
 首页
首页 登录
登录 注册
注册



 下载:
下载:
-
在高精度磁场梯度探测技术领域中, 原子自旋极化状态的精确测量是研究的核心目标之一, 自旋成像技术作为关键手段为科学研究和医学技术的进步奠定了坚实的基础[1–5]. 传统的磁共振成像(MRI)技术, 作为实现原子自旋成像的经典方法已被广泛应用[6–9], 然而该技术对高度稳定且均匀的强磁场的需求, 限制了其在实际应用中的普及与改进, 因此光学磁共振成像(OMRI)技术应运而生, 解决了磁场的稳定与强磁场需求问题. 自20世纪90年代以来, OMRI利用原子气室内部的空间编码方法, 实现自旋极化状态的测量[10–12]. 然而传统OMRI方法依赖于复杂的掩模版设计, 以实现光对自旋空间分布的精细操控, 这一技术不仅面临巨大的挑战, 还显著制约了空间分辨率的进一步提升, 尤其是在追求毫米级甚至更精细分辨率的应用场景中[13,14]. 为了克服这一技术瓶颈, 科研人员开始探索基于光电探测器阵列的新型测量方法, 该方法通过对气室内部进行精细的空间分割, 直接捕捉自旋分布的细微变化[15–18]. 尽管这种方法显著提升了测量的灵活性和空间感知能力, 但其空间分辨率仍受到探测器阵列布局中相邻通道间距的物理限制, 成为限制其进一步发展的关键因素[19–25]. 为了突破这一限制, 2017年, Tau等[26]创造性地引入数字微镜装置(DMD), 实现了亚毫米(260 μm)交流磁场进行成像. 随后Dong等[27]于2019年利用DMD对原子气室自旋空间分辨率进行验证, 成功测得线宽为13.7 μm的原子自旋图像, 这一成果在空间分辨率上取得了显著突破, 然而该团队对于系统的时间频率响应特性并未进行深入研究与探讨.
近年来, 基于DMD[28]和激光调制技术的进步, 磁场梯度检测领域对高分辨率测量能力以及快速动态响应能力的需求持续攀升, 尤其是在磁性纳米颗粒的流动和气室内原子扩散分布等动态过程的实时监测中. 传统基于气室内空间分割方法的静态二维成像方法逐渐暴露出其局限性[18]. 具体而言, 静态成像方法难以捕捉原子自旋状态随时间演化的动态过程, 这严重制约了对高速变化物理现象的深入观测. 特别是在面对高频变化场景时, 静态成像不仅捕获图像的速度较慢, 而且在处理瞬态事件时的响应时效性亦显不足. 鉴于此, 本文研究了基于DMD的碱金属原子气室动态自旋成像方法, 旨在通过精确控制碱金属原子气室内部原子状态的快速变化, 实现了对原子极化状态的动态调控与观测. 该技术基于Bell-Bloom原理[29], 通过调节泵浦激光频率使其与原子在磁场中的拉莫尔进动频率同步(
$\omega = \gamma B$ )或异步($\omega \ne \gamma B$ ), 从而实现对原子自旋极化状态的高灵敏探测与操控. 实验所使用的DMD由数百万个微小的可倾斜镜片组成, 每个镜片都可以独立偏转至“开”或“关”状态, 从而实现对光线的反射或阻挡. 当连续加载多样化的二进制图片阵列时, 这些图片中的每个像素点都对应着DMD上的一个镜片, 通过快速切换镜片的偏转状态, DMD能够在极短的时间内形成复杂的图像, 从而将泵浦光分割成多个独立的光束, 每个光束的强度和方向都受到精确控制. 这些光束随后被投射到气室内的不同区域, 通过精确的时间和空间调制, 实现对气室内原子自旋极化程度的精细操控, 进而有效区分气室内不同区域的原子自旋极化状态. 通过相机捕捉原子自旋极化状态不同所导致的光强变化, 并分析了不同帧率下捕获的自旋图像像素值的变化规律, 最终实现了空间分辨率为95.9 μm、时间响应频率为355帧的气室内部原子极化状态的动态成像. 这一突破, 不仅显著提升了成像的时空分辨率, 还为研究快速物理过程提供了强有力的工具与方法论支持. -
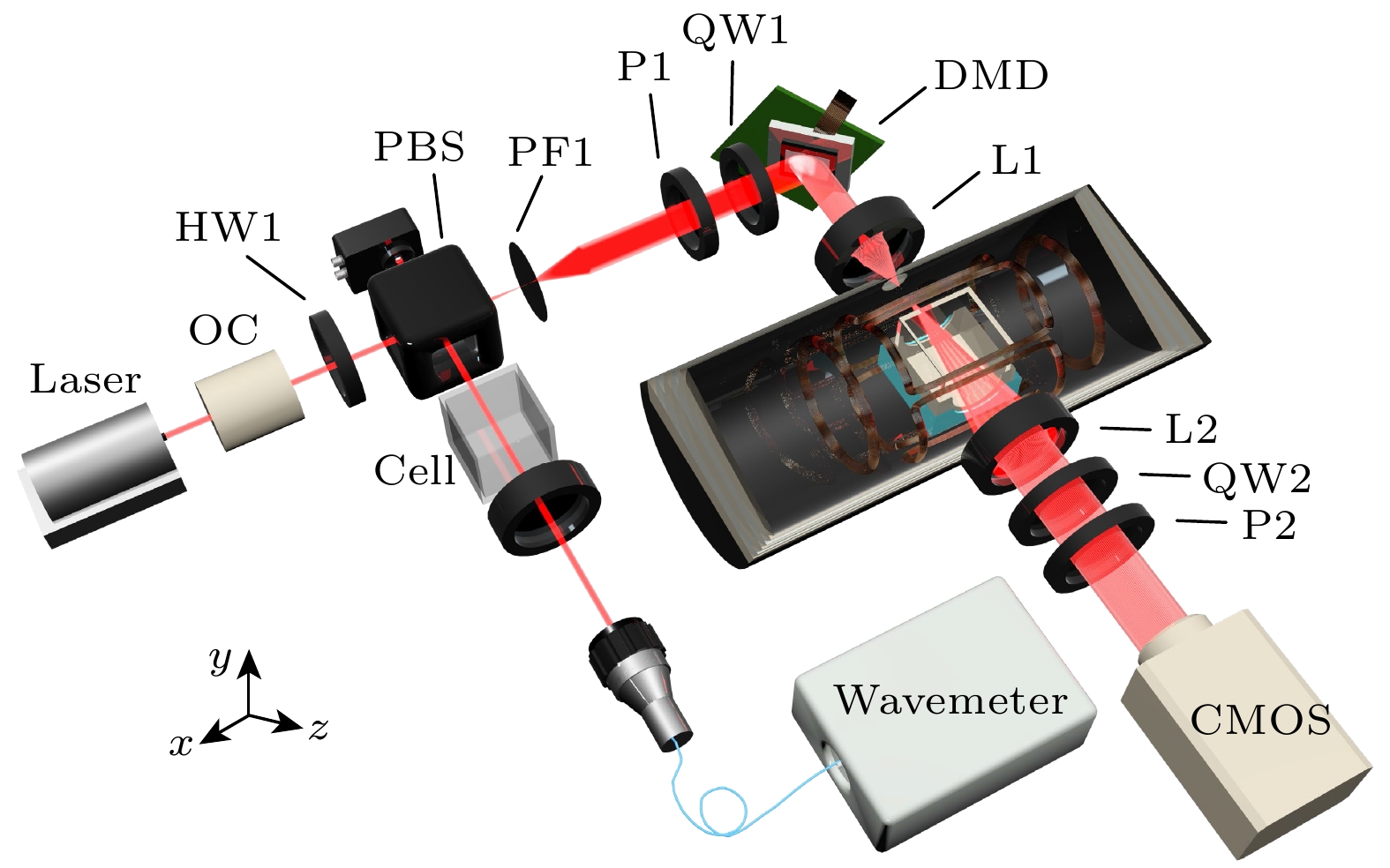
实验装置如图1所示, 利用可调式猫眼二极管激光器(tunable cateye lasers Moglabs895)产生波长为894.6 nm, 功率为32 mW的激光, 激光通过法拉第隔离器(OC)后, 有效抑制了反向传输的激光, 确保了激光器工作状态的稳定. 1/2波片(HW1)和偏振分光棱镜(PBS)对激光进行分束. 其中一束光进入稳频系统, 另一束光通过空间光滤波器(PF1)对激光进行去噪, 由Glan-Taylor偏振片(P1)和1/4波片(QW1)进行圆偏振. 实验设计透镜L1和L2进行成像, 光束经过DMD调制后的反射光, 通过透镜L1聚焦并等大地成像于原子气室中, 确保了激光空间分布. 随后光线穿越原子气室后, 再由透镜L2进一步调整, 使激光频率等于拉莫尔共振频率, 这样就可以把激光空间分布转换为自旋极化的空间分布, 自旋极化空间分布直接利用相机(CMOS)对经过原子气室的激光进行探测.
DMD(Vialux V-4390)中每个微镜的尺寸为13.7 μm×13.7 μm, 使用DMD对光进行时空调制. 为了在气室中没有偏振的情况下完全隔离空间光场的光强, 增强自旋图像的对比度, 在原子气室之后设置另一个1/4波片(QW2)和Glan-Taylor偏振片(P2)实现了正交隔离. 在实验设计中, 采用两组1/4波片和Glan-Taylor偏振片实现椭圆偏振泵浦和正交隔离, QW1和P1放置于原子气室之前, 其中波片快轴相对于偏振片的光轴之间的角度为
${{\text{π}}}/{{4}}$ , 用于将入射原子气室的光调整为椭圆偏振光, QW2和P2用于实现正交隔离, 确保非共振区的激光干扰被有效抑制. 设置QW2的光轴与QW1的光轴对齐, 并且P2与P1之间的相对角度为${\text{π}}$ . 通过精确调节这两组光学元件, 实现了高效的正交隔离.最后衰减片用于控制进入相机(SH3-103)的光强, 从而避免过度曝光. 原子气室由石英玻璃制成, 充满600 Torr的4He缓冲气体和150 Torr (1 Torr = 1.33322×102 Pa)的N2淬灭气体, 然后放置在由氮化硼制成的烤箱中, 使用双层加热膜将气室加热到90 ℃. 调整激光器二极管的温度和电流, 使激光频率保持在D1线附近, 使用5层圆柱形磁屏蔽筒, 屏蔽筒内的一组线圈补偿沿x轴和y轴的残余磁场, 并沿y轴产生1420 nT的均匀磁场
实验原理图如图2(a)所示. 为了实现时空上的精确调制, DMD被加载了特定序列组的二进制黑白图案, 这些图案以“U”形图案为例, 用于产生具有周期性分布的“U”形条纹激光, 其泵浦频率分别为
${\omega _1}$ 和${\omega _2}$ , 如图2(b)所示. 图中, 不同长度的长方体区域直观地代表了不同持续时间的激光泵浦周期. 具体而言, 红色区域处泵浦激光频率为${\omega _1}$ , 灰色区域处泵浦激光频率为${\omega _2}$ , 而白色区域处则表示激光光源的暂时关闭状态. 随着DMD上载图片中条纹大小的不同, 相应的红色区域大小也会随之变化. 考虑到原子气室内施加的磁场B是均匀分布的, 而泵浦激光在空间上则是通过DMD实现了精确调制, 因此, 实验中将主磁场方向(沿y轴)与泵浦光方向(沿z轴)设置为相互垂直. 当泵浦激光频率${\omega _1}$ 与原子在磁场中的拉莫尔进动频率$\gamma B$ 相匹配(即${\omega _1} = \gamma B$ )时, 原子气室内的原子将发生共振现象, 透光率显著增大. 相反, 当泵浦频率${\omega _2}$ 与拉莫尔进动频率不匹配(即${\omega _2} \ne \gamma B$ )时, 原子则不会发生共振, 透光率会随之下降. 在x-y平面截面上的每个正方形对应DMD表面上的一个最小可以分辨通道, 该通道由单个或多个反射镜组成. 为了达到动态成像的效果, 在本实验上载至DMD的图片中字符“U”是连续增大的, 与之对应的反射镜的数量也在连续增加, 故产生了条纹宽度连续增大的U形条纹, 如图2(c)所示. -
碱金属原子自旋极化的相互作用主要通过光泵浦过程实现, 当碱金属原子被泵浦光极化后, 其自旋极化状态会在外加磁场的作用下发生拉莫尔进动. 拉莫尔进动的频率
${\omega _{\text{L}}} $ 与外加磁场强度$B$ 成正比, 其关系由以下方程描述:其中
$\gamma $ 为旋磁比, B是标量磁场. 因此通过拉莫尔进动频率可以获得磁场的大小, 当泵浦光频率$\omega $ 与拉莫尔进动频率${\omega _{\text{L}}}$ 相匹配时, 原子自旋极化达到最大值; 当泵浦光频率$\omega $ 与拉莫尔进动频率${\omega _{\text{L}}}$ 不匹配时, 原子自旋极化程度降低.接下来对碱金属原子的自旋极化矢量在磁场中的演化过程进行详细的推导与说明, Bell-Bloom磁强计在空间坐标系中的测量原理图如图3所示.
假设磁场方向为
${z_0}$ , 在空间坐标系$xyz$ 中, 极角与方位角分别为$ \theta $ 和$\varphi $ , 通过旋转坐标系使${z_0}$ 轴与磁场方向对齐, 得到${x_0}{y_0}{z_0}$ 坐标系, 则磁场方向$ {z_0} $ 在$xyz$ 坐标系中的分量可以表示为其中
$\theta $ 是磁场方向与$z$ 轴的夹角,$\varphi $ 是磁场方向在$xy$ 平面上的投影与$x$ 轴的夹角.在这种情况下, 磁场B表示为
在
$xyz$ 轴平面内, 与外加磁场和自身弛豫过程、以及光泵浦相关的原子自旋极化的演化过程可以由Bloch方程表示[29]:其中,
$ {\boldsymbol{S}} $ 表示碱金属原子的自旋极化矢量,$q$ 为衰减因子,${\boldsymbol{s}}$ 表示光矢量的方向,${R_{{\text{op}}}}$ 为泵浦速率,${R_{{\text{rel}}}}$ 为弛豫速率,${{{T}}_{{\text{rel}}}}$ 为相对应的弛豫时间. (4)式在${x_0}{y_0}{z_0}$ 坐标系下可转化为式中, 第1项表示自旋极化矢量在磁场中的进动, 第2项表示泵浦光对自旋极化的影响, 第3项表示自旋极化的弛豫过程. 为了进一步简化自旋极化矢量
${\boldsymbol{S}}$ , 消除自旋极化矢量在磁场中的进动, 引入${x_1}{y_1}{z_0}$ 旋转坐标系,${z_0}$ 轴仍与磁场方向一致,$ {x}_{1} $ 与${y}_{1} $ 会随着时间旋转, 旋转角速度等于自旋极化矢量${\boldsymbol{S}}$ 在磁场中的进动频率${\omega _0} = \gamma B$ , 旋转角度$\alpha $ 随时间$t$ 的变化定义为可以得到
${x_1}{y_1}{z_0}$ 与${x_0}{y_0}{z_0}$ 坐标系之间的变换关系为则(5)式在
${x_1}{y_1}{z_0}$ 坐标系下的表达式为在旋转坐标系
${x_1}{y_1}{z_0}$ 下, (9)式可分解成3个分量分别为其中
$ {T_2} $ 和$ {T_1} $ 分别为横向弛豫时间和纵向弛豫时间. 在泵浦阶段泵浦光被打开, 原子被极化, 泵浦激光强度为式中,
${I_{\text{m}}}$ 为最大瞬时泵浦激光大小,$\omega $ 是调制频率. 因此泵浦速率${R_{{\text{op}}}}$ 可以表示为式中,
${R_{\text{m}}}$ 为最大瞬时光泵浦速率. 因此(10)式可以表示为泵浦阶段之后, 整个系统进入探测阶段, 泵浦光被关闭, 原子自旋极化矢量在磁场中自由演化, 此时
${R_{{\text{op}}}} = 0$ , 代入(13)式求得原子自旋极化的稳态解为上述所求得的原子自旋极化大小是在
${x_1}{y_1}{z_0}$ 坐标系中, 所以还需将原子自旋极化矢量${\boldsymbol{S}}$ 转换回${x_0}{y_0}{z_0}$ 坐标系中, 坐标转换关系在(7)式中已经给出. 在${x_1}{y_1}{z_0}$ 坐标系中, 自旋极化矢量${\boldsymbol{S}}$ 可以表示为将(15)式转换回
${x_0}{y_0}{z_0}$ 坐标系中可以得到:经过上述推导在
${x_0}{y_0}{z_0}$ 坐标系下原子自旋极化分量表达式为使用同样的推导方法可以将原子自旋极化分量转回到
$xyz$ 坐标轴上, 表达式为在本实验中, 将主磁场方向与泵浦激光方向设置为相互垂直, 则
$\theta = {90^ \circ }$ , 将其代入(18)—(20)式, 可以将公式简化为根据以上理论推导, 最终得到自旋极化矢量
${\boldsymbol{S}}$ 在实验室坐标系$xyz$ 中的分量随时间演化的公式. (21)式表明自旋极化矢量${\boldsymbol{S}}$ 在$z$ 轴方向的分量${S_z}$ 随时间呈现特定的演化规律. 通过调节泵浦激光的频率和强度, 可以控制碱金属原子的自旋极化态, 从而实现对自旋极化矢量的时间分辨调控.得到碱金属原子自旋极化大小随时间的演化规律之后, 进一步分析光强大小与自旋极化之间的关系. 当泵浦激光的频率与拉莫尔进动频率一致时, 原子自旋极化达到最大值, 此时原子对激光的吸收减少, 透射光强增强, 在相机上表现为亮区; 反之, 当泵浦激光的频率与拉莫尔进动频率不一致时, 原子自旋极化程度降低, 透射光强减弱, 在相机上表现为暗区. 为了定量评价这种关系, 分析了光强大小与自旋极化之间的理论公式. 当泵浦激光透过共振区时, 原子会吸收能量导致激光的衰减, 圆偏振激光
$I$ 衰减过程为对(22)式进行积分, 求得
$I(z) = {{\text{e}}^{ - \beta z}}{I_{0}}$ , 其中${I_{0}}$ 为初始光强. 圆偏光在原子气室中传播时, 原子布居数被重新分配, 激光强度${I_z}$ 的变化量为[30]求解(23)式微分方程得出圆偏振光强与其在气室中传播距离
$z$ 的关系:其中
$\beta z = n\sigma (v)z$ , 是圆偏振光在气室$z$ 处的光学深度,$n$ 为原子气室中碱金属密度,$\sigma (v)$ 为有效吸收截面. 从(24)式可以看出, 当处于共振区时, 极化率达到最大, 泵浦激光的出射光强也达到最大, 通过出射光强即可求出自旋极化${S_z}$ 的大小, 而自旋极化的空间分布也可直接通过检测光强得到. 之所以能够得到自旋极化空间分布是因为空间中不同的泵浦激光频率对应不同大小的旋光角, 其是由空间中不同大小极化导致的. 因此自旋极化分布反映在光强分布, 通过光学成像能够得到自旋极化分布, 气室中旋光角$\phi $ 与自旋极化${S_z}$ 成正比[31]:其中n是原子密度, c是光速,
${r_{\text{e}}}$ 是电子半径,$l$ 是光传播距离,${f_{{\text{D}}1}}$ 是振荡强度,${\text{D1}}\left( {\delta v} \right)$ 是${\text{D1}}$ 线周围的吸收系数. 除了自旋极化${S_z}$ 外, 其他都是已知条件, 而${S_z}$ 可以通过(24)式求出, 故可得出旋光角的大小.由于泵浦光沿着
$z$ 轴传播, 相机所拍摄的图像对应于xoy平面, 故二维平面的坐标可以使用$(x, y)$ 表示, 因此(25)式可以改为式中, 光强
$I(x, y)$ 和自旋极化${S_z}(x, y)$ 分别为空间中不同位置处的旋光角与自旋极化大小. 最终相机接收到的空间分布光强为当得到进入相机的光强分布之后, 需分析光强分布与像素值之间的关系. 相机拍摄图像时, 场景中的物体辐射的亮度
$L$ , 经过相机的透镜后, 在图像传感器的表面上是辐照度$E$ , 而场景亮度$L$ 映射到$E$ 的关系式[32]为其中, h是相机镜头的焦距,
$ \eta $ 是入射光与图像传感器垂直面的夹角, d是镜头光圈大小. 在拍摄图像时相机保持静止, 成像过程中$h, \eta , d$ 都是不变的量, 所以$L$ 映射到$E$ 的过程是一个线性映射过程.在曝光时间
$T$ 内到达图像传感器上的总的曝光量, 经过传感器的光电转换后, 得到模拟信号, 然后再经历模数转换、量化取整等步骤后, 得到像素值$K$ , 相机响应函数为其中
$K$ 为像素值,$E$ 为辐照度. 通过对相机响应函数的拟合标定, 可将非共振区与共振之间的光强对比度转化为像素值大小的差值. -
在进行成像实验之前需要对相机的光电转换特性进行标定[32], 这一过程通过实验保持同一稳定光源的条件下, 被测物静止不动, 设置不同的曝光时间进行图像采集, 并测量相机输出的图像像素值大小, 最终通过二次多项式拟合确定了相机的响应函数曲线, 如图4所示. 该响应函数描述了相机输出像素值中, 由五行乘五列构成的一个区域内像素值的百分比与曝光度(以自然对数形式表示, 即
$\ln (Et)$ )之间的关系, 其中$E$ 代表辐照通量,$t$ 代表曝光时间. 完成标定后可利用得到的响应函数对相机捕获的图像进行校正, 确保图像数据的准确性和可靠性.图4曲线中黑色点从右到左依次为相机在30, 60, 90, 120, 150, 355 fps (帧)所测得的实验数据, 数据点与相机响应函数曲线基本一致, 产生差异的地方可能是由于外界光线无法完全遮挡引起.
DMD的每个微镜可以独立地在+12°和–12°之间切换. 本实验中微镜偏转角度为+12°时, 对应于“开”状态, 会将激光束反射至气室; 而当DMD微镜偏转角度为–12°时, 处于“关”状态时, 其会将激光束反射至气室区域. 通过将多个互补的图像序列加载到DMD阵列中, 分别控制不同微镜单元的开关状态, 从而调节激光的通过与阻断, 如图5(a)—(c)所示的图像.
通过加载不同图片序列, 使得出射激光在时间和空间上产生了不同的强度分布. 在y轴方向施加磁场, 将电流源的电流大小设置约为14.3 mA, 对应电流与磁场之间的转换系数为99.45 nT/mA, 如此y方向的磁场大小为1420 nT, 泵浦激光频率将会与原子在该磁场所对应的拉莫尔进动频率相一致, 使原子发生共振, 共振条件使得原子的自旋状态发生显著变化. 由于DMD加载图片序列中字符粗细的不断变化, 使得DMD对激光的时空调制也在不断改变, 从而导致气室内原子极化态的空间分布不断变化. 这些因原子极化状态不同而引发的光强变化被相机捕捉, 当气室内原子发生共振现象时, 自旋图中相应位置呈现亮区; 未发生共振现象时, 自旋图中相应位置呈现暗区, 光强分布进一步转化为可视化信息, 从而生成了气室内原子自旋图像, 该图像以光强分布的形式直观展现了原子自旋状态在气室内的分布情况.
为了保证实验结果是对原子自旋极化的成像, 本实验采用了光隔离技术来探测自旋极化的二维图像. 在空间区域中, 当泵浦激光频率与原子自旋拉莫尔进动不发生共振时, 二维图像反映的是空间调制激光光场的直接成像. 然而, 由于正交隔离技术的作用, 此时光的偏振状态与线偏振片的光轴垂直, 激光无法被检测到. 相反, 当泵浦激光频率与原子自旋拉莫尔进动发生共振时, 二维图像则反映了原子自旋极化的分布. 此时, 由于旋光效应, 线偏振光的偏振方向发生偏转, 不再与偏振片的光轴成90°, 因此激光能够被检测到. 通过这种方式, 实现了对空间调制激光光场成像的有效隔离, 确保实验结果仅反映原子自旋极化的信息.
进一步验证得到的图像完全反映原子自旋极化的信息, 本文进行了一组对比实验. 利用DMD上载图5(b)所示的图案, 并通过相机检测得到的自旋极化二维图如图6所示. 其中图6(a)为背景图, 即激光光场的直接成像, 此时未发生共振, 红框内略微的亮区部分可能是由于正交隔离未能完全阻挡非共振区激光, 导致少量的空间调制激光光场干扰所形成的背景噪声. 图6(b)为加入磁场后探测到的自旋极化二维图像, 图中亮区表示磁场中被极化原子的拉莫尔进动频率与激光频率发生共振的区域. 可以明显观察到字符内部区域未发生共振, 表现为暗区, 字符外区域发生共振, 表现为亮区. 然而, 图6(b)中仍包含了少量激光干扰形成的背景噪声图像. 图6(b)的红框区域内与图6(a)相比, 出现了明显的亮暗对比. 图6(c)为自旋极化二维图减去背景图之后得到的结果, 此时相机中所探测到的图像完全反映了原子自旋极化的分布. 在图6(c)的红框区域内, 原本图6(a)中微弱的光影背景噪声被去除, 突出了由于原子自旋极化状态所引起的亮暗差异, 从而更加清晰地体现了自旋极化状态的实际变化情况. 通过上述实验和分析, 我们确认所得到的二维图像完全来源于原子自旋极化的信息, 而非激光光场的直接成像, 从而验证了实验结果的可靠性和准确性.
测得静态原子自旋极化二维图之后, 通过连续且顺序地加载图5(a)—(c)所示的图像序列, 每4张图片为一组重复7次, DMD实现了一个周期性的图像展示过程, 实现了对激光束在时间以及空间上的周期性通断控制, 进而可以对极化原子进行动态调节, 每幅图片字符区域所对应的激光幅度调制频率是字符外区域的2倍, 最终得到的动态原子自旋极化成像图如图7所示. 图7(a)的条纹宽度为95.9 μm, 对应着7列微镜的宽度. 获得动态原子自旋极化图后, 仍需考虑原子气室内部原子的扩散行为, 原子在气室中的扩散行为会显著影响自旋极化态的空间分布, 从而对成像分辨率产生限制. 无扩散干扰距离作为一个关键参数, 表征了在理想情况下原子不受扩散影响的空间尺度, 其为评估原子扩散对自旋极化分布的影响程度提供了基准. 每一帧的原子扩散距离则反映了在实际成像过程中, 原子因扩散而在相邻帧之间产生的位置变化, 通过计算扩散系数和无扩散干扰距离, 能够定量评估原子扩散对成像结果的影响. 无扩散干扰距离是原子气室中自旋成像的重要参数, 并且该参数也被视为空间分辨率的限制. 文献[12]定义了原子扩散对空间分辨率产生的影响, 并且文献[27]给出了无扩散干扰距离
$l = \sqrt {D{T_2}} $ . 本实验所使用的原子气室由石英玻璃制成并加热控制在90 ℃, 气室内碱金属原子的密度约为212 cm–3, 气室内充入600 Torr的4He 缓冲气体和150 Torr的 N2 淬灭气体. 在这样的气体环境下, 可以计算出扩散系数D = 0.18 cm2/s, 最终可知无扩散干扰距离为156.5 μm.得到动态原子自旋图片后, 通过调整相机的帧率, 分别在30, 150, 355 fps拍摄原子自旋极化图片, 如图8(a)—(c)所示. 图中的白色虚线作为边界线用以观察共振区与非共振区之间的亮暗差异. 可以看出随着帧率逐渐增大, 非共振区与共振区之间的亮度差异逐渐减小, 在30 fps时共振区与非共振区之间的变化较为明显, 当帧率达到150 fps时边界模糊, 当帧率为355 fps时基本无变化.
深入研究自旋图片中共振区与非共振区边界像素变化特性时, 实验在每组自旋图片的共振区与非共振区边界的相同位置划出一段直线A, 计算不同帧率下直线A上像素最大值与最小值之差并绘制成图9(a). 分析结果显示, 随着帧率的逐渐增加, 该直线A上像素值的极差呈现出递减趋势, 直到相机帧率为345 fps时, 直线上像素值极差减小至1.57. 为了进一步探索是否存在一个帧率点使得直线A上的像素值差异精确等于1, 本实验将分析焦点转向了345 fps之后的高帧率区间, 采用精细化的方法, 逐一分析了345, 355, 365, 375, 385 fps时自旋图上直线A的像素值大小, 并进行平均计算, 得出了每条直线上像素值的变化. 为了更加直观展现这些变化, 绘制了直线A上所有像素平均值随帧率变化的二维曲线, 如图9(b)所示. 图9(b)揭示了当帧率从345 fps增大到385 fps时直线上像素值的大小及变化趋势. 通过分析发现当相机帧率为355 fps时, 直线A在特定区间(如0—20)内的像素值差异稳定维持在接近1的水平, 且误差控制在5%以内.
随着相机帧率的逐步提升, 共振区与非共振区边界的像素值差异呈现逐步减小的趋势. 这一观察表明, 高帧率虽然加快了图像捕获速度, 但同时也可能导致系统对自旋图像细节分辨能力的相对减弱. 当帧率达到355 fps时, 非共振区与共振区之间的像素值差异达到最小值, 这一状态被识别为当前系统配置下, 在保证足够时间分辨率的同时, 所能维持的最高图像细节解析能力的帧率, 因此为系统的最高有效帧率. 此外, 为了更全面地理解系统性能, 本实验进行了理论上的最高帧率推导. 通过深入的理论分析与计算, 得出了理论上的最高帧率即横向弛豫时间
${T_2} = 1.36\;{\text{ms}}$ . 因为${T_2}$ 时间直接决定了信号强度随时间衰减的速率, 从而影响了成像的清晰度和帧率. 通过测量${T_2}$ 时间, 可以评估信号在特定时间内的保持能力, 并据此确定成像系统的最高帧率. 这一理论值不仅为实验结果的解读提供了重要参考, 还揭示了系统性能在理论层面的潜在上限. 在获得极化原子动态自旋成像的时间和空间分辨率之后, 结合实验测得的无扩散干扰距离, 可得到每一帧图像中的原子扩散的平均距离为0.441 μm.综上所述, 本实验达到了 95.9 μm的空间分辨率和355帧的时间分辨率. 与先前研究[27]中报道的结果相比, 其采用恒定自旋极化态空间分布测量方法, 无法实时捕捉原子自旋极化态的动态演变过程, 本文深入研究并探讨了系统的时间频率响应 特性, 通过对激光时间序列和空间序列上的精确 控制, 实现了原子自旋极化态的动态调控, 并通过对气室内部原子扩散能力和自旋图片像素值特性的分析, 得到了每一帧图像中的原子扩散距离以及系统最优时间响应频率. 综合实验与理论结果, 可以更全面地评估和优化系统的帧率配置, 以期达到最佳的性能表现.
在确立系统最高帧率及自旋图像最小可分辨条纹尺度的基础上, 本实验将蚂蚁移动的二进制图像加载至DMD, 通过空间光调制技术将图像映射到原子自旋极化的时空分布. 这一实验设计建立在前文所述的原子自旋极化成像技术基础之上, 通过正交隔离技术有效排除了激光光场直接成像的干扰, 确保了实验结果的准确性. 在此基础上, 结合高帧率成像系统, 实现了对原子自旋空间分布和时间演化的高精度可视化观测, 为研究自旋动力学提供了新的实验方法. 具体而言, 在本实验中, 将蚂蚁在一根细绳上向前移动的视频资料(见补充材料1 (
online ), 该材料展示了蚂蚁运动的原始视频以及基于动态成像结果制作的对应视频), 通过逐帧分析的方式, 转换为一系列高精度的二进制图像. 这一过程确保了每一帧图像都精确捕捉到蚂蚁运动的细微变化, 之后将视频所转换的一系列高精度二进制图像上载至DMD中, 从而对泵浦激光进行精细调控. 蚂蚁的内部区域对应于原子自旋极化程度较低的区域, 即蚂蚁轮廓内部原子不发生共振现象, 在成像图中以黑色部分呈现; 而蚂蚁的外部则对应于原子自旋极化程度较高的区域即蚂蚁轮廓外部原子发生共振现象, 在成像图中表现为相对明亮的区域. 每一帧图像代表了特定时刻原子自旋极化态的空间分布情况. 随着时间的推移, 蚂蚁的移动使得不同区域的原子自旋极化态依次呈现在图像中, 通过帧率为355 fps的成像, 能够清晰地观察到原子自旋极化态随时间动态变化的过程(见补充材料2 (online ), 该材料展示了实验过程中获得的所有结果图), 通过对自旋图片进行自动识别、对比度增强、高斯滤波等图像处理技术, 本实验成功获得了高质量的动态成像结果. 这一设计使得原子自旋态的不同层次得以清晰区分, 最终成功实现了气室内原子动态自旋过程的高帧率成像(见补充材料3 (online ), 该材料展示了通过图像处理技术获得的高质量动态成像图), 部分成像结果如图10所示. 图10直观展示了原子自旋极化态随时间的动态变化, 除此之外还将所有气室内高质量原子动态自旋图做成视频效果(见补充材料1 (online ))与蚂蚁在一根细绳上向前移动的原始视频资料进行对比, 有效验证了实验方法在捕捉由宏观物体的移动所对应的微观原子极化态变化过程方面的有效性与精确度.按照上述实验方案, 系统拍摄并分析了不同帧率下的自旋图像数据, 并通过相关理论模型计算出了无扩散干扰距离以及每一帧的原子扩散距离. 最终实验结果显示, 随着相机帧率的逐步增大, 共振区与非共振区边界的像素值之差呈现出显著的递减趋势. 当帧率达到某一临界值时, 像素值差异缩减至接近预设阈值的水平, 标志着系统已触及其分辨率能力的物理极限.
-
本实验基于DMD和激光调制技术, 提出了一种碱金属原子气室动态自旋成像方法, 通过精确控制激光束在时间和空间上的调制频率, 成功实现了对原子自旋极化态的高时空分辨调控与观测. 实验结果表明, 该方法在空间分辨率上达到了 95.9 μm, 时间分辨率达到了 355 fps, 显著优于传统的静态自旋成像方法. 与传统的静态极化成像方法相比, 本实验所采用的动态自旋成像方法能够实时捕捉自旋极化态的变化过程, 灵活地在高分辨率与快速成像之间找到最佳平衡点, 从而满足不同实验需求.
在实验中, 通过 DMD加载特定的二进制图像序列, 实现了对泵浦激光的时空调制. 通过调节泵浦激光的频率与原子在磁场中的拉莫尔进动频率相匹配, 实验中观察到了原子自旋极化的共振现象, 并利用正交隔离技术有效排除了非共振区的激光干扰, 确保了成像结果的准确性. 实验还通过对比不同帧率下的自旋图像, 分析了共振区与非共振区边界的像素值变化, 确定了系统在保证高时间分辨率的同时, 能够维持的最高有效帧率为 355 fps. 此外, 通过理论分析和实验测量, 计算了原子气室内的无扩散干扰距离为 156.5 μm, 并推导出每一帧的原子扩散距离为 0.441 μm, 为原子自旋极化的时空演化分析提供了定量依据.
实验中所采用的图像处理技术有效提高了数据分析的效率和准确性, 为实验结果的可靠性提供了有力保障. 该方法在高精度磁场探测与成像领域展现出巨大的应用潜力, 为微米尺度上磁场梯度不均匀测量、磁存储材料性能评估以及可视化磁性纳米颗粒的定位与跟踪等场景提供了全新的解决方案. 未来的研究将进一步优化系统的时空分辨率, 探索更细微的物理现象, 为量子测量仪器的性能提升提供新的实验依据和技术支持.
碱金属原子气室中自旋极化态的高时空分辨调制方法
A method of modulating spin-polarized states with high spatiotemporal resolution in alkali-metal atomic vapor cell
-
摘要: 原子自旋成像技术对气室内温度分布、旋光角检测以及镀膜抗弛豫特性测量至关重要, 其关键在于精确捕捉并解析原子自旋极化的复杂时空动态特性, 这些特性直接关系到磁强计带宽的扩展及磁梯度检测的灵敏度提升. 传统的气室内分割成像方法因静态特性限制, 无法实时捕捉原子自旋极化态的动态演变过程, 制约了量子测量仪器的性能提升. 针对这一挑战, 本研究提出了一种实时调控原子自旋极化态的碱金属原子气室动态自旋成像方法, 在空间分布上实时控制光束阵列中不同位置激光束的连续通断; 在时间序列上控制光束阵列中每束光的通断频率变化, 从而生成具有特定空间分布和频率特性的激光, 分别与气室内部不同位置的碱金属原子相互作用, 诱导原子自旋极化程度的变化. 通过对激光特性的精细调节, 当泵浦光的调制频率与原子在磁场中的拉莫尔频率相匹配时, 原子自旋极化达到最大值, 系统处于共振状态; 当调制频率与拉莫尔频率不匹配时, 原子自旋极化程度降低. 通过这种频率调制方法实现了对原子自旋极化状态地动态操控. 实验结果表明, 该方法达到95.9 μm的空间分辨率和355帧的时间分辨率, 显著优于传统静态自旋成像方法. 此方法增强了对原子自旋极化动态特性的认知, 能更精确地观测并分析磁场分布的动态特征, 从而为量子仪表性能的进一步优化提供坚实的实验依据与有力支持.Abstract: With the state-of-the-art quantum measurement devices, such as atomic clocks, atomic gyroscopes, and atomic magnetometers, as their central components, the spatiotemporal evolution of atomic spin polarization in the atomic vapor cell has a major effect on both increasing the bandwidth of magnetometer and improving the accuracy of magnetic gradient measurements. However, the major factor impeding the further improvement of the performance of quantum measurement instrument is the inherent static nature of the traditional intra-vapor cell segmentation imaging technique, which makes it challenging to achieve the real-time capture of the dynamic evolution of atomic spin states. In this work, we suggest a dynamic spin imaging method for alkali metal atomic vapor cells with real-time modification of atomic spin polarization states in order to overcome this technological difficulty. In particular, to ensure that the laser can precisely act on the alkali metal atoms in various regions in the vapor cell, we employ a complex beam array management system to modify the on/off state of the laser beams at various positions in the spatial dimension in real time. In the meantime, we generate laser fields with particular spatial distribution and frequency characteristics by using frequency modulation techniques in the time series to accurately regulate the on-off frequency of each laser beam in the beam array. These laser beams cause dynamic changes in the atomic spin polarization state by interacting with alkali metal atoms at various points in the vapor cell. Through precise adjustment of the laser properties, we can see and study the dynamic evolution of the atomic spin-polarization state in real time. According to the experimental data, the technology outperforms the traditional static spin imaging techniques by achieving an excellent temporal resolution of 355 frames per second and a spatial resolution of 95.9 micrometers. The effective use of this method enables us to monitor and evaluate the dynamic aspects of magnetic field distribution with unprecedented precision, also greatly enhance our understanding of the dynamic characteristics of atomic spin polarization.
-
Key words:
- atomic vapor cell /
- spin polarization /
- dynamic spin imaging /
- spatiotemporal modulation .
-

-
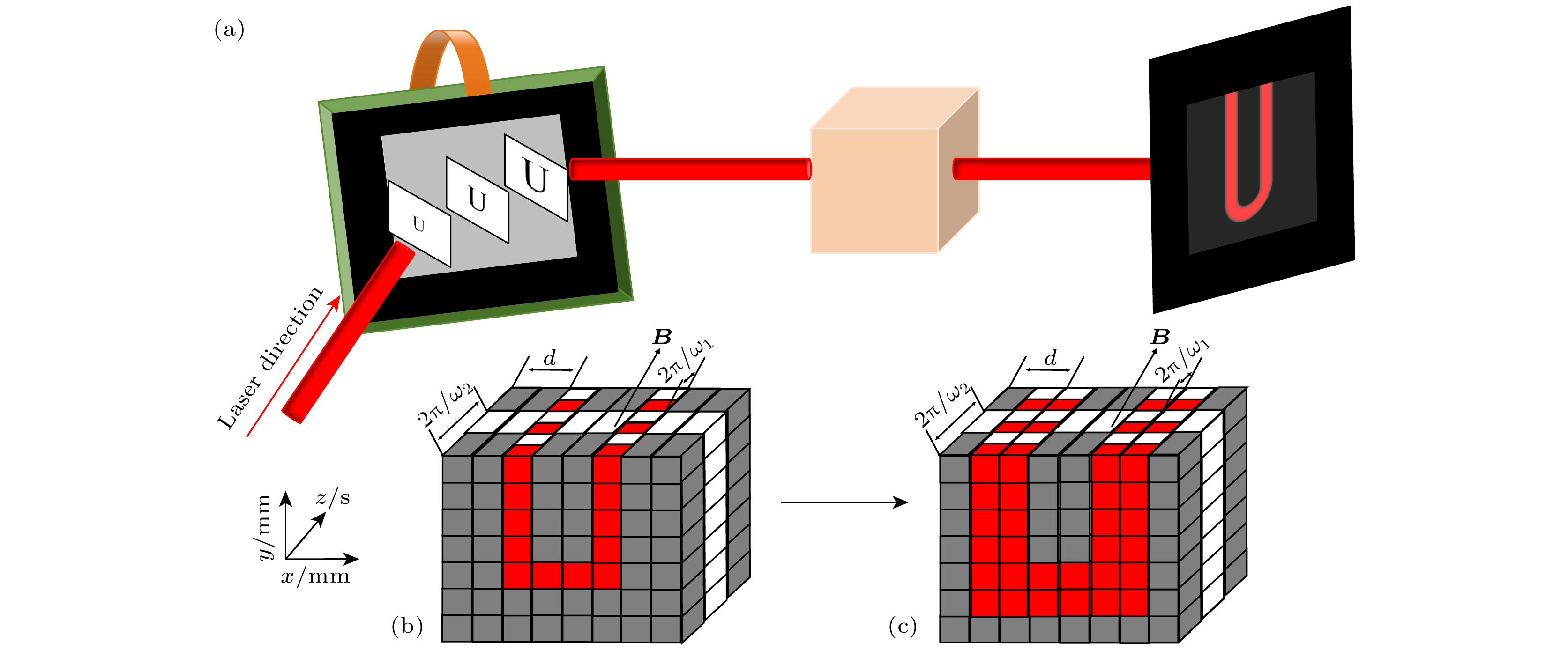
图 2 (a) DMD加载图片示意图; (b)气室内光强时空分布示意图(一列镜子); (c)气室内光强时空分布示意图(两列镜子), 其中d为空间周期, B为磁场强度,
${{2{\text{π}}}}/{{{\omega _1}}}$ 和${{2{\text{π}}}}/{{{\omega _2}}}$ 为时间周期, 本实验中B ≈ 1427 nT,${{2{\text{π}}}}/{{{\omega _1}}} = 200\;{\text{μs}}$ ,${{2{\text{π}}}}/{{{\omega _2}}} = 400\;{\text{μs}}$ Figure 2. (a) Schematic of DMD loading images; (b) schematic of spatiotemporal distribution of light intensity inside the vapor cell (one column of mirrors); (c) schematic of spatial-temporal distribution of light intensity inside the vapor cell (two columns of mirrors), d represents spatial periodicity; B represents magnetic field intensity,
${{2{\text{π}}}}/{{{\omega _1}}}$ ,${{2{\text{π}}}}/{{{\omega _2}}}$ represent time period, in this experiment B ≈ 1427 nT,${{2{\text{π}}}}/{{{\omega _1}}} = 200\;{\text{μs}}$ ,${{2{\text{π}}}}/{{{\omega _2}}} = 400\;{\text{μs}}$ .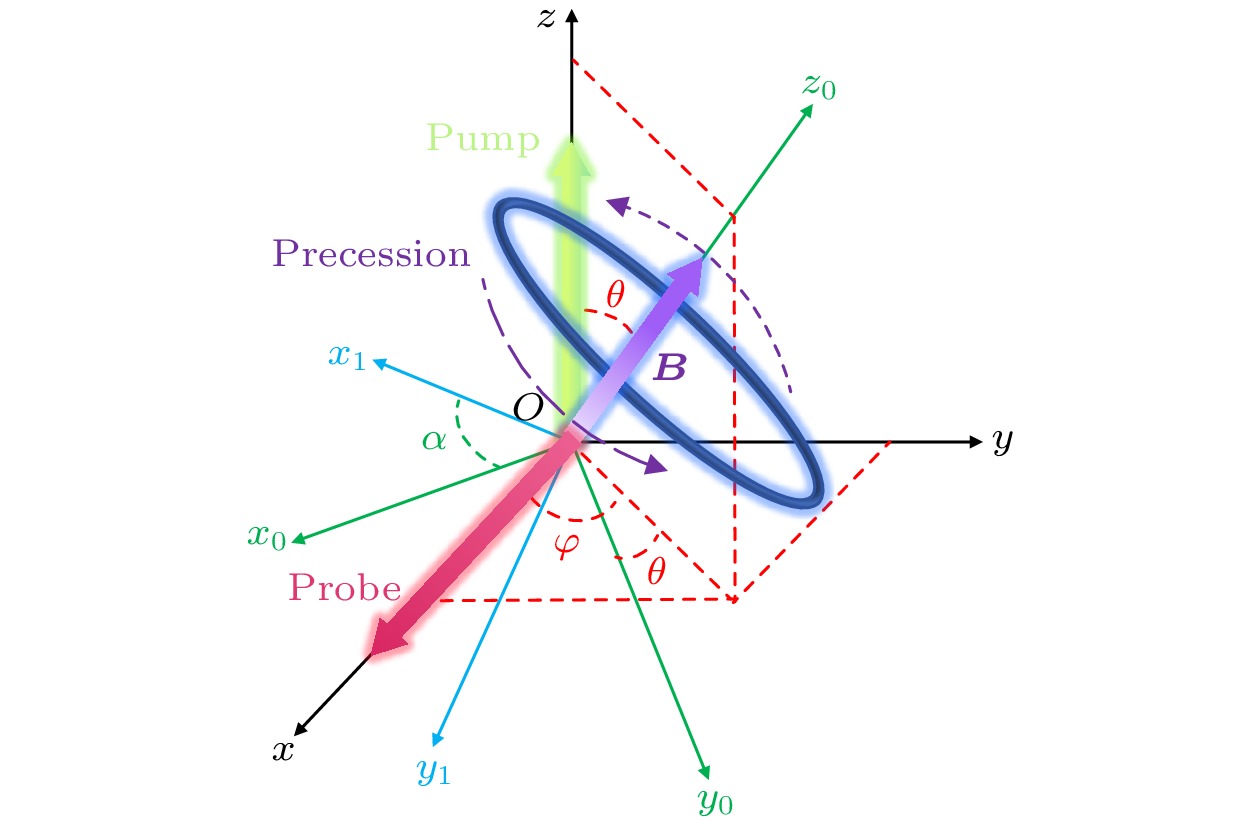
图 3 碱金属原子的自旋进动示意图
Figure 3. Schematic diagram illustrating the advance process of spin in alkali metal atoms.
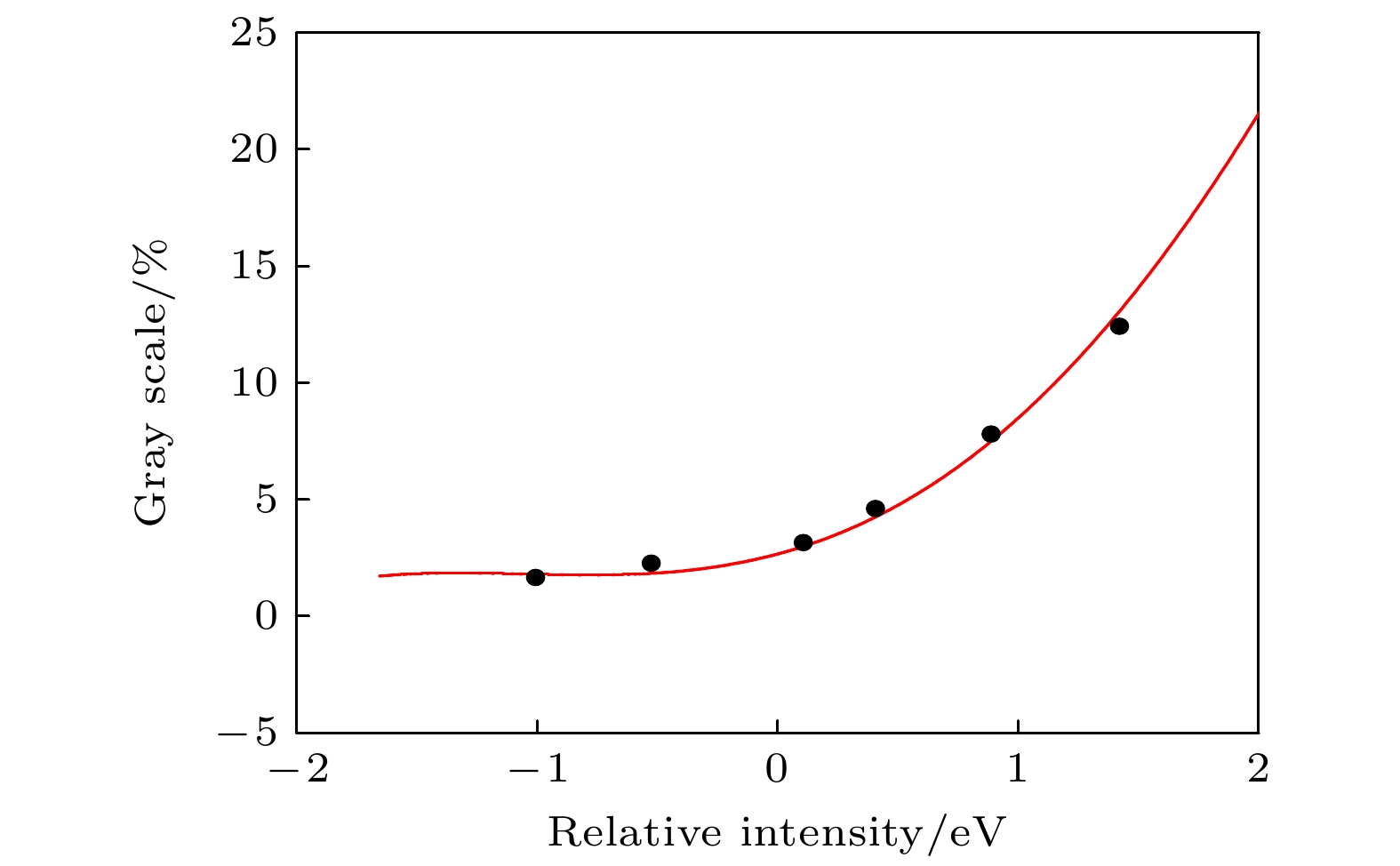
图 4 真实亮度的对数(
$\ln (Et)$ )与灰度值百分比之间的函数关系Figure 4. Logarithm of true luminance (
$\ln (Et)$ ) as a function of percent gray value.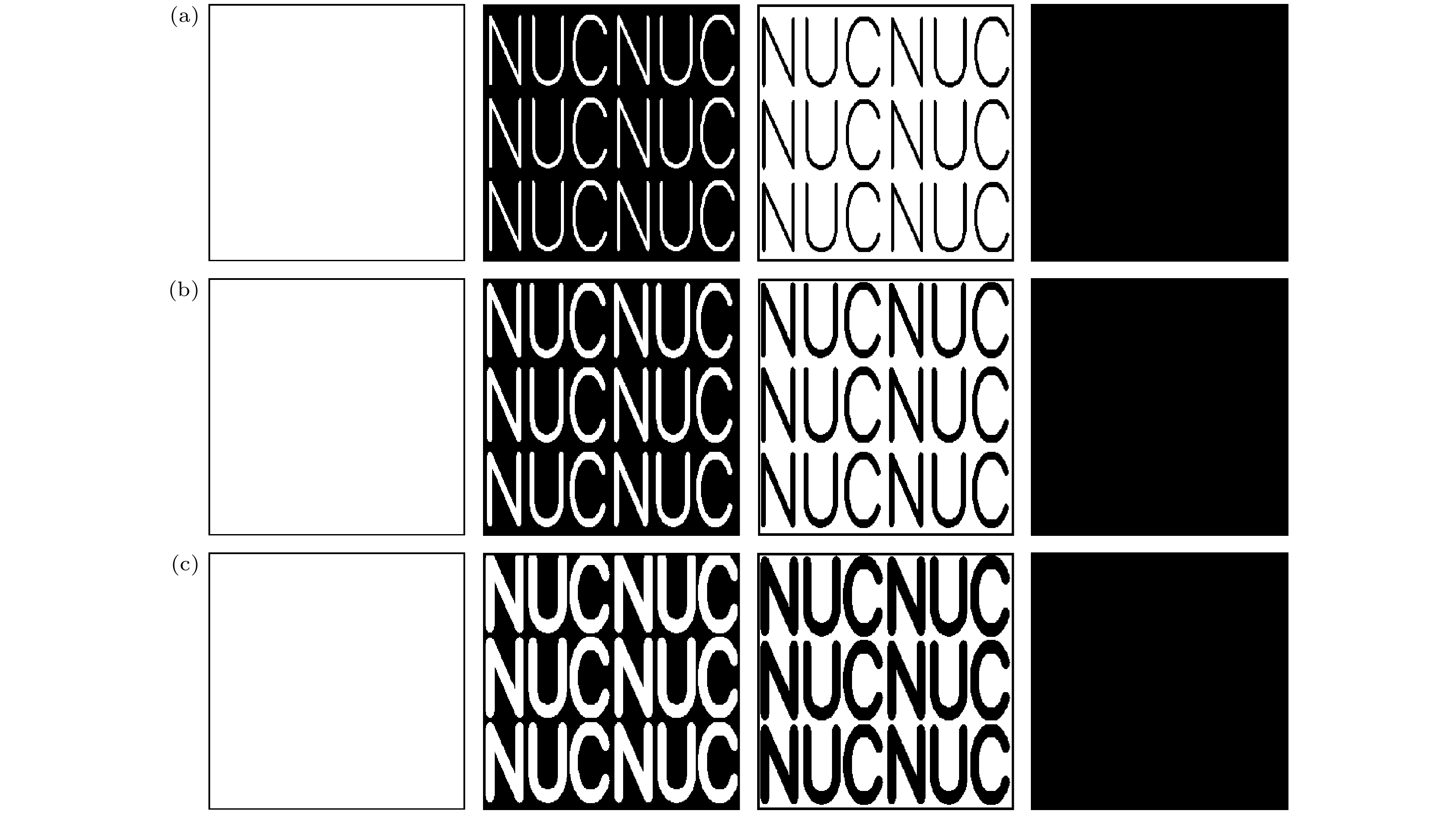
图 5 调制光场时需加载入DMD的图片 (a)字符大小对应于7列镜子宽度的二进制图片; (b)字符粗细增加, 字符大小对应于15列镜子宽度的二进制图片; (c)字符粗细再次增大, 字符大小对应于23列镜子宽度的二进制图片
Figure 5. Pictures to be loaded into the DMD when modulating the light field: (a) The character size corresponds to a binary picture of 7 column mirror widths; (b) the character thickness increases, the character size corresponds to a binary picture of 15 column mirror widths; (c) the character thickness increases again, the character size corresponds to a binary picture of 23 column mirror widths.
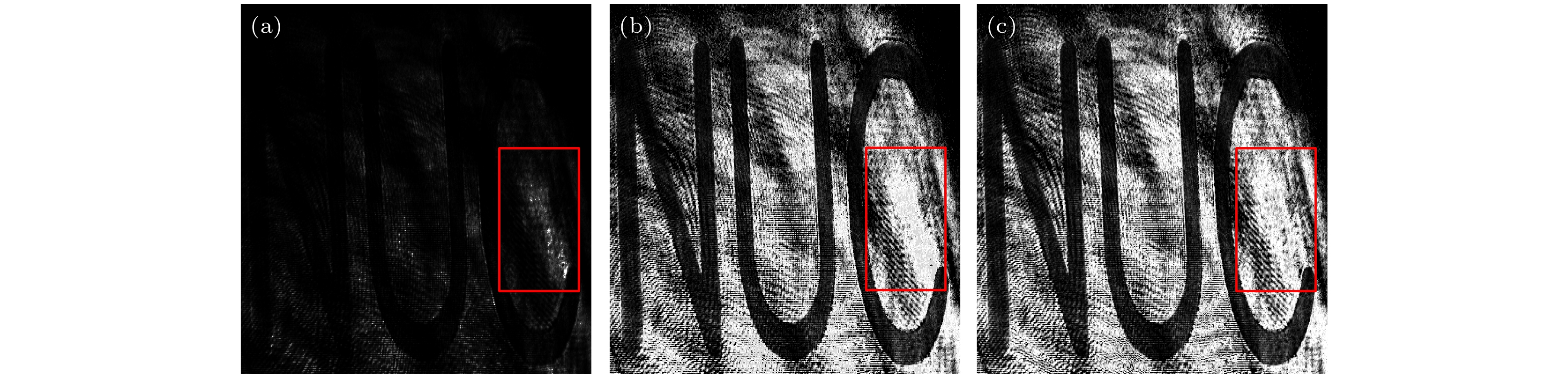
图 6 原子气室中自旋极化的二维成像 (a)未加磁场得到的背景图即激光光场直接成像; (b)加入磁场后的原子自旋极化图; (c)原子自旋极化图像减去激光光场成像的结果
Figure 6. Two-dimensional imaging of spin polarization in an atomic vapor cell: (a) The background image obtained without applying a magnetic field, namely, the direct imaging of the laser light field; (b) the atomic spin polarization image after applying a magnetic field; (c) the result of subtracting the laser light field imaging from the atomic spin polarization image.

图 7 极化原子动态成像图 (a)—(c)字符大小不断增大的原子自旋极化图, 图(a)中条纹的线宽对应7个柱状微镜, 宽度为95.9 μm
Figure 7. Two-dimensional spin diagrams of atomic vapor cell: (a)–(c) Atomic spin polarization with increasing character sizes, the line width of the stripes in the panel (a) corresponds to 7 columnar micromirrors with a width of 95.9 μm.
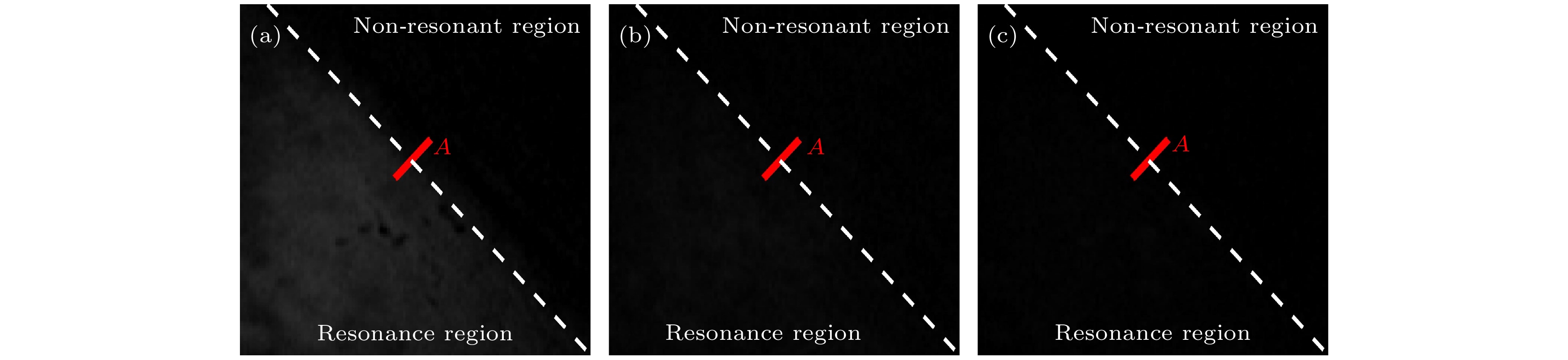
图 8 不同帧率下原子极化图 (a) 30 fps; (b) 150 fps; (c) 355 fps
Figure 8. Atomic polarization plots at different frame rates: (a) 30 fps; (b) 150 fps; (c) 355 fps.
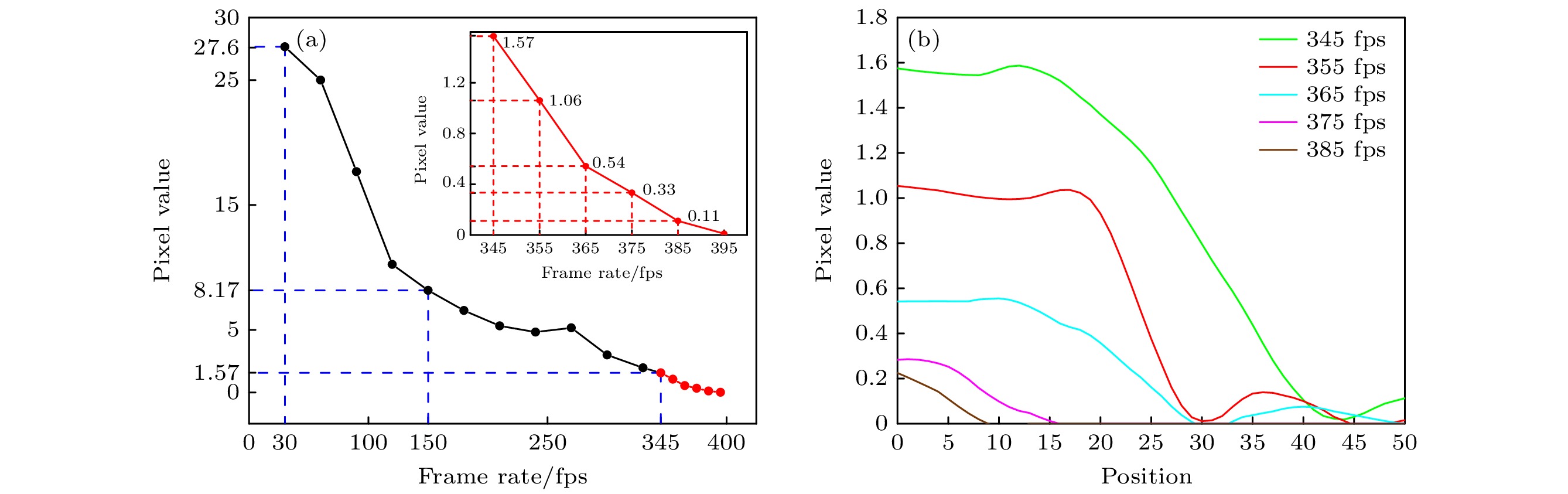
图 9 (a) 相机帧率在30—385 fps时直线A上像素值极差变化; (b)帧率分别在345, 355, 365, 375, 385 fps时直线A上像素值变化曲线图
Figure 9. (a) Variation of pixel value extremes on line A at camera frame rates from 30 fps to 385 fps; (b) graph of pixel value changes on line A at frame rates of 345, 355, 365, 375, and 385 fps respectively.

图 10 气室内高质量原子动态自旋成像图, 蚂蚁内部黑色部分为原子低极化态区域, 外部为高极化态区域, 自旋成像图分别展示了在帧率为355 fps时, 不同时间下的蚂蚁运动轨迹
Figure 10. Dynamic spin-imaging maps of atoms inside the vapor cell. The black part inside the ants is the region of low-polarized state of atoms, the outside is the region of high-polarized state, and the spin-imaging maps show the ants’ motion trajectories at different times at a frame rate of 355 fps, respectively.
-
[1] Albert M, Cates G, Driehuys B, Happer W, Saam B, Springer Jr, Wishnia A 1994 Nature 370 199 doi: 10.1038/370199a0 [2] Chupp T, Hoare R, Walsworth R, Wu B 1994 Phys. Rev. Lett. 72 2363 doi: 10.1103/PhysRevLett.72.2363 [3] Navon G, Song Y Q, Room T, Appelt S, Taylor R, Pines A 1996 Scienc 271 1848 doi: 10.1126/science.271.5257.1848 [4] Ishikawa K, Anraku Y, Takahashi Y, Yabuzaki T 1999 J. Opt. Soc. Am. B 16 31 doi: 10.1364/JOSAB.16.000031 [5] 郝传鹏 2022博士学位论文(合肥: 中国科学技术大学) Hao C P 2022 Ph. D. Dissertation (Hefei: University of Science and Technology of China [6] Savukov I, Romalis M 2005 Phys. Rev. Lett. 94 123001 doi: 10.1103/PhysRevLett.94.123001 [7] Xu S J, Yashchuk V, Donaldson M, Rochester S, Budker D, Pines A 2006 PNAS 103 12668 doi: 10.1073/pnas.0605396103 [8] Savukov I, Karaulanov T 2014 J. Magn. Reson. 249 49 doi: 10.1016/j.jmr.2014.10.009 [9] Young A, Appelt S, Baranga A, Erickson C, Happer W 1997 Appl. Phys. Lett. 70 3081 doi: 10.1063/1.119097 [10] Skalla J, Wackerle G, Mehring M 1997 Opt. Commun. 143 209 doi: 10.1016/S0030-4018(97)00364-7 [11] Skalla J, Wackerle G, Mehring M, Pines A 1997 Phys. Lett. A 226 69 doi: 10.1016/S0375-9601(96)00927-9 [12] Baranga A, Appelt S, Erickson C, Young A, Happer W 1998 Phys. Rev. A 58 2282 doi: 10.1103/PhysRevA.58.2282 [13] Giel D, Hinz G, Nettels D, Weis A 2000 Opt. Express 6 251 doi: 10.1364/OE.6.000251 [14] Savukov I 2015 J. Magn. Reson. 256 9 doi: 10.1016/j.jmr.2015.03.012 [15] Ito Y, Sato D, Kamada K, Kobayashi T 2014 IEEE Trans. Magn. 50 4006903 doi: 10.1109/TMAG.2014.2329856 [16] Nishi K, Ito Y, Kobayashi T 2018 Opt. Express 26 1988 doi: 10.1364/OE.26.001988 [17] Johnson C, Schwindt P 2010 IEEE International Frequency Control Symposium Newport Beach, CA, USA, June 4–6, 2010 p371 [18] Johnson C, Schwindt P, Weisend M 2010 Appl. Phys. Lett. 97 243703 doi: 10.1063/1.3522648 [19] Kominis I, Kornack T, Allred J, Romalis M 2003 Nature 422 596 doi: 10.1038/nature01484 [20] Gusarov A, Levron D, Paperno E, Shuker R, Baranga A 2009 IEEE Trans. Magn. 45 4478 doi: 10.1109/TMAG.2009.2021404 [21] Kim K, Begus S, Xia H, Lee S, Jazbinsek V, Trontelj Z, Romalis M 2014 NeuroImage 89 143 doi: 10.1016/j.neuroimage.2013.10.040 [22] Xia H, Baranga A, Hoffman D, Romalis M 2006 Appl. Phys. Lett. 89 211104 doi: 10.1063/1.2392722 [23] Mamishin Y, Ito Y, Kobayashi T 2017 IEEE Trans. Magn. 53 4001606 doi: 10.1109/TMAG.2017.2659649 [24] Dolgovskiy V, Fescenko I, Sekiguchi N, Colombo S, Lebedev V, Zhang J, Weis A 2016 Appl. Phys. Lett. 109 023505 doi: 10.1063/1.4958700 [25] Weis A, Colombo S, Dolgovskiy V, Grujic Z, Lebedev V, Zhang J 2017 J. Phys.: Conf. Ser. 793 012032 doi: 10.1088/1742-6596/793/1/012032 [26] Taue S, Toyota Y, Fujimori K, Fukano H 2017 22nd Microoptics Conference Tokyo, Japan, November 19–22, 2017 p212 [27] Dong H F, Chen J L, Li J M, Liu C, Li A X, Zhao N, Guo F Z 2019 J. Appl. Phys. 125 243904 doi: 10.1063/1.5099156 [28] 曹益平, 苏显渝, 向立群 2002 激光杂志 23 16 doi: 10.3969/j.issn.0253-2743.2002.04.007 Cao Y P, Su X Y, Xiang L Q 2002 Laser J 23 16 doi: 10.3969/j.issn.0253-2743.2002.04.007 [29] Ding Z C, Yuan J, Long X 2018 Sensors 18 1401 doi: 10.3390/s18051401 [30] Wyllie R 2012 Ph. D. Dissertation (Madison: University of Wisconsin-Madison [31] Dong H F, Yin L X, Li A X, Zhao N, Chen J L, Sun M J 2019 J. Appl. Phys. 125 023908 doi: 10.1063/1.5049609 [32] Mitsunaga T, Nayar S 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Fort Collins, CO, USA, July 6–9, 1999 p374 -
计量
- 文章访问数: 137
- HTML全文浏览数: 137
- PDF下载数: 3
- 施引文献: 0