鲼流场的预测效率. 因此, 本文在后续实验中选择T = 1000构建最终的神经网络模型.
-
结合第4.1节优化后的模型超参数设置, 本节选取训练样本之外的两组蝠鲼扑动工况进行预测结果可视化, 其扑动参数分别为: (Au, Ad, f) = (0.6 BL, 0.5 BL, 0.6 Hz)和(0.7 BL, 0.8 BL, 1 Hz), 代表了训练样本分布的内插工况与外推工况, 旨在直观展示surf-DDPM模型对蝠鲼多时空尺度非定常流场的预测结果及其泛化能力. 图10和图11分别展示了内插与外推工况下, 蝠鲼模型表面压力场与来流方向速度场的预测结果与误差云图. 图10(a)—(i)与图10(j)—(r)分别为压力场与速度场的预测结果. 其中图10(a)—(c)三列分别表示流场CFD计算真值、人工智能模型预测结果与绝对误差云图. 图10(a)、图10(j)、图10(d)、图10(m)、图10(j)、图10(p)则分别表示单周期内扑动时间步tstep = 1, 26, 51的预测结果, 分别表示上扑极值、水平与下扑极值三种运动姿态, 后续统一称这三种姿态为d1, d2, d3. 由图10可见, 对于内插工况, surf-DDPM 模型能够准确重现压力场与速度场的整体分布, 在不同扑动阶段均能较好地刻画高低压区分布特征, 且能够准确捕捉到d2姿态下前游速度相对更大的游动特征. 对预测误差进行分析, 在d1与d3位置, 压力场预测误差主要集中在模型的翼尖位置, 误差值随着靠近翼尖而增大. 图8(b)中可见, d1位置的预报结果在扑翼处存在环状噪点样误差, 但结合图8(c), 误差值在可接受范围内, d1与d3位置的相对误差极值分别为1%和3%. 在d2位置, 误差主要分布在扑翼上表面, 最大误差小于1%. 由于在模型翼展2.9 m, Re = 1200的工况下, 蝠鲼模型表面尤其是躯干部分的速度值趋近于0, 为防止过小的分母导致相对误差被极度放大, 我们对速度场的误差分析采用绝对误差的方式进行. 速度场的预测误差主要集中在前缘、翼尖与尾缘区域, 误差最大的位置在d3位置的翼尖区域, 绝对误差为0.006 BL/s. 图11显示, 对于外推工况, 模型预测误差的分布模式与内插工况基本一致, 均集中在翼尖等物理量梯度较大的区域, 尤其在d3位置速度场误差较为明显. 此外, d2位置外推工况下的压力场与速度场预测误差均高于内插工况, 但其他区域误差差异不大. 总体而言, 模型在外推工况下仍能较好地拟合整体流场分布, 表明其具有一定的泛化能力. 对于神经网络模型在流场数据梯度变化较大处预测误差相对较高这一问题, 我们有以下改善思路: 1)通过频域分解+自适应滑窗的方法, 将原始CFD数据处理为高频与低频两个部分分别喂入神经网络进行数据拟合, 提高对流场细节的捕捉能力; 2)在去噪生成神经网络中引入额外的自注意力机制与通道注意力模块, 以增强模型对物理量高梯度变化处的局部特征的学习能力. 我们将在后续的工作中对以上方法做进一步研究.
-
本节选择了三种统计参数均方根(RMSE)、峰值信噪比(PSNR)及结构相似系数(SSIM)值定量分析surf-DDPM方法在预测蝠鲼表面流场方面的准确性, 以上评判指标分别由(10)式定义.
其中xi为估计值; yi为实际值; N为样本数量; maxi是预测结果中的最大值; μx与σx是预测结果的平均值与方差; μy与σy是实际结果的平均值与方差; σxy是协方差; C1与C2为常数项, 避免除0. RMSE评估预测值与实际值之间的差异, 该值越小表示结果越准确. PSNR基于均方误差(MSE)定义, 当PSNR≥35 dB时, 说明预测有较高精度. SSIM是一种计算机视觉领域评估两幅图像相似度的指标, 包含亮度、对比度和结构三个相对独立的变量, 常用于衡量模型生成图像的真实性, 其数值越接近1, 说明准确性越高, 当SSIM≥0.9时, 即可说明预测结果满足精度需求.
表2展示了蝠鲼不同扑动姿态下内插与外推变量预测结果的误差评估指标分布情况, 其中d1-P, d2-P, d3-P分别代表上扑、中间与下扑姿态的压力场预测结果, 速度解释类似. 通过RMSE值对比可得, 两种变量测试结果均在水平扑动姿态下预测全局误差最小, 内插预测结果压力与速度场的均方根分别为0.0122与0.0146, 外推工况为0.0233与0.0261. 上下扑极值位置误差稍大, 是由于在以上极端姿态下, 水动力学的数据的复杂性增加, 且相邻网格节点间的数据变化梯度增加, 导致预测难度与误差增大. 基于PSNR与SSIM值的准确性分析结果具有与前者相同的规律, 压力场与速度场预测结果的最大误差分别出现在d1与d3位置. 但总体来看, 内插工况PSNR最小值为35.931 dB, SSIM最小值为0.9524, 外推工况二者最小值分别为35.158 dB与0.9496, 均满足前述35 dB与0.9的指标要求, 表明本文提出的方法可以高精度地预测流场.
由图10、图11可得, 预报误差多集中于翼尖区域. 因此, 我们对y轴方向距蝠鲼垂直对称面1.4 m处的所有面网格节点上的流场信息进行了不确定度(uncertainty)评估. 在深度学习研究中, 不确定度是评估模型预测可靠性的重要指标, 常见的不确定度量化方法包括方差分析、贝叶斯不确定度估计、蒙特卡罗方法、置信区间、预测区间等. 本研究通过95%预测区间对流场预测的不确定度进行分析, 它表示了某个范围内包含真实值的概率为95%, 预测区间范围越小, 表示人工智能模型在该区域的预报可靠程度越高; 同时, 若预测结果曲线落在预测区间内, 说明结果具有可信性. 预测区间的计算方法如(11)式所示:
其中, t为分布的临界值, s为样本标准差, N为样本数.
图12给出了压力场与速度场在d1, d3扑动姿态下的不确定度分布, 其中图12(a), (b)表示d1姿态的压力与速度场, 图12(c), (d)同理. 可见除d1姿态下少数网格节点上的压力场预测值, 流场预测存在最大误差的翼尖位置处预测结果基本均位于95%置信区间范围内. 且预测值与真实值的变化趋势与极值等拟合情况良好, 这验证了模型在该区域的预报具有较高的可靠性.
-
在计算效率方面, 我们对比了蝠鲼在不同扑动频率下的CFD计算时间与surf-DDPM方法的训练和预测时间. CFD计算耗时是按照完成三个整周期扑动计算进行评估, 而人工智能预测耗时则对全测试集取平均值, 结果如表3所列. 从表3可以看出, 传统CFD方法由于扑动频率减小导致单周期所需计算的时间步数增多, 单工况耗时需要36—120个CPU核时不等. 此外, 为获取足够的运动参数组合结果, 往往需要计算百余组工况. 人工智能方法由于数据集可全部喂入神经网络, 因此仅需完成超参数优化的几次模型训练, 每组超参数训练时间约为24 GPU卡时. 按本文的1000步噪声扩散时间步为例, 完成模型训练后, 单工况的预测结果生成时间(即马尔可夫链的去噪生成时间)约为30 s. 综上, 与传统CFD方法相比, 使用人工智能方法来获取精确的蝠鲼表面流场所需时间大幅减少, 提升效率99.97%以上, 展示了该策略的高效性.
-
本研究提出了一种基于去噪概率扩散模型(surf-DDPM)的生成式人工智能方法, 实现了通过输入运动参数高效预测蝠鲼扑动过程中表面压力与速度场的演化. 首先, 采用IB-SGKS算法求解了180组扑动工况, 并通过数据增强将其扩展至18000组时空尺度流场数据, 建立了蝠鲼多模态扑动流场数据集. 其次构建了基于高斯噪声扩散过程与U-Net+Transformer结构的去噪生成网络, 并优化了模型超参数配置. 最后, 采用内插与外推工况测试模型的预测性能, 并结合误差分析、不确定度量化与计算效率对比, 全面评估了模型预测能力. 研究结果表明:
1)人工智能模型构建方面, surf-DDPM预测模型的最优超参数组合为: 线性噪声调度时间表函数、1000步噪声扩散时间步及3层下采样的U-Net结构. 在该配置下, 模型收敛速度最快, 误差损失值最低, 并显著提升了去噪生成的计算效率;
2)流场预测精度与泛化能力方面, surf-DDPM 在内插与外推测试工况下均能准确拟合流场分布, 表明模型具备一定泛化能力. 误差主要集中于翼尖、前缘与尾缘等高梯度变化区域, 其中外推工况在水平扑动位置的预测误差高于内插工况, 但整体误差水平相近. 定量评估结果表明, 所有预测结果均满足PSNR≥35 dB, SSIM≥0.9, 且落入CFD真值的95%预测区间, 证明模型预测精度较高;
3)流场预测效率方面, surf-DDPM 模型仅需一次24 h训练, 即可在30 s内完成单工况表面流场预测. 相比于传统CFD 36—120 h的单工况计算时间, 人工智能方法显著地降低了计算成本, 并大幅提升了流场数据获取效率.
综上所述, surf-DDPM 在保证预测精度的同时, 大幅降低了CFD计算成本, 展现出在复杂非定常流场建模中的应用潜力. 未来研究可进一步优化模型结构, 降低高梯度区域误差, 以进一步增强预测精度与泛化能力.
基于去噪概率扩散模型的蝠鲼流场智能化预测
Intelligent prediction of manta ray flow field based on a denoising probabilistic diffusion model
-
摘要: 为解决传统数值模拟方法在蝠鲼三维柔性大变形流场仿真中计算资源与时间上的局限性, 本文提出一种基于去噪概率扩散模型的生成式人工智能方法(surf-DDPM), 通过输入运动参数变量组, 预测蝠鲼表面流场. 首先, 采用浸入边界法和球函数气体动理学格式(IB-SGKS)建立蝠鲼扑动模态的数值计算方法, 获取了在0.3—0.9 Hz频率和0.1—0.6倍体长幅值条件下共180组非定常流场数据集. 其次, 构建了噪声扩散过程的马尔科夫链和去噪生成过程的神经网络模型, 并将运动参数与扩散时间步标签嵌入网络, 完成模型训练. 最后, 验证了神经网络超参数对模型预测的影响, 并可视化了未参与训练的多扑动姿态压力场和速度场预测结果, 进行预报结果准确性、不确定度与预测效率量化分析. 结果显示, 该模型实现了具有大跨度高维上采样特征的蝠鲼表面流场数据的快速准确预测, 预报结果全部位于95%置信区间内, 单工况预测相较CFD方法效率提升99.97%.Abstract: The manta ray is a large marine species, which has the ability of gliding efficiently and flapping rapidly. It can autonomously switch between various motion modes, such as gliding, flapping, and group swimming, based on ocean currents and seabed conditions. To address the computational resource and time constraints of traditional numerical simulation methods in modeling the manta ray’s three-dimensional (3D) large-deformation flow field, this study proposes a novel generative artificial intelligence approach based on a denoising probabilistic diffusion model (surf-DDPM). This method predicts the surface flow field of the manta ray by inputting a set of motion parameter variables. Initially, we establish a numerical simulation method for the manta ray’s flapping mode by using the immersed boundary method and the spherical function gas kinetic scheme (IB-SGKS), generating an unsteady flow dataset comprising 180 sets under frequency conditions of 0.3–0.9 Hz and amplitude conditions of 0.1–0.6 body lengths. Data augmentation is then performed. Subsequently, a Markov chain for the noise diffusion process and a neural network model for the denoising generation process are constructed. A pretrained neural network embeds the motion parameters and diffusion time step labels into the flow field data, which are then fed into a U-Net for model training. Notably, a transformer network is incorporated into the U-Net architecture to enable the handling of long-sequence data. Finally, we examine the influence of neural network hyperparameters on model performance and visualize the predicted pressure and velocity fields for multi-flapping postures that were not included in the training set, followed by a quantitative analysis of prediction accuracy, uncertainty, and efficiency. The results demonstrate that the proposed model achieves fast and accurate predictions of the manta ray’s surface flow field, characterized by extensive high-dimensional upsampling. The minimum PSNR value and SSIM value of the predictions are 35.931 dB and 0.9524, respectively, with all data falling within the 95% prediction interval. Compared with CFD simulations, the single-condition simulations by using AI model show that the prediction efficiency is enhanced by 99.97%.
-
Key words:
- manta rays /
- fluid mechanics /
- artificial intelligence /
- flow field prediction .
-

-
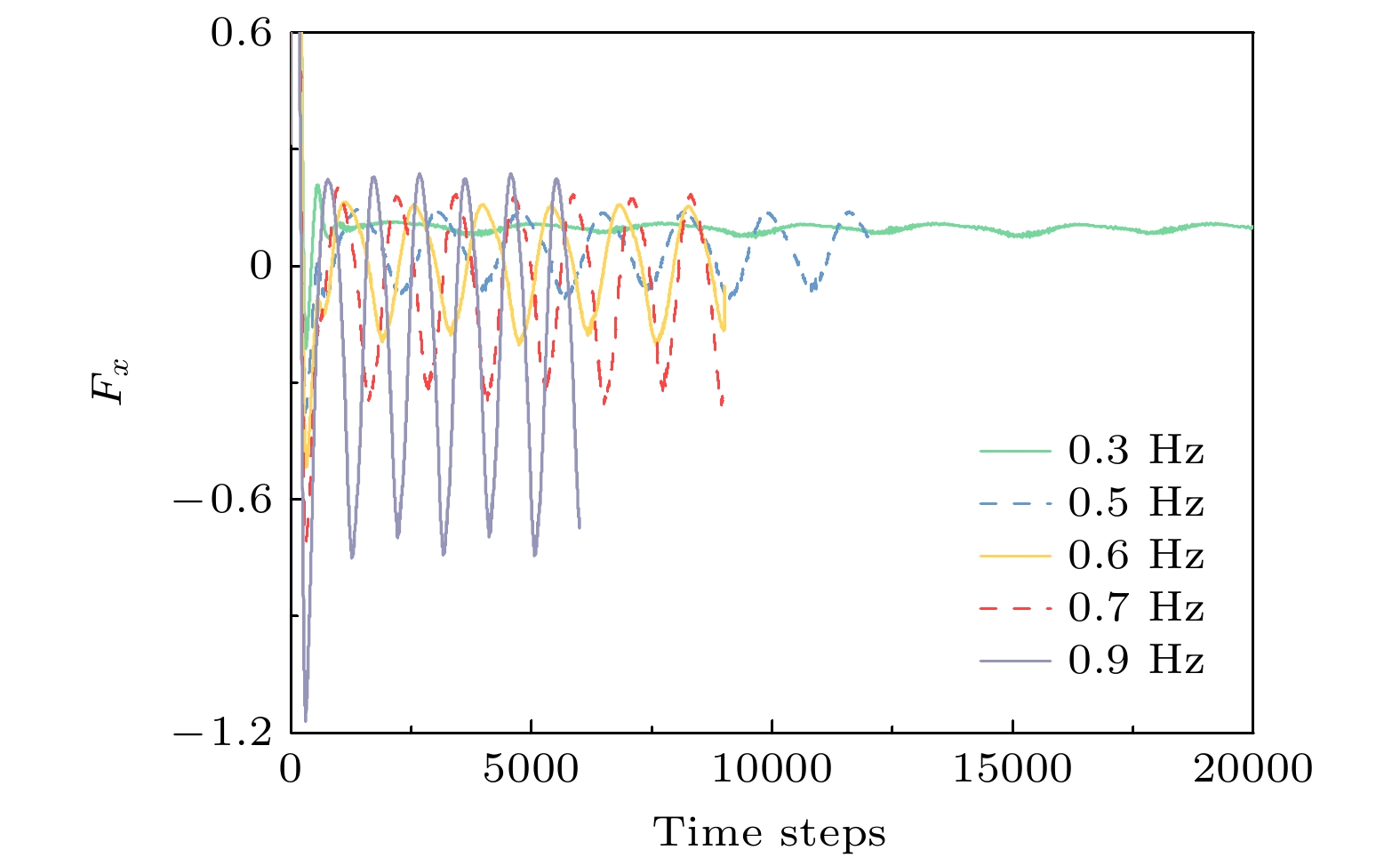
图 4 不同扑动频率对应CFD仿真时间步数
Figure 4. CFD simulation time steps corresponding to different flapping frequencies.
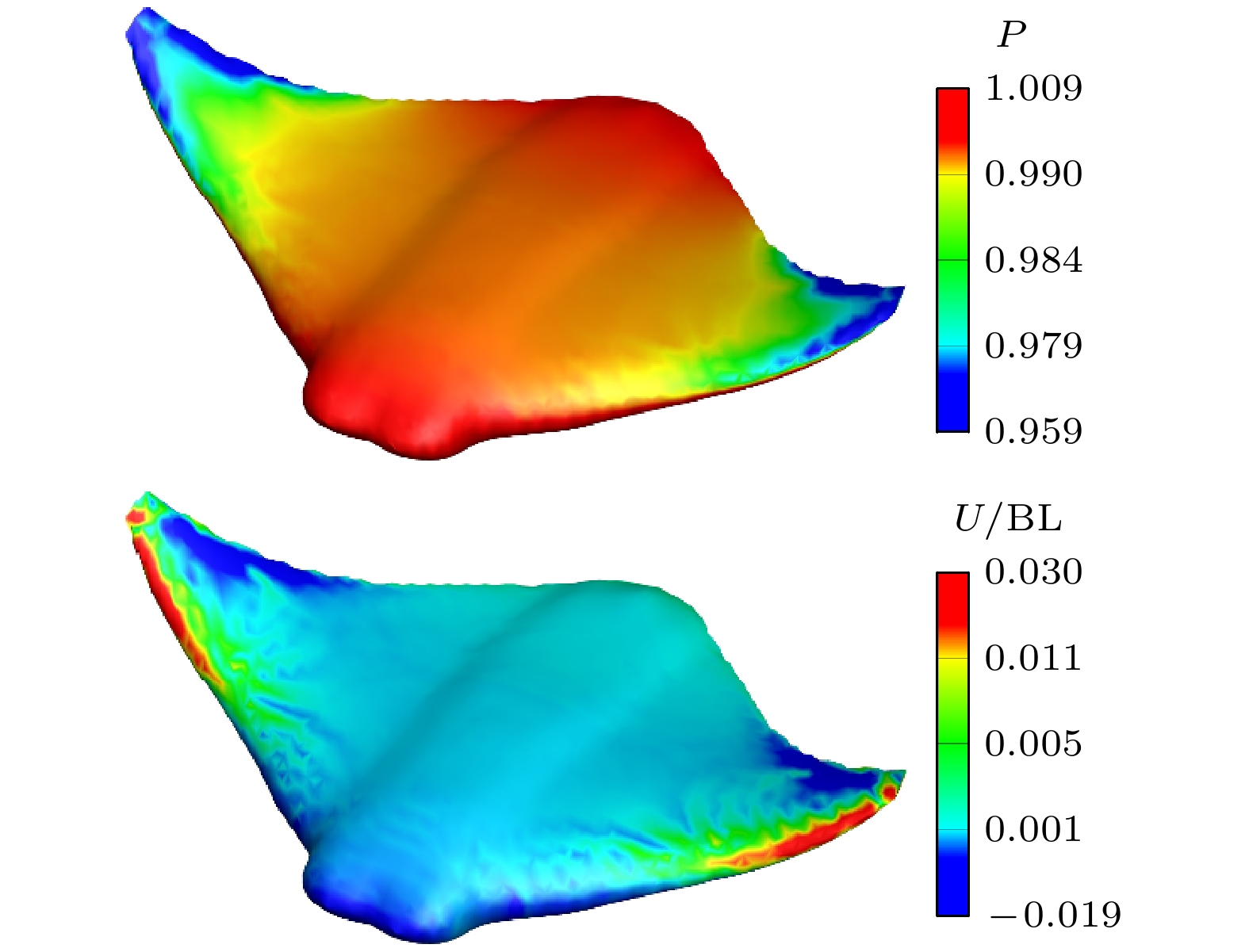
图 5 蝠鲼表面流场数值模拟压力与速度场云图
Figure 5. Pressure and Velocity Field Contours in Numerical Simulation of Manta Ray Surface Flow Dynamics.
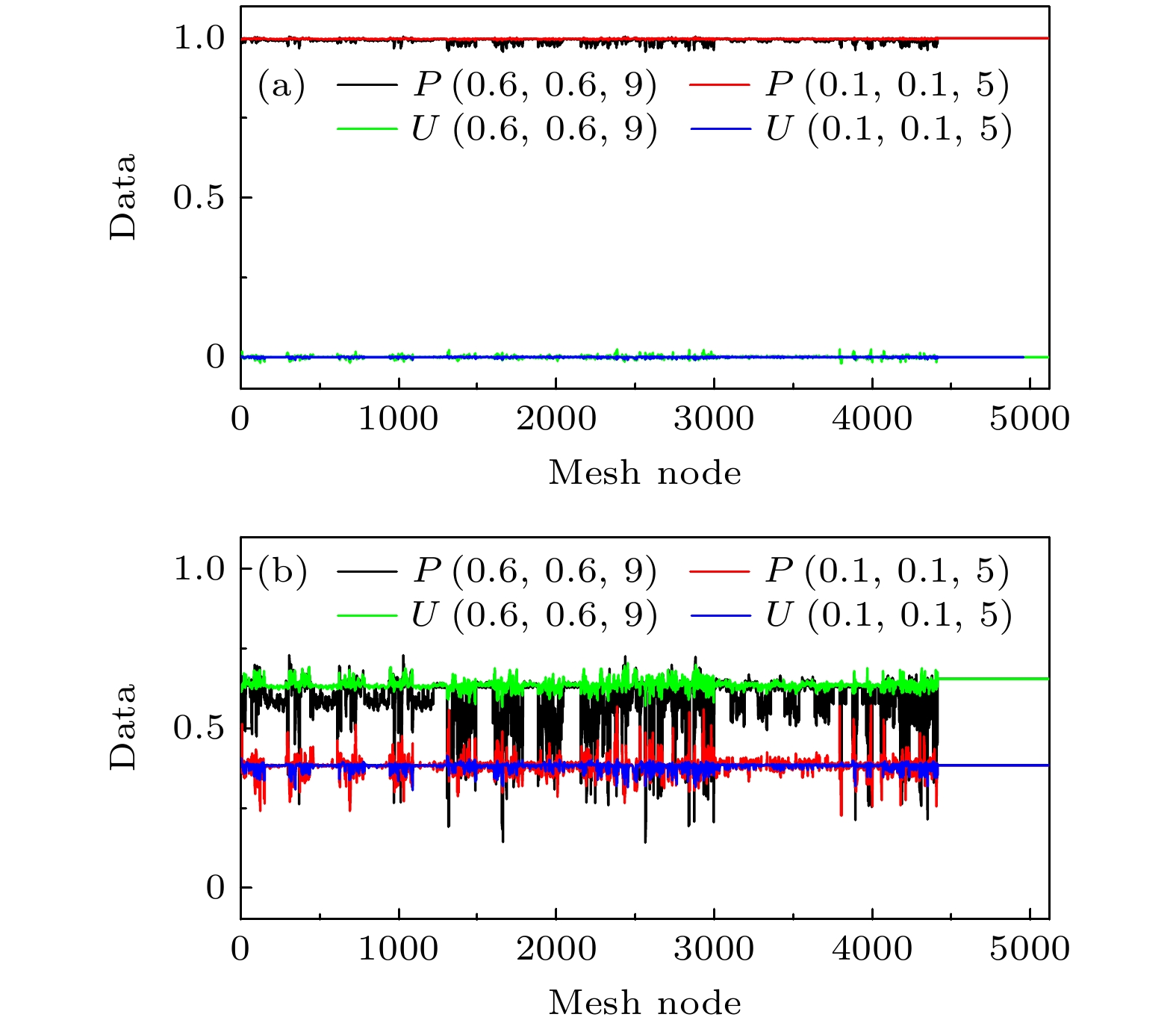
图 6 原始数据填充与归一化处理结果对比
Figure 6. Comparison of original data padding and normalized processing results.
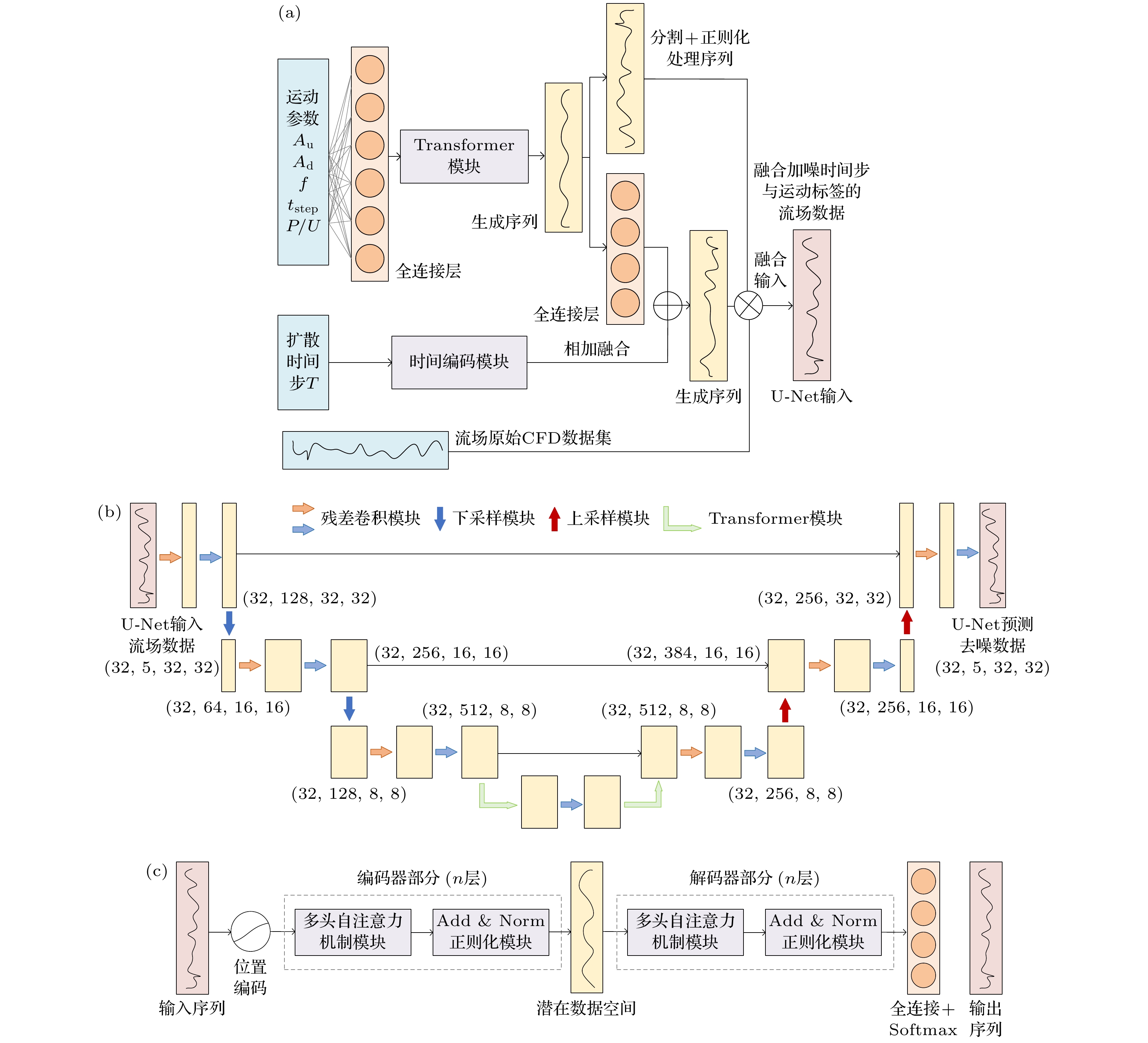
图 8 surf-DDPM神经网络算法框图 (a)运动参数与噪声扩散时间步嵌入模块; (b) U-Net去噪生成模块; (c) Transformer自注意力机制模块
Figure 8. The surf-DDPM neural network algorithm flowchart: (a) Motion parameters and noise diffusion time step embedding module; (b) U-Net denoising generation module; (c) transformer self-attention mechanism module.
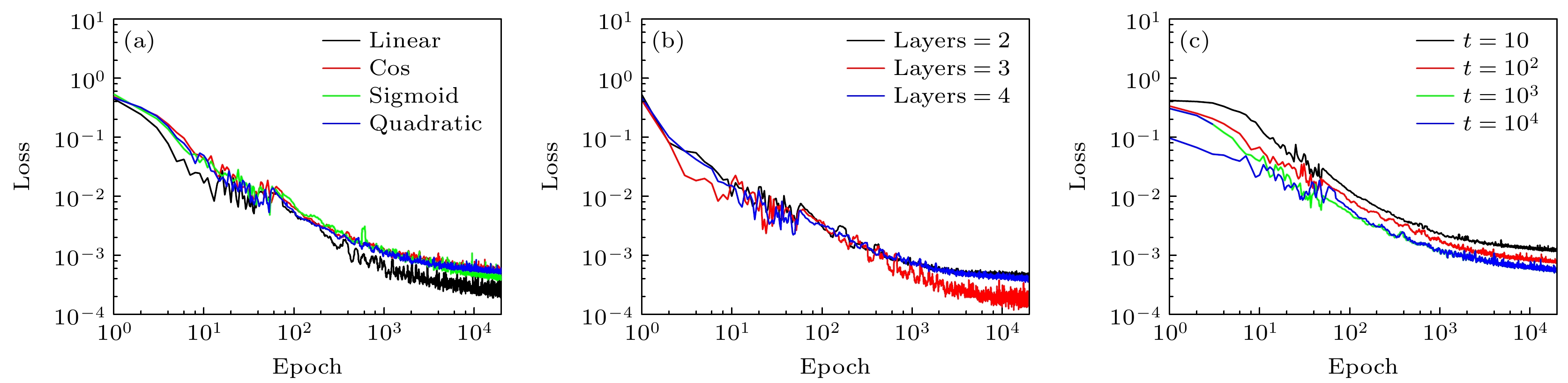
图 9 超参数影响分析 (a)噪声调度时间表函数影响; (b) U-Net的网络层数影响; (c)噪声扩散步数影响
Figure 9. Hyperparameter impact analysis: (a) Effect of noise scheduling function on results; (b) impact of U-Net network depth on performance; (c) effect of noise diffusion steps on generation quality.
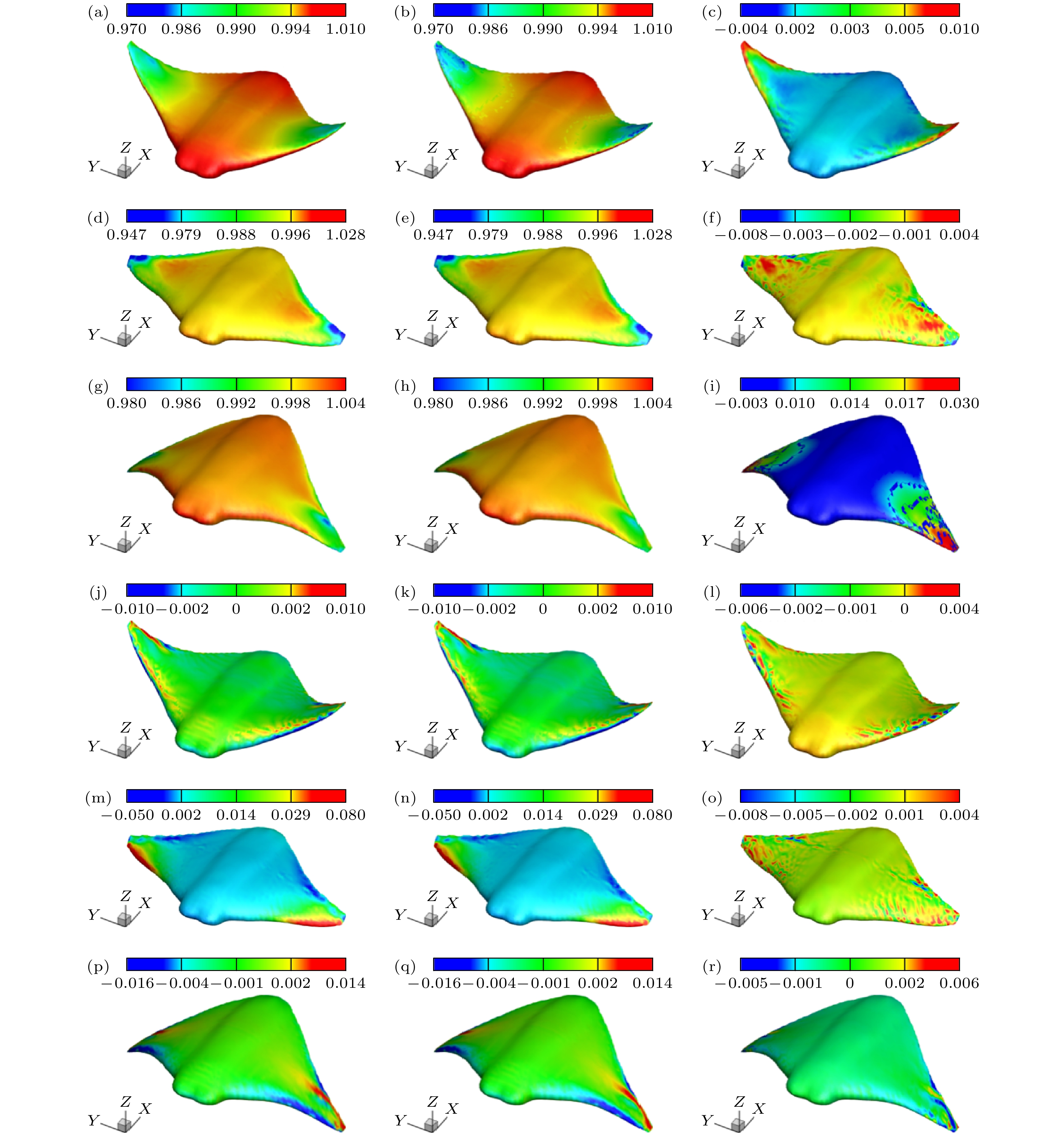
图 10 内插测试工况压力与速度场预测结果与误差 (a), (d), (g)压力场CFD计算真值; (b), (e), (h) surf-DDPM人工智能模型预测结果; (c), (f), (i)预测值误差云图; (j), (m), (p)速度场CFD计算真值; (k), (n), (q) surf-DDPM人工智能模型预测结果; (l), (o), (r)预测值误差云图
Figure 10. Predicted results and errors of surface pressure and velocity fields for the interpolation test case: (a), (d), (g) True values of dynamic pressure field from CFD simulations; (b), (e), (h) pressure field predicted by surf-DDPM AI model; (c), (f), (i) absolute error contour of pressure field; (j), (m), (p) true values of velocity flow field from CFD simulations; (k), (n), (q) velocity field predicted by surf-DDPM AI model; (l), (o), (r) absolute error contour of velocity field.
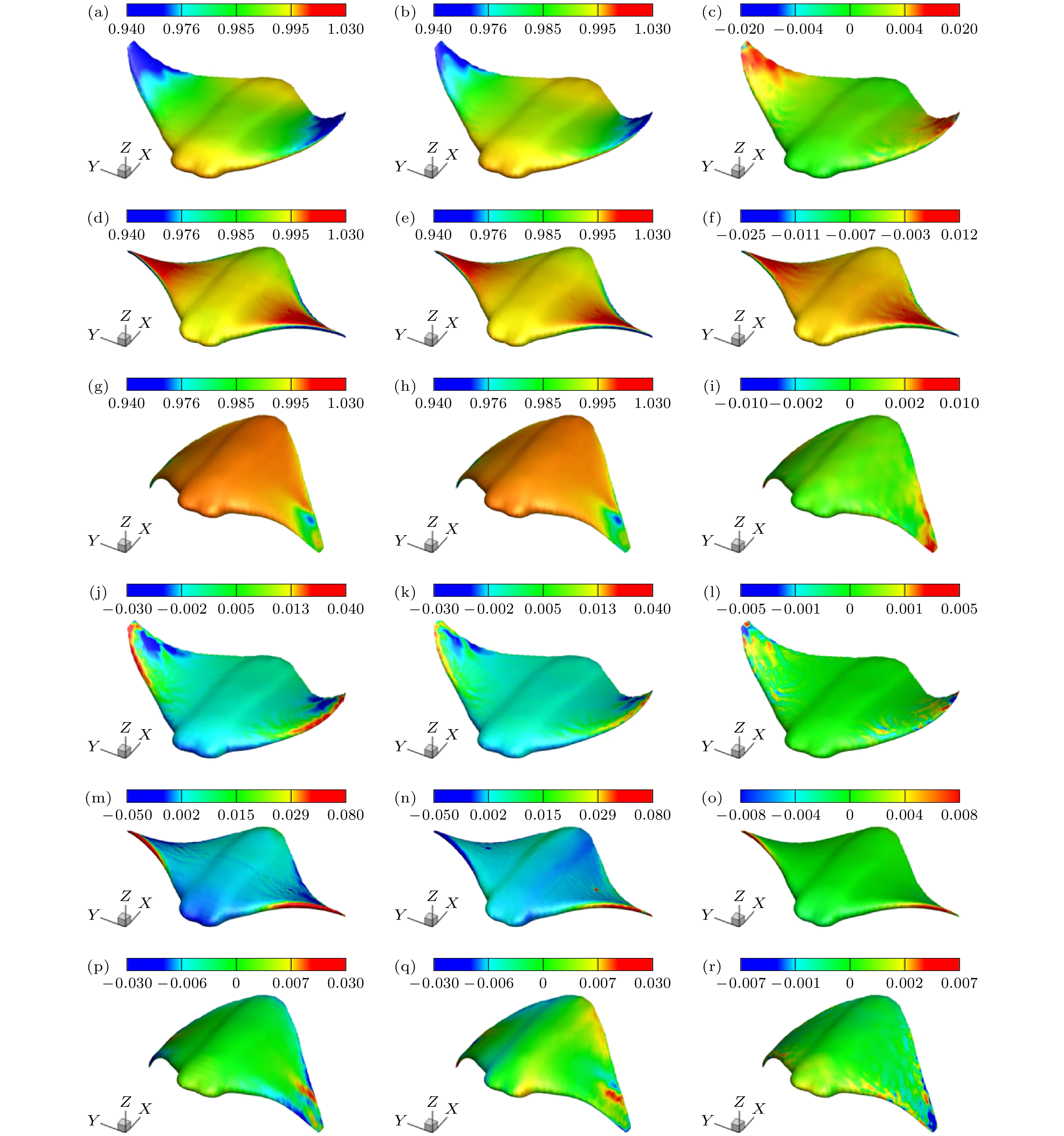
图 11 外推测试工况压力场与速度场预测结果与误差 (a), (d), (g)压力场CFD计算真值; (b), (e), (h) surf-DDPM人工智能模型预测结果; (c), (f), (i)预测值误差云图; (j), (m), (p)速度场CFD计算真值; (k), (n), (q) surf-DDPM人工智能模型预测结果; (l), (o), (r)预测值误差云图
Figure 11. Prediction results and errors of pressure and velocity fields in extrapolation test cases: (a), (d), (g) True values ofdynamic pressure field from CFD simulations; (b), (e), (h) pressure field predicted by surf-DDPM AI model; (c), (f), (i) absoluteer-ror contour of pressure field; (j), (m), (p) true values of velocity flow field from CFD simulations; (k), (n), (q) velocity fieldpre-dicted by surf-DDPM AI model; (l), (o), (r) absolute error contour of velocity field.
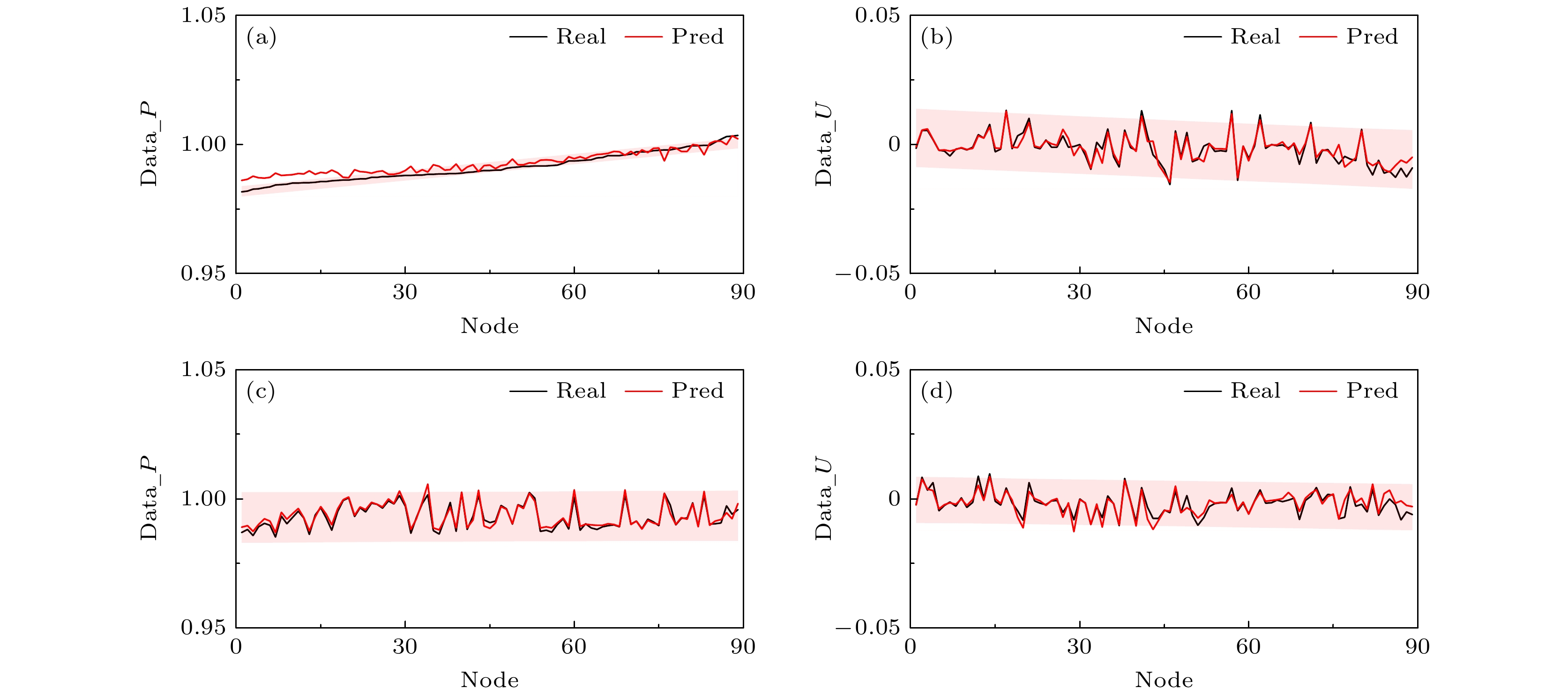
图 12 翼尖位置网格节点流场预测结果95%置信区间 (a) d1姿态压力场; (b) d1姿态速度场; (c) d3姿态压力场; (d) d3姿态速度场
Figure 12. 95% Prediction intervals for flow field predictions at wingtip locations: (a) Dynamic pressure field for d1 configuration; (b) velocity field for d1 configuration; (c) dynamic pressure field for d3 configuration; (d) velocity field for d3 configuration.
表 1 不同扑动频率对应数据提取起始与间隔时间步
Table 1. Starting times and interval steps for data extraction at different flapping frequencies.
扑动频率/Hz 起始时间步 间隔时间步 0.3 11390 57 0.5 6838 35 0.6 5698 29 0.7 4884 25 0.9 3799 19  下载: 导出CSV
下载: 导出CSV
表 2 流场预测结果准确性定量分析
Table 2. Quantitative analysis of accuracy in flow field predictions.
预测结果 内插测试工况 外推测试工况 RMSE PSNR/dB SSIM RMSE PSNR/dB SSIM d1-P 0.0224 37.031 0.9679 0.0263 36.085 0.9598 d2-P 0.0122 38.203 0.9754 0.0233 36.556 0.9624 d3-P 0.0214 37.486 0.9688 0.0208 36.387 0.9533 d1-U 0.0245 36.475 0.9613 0.0272 35.902 0.9587 d2-U 0.0146 38.811 0.9813 0.0261 35.241 0.9496 d3-U 0.0250 35.931 0.9524 0.0301 35.158 0.9571
下载: 导出CSV
表 3 CFD与人工智能方法预测流场效率对比
Table 3. Comparison of flow field prediction efficiency between CFD and surf-DDPM methods.
扑动频率/Hz CFD/核时 AI训练/卡时 AI预测/s 0.3 120 24 30 0.5 72 0.6 60 0.7 48 0.9 36
下载: 导出CSV
-
[1] 王亮 2007 博士学位论文 (南京: 河海大学) Wang L 2007 Ph. D. Dissertation (Nanjing: Hehai University [2] Asada T, Furuhashi H 2024 Ocean Eng. 308 118261 doi: 10.1016/j.oceaneng.2024.118261 [3] Xing C, Yin Z, Xu H, Cao Y, Qu Y, Huang Q 2024 Ocean Eng. 312 119039 doi: 10.1016/j.oceaneng.2024.119039 [4] Bao T, Cao Y, Cao Y H, Lu Y, Pan G, Huang Q G 2024 Ocean Eng. 309 118377 doi: 10.1016/j.oceaneng.2024.118377 [5] Dong H, Bozkurttas M, Mittal R, Madden P, Laude G V 2010 J. Fluid Mech. 645 34 doi: 10.1017/S0022112009992941 [6] Huang Z, Menzer A, Guo J, Dong H 2024 Bioinspir Biomim 19 026004 doi: 10.1088/1748-3190/ad1b2e [7] Wang S, Gao P, Huang Q G, Pan G, Tian X 2024 Ocean Eng. 294 116799 doi: 10.1016/j.oceaneng.2024.116799 [8] Gao P C, Song B, Huang Q G, Tian X S, Pan G, Chu Y, Bai J Y 2024 Ocean Eng. 313 119415 doi: 10.1016/j.oceaneng.2024.119415 [9] Gao P C, Huang Q G, Pan G, Cao Y, Luo Y 2023 Ocean Eng. 278 114389 doi: 10.1016/j.oceaneng.2023.114389 [10] Miyanawala T P, Li Y, Law Y Z 2024 Ocean Eng. 306 118003 doi: 10.1016/j.oceaneng.2024.118003 [11] Li G, Zhu H, Jian H 2023 J. Hydrol. 625 130025 doi: 10.1016/j.jhydrol.2023.130025 [12] 战庆亮, 葛耀君, 白春锦 2022 物理学报 71 074701 doi: 10.7498/aps.71.20211373 Zhan Q L, Ge Y J, Bai C J 2022 Acta Phys. Sin. 71 074701 doi: 10.7498/aps.71.20211373 [13] Wang Z, Zhang W 2023 Phys. Fluids 35 025124 doi: 10.1063/5.0136420 [14] Qiu C C, Huang Q G, Pan G 2023 Phys. Fluids 35 017132 doi: 10.1063/5.0135365 [15] Xia Y, Li T, Wang Q, Yue J, Peng B, Yi X 2024 Phys. Fluids 36 103313 doi: 10.1063/5.0229049 [16] Li R, Song B, Chen Y 2024 Ocean Eng. 304 117857 doi: 10.1016/j.oceaneng.2024.117857 [17] Caraccio P, Marseglia G, Lauria A 2024 Phys. Fluids 36 107120 doi: 10.1063/5.0223617 [18] Qiu C C, Huang Q G, Pan G 2023 Ocean Eng. 281 114555 doi: 10.1016/j.oceaneng.2023.114555 [19] Gao H, Gao L, Shi Z, Sun D, Sun X 2024 Aerosp. Sci. Technol. 147 108977 doi: 10.1016/j.ast.2024.108977 [20] Lin H, Jiang X, Deng X 2024 Thinking Skills and Creativity 54 101649 doi: 10.1016/j.tsc.2024.101649 [21] Kartashov N, Vlassis N N 2024 arXiv: 2409.14473 [cs.CE] [22] Torem N, Ronen R, Schechner Y Y, Elad M 2023 Proceedings of the IEEE/CVF International Conference on Computer Vision Paris, France, October 2–6, 2023 p3810 [23] Ho J, Jain A, Abbeel P 2020 Adv. Neural Inf. Process. Syst. 33 6840 doi: 10.48550/arXiv.2006.11239 [24] Rombach R, Blattmann A, Loren D, Esser P, Ommer B 2022 Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition New Orleans, LA, June 18–24, 2022 p10674 [25] Song J, Meng C, Ermon S 2020 arXiv: 2010.02502 [cs.LG] [26] Nichol A, Dhariwal P, Ramesh A, Shyam P, Mishkin P, McGrew B 2021 arXiv: 2112.10741 [cs.CV] [27] Huang L, Zheng C, Chen Y 2024 Phys. Fluids 36 095113 doi: 10.1063/5.0225657 [28] Rybchuk A, Hassanaly M, Hamilton N 2023 Phys. Fluids 35 126604 doi: 10.1063/5.0172559 [29] Gao P C, Tian X, Huang Q G 2024 Phys. Fluids 36 011902 doi: 10.1063/5.0180621 [30] Gao P C, Huang Q G, Pan G 2023 Phys. Fluids 35 061909 doi: 10.1063/5.0154914 [31] 张栋 2020 博士学位论文 (西安: 西北工业大学) Zhang D 2020 Ph. D. Dissertation (Xi’an: Northwestern Polytechnical University -
计量
- 文章访问数: 473
- HTML全文浏览数: 473
- PDF下载数: 5
- 施引文献: 0